
Abstract
The effect of force on intensive and spatial processing was examined with three measures of tactile sensitivity. One of the measures based on intensive cues is the smooth-grooved (SM/GV) task, and the two other measures based on spatial cues are the grating orientation and gap detection tasks. Measures were made at two locations that vary in sensitivity and in the density of innervation of the primary afferent fibers, the right index fingerpad and the palmar surface of the proximal phalanx (fingerbase). At each location, psychometric functions were generated for each of the three measures for two forces (50 and 200 g). The results indicated that increasing force led to marked improvement on the task that relied on intensive cues; however, on the tasks that relied on spatial cues, force had no effect on performance. Biomechanical measures were made of the depth to which the skin invades the grooves of the contactors (conformance) at the two test sites, with the two forces, and with different groove widths. Conformance was found to be a joint function of force and groove width. Further, performance on the SM/GV task could be predicted by the amount of conformance. The psychophysical results are consistent with the view that increasing conformance increases neural activity in the primary afferent fibers, and that this increase in neural activity improves SM/GV performance, but has little effect on the quality of the spatial image.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Recent studies have compared psychophysical performance on spatial and intensive tasks when these tasks are subjected to similar stimulus manipulations (Gibson and Craig 2002, 2005). Even when the tactile stimuli that are used are similar, the two types of tasks in these studies often reveal different functional relations. In the present study, the effects of force and the concomitant changes in conformance on intensive and spatial measures were examined. One of the major issues is whether a biomechanical measure, such as conformance, can account for the observed psychophysical results. One of the spatial tasks, grating orientation (GR/OR), requires subjects to identify the orientation of a domed, square-wave grating on the skin (Craig 1999; Craig and Kisner 1998; Craig and Lyle 2001; Gibson and Craig 2002; Johnson and Phillips 1981; Patel et al. 1997; Sathian and Zangaladze 1996; Van Boven and Johnson 1994a). The second spatial task, gap detection (GAP), requires subjects to discriminate between an edge and an edge containing a gap (Gibson and Craig 2005; Stevens et al. 2003; Stevens and Choo 1996; Stevens and Patterson 1995). The intensive task, smooth-grooved (SM/GV), uses the same gratings as the GR/OR task does, but in this case, subjects are asked to discriminate between a grooved and a smooth surface (Craig 1999; Essock et al. 1997; Gibson and Craig 2002; Johnson and Phillips 1981; Wheat and Goodwin 2000). In an earlier study, the effect that an intermediate surface, specifically a surgical glove, had on the GR/OR and SM/GV measures was examined (Gibson and Craig 2002). The glove had a considerable effect on the SM/GV task causing thresholds to double and triple. On the GR/OR tasks, however, the glove had little effect. Changing the site of stimulation from the more densely innervated fingerpad to the less densely innervated fingerbase and palm resulted in a significant increase in GR/OR thresholds, but almost no change in the SM/GV performance. In a second study (Gibson and Craig 2005), we examined the effects of contactor orientation on these three tasks. We found significant anisotropy for the GR/OR and GAP tasks, but little or no anisotropy for the SM/GV task.
Initially one might suppose that the SM/GV task should also be considered a spatial task, inasmuch as performance varies directly with groove width; however, results such as those noted lead to the conclusion that this task relies on an intensive neural code, such as the overall rate of firing from the first-order afferent fibers (Phillips and Johnson 1981). In the current study, additional stimulus variables were manipulated that might be expected to affect these two types of measures differentially, and that might reveal differences between spatial and intensive coding (Experiment 1). In addition, measures were made of skin mechanics, specifically conformance, and the relationship between skin conformance and psychophysical performance was examined (Experiment 2).
Conformance is defined as the depth of skin that protrudes into the groove of the contactor (Vega-Bermudez and Johnson 2004). With grooved surfaces, such as those used in the present study, the more skin that protrudes into the groove, the greater the curvature at the edge of the groove (Gibson and Craig 2002). The degree of curvature at the edge is important because slowly adapting type I (SAI) afferent fibers are very sensitive to skin curvature (LaMotte and Srinivasan 1987a, b). The sensitivity of SAI fibers to skin curvature makes them very sensitive to edges (Johansson et al. 1982; Johansson and Vallbo 1983; Phillips and Johnson 1981). The greater the curvature of the skin, the higher the impulse rate: this is particularly true for SAI afferent fibers (LaMotte and Srinivasan 1987a). Therefore, a stimulus manipulation that increases the amount of curvature should also increase the impulse rate in the afferent fibers, and would be expected to improve performance on a task that required discrimination based on intensity.
