
Abstract
Human smooth pursuit eye movements are principally driven by visual feedback and cannot normally be initiated at will. However, when tracking periodic motion, smooth eye movements reverse direction prior to target reversal, driven by anticipation, not visual feedback. Here, we investigate cognitive control over such eye reversals. Target stimuli were discrete double ramps—constant speed (30°/s) rightwards followed by similar leftward movement, reversal time ranging from 420 ms to 840 ms. Three experimental conditions were examined. In the precued condition, double ramps of randomised reversal time were presented. Prior to ramp presentation audio precues were given with an interval indicating start and reversal time of the unseen, upcoming double ramp. Subjects were able to use these cues to voluntarily control timing of anticipatory eye reversal, so that when occasional false precues gave underestimates of target reversal time, eye reversal occurred before target reversal. Precued eye reversal times were comparable to those in a second, predictable condition, in which double ramps with identical reversal time were given repeatedly without precues. In contrast, reversal occurred much later in a third, reactive condition, also without precues, when unexpected early target reversals occurred sporadically within a series having identical, predictable reversal times. The findings provide evidence that timing of anticipatory smooth eye movement, both at the start of the double-ramp and at its reversal, can be independently controlled at will using non-motion-based timing cues.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
When a moving visual stimulus is initially presented to a subject there is normally a latency of approximately 100 ms before any ocular pursuit response, caused by delays in visual feedback (Carl and Gellman 1987; Robinson 1965). However, if target motion is periodic (e.g. sinusoidal) the initial delay is rapidly overcome after one or two cycles (Dallos and Jones 1963), resulting in elimination of phase error at low frequencies (<0.2 Hz). This evidence of predictive behaviour is particularly prominent when tracking a triangular waveform. The eye cannot follow precisely the abrupt change in velocity that occurs at each target reversal, and a compromise is made in which the eye starts to decelerate prior to the change of direction. A similar anticipatory deceleration can also be observed when the stimulus is a simple constant velocity (ramp) motion. If the ramp is of predictable duration the eye starts to decelerate before the end of the ramp (Wells and Barnes 1999; Pola and Wyatt 1997), whereas, if the ramp is terminated unexpectedly, there will be a 100 ms delay before the start of deceleration (Robinson et al. 1986). If the first ramp is followed by a second of known velocity, the early deceleration becomes merged with an anticipatory movement to the second ramp (Barnes and Asselman 1992; Boman and Hotson 1992; Barnes and Schmid 2002).
How is the timing of deceleration determined? In the case of a sinusoidal waveform there are inherent cues to its deceleration prior to reversal, whereas no such cues are available for a triangular wave stimulus. Past experiments have shown that, in the absence of such cues, information related to future target motion can be derived from at least two sources—the past history of target motion (Kowler et al. 1984; Jarrett and Barnes 2002), and symbolic precues (Kowler 1989; Jarrett and Barnes 2001; Jarrett and Barnes 2002)—and used to volitionally grade the speed, and select the direction, of anticipatory smooth pursuit movements. It has also been shown that subjects can use prior timing cues to time the release of anticipatory movements (Barnes and Donelan 1999). In this previous experiment, timing cues occurred with a fixed interval prior to target onset and subjects were able to use this interval information to release anticipatory activity at an appropriate time prior to target onset. Although effective over a wide range of timing cue intervals (240–1,200 ms), cue time was fixed within runs, allowing subjects ample opportunity to store timing information. In the present experiment similar timing cues were used to initiate anticipatory pursuit prior to the first ramp of a double ramp. However, the principal objective of this experiment was to determine whether subjects could, in addition, use separate, advance timing cues to pre-programme the reversal time of their pursuit response to a double-ramp stimulus, even when the duration of the ramp components was randomised from one trial to the next. In this Precue condition, subjects were able to store the advance information and use it to anticipate the randomly timed change in direction at the end of the first ramp. These results were compared with two control conditions. In the Predictable condition the development of anticipation in the timing of pursuit reversals was investigated by presenting repeated double-ramp stimuli that always reversed direction at the same time (Barnes et al. 2004). In the Reactive condition, ocular pursuit was examined when subjects responded to an unexpected target reversal that occurred earlier than they expected based on prior target motion.
