
Abstract
We have examined the interaction among individual finger forces in tasks that required the production of the total force by a subset of fingers in a particular direction in the flexion–extension plane. Nine subjects produced fingertip forces in a prescribed direction with a maximum voluntary contraction (MVC) effort and held the peak force for two seconds. Six finger combinations were tested, four single-finger tasks—Index (I), Middle (M), Ring (R) and Little (L)—one two-digit task (IM), and one four-digit task (IMRL). The subjects were asked to generate the finger forces in two directions, 0° (perpendicular to the surface of the transducer) and 15° toward the palm. In all task conditions, there were two experimental sessions, with and without visual feedback on the task force vector. The main findings were:
-
1.
The target direction significantly affected the constant error (CE) but not the variable error (VE) while removal of the feedback resulted in an increase in VE.
-
2.
The direction of the forces produced by fingers that were not explicitly required to produce force (enslaved fingers) depended on the target direction.
-
3.
In multi-finger tasks, the individual fingers produced force in directions that could differ significantly from the target direction, while the resultant force pointed in the target direction.
There was a negative co-variation among the deviations of the directions of the individual finger forces from the target direction. If a finger force vector deviated from the target, another finger force vector was likely to deviate in the opposite direction. We conclude that a multi-finger synergy is involved in the control of the finger force direction.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
To manipulate hand-held objects—such as a glass, a utensil, or a tool—humans exert forces on them. For accurate manipulation, both the force magnitude and the force direction have to be specified and stabilized against possible internal and external perturbations. The control of force magnitude has been an object of vigorous research (Li et al. 1998a; Sharp and Newell 2000; Latash et al. 2002b; Shim et al. 2003) while the control of force direction has been addressed to a much lesser degree. We have been able to find only four papers dealing specifically with the control of finger force direction. All four are limited to the force exerted by the index finger. Valero-Cuevas et al. (1998) examined the muscle activity when subjects produced static forces in five directions (palmar, distal, lateral, dorsal, and medial). The patterns of muscle activation were subject-independent and the activity levels scaled with the force magnitude. Distribution of maximal index-fingertip force in all directions was also studied by Li et al. (2003).
Two studies addressed index finger force production in the flexion-extension plane. In a study by Milner and Dhaliwal (2002), subjects applied force in isometric conditions at the fingertip in eight equally spaced directions, encompassing 360°. The authors examined the patterns of activation of extrinsic and intrinsic finger muscles. The intrinsic muscles of the finger functioned as a single unit whose region of activation overlapped with that of the extrinsic flexor and extensor muscles. Yokogawa and Hara (2002) investigated the distribution patterns of the maximum index fingertip force in directions from 0 deg to 360 deg with 10-deg increments. Similar patterns were revealed across the subjects suggesting that the subjects’ index fingers had similar static characteristics, possibly defined by muscle properties.
We are unaware of any study addressing the control of fingertip force direction in multi-digit tasks. The present study has four main goals:
-
1.
to determine the accuracy and precision (quantified as constant and variable errors) of the force direction control in maximal voluntary contraction (MVC) tasks;
-
2.
to test the dependence of direction accuracy on target force direction;
-
3.
to explore the dependence of the direction of forces produced by fingers that are not required to produce force (enslaved forces; Li et al. 1998a, 1998b; Zatsiorsky et al. 1998, 2000) on the target direction; and
-
4.
to establish whether there is a multi-finger synergy stabilizing the direction of the total force.
With regard to the last goal, we have used a definition of a synergy as a co-variation of elemental variables (directions of individual finger forces in this study) that stabilized an important performance variable (direction of the total force). This is a logical extension of a series of studies that analyzed multi-digit synergies in pressing and prehension tasks with respect to such performance variables as total force and total moment of forces produced by a set of digits (Latash et al. 2001, 2002a; Shim et al. 2003; Zatsiorsky and Latash 2004).
Experimental
Methods
Nine male subjects (27±6 yrs, 75±9 kg, 1.79±0.1 m, hand length, fingertip to distal crease of the wrist with hand extended 19.1±1.3 cm, hand width 9.2±0.53 cm) participated voluntarily in this study. All the subjects were right-handed according to their hand use during eating and writing. Subjects had no previous history of neuropathy or trauma to the arm and hand. All subjects gave informed consent according to the procedures approved by the Office for Regulatory Compliance of The Pennsylvania State University.
Experimental setup
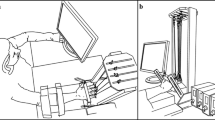
The experimental device consisted of three major parts: a large aluminum plate serving as the base, a pillar with a vertical slot to attach transducers, and a cylinder serving as the handle (Fig. 1). The pillar was mounted on the plate such that the surface of the sensors formed a 45° angle with the longitudinal axis of the forearm. The distance between the pillar and the cylinder could be adjusted to achieve a consistent finger configuration across the subjects.

Schematic drawing of experimental setup
Fingertip forces were measured in the horizontal plane by six-component force/torque sensors (Nano-17, ATI Industrial automation, Garner, NC, USA). The transducers were mounted on the vertical slot of the pillar, 3 cm apart (the distances were measured between the sensor centers). On the top of each transducer a tube-like thimble was placed to hold the tips of individual fingers. At the center of each thimble there was a small round hole to help subjects place the fingertip reproducibly. A thin rubber coating was put inside each thimble to decrease the pressure on the fingertip and facilitate the fingertip force production.
The output cables of the four sensors were connected to a customized box that split the cables into separate channels corresponding to individual signals and input the signals to two 32-channel 12-bit AD converters (PCI-6033E, National Instruments, Austin, TX, USA). The digital signals were processed using a computer (Gateway AMD800, North Sioux City, SD, USA). The sampling frequency was set at 50 Hz. The data were recorded by a customized program written in Labview 5.1 (National Instruments, Austin, TX, USA).
Test Procedure
Before the experiment, the subjects washed the hands with soap and warm water to normalize skin