Several previous studies have measured spatial acuity and related the psychophysical results to the skin mechanics. Some of these studies have examined conformance (Vega-Bermudez and Johnson 2004), whereas others have examined compliance, the overall distance that a contactor indents the skin (Goldreich and Kanics 2003; Loomis 1985; Johnson and Phillips 1981; Woodward 1993). From these studies, it appears that increasing force from 0 to about 25 g substantially improves spatial acuity. It has also been reported that a large fraction of the conformance takes place as force increases from 0 to 40 g (Vega-Bermudez and Johnson 2004). One would expect a difference in performance between light forces and no force: As force approaches zero, performance likely becomes poorer because at zero force the skin will no longer conform to the contactor, and no information, spatial or otherwise, will be transmitted. Beyond 25 g spatial sensitivity seems to be unaffected for increased force (Johnson and Phillips 1981). It appears that increasing conformance beyond a certain level has little to no effect on performance of spatial tasks.
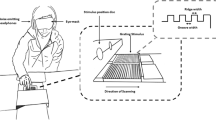
In the current study we examined the effects of force and conformance on the SM/GV, GR/OR, and GAP tasks. One reason for selecting these particular measures and stimuli is that the response of first-order afferent fibers to stimuli like these has been mapped. Phillips and Johnson (1981) used an aperiodic grating stimulus with bars 0.50 mm in width and grooves of varying widths. The grating was presented to the monkey’s fingerpad. The resulting spatial event plot shows that, for SAI fibers, edges are clearly represented by the peaks in the neural response profile. The information about the grooves and ridges appears to be represented by the distance between the peaks, a spatial code. Rate of firing, an intensive code, also varies as a function of groove width (Johnson and Phillips 1981). Specifically, as the groove width narrows, the overall rate of activity declines, and is lowest across the flat part of the stimulus. Rate of firing also varies with skin curvature; this is particularly true for the SAI afferent fibers (Vega-Bermudez and Johnson 1999; Werner and Mountcastle 1968).
One would expect that conformance should affect sensitivity in tasks that rely on intensive cues. Based on the Phillips and Johnson (1981) results, one would expect that changing conformance would affect the firing rates for fibers responding to edges but would not alter the overall quality of the spatial image, unless there was very little conformance. In short, the neurophysiological data would lead one to predict that changing conformance would affect intensive but not spatial measures of sensitivity.
The current study consists of two experiments. In Experiment 1, SM/GV, GR/OR, and GAP sensitivity were measured with two different levels of force. Two sites on the index finger were tested, the fingerpad and the fingerbase. In Experiment 2, conformance measurements were made with the same stimuli and conditions. The two testing locations were chosen for several reasons. First, data exist on the underlying neurophysiology for these locations (Darian-Smith and Kenins 1980; Johansson and Vallbo 1979). Second, psychophysical sensitivity at these two sites has previously been compared with the SM/GV, GR/OR, and GAP tasks (Gibson and Craig 2002, 2005). Finally, and most important, the Gibson and Craig (2002) study demonstrated the importance of testing across locations that vary in their density of innervation. It has been shown, for example, that density of innervation has a large and differential effect on the GR/OR and GAP tasks as compared to the SM/GV task. The goals of the present study are to determine the effect of force on the SM/GV task (an intensive measure), to see if the effects were different from those observed with the GR/OR and GAP task (spatial measures), and to see if skin conformance was a critical variable in predicting performance on these tasks.
Experiment 1
Method
Subjects
The subjects were students at Indiana University. All subjects were paid for their participation. The number of subjects used in each condition is given in Table 1. The subjects were selected from a larger group of subjects according to their schedules and availability. All subjects used in the study signed an informed consent prior to their participation, and the Human Subjects Institutional Review Board of Indiana University, Bloomington approved all procedures used in this study.
Stimuli
The stimuli for the SM/GV task were domed contactors with square-wave gratings cut into them. There was also one smooth contactor with no grooves. These contactors, JVP Domes, are commercially available from Stoelting Co. (Wood Dale, IL, USA). Each contactor has a series of equal-width grooves and ridges. The grooves are cut sufficiently deep so that the skin does not touch the bottom of the groove. The contactors are 19 mm in diameter. Each set consists of eight contactors with groove widths of 3, 2, 1.5, 1.2, 1, 0.75, 0.50, and 0.35 mm. In several conditions, thresholds exceeded 3 mm. For this reason, additional contactors were machined with larger grooves (6, 5, and 4 mm). These three additional contactors were also 19 mm in diameter. These same contactors were also used for the GR/OR task.