Methods
Following local ethical committee approval, seven healthy subjects gave their informed consent to participate. All subjects had normal or corrected-to-normal vision, and had prior experience of oculomotor tasks.
Eye movements were recorded by an infrared limbus tracking technique (Skalar IRIS) with a resolution of 5–10 min of arc; they were low pass filtered at 80 Hz (4-pole Bessel) and sampled at 4 ms intervals. Eye movements were analysed by identifying and removing the fast phase components of the response using a technique described previously (Bennett and Barnes 2003), based on a combination of threshold criteria for acceleration (750°/s2) and velocity (40°/s). A linear interpolation routine was used to bridge the gaps produced by removal of saccades from the eye velocity trajectory.
Subjects sat in a dark room, 1.5 m in front of a white screen, their heads stabilised by a chin rest and lateral head-pads. A projected cluster of LEDs (luminance 0.5 cd/m2) formed the target—a red annulus 1° in diameter that moved under the control of a motor-driven mirror.
Target motion was always a constant velocity (30°/s) double-ramp stimulus—moving rightwards from 9° left of centre then returning leftwards with a varying time of reversal (Trev). The intertrial interval (blank screen) varied randomly from 1.0 s to 1.7 s. Two small, stationary vertical lines (each 2° in height) were back projected 3° above and below the target start-point (9° left of centre) and acted as fixation cues indicating where target motion started. They remained illuminated throughout each experimental run.
The purpose of the Precue condition was to test subjects’ ability to use advance timing information, in the form of non-motion-based audio precues, to pre-programme both the initiation of anticipatory movement to the first ramp and the anticipatory reversal of ocular pursuit to the second ramp. Each trial consisted of three identical trains of audio precues (each of 80 ms duration; 60 dB). Each train consisted of an initial warning cue (500 Hz) followed 600 ms later by two timing cues of different pitch (400 Hz), the interval between the timing cues signalling the duration of the first ramp of the upcoming double-ramp target (Fig. 1). The interval between warning cues was 2.56 s. During the third train of audio cues only, target motion onset occurred simultaneously with the onset of the first timing cue, the target moving rightwards until the onset of the second timing cue, at which time it simultaneously reversed leftwards for an identical duration. The target was illuminated only for the period of the double-ramp (i.e. 2×Trev). During the first two trains of cues the target was illuminated for two periods equal to that of the double-ramp (Fig. 1), but remained stationary (i.e. a double-ramp of zero velocity). Subjects were instructed to fixate the stationary target during the first two cue trains while they attempted to garner timing information from the cue intervals. Rehearsal of any movement was prohibited. During the third train of cues, subjects were instructed to track the target as accurately as possible, and to use the timing information they had derived from the precues to anticipate the time of target reversal. The time of target reversal (Trev), and hence the interval between the timing cues, varied randomly between trials in eight 60 ms steps (420–840 ms), with the restriction that there were two instances of each Trev in every run. There were four precue runs of 16 trials each, giving a total of eight responses to each of the eight Trev values. In each of the precue runs, two of the trials (12.5%) were catch trials, wherein the interval between the timing cues gave an underestimate of Trev. Specifically, precues indicated Trev=600 ms when actual Trev was 720 ms; or precues indicated Trev=660 ms when actual Trev was 780 ms. One example of each false precue was given per run, giving a total of eight catch trials.

Recording from one subject during the Precue condition showing a single trial in which Trev=720 ms. The upper panel shows eye and target displacement traces, with the target (right-hand scale) displaced 5° above the eye (left-hand scale). The solid lines in the target trace indicate the duration of visibility, the gaps representing intervening periods of target blanking. The target moved only during the third train of audio cues (shown by the lower traces in the upper panel), each train consisting of an initial warning cue (black) followed by two precues (grey) indicating double-ramp timing. The lower panel shows target and eye velocity. The desaccaded eye velocity trace (black) is overlaid on the original trace (with saccades included), to illustrate the paucity of saccades (the grey spikes) around the time of taget onset and reversal.