For the GAP task, the contactors were similar to those used by Stevens and coworkers and others (Gibson and Craig 2005; Stevens et al. 2003; Stevens and Choo 1996; Stevens and Patterson 1995). The contactors were made in pairs varying in overall length from 10.75 to 22 mm. Each member of a pair was the same overall length. The width of the contactors was 5 mm. One member of the pair had a gap cut into it, and the other had no-gap (Fig. 1). The gaps were cut such that 5-mm square posts were created at each end of the edge and were deep enough so that the skin did not touch the bottom of the contactor. Eleven contactors were used. The gap widths ranged from 0.75 to 12 mm.

Schematic drawing of a pair of contactors used in the GAP task (10-mm gap contactor). The width of the edges was 5 mm. For the gap contactor, the length of the gap was such that 5-mm square end posts were created. The overall length of the edge was the length of the gap plus the length of the end posts (after Gibson and Craig 2005)
Apparatus
A counter-weighted lever was used to present the contactors to the skin (Gibson and Craig 2002). An air shock was used to control and smooth the travel of the lever arm to which the contactor was attached. The apparatus was designed so that different forces could be presented at the same velocity.
Procedure
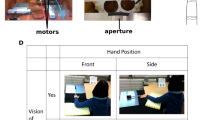
Sensitivity for the three tasks was measured at two different forces (50 and 200 g). These forces were selected because 50 g is close to the lower limit (Smith et al. 2002), and 200 g is just beyond the upper limit (Vega-Bermudez and Johnson 2004) of the normal forces used when making exploratory movements with the fingers. The velocity of the stimuli was held constant at 2 cm/s. Subjects were tested individually. Two locations on the right index finger were tested, specifically the index fingerpad (15 mm proximal to the distal end of the fingernail) and the fingerbase (centered on the palmar surface of the proximal phalanx). During each session, the subjects were seated with their right arms extended with the medial edge of the palm resting on the table. The subject’s finger was supported on a shelf so that the contactor could be brought into contact with the test site. The subjects were instructed not to move their hands or fingers during testing. Each trial began with the experimenter presenting the contactor and ended with the subject’s response. The contactor remained in contact with the subject’s skin until the subject responded (approximately 1–2 s), at which time the experimenter removed the contactor. During testing, the subjects were instructed to keep their eyes closed.
For the SM/GV task, subjects were instructed that two different contactors would be used. Subjects were told that one of the contactors was “smooth” and the other “grooved.” On each trial, they were to respond either “smooth” or “grooved.” The grooved contactor was presented with the grooves oriented along the proximal–distal axis of the finger. To reduce the possibility that thermal cues might help the subjects discriminate between the smooth contactor and the grooved contactor, all contactors were warmed to approximately skin temperature (Craig 1999).
For the GR/OR task, the subjects were instructed that a grooved contactor would be presented in one of two orthogonal orientations, with the grooves aligned along the proximal–distal axis or along lateral–medial axis of the finger. The orientations were explained to the subjects. On each trial, they were to respond with either “proximal” or “lateral.” Subjects then received several practice trials during which they kept their eyes closed.
For the GAP task, subjects were instructed that two different contactors would be used (an edge with no-gap and an edge with a gap). Both contactors were shown and explained to the subjects. On each trial, subjects were to respond with either “gap” or “no-gap.” The alignment of the edge of the contactor was along the lateral–medial axis of the finger. In all three conditions, the stimuli were demonstrated with the subject observing the presentation. Subjects then received several practice trials during which they kept their eyes closed. During the practice trials in all three tasks, the subject received feedback; however, no feedback was provided during testing.
In all three tasks, the subjects were randomly assigned to start with either 50- or 200-g force. Thereafter, they alternated sessions between the two forces. All of the data were collected for a single task before the next task was begun. For each task, subjects were tested over six sessions (three at 50 g, three at 200 g). A session consisted of six blocks of 30 trials each for a total of 180 trials per session. In each task, six groove (gap) widths were tested. The dimensions of the contactors, groove widths and gap lengths, for the various conditions are presented in Table 2.
Results and discussion
The results from the SM/GV task are shown in Fig. 2, percent correct as a function of the log of the groove width. It appears that increasing force from 50 to 200 g improves subjects’ ability to discriminate between the smooth and grooved contactors. A repeated-measures ANOVA confirmed what Fig. 2 indicates: there is a significant effect of force at both the fingerpad and the fingerbase [F(1,4)=88.17, P<0.01; F(1,4)=180.01, P<0.01, respectively]. There was also a significant interaction between force and groove width at the fingerpad, but not the fingerbase [F(5,20)=4.98, P<0.01; F(5,20)=0.74, P=0.60, respectively]. The interaction at the fingerpad is likely due to the convergence of the functions at 100% correct performance and at 50% correct, chance. At the fingerbase we would not have expected there to be an interaction inasmuch as the two functions are so widely separated and parallel across the linear portions of the functions. As expected, there was a significant effect of groove width at both the fingerpad and the fingerbase as well [F(5,20)=143.17, P<0.01; F(5,20)=56.36, P<0.01, respectively].

Percent correct as a function of log groove width in millimeter at the fingerpad and fingerbase for both 200 and 50 g of force for the SM/GV task. Error bars represent ±1 standard error of the mean. The horizontal dashed line represents 75% correct performance. Each psychometric function has been fitted with a sigmoidal curve using Eq. 1
Using non-linear regression the data were fit with a four-parameter sigmoid function (Eq. 1), where two of the parameters were constrained so that the functions fit between 50 and 100% performance. In this study, 75% correct (halfway between chance and 100%
correct) has been adopted as a threshold measure (Johnson and Phillips 1981). The threshold was calculated using the parameter values and solving Eq. 1 for x for a known value of y (75%). The thresholds for the SM/GV task at 50 and 200-g force are presented in Table 3. As can be seen, threshold decreased by 26% at the fingerpad, and by 62% at the fingerbase with increasing force.
The results from the GR/OR task are shown in Fig. 3, percent correct as a function of the log of the groove width. Increasing force from 50- to 200-g force did not appear to produce an increase in performance at either of the two sites. A repeated-measures ANOVA confirmed what the results in Fig. 3 indicate: There was no significant difference between the 50 and 200-g force conditions at either the fingerpad or the fingerbase [F(1,4)=0.26, P=0.64; F(1,4)=0.16, P=0.71, respectively]. As expected, there was a significant effect of groove width at both the fingerpad and the fingerbase [F(5,20)=58.35, P<0.01; F(5,20)=55.34, P<0.01, respectively]. The data were again fit with a sigmoidal function (see Eq. 1) and the thresholds calculated. The thresholds are shown in Table 3. As can be seen, there is a 1% increase in threshold with increasing force at the fingerpad, and a 13% increase in threshold with increasing force at the fingerbase.

Percent correct as a function of log groove width in millimeter at the fingerpad and fingerbase for both 200 and 50 g of force for the GR/OR task. Error bars represent ±1 standard error of the mean. The horizontal dashed line represents 75% correct performance. Each psychometric function has been fitted with a sigmoidal curve using Eq. 1
The results from the GAP task are shown in Fig. 4, percent correct as a function of the log of the groove width. As with the GR/OR task, increasing force appears to produce no increase in sensitivity at either of the two sites for the GAP task. A repeated-measures ANOVA confirmed what the results in Fig. 4 indicate: No significant difference between 50- and 200-g force conditions at either the fingerpad or fingerbase [F(1,5)=0.29, P=0.62; F(1,5)=0.30, P=0.61, respectively]. As expected, there was a significant effect of gap length at the fingerpad and fingerbase [F(5,25)=62.27, P<0.01; F(5,25)=56.90, P<0.01, respectively]. The data for the GAP task were fit with a sigmoidal function (Eq. 1), and thresholds calculated (Table 3). Again for this spatial measure, as with GR/OR measure, there is very little difference in the thresholds for 50 and 200-g force at either the fingerpad or fingerbase.

Percent correct as a function of log gap length in millimeter at the fingerpad and fingerbase for both 200 and 50 g of force for the GAP task. Error bars represent ±1 standard error of the mean. The horizontal dashed line represents 75% correct performance. Each psychometric function has been fitted with a sigmoidal curve using Eq. 1
The psychophysical results are consistent with the neurophysiological data. We found that an increase in force led to an improvement in performance on the SM/GV task and not the GR/OR and GAP tasks. This is what was predicted based on the neurophysiological evidence. Our results indicate force affects only those tasks that rely on an intensive code, and not those that rely on a spatial code.
Experiment 2
The results from an earlier study (Vega-Bermudez and Johnson 2004) showed that the amount of conformance increased with both increasing force and groove width. The results from Experiment 1 showed that SM/GV performance improved with increasing force and groove width. The issue addressed in Experiment 2 was whether SM/GV performance was a direct function of the amount of conformance. The fact that SM/GV performance is directly related to the manipulation of a spatial variable, groove width, could be the result of changes in conformance. The resulting changes in curvature may, in turn, produce changes in the rate of firing in the first-order afferent fibers, an intensive code.
In Experiment 2, we measured conformance with the same stimulus conditions used in the SM/GV task; specifically, we measured skin conformance for each groove width used in the SM/GV tasks at two levels of force (50 and 200 g). The measurements were taken at the fingerpad and fingerbase.