The purpose of the Predictable condition was to observe the anticipation of target direction reversals that occurred in response to identical double-ramp targets that repeatedly reversed direction at the same time. Each trial was preceded by an audio warning cue (80 ms duration; 60 dB; 500 Hz) 600 ms before target onset and the target was only visible during the double ramp. The Trev was identical for seven consecutive trials within a block, with a fixation trial (warning cue; no target motion) interposed between each randomised change in Trev. To derive the average steady state values of eye velocity for each Trev, the first two presentations of each block were ignored, yielding a total of five values. Each of the eight Trev values (ranging in 60-ms steps from 420 ms to 840 ms) was examined twice in this manner in two separate runs, yielding a total of ten values for the average steady state response at each Trev.
The purpose of the Reactive baseline condition was to reveal the delay in eye reversal when subjects reacted to a target reversal that occurred earlier than they expected. On 40 out of 48 trials within a run, subjects were presented with an identical double-ramp target that reversed after 960 ms (i.e.longer than all Trev values examined in the Precue and Predictable conditions). Again, the target was only visible during the double ramp. The remaining 16.6% of trials (every 3–9 trials; randomly determined) were probe trials in which the target unexpectedly reversed earlier, at one of eight randomly determined times. For these, Trev ranged from 420 ms to 840 ms in 60 ms steps. The randomisation was restricted such that each of these earlier values of Trev was encountered once within each run of 48 trials. Each subject undertook eight Reactive runs, yielding eight responses at each Trev. Cue and fixation conditions were as for the Predictable condition. This method of determining the reactive response was used in an attempt to force subjects not to make the early anticipatory reversals that can occur with randomised ramp durations (see Barnes et al. 2004).
All experimental runs were presented in a balanced, randomised design in two sessions separated by at least 24 h. Subjects were told which condition would be presented prior to the start of each run. They were given specific instructions about how the visual motion stimuli would be presented in each condition, and they were instructed to follow the target as accurately as possible. A practice block of the Predictable condition was given prior to the experiment.
Measured variables
Anticipatory pursuit prior to the first ramp was assessed by calculating eye velocity (V50) 50 ms after target onset, this representing a time well before the influence of visual feedback (>80 ms). V50 values were calculated as the average of data points from 30 ms to 70 ms after target onset. The moment of eye reversal (Tcross) was identified as the point at which eye velocity crossed through 0°/s after pursuit of the first, rightward ramp and is given in relation to target onset. The value of Tcross was determined by carrying out a linear regression on data from 100 ms before to 100 ms after the time at which eye velocity initially crossed through zero. Anticipatory slowing of the eyes prior to actual reversal was measured by identifying the time from target onset at which eye velocity dropped to 80% of target velocity (T80; see Fig. 3c). Analysis of the Precue catch trials included calculation of the eye velocity 50 ms after the time of target reversal (Vrev50) (i.e. just prior to the time at which visual feedback from the unexpected continuation of the first ramp would start to have influence). In the Reactive condition probe trials, the time to react (Treact) was identified as the time at which eye velocity fell consistently outside the 95% confidence interval associated with the steady state response (the average of all non-catch-trials, excluding the first two trials of each block) for at least 200 ms. Measured variables were compared by analysis of variance using SPSS software. Prior to analysis, the data were tested for normality (Shapiro-Wilk test), and before ANOVA, the Mauchly test was applied to determine the sphericity of the data. Where this was found to be significant, the Greenhouse-Geisser correction was applied to determine significance.