Method
Subjects
As in Experiment 1, the subjects were students at Indiana University who were paid employees of the laboratory (Table 1). Because these experiments were conducted over a long period of time, not all of the subjects from Experiment 1 were able to participate in Experiment 2. For the fingerbase, all five subjects who participated in the conformance measures also participated in both the SM/GV and GR/OR tasks at the fingerbase in Experiment 1. For the fingerpad of the six subjects who participated in the conformance measures, three had participated in the SM/GV task, and two had participated in the GR/OR task at the fingerpad in Experiment 1.
Stimuli
Conformance was measured with the grooves oriented in the proximal–distal orientation. For the conformance measurements, we developed a set of contactors to measure the depth of penetration of the skin into the grooves of the contactor. The contactors were identical to the ones used in SM/GV and GR/OR testing, with the exception that a hole was drilled down the center of the shaft and through the bottom of the contactor. The hole was in the center of the middle groove of each contactor. A fine wire was inserted through the center hole. As the skin pushed into the groove, it displaced the wire providing a measure of skin conformance (Gibson and Craig 2002).
Procedure
For each subject, conformance was measured two times in the proximal–distal orientation for the eight groove widths used in the SM/GV task. To obtain these measurements, the contactors were allowed to travel freely into the skin in the same manner as they did during testing. As the skin entered the groove, it displaced the wire. The amount of displacement was measured using a microscope with an eyepiece micrometer. This procedure was repeatable with an accuracy of 5 μm (Gibson and Craig 2002).
Results and discussion
The results from the conformance measurements at the fingerpad and fingerbase are shown in Fig. 5. A repeated-measures ANOVA was conducted to see what effect force had on conformance. As expected, there was a significant main effect of force and groove width at both the fingerpad and fingerbase [F(1,5)=28.65, F(5,25)=53.82, F(1,4)=249.16, and F(5,20)=82.64; P’s<0.01, respectively]. We can see in Fig. 5 that there is likely an interaction between force and groove width. This is apparent because as groove width increases, the slopes of the functions also increase. A repeated-measures ANOVA revealed that there is a significant interaction between force and groove width at both the fingerpad and fingerbase [F(5,25)=4.21 and F(5,20)=14.18; P’s<0.01, respectively]; as force increases, the amount of conformance increases disproportionately with increasing groove width. At very small groove widths there is very little difference in conformance between the two forces: As the groove width increases, the difference in conformance between the two forces also increases (Fig. 5).

Conformance of the skin in micrometer as a function of application force in grams at the fingerpad and fingerbase. Error bars represent ±1 standard error of the mean
To what extent can the changes in sensitivity due to force and groove width be accounted for by changes in conformance? To examine this question, we plotted percent correct for both the fingerpad and fingerbase as a function of conformance for the groove widths used in the SM/GV task. It should be noted that these numbers are based on the averages from all of the subjects for each condition. We then fit psychometric functions (Eq. 1) to the two resulting scatter plots (Fig. 6). For the fingerpad (top panel), conformance accounted for 99% of variance in predicting SM/GV performance. For the fingerbase (bottom panel), conformance accounted for 90% of the variance in predicting SM/GV performance.

Percent correct as a function of log conformance in micrometer at the fingerpad and fingerbase across 200 and 50 g of force for the SM/GV task. Each psychometric function has been fitted with a sigmoidal curve using Eq. 1
We next tried fitting all the SM/GV data with a single function, that is, the data from both sites. For these combined data, Fig. 7, the fit is still good, an R 2 value of 0.86, although slightly below the fits obtained for the individual sites. Sensitivity at the two sites is different, with the fingerbase being less sensitive than the fingerpad, particularly with 50-g of force: Conformance still accounts for 86% of the variance, which suggests the importance of this variable.

Percent correct as a function of log conformance in micrometer across the fingerpad and fingerbase as well as across 200 and 50 g of force for the SM/GV task. A psychometric function has been fitted with a sigmoidal curve using Eq. 1
The GR/OR results from Experiment 1 were also examined to determine the extent to which conformance might account for sensitivity in this task. In the GR/OR task, the contactors are presented in both the proximal–distal and lateral–medial orientations. Additional conformance measurements were made with the contactors used in the GR/OR task. These measurements were made in both the proximal–distal and lateral–medial orientations. These conformance measurements were averaged. Plotting performance as a function of the average conformance for the fingerpad and fingerbase separately resulted in reasonably high R 2 values, 0.66 and 0.86, respectively. This is not surprising given the close relationship between groove width and conformance. Combining the data from the two sites, which show substantial differences in spatial sensitivity, provides a more stringent test of the role of conformance. Here the R 2 value falls considerably to 0.44, about half the variance accounted for with the SM/GV task.