Results
General observations
In the Precue condition, subjects were able to use stored timing information derived from prior audio cues to control the time of anticipatory eye reversal in their responses to almost all reversal times (Fig. 1). The exception was for the shortest Trev (420 ms), where three subjects could not quite achieve this, their T80 values (indicating initiation of deceleration) being slightly greater than Trev. Note that early deceleration occurred without prior observation of target motion or any rehearsal of eye movement. Subjects were also able to use the warning cues to generate anticipatory pursuit to the first ramp, as observed previously (Barnes and Donelan 1999). The anticipatory eye movements at onset and reversal were predominantly smooth, rather than saccadic (see Fig. 1). In fact, when the distribution of saccades was examined, few were found to occur within the time window from 60 ms before, to 60 ms after, target onset (only one in ten in the Precue condition; Fig. 2a). The majority of saccades occurred over 120 ms after target onset and were predominantly catch-up saccades (i.e. to the right when the target was moving to the right). Saccadic activity at the time of direction change was also minimal (Fig. 2b), with a total of 364 out of a group total of 448 responses (across all subjects) having no saccades within ±120 ms of target reversal. Inspection of these saccades showed that 81 out of 84 were in the same direction (rightward) as the first ramp and therefore not contributing to the direction change (Fig. 2b). The majority of saccades occurred over 180 ms after the change of direction (Fig. 2b), and were corrective for positional errors at that time (i.e. to the left when the target was moving to the left).

The distribution of saccades within 60 ms bins at the onset of the first ramp (a) and the reversal of target direction (b) in the Precue condition. This represents the total number of saccades from all subjects and all values of Trev. The timebase is aligned with onset in (a) and reversal in (b). Right-going saccades are shown in black, left-going in white.
In the Predictable condition, appropriate anticipation of predictable target reversals developed with successive exposures to a target that repeatedly reversed direction at the same instant. Initially the eye overshot the end of the first ramp and large reverse saccades were needed to bring the eye back onto the target. However, with repetition, the degree of overshoot diminished and the time at which eye velocity crossed through zero (Tcross) fell toward a steady state level over the first 3–4 trials of identical Trev. Planned contrasts confirmed significant successive reduction in Tcross (P<0.05) over the first three trials only.
In the Reactive condition, the expectancy of a more prolonged (960 ms) first ramp led to a lengthy delay between target and eye reversal in the probe trials with shorter Trev (Fig. 3).

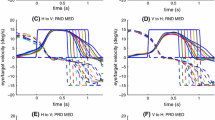
Eye velocity traces of a single subject in the Predictable (PRD - red), Precue (PRE - green) and Reactive (RCT - blue) conditions in response to a target of Trev = 420 ms (a) and Trev = 660 ms (b). Shading indicates ±SD for RCT and PRE conditions. c Mean eye velocity traces averaged across seven subjects (±SE shown by shading). T80 was calculated as the time at which eye velocity descended through the dashed line in (c), Tcross as the time at which it crossed throught zero velocity. Time is referred to target onset. Performance in the PRD and PRE conditions is similar, in contrast to the RCT condition where there was a much greater delay before velocity reversal.
Comparison between conditions
Figure 3a, b, compare the averaged velocity profiles in a single subject for all conditions and for two representative values of Trev: 420 ms and 660 ms. The intrasubject variance (±SD) indicated for the Precue and Reactive conditions was typical of all subjects. It was similar for the Predictable condition, but is omitted for clarity. Figure 3c shows the average response of the seven subjects (±SE) for Trev = 660 ms and shows a similar difference between conditions to that of the single subject.All subjects made anticipatory smooth pursuit eye movements prior to the first ramp component in all conditions in response to the initial warning cue as revealed by the calculation of T20, the time to reach 20% of target velocity (6°/s), which showed that this velocity was reached within in at least 80 ms of target onset in all subjects. Mean T20 values (±SE) were 3.1 ms (±7.4), −23.6 ms (±10.7), and −34.2 ms (±12.9), in the Precue, Predictable and Reactive conditions, respectively. ANOVA on V50 values revealed no significant effect of condition or Trev. Values for V50 (±SE) averaged across all Trev were 9.75(±2.09)°/s, 12.17(±2.31)°/s and 11.95(±2.03)°/s for the Precue, Predictable and Reactive conditions, respectively.