It is not surprising that the effect of force on discriminating between a smooth and grooved surface can be accounted for by conformance; what is more revealing is the finding that conformance rather than groove width appears to be the critical variable. This finding reinforces the point that the SM/GV task, unlike the GR/OR task, is based on intensity discrimination. Although performance for both tasks is a direct function of groove width, conformance appears to be the more critical variable with the intensive task. Also, in light of the neurophysiological data (LaMotte and Srinivasan 1987a, b), it is reasonable to suppose that conformance is a good measure of skin curvature with the types of contactors used in the present study. In turn, the firing rates for first-order afferent fibers are a direct function of skin curvature, indicating that performance on the SM/GV task is likely to be directly mediated by the firing rate in the peripheral afferent fibers.
To confirm that conformance rather than groove width is the critical variable in the SM/GV task, we performed a multiple regression analysis of the data using conformance, location, groove width, and force as the independent variables. The full model was able to account for a significant proportion of the variance (R 2=0.80; F=18.99, P<0.001). Of the four variables used in the model, conformance was the only significant coefficient (t=4.65, P<0.001), indicating that the other variables contributed little to the model. Next, to see exactly how much variance each of the variables account for, we performed a stepwise regression analysis. The first model used conformance as the only variable and was able to account for a significant proportion of the variance (R 2=0.74; F=62.38, P<0.001). The second model included both conformance and groove width as variables, but the additional variance accounted for was small, the R 2 increased from 0.74 to 0.79. Because groove width improves the predictability of the model, we wondered how much of the variance groove width would account for on its own. An analysis, in which we forced groove width as the only variable, revealed that it was able to account for a significant proportion of the variance, although considerably less than conformance (R 2=0.33; F=10.69, P<0.01). It seems that most of the variance that groove width accounts for is also accounted for by conformance. This analysis supports the conclusion that conformance is the critical variable in determining SM/GV performance.
General discussion
There are two major findings from the present study. First, changing force had no effect on two different measures of spatial sensitivity (GR/OR and GAP), but had a substantial effect on a measure that relies on the discrimination of differences in intensity. Second, conformance, as measured by the depth of skin entering the grooves, is a good predictor of performance on the SM/GV task across different forces, groove widths, and locations. For the GR/OR task conformance is not as good a predictor, particularly across locations.
In their study of spatial sensitivity, Vega-Bermudez and Johnson (2004) found that thresholds for individual subjects were correlated with biomechanical factors. They measured the amount of conformance on the fingerpad at groove widths of 1, 2, and 3 mm and also measured thresholds for the GR/OR task. From these values, they calculated the slope of the function-relating conformance to groove width. The result was that the greater the slope, the lower an individual subject’s threshold. The R 2 value was approximately 0.50. In the present study, the subjects on whom the conformance data were obtained were not the same group of subjects who were tested on the GR/OR task. We cannot, therefore, determine if individual thresholds in this study can be predicted by the slope of the conformance function. However, it is possible to use the Vega-Bermudez and Johnson results to see the extent to which conformance per se might be correlated with an individual’s spatial sensitivity. Using Vega-Bermudez and Johnson’s results, we calculated the extent to which conformance at the different groove widths is correlated with individuals’ thresholds. As in the present study, thresholds in the Vega-Bermudez and Johnson study were approximately 1 mm. The correlation between an individual subject’s threshold and the amount of conformance at 1 mm was small (R 2=0.01). At 2 and 3 mm groove widths, the R 2 values were 0.08 and 0.31, respectively. A tentative conclusion is that the amount of conformance, as measured by the depth of penetration of the skin into the grooves, is not a good predictor of an individual’s spatial sensitivity.
The results from the present study show that the amount of conformance can be used to predict SM/GV performance from a group of subjects. Additional work would be required to extend this work to predict performance for individual subjects. There have been a number of studies that have examined individual differences and spatial sensitivity (Goldreich and Kanics 2003; Stevens and Patterson 1995; Vega-Bermudez and Johnson 2001, 2004). To our knowledge, there are no studies of individual factors that might affect performance on the SM/GV task. To examine these factors one would want to test a large number of subjects on the SM/GV task, measure skin conformance with the same subjects, and see the extent to which the amount of conformance for an individual predicts their sensitivity. Information on age, handedness, sex, finger size, musical experience, and so forth would also be collected to see the extent to which these additional variables would improve the predictions of individual performance.