Average eye velocity trajectories in the Precue and Predictive conditions were also similar around the time of target crossover, whereas there was a much greater lag between the target and eye reversal in the probe trials of the Reactive condition (Fig. 3). On average, reversal in eye direction in the Reactive condition, as identified by Treact (see “Measured Variables”), did not even begin until 133.5 ms (SE=12.2 ms) after target reversal had occurred, whereupon it took a further ~100 ms before eye velocity crossed through zero. Values for Tcross were compared across conditions (Precue, Predictable and Reactive) and values of Trev by two-way analysis of variance (ANOVA); Tcross increased significantly with Trev [F(7,42)=86.31; P<0.001] and condition [F(2,12)=51.90; P<0.001]. However, there was also a significant interaction between condition and Trev, reflecting the different rate of increase of Tcross with Trev across conditions (Fig. 4). Planned contrasts indicated that Tcross values for the Predictable and Precue conditions were not significantly different [F(1,6)=2.42; P=0.171] whereas Tcross in the Precue condition was significantly less than in the Reactive condition probe trials [F(1,6)=53.99; P<0.001].

Mean values of a Tcross and b T80 as a function of Trevfor the Predictable (PRD), Precue (PRE) and Reactive (RCT) probe-trial conditions. The dashed lines in (a) and (b) represent actual Trev. Mean of seven subjects +1 SE.
ANOVA on the T80 values also revealed significant main effects of condition [F(2,12)=127.58; P<0.001] and Trev [F(7,42)=43.54; P<0.001], and a significant interaction between Trev and condition. Repeated contrasts revealed that T80 in the Precue condition was significantly less than in the Reactive condition probe trials [F(1,6)=224.59; P<0.001]. The difference in T80 between the Precue and Predictable conditions lay close to the boundary for significance [F(1,6)=5.70; P=0.054]; from inspection (Fig. 3) it was evident that T80 values were very similar for Trev up to 660 ms, but diverged for higher Trev values. Note that T80 in the Reactive condition was actually less than Trev at 840 ms. This occurred because even the response to the predominant Trev of 960 ms was actually showing anticipatory decline in velocity at this time (i.e. at 840 ms).
Precue catch trials
In the Precue catch trials, subjects’ responses to false precues that gave an underestimate of Trev were compared with (1) their responses to veridical cues that accurately indicated the same Trev falsely indicated in the catch trial (T Arev ) and (2) with their responses to veridical cues that indicated the actual Trev that occurred in the catch trial (T Brev ). When false cues gave an underestimate of Trev in the Precue catch trials, subjects generated a response that was similar to that of T Arev for ~100 ms after the expected target reversal and less than that for T Brev (Fig. 5). To compare false and veridical cue responses, ANOVA was conducted on Vrev50 with false cue interval (600 ms and 660 ms) and response type (false Trev cue, T Arev and T Brev ) as factors. There was a significant effect of response type [F(2,8)=10.63; P=0.003], but not false cue interval. Planned contrasts on response type showed that there was no significant difference between Vrev50 values for the false Trev cue and T Arev but there was a significant difference between the false Trev cue and T Brev [F(1,5)=25.70; P=0.004]. As a consequence of the false cue, Tcross occurred significantly earlier [F(1,6)=13.84; P=0.01] in the catch trial than when cues were veridical for actual Trev (Fig. 4). In fact, eye reversal occurred close to Trev when false cues indicated Trev=600 ms (Fig. 5a) and actually preceded target reversal when the false cue indicated Trev=660 ms (Fig. 5b).

Averaged velocity traces from the two types of catch trial in the Precue condition in which false Trev = 600 ms, actual Trev = 720 ms (a) and false Trev = 660 ms, actual Trev = 780 ms (b). Time is referred to target onset. Blue traces show responses to veridical cues equivalent to the false cue (T Arev ) ; green traces are responses to the actual cue (T Brev ) with ±SE indicated by shading. Red lines indicate false cue responses (SE similar to veridical responses, but omitted for clarity). Subjects’ eye movements reversed significantly earlier after false precues gave an underestimate of target reversal time. Mean of seven subjects.
Discussion
We have shown that advance information, presented in the form of non-motion-based audio precues, can be stored and used to pre-programme both the initiation of anticipatory smooth eye movement to the first ramp of a double-ramp target stimulus and the initiation of an anticipatory reversal prior to the second ramp. To accomplish this it was actually necessary for subjects to store information related to two time intervals; one of fixed duration (the warning cue) that was required to time the release of anticipatory movement to the first ramp; the second of variable duration (the pair of timing cues) required to time eye reversal. Moreover, the anticipatory reversal was accomplished even though the target motion itself could not be seen at the time of precue presentation and movement rehearsal was prohibited, implying storage of timing in a form that is independent of any actual ocular motor output. In addition, this timing of anticipatory reversal was accomplished without any loss of the ability to generate anticipatory movements to the first ramp, as verified by the similarity of V50 values in all conditions. Taken together with previous research showing that non-motion-based precues can be used to successfully control the velocity of anticipatory responses to ramp targets of random speed and direction (Jarrett and Barnes 2002), these results show how the key movement parameters of speed, direction and timing can be cognitively pre-programmed using advance information. This contrasts with the normal situation in which, without a target present or expected, and in the absence of advance information, most people are unable to generate smooth pursuit eye movements at will (Heywood and Churcher 1971).
To reveal evidence of anticipation at reversal in the Precue and Predictable conditions, responses were compared with those in the baseline Reactive condition, in which subjects reacted to an unexpected change in stimulus direction. Based on Tcrossvalues, observed eye reversal in the Reactive condition probe trials (Fig. 4) occurred at least 182 ms after target reversal, reflecting the time taken for the processing of reversed target velocity feedback (at least 80–100 ms), followed by the time taken for eye velocity to decay toward zero. Using the Reactive condition probe trials as a nonpredictive baseline, it is clear that the eye reversals in the Precue and Predictable conditions were indeed anticipatory.
In the case of the Predictable condition, eye velocity started to decline well before the end of the first ramp in the steady state (Figs. 3 and 4). This behaviour is well known from previous single-ramp experiments (e.g. Robinson et al. 1986; Pola and Wyatt 1997) and has been shown to be pre-programmed (Barnes et al. 2004). It is also evident in double-ramp responses in the form of anticipatory changes occurring prior to the second ramp (Boman and Hotson 1992; Barnes and Schmid 2002). When deceleration occurs before the end of the first ramp, visual feedback will still have some effect on eye velocity, effectively slowing its decay. The time at which eye velocity starts to decelerate (estimated by T80) therefore gives a better indication of prediction onset. In the Predictable condition, T80 increased monotonically with Trev. Because T80 occurred prior to target reversal for all levels of Trev, this scaling in proportion to Trev must have been based on timing information derived from prior target presentations—it was certainly not modulated by the effects of visual feedback as in the Reactive condition probe trials. Although T80 occurred before reversal, Tcross was still greater than Trev by as much as 152 ms (mean for Trev = 420 ms). Nevertheless, these responses were still predictive when referred to the Reactive condition.
In the Precue condition, a similar effect prevailed for low values of Trev (≤660 ms). In fact, there was a negligible difference in mean T80 or Tcross values between the Predictable and Precue conditions across this range, indicating that the timing could be derived just as effectively from precues as from prior experience of actual target motion. The strong influence of precues on timing was reinforced by the finding that false cues in catch trials caused subjects to reverse their eyes earlier than appropriate for the actual Trev (Fig. 5), their velocity trajectories closely following those appropriate to the false cue for at least 100 ms after expected target reversal. At longer Trev (>660 ms), a different picture emerged, with T80 values remaining relatively constant, possibly because the effect of precues had less influence than the increasing expectancy of target reversal as Trev approached the limits of its range. Because target velocity remained constant in the Precue condition, it is possible that timing per se was not the controlled factor, but rather that the precues were converted to displacement estimates on the basis of past association. However, this does not detract from the fact that subjects used non-motion-based cues to pre-programme ocular pursuit reversals.