Force, conformance, and the SM/GV task
The SM/GV results provide a different picture from that seen with the GR/OR and GAP tasks. Here increasing force does improve discriminability. The fact that the thresholds at the fingerpad and fingerbase are more similar at 200 g than at 50 g suggests that there may be an upper limit to the effect that increasing force, and hence conformance, has on the SM/GV thresholds. In other studies we have examined SM/GV thresholds across additional locations, and found that testing different sites on the hand produced relatively small changes in threshold; however, when sites were tested on the arm (forearm and upperarm), the SM/GV thresholds increased considerably (Gibson and Craig 2005). One factor that might have led to the substantial increase in threshold is the size of the contactors that were used on the arm. To accommodate larger groove widths, the contactors were increased in size; however, the force was kept the same, 100 g. With the same force applied through a larger contactor, conformance was very likely to have been less on the arm than it had been on the test sites on the hand. Had conformance been kept constant when testing sites that differ in density of innervation as much as sites on the fingerpad and forearm differ, would the SM/GV threshold have remained constant across sites? Additional SM/GV and conformance measures at other sites such as the forearm would be necessary to answer this question; however, in some measurements we increased force from 100 to 400 g on the forearm, and found a 60% decrease in threshold. This increase in force would, one assumes, produce greater conformance. How well results from these and other less densely innervated sites might be fit with a single conformance function, such as was done in the current study, would also require additional measurements.
A situation in which conformance is unlikely to predict SM/GV sensitivity is one in which the orientation of the grooves on the skin is changed at the same site. A recent study (Gibson and Craig 2005) examined anisotropy, the effect of the orientation of the contactors, on the same three measures of tactile sensitivity used in the present study. Orientation had no significant effect on the SM/GV task. Conformance measures, however, showed that orientation did have a significant effect: Greater conformance was seen with the grooves aligned along the proximal–distal axis of the finger rather than across the fingerpad. This was the case for both the fingerpad and the fingerbase. There was a non-significant trend for the orientation that produced the greater conformance to also have greater sensitivity. At present, however, the fact that conformance can predict SM/GV sensitivity should not be extended to include differences in conformance produced by contactor orientation.
Might the differences in conformance resulting from orientation have an effect on GR/OR task? Could the difference in conformance produce a sufficient difference in intensity between the two orientations such that GR/OR could be performed on the basis of intensity rather than spatial cues? This seems unlikely. The greater conformance obtained with the grooves aligned along the finger did not produce enough of an increase in intensity to lead to greater discriminability in that orientation in the SM/GV task (Gibson and Craig 2005). If there is no improvement in discriminating between a smooth and grooved contactor in one orientation versus another, it seems unlikely one could discriminate between two grooved surfaces based on what appears to be such a small difference in intensity. Also, as noted previously, there is considerable evidence that the GR/OR task is done on the basis of spatial rather than intensive cues (Craig and Kisner 1998; Craig 1999; Craig and Lyle 2001; Gibson and Craig 2002, 2005; Johnson and Phillips 1981; Van Boven and Johnson 1994a, b).
The fact that increasing force lowers threshold for the SM/GV task has important implications for the interpretation of the GR/OR results. There was no effect on GR/OR sensitivity when force was increased from 50 to 200 g. This lack of effect could be interpreted as suggesting that the force manipulation produced such a small change in conformance that the neural activity was unaffected. The fact that SM/GV threshold dropped by as much as 62% shows that this was not the case. It is certain that increasing force leads to substantial increases in neural activity; however, this increase does not lead to a net improvement in performance with GR/OR or GAP tasks. In the spatial tasks, GR/OR and GAP, it is likely that groove width and not conformance drives performance, whereas the opposite is true for the intensive task, SM/GV.