Because of the delays inherent in sensory and efferent processing, the known ability of humans to track periodic stimuli with almost zero phase error (Dallos and Jones 1963) must depend on an anticipatory mechanism (Barnes and Asselman 1991). Whereas previous work has prioritised the use of visual feedback in ocular pursuit control (e.g. Robinson et al. 1986), the present findings show that, given expectancy of a target reversal, subjects can use exogenous cues to voluntarily initiate a change in direction through zero velocity, directly opposing visual feedback. These observations help explain how subjects in the study of Madelain and Krauzlis (2003) were able to wilfully reverse the direction of both their perceived motion of an ambiguous apparent motion stimulus, and their ocular pursuit of that stimulus.
To use audio timing precues, subjects were dependent first of all upon their ability to perceive the timing information inherent in the precues, second, to store that information and third, to reproduce that same time interval in their motor output without having seen the motion stimulus. These concepts related to timing are not new (Stevens 1886; Dunlap 1910) and have been investigated extensively in relation to repetitive motor activities such as finger tapping (Wing and Kristofferson 1973a, 1973b). Variability of timing normally increases as the time interval increases, but there is little effect on the average accuracy of timing over the range of intervals used here. Many models have been postulated to explain how temporal behaviour might be controlled. Most (e.g. Creelman 1962; Treisman 1963; Gibbon et al. 1984) but not all (Miall 1992; Staddon and Higa 1999) encompass the concept of an internal clock (pacemaker), that emits pulses at regular intervals, and a working memory that accumulates the clock pulses. Evidence exists for timing mechanisms being subserved by the basal ganglia (e.g. Harrington et al. 1998), prefrontal areas (e.g. Rao et al. 2001), the cerebellum (e.g. Ivry and Keele 1989) and parietal cortex (e.g. Coull et al. 1998). There is disagreement over whether timing information can be isolated from motor processing in these networks, although current evidence suggests that this may depend on task requirements (Lewis and Miall 2003). Our results provide evidence that, for the task we have used, timing control can be derived from an independent, non-motor source, the auditory cues, and subsequently applied to a motor process.
Conclusion
The present findings show that advance timing information derived from non-motion-based precues giving information about two time intervals can be used by human subjects to pre-programme both the initiation of anticipatory pursuit to one ramp and the reversal of eye movement before the start of a second ramp. This adds to previous findings indicating that direction and speed of smooth eye movements can also be controlled at will, these voluntary mechanisms acting in conjunction with visual feedback.
References
Barnes GR, Asselman PT (1991) The mechanism of prediction in human smooth pursuit eye movements. J Physiol (Lond) 439:439–461
Barnes GR, Asselman PT (1992) Pursuit of intermittently illuminated moving targets in the human. J Physiol (Lond) 445:617–637
Barnes GR, Donelan AS (1999) The remembered pursuit task: evidence for segregation of timing and velocity storage in predictive oculomotor control. Exp Brain Res 129:57–67
Barnes GR, Schmid AM (2002) Sequence learning in human ocular smooth pursuit. Exp Brain Res 144:322–335
Barnes GR, Collins CJS, Arnold LR (2004) Predicting the duration of ocular pursuit in humans. Exp Brain Res 160:10–21
Bennett SJ, Barnes GR (2003) Human ocular pursuit during the transient disappearance of a moving target. J Neurophysiol 90:2504–2520
Boman DK, Hotson JR (1992) Predictive smooth pursuit eye movements near abrupt changes in motion direction. Vis Res 32:675–689
Carl JR, Gellman RS (1987) Human smooth pursuit: stimulus-dependent responses. J Neurophysiol 57:1446–1463
Coull JT, Frackowiak RS, Frith CD (1998) Monitoring for target objects: activation of right frontal and parietal cortices with increasing time on task. Neuropsychologia 36:1325–1334
Creelman CD (1962) Human discrimination of auditory duration. J Acoust Soc Am 34:582–593
Dallos PJ, Jones RW (1963) Learning behaviour of the eye fixation control system. IEEE Trans Ac 8:218–227
Dunlap K (1910) Reactions to rhythmic stimuli, with attempt to synchronize. Psychol Rev 17:399–416
Gibbon J, Church RM, Meck WH (1984) Scalar timing in memory. Ann New York Acad Sci 423:52–77
Harrington DL, Haaland KY, Hermanowicz N (1998) Temporal processing in the basal ganglia. Neuropsychology 12:3–12
Heywood S, Churcher J (1971) Eye movements and the afterimage, 1: tracking the afterimage. Vis Res 11:1163–1168
Ivry RB, Keele SW (1989) Timing functions of the cerebellum. J Cognit Neurosci 1:136–152
Jarrett CB, Barnes GR (2001) Volitional selection of direction in the generation of anicipatory smooth pursuit in humans. Neurosci Lett 312:25–28
Jarrett CB, Barnes GR (2002) Volitional scaling of anticipatory ocular pursuit velocity using precues. Cogn Brain Res 14:383–388
Kowler E (1989) Cognitive expectations, not habits, control anticipatory smooth oculomotor pursuit. Vis Res 29:1049–1057
Kowler E, Martins AJ, Pavel M (1984) The effect of expectations on slow oculomotor control, IV: anticipatory smooth eye movements depend on prior target motions. Vis Res 24:197–210
Lewis PA, Miall RC (2003) Distinct systems for automatic and cognitively controlled time measurement: evidence from neuroimaging. Curr Opin Neurobiol 13:250–255
Madelain L, Krauzlis RJ (2003) Pursuit of the ineffable: perceptual and motor reversals during the tracking of apparent motion. J Vis 3:642–653
Miall RC (1992) Oscillators, predictions and time. In: Macar F, Pouthas V, Friedman WJ (eds) Time, action and cognition. Kluwer, Dordrecht, pp 215–227
Pola J, Wyatt HJ (1997) Offset dynamics of human smooth pursuit eye movements: effects of target presence and subject attention. Vis Res 39:2767–2775
Rao SM, Mayer AR, Harrington DL (2001) The evolution of brain activation during temporal processing. Nat Neurosci 4:317–323
Robinson DA (1965) The mechanics of human smooth pursuit eye movements. J Physiol (Lond) 180:569–591
Robinson DA, Gordon JL, Gordon SE (1986) A Model of the smooth pursuit eye movement system. Biol Cybern 55:43–57
Staddon JER, Higa JJ (1999) Time and memory: towards a pacemaker-free theory of interval timing. J Exp Anal Behav 71:215–251
Stevens LT (1886) On the time-sense. Mind 11:393–404
Treisman M (1963) Temporal discrimnation and the indifference interval: Implications for a model of the “internal clock”. Psychol Monogr Gen Appl 77:1–31
Wells SG, Barnes GR (1999) Predictive smooth pursuit eye movements during identification of moving acuity targets. Vis Res 39:2767–2775
Wing AM, Kristofferson AB (1973a) Response delays and the timing of discrete motor responses. Percept Psychophys 14:5–12
Wing AM, Kristofferson AB (1973b) The timing of interresponse intervals. Percept Psychophys 13:455–460
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Jarrett, C., Barnes, G. The use of non-motion-based cues to pre-programme the timing of predictive velocity reversal in human smooth pursuit. Exp Brain Res 164, 423–430 (2005). https://doi.org/10.1007/s00221-005-2260-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-005-2260-7