References
Craig JC (1999) Grating orientation as a measure of tactile spatial acuity. Somatosens Mot Res 16:197–206
Craig JC, Kisner JM (1998) Factors affecting tactile spatial acuity. Somatosens Mot Res 15:29–45
Craig JC, Lyle KB (2001) A comparison of tactile spatial sensitivity on the palm and fingerpad. Percept Psychophys 63:337–347
Darian-Smith I, Kenins P (1980) Innervation density of mechanoreceptive fibers supplying glabrous skin of the monkey’s index finger. J Physiol 309:147–155
Essock EA, Krebs WK, Prather JR (1997) Superior sensitivity for tactile stimuli oriented proximally-distally on the finger: implications for mixed class 1 and class 2 anisotropies. J Exp Psychol Hum Percept Perform 23:515–527
Gibson GO, Craig JC (2002) Relative roles of spatial and intensive cues in the discrimination of spatial tactile stimuli. Percept Psychophys 64:1095–1107
Gibson GO, Craig JC (2005) Tactile spatial sensitivity and anisotropy. Percept Psychophys 67:1061–1079
Goldreich D, Kanics IM (2003) Tactile acuity is enhanced in blindness. J Neurosci 23:3439–3445
Johansson RS, Vallbo ÅB (1979) Tactile sensibility in the human hand: relative and absolute densities of four types of mechanoreceptive units in glabrous skin. J Physiol 286:283–300
Johansson RS, Vallbo ÅB (1983) Tactile sensory coding in the glabrous skin of the human hand. Trends Neurosci 6:27–32
Johansson RS, Landström U, Lundström R (1982) Sensitivity to edges of mechanoreceptive afferent units innervating the glabrous skin of the human hand. Brain Res 244:27–32
Johnson KO, Phillips JR (1981) Tactile spatial resolution: I. Two-point discrimination, gap detection, grating resolution, and letter recognition. J Neurophysiol 46:1177–1191
LaMotte RH, Srinivasan MA (1987a) Tactile discrimination of shape: responses of slowly adapting mechanoreceptive afferents to a step stroked across the monkey fingerpad. J Neurosci 7:1655–1671
LaMotte RH, Srinivasan MA (1987b) Tactile discrimination of shape: responses of rapidly adapting mechanoreceptive afferents to a step stroked across the monkey fingerpad. J Neurosci 7:1672–1681
Loomis JM (1985) Tactile recognition of raised characters: a parametric study. Bull Psychon Soc 23:18–20
Patel J, Essick GK, Kelly DG (1997) Utility of square-wave gratings to assess perioral spatial acuity. J Oral Maxillofac Surg 55:593–601
Phillips JR, Johnson KO (1981) Tactile spatial resolution: II. Neural representation of bars, edges, and gratings in monkey primary afferents. J Neurophysiol 46:1192–1203
Sathian K, Zangaladze A (1996) Tactile spatial acuity at the human fingertip and lip: bilateral symmetry and interdigit variability. Neurology 46:1464–1466
Smith AM, Gosselin G, Houde B (2002) Deployment of fingertip forces in tactile exploration. Exp Brain Res 147:209–218
Stevens JC, Choo KK (1996) Spatial acuity of the body surface over the life span. Somatosens Mot Res 13:153–166
Stevens JC, Patterson MQ (1995) Dimensions of spatial acuity in the touch sense: changes over the life span. Somatosens Mot Res 12:29–47
Stevens JC, Alvarez-Reeves M, Dipietro L, Mack GW, Green BG (2003) Decline of tactile acuity in aging: a study of body site, blood flow, and lifetime habits of smoking and physical activity. Somatosens Mot Res 20:271–279
Van Boven RW, Johnson KO (1994a) The limit of tactile spatial resolution in humans: grating orientation discrimination at the lip, tongue and finger. Neurology 44:2361–2366
Van Boven RW, Johnson KO (1994b) A psychophysical study of the mechanisms of sensory recovery following nerve injury in humans. Brain 117(Pt 1):149–167
Vega-Bermudez F, Johnson KO (1999) SA1 and RA receptive fields, response variability, and population responses mapped with a probe array. J Neurophysiol 81:2701–2710
Vega-Bermudez F, Johnson KO (2001) Differences in spatial acuity between digits. Neurology 56:1389–1391
Vega-Bermudez F, Johnson KO (2004) Fingertip skin conformance accounts, in part, for differences in tactile spatial acuity in young subjects, but not for the decline in spatial acuity with aging. Percept Psychophys 66:60–67
Werner G, Mountcastle VB (1968) Quantitative relations between mechanical stimuli to the skin and neural responses evoked by them. In: Kenshalo DR (ed) The skin senses. C.C. Thomas, Springfield, pp 112–137
Wheat HE, Goodwin AW (2000) Tactile discrimination of gaps by slowly adapting afferents: effects of population parameters and anisotropy in the fingerpad. J Neurophysiol 84:1430–1444
Woodward KL (1993) The relationship between skin compliance, age, gender, and tactile discriminative thresholds in humans. Somatosens Mot Res 10:63–67
Acknowledgments
This research was supported by the National Institutes of Health Grant No. DC 00095, National Institute on Deafness and Other Communication Disorders. We thank Roger Rhodes for his assistance in these experiments and Dwight Hector for his technical assistance in designing and building the apparatus used in making the conformance measurements. Correspondence concerning this article should be addressed to G.O. Gibson, Department of Psychology, Indiana University, Bloomington, IN 47405 (e-mail: gogibson@indiana.edu).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Gibson, G.O., Craig, J.C. The effect of force and conformance on tactile intensive and spatial sensitivity. Exp Brain Res 170, 172–181 (2006). https://doi.org/10.1007/s00221-005-0200-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-005-0200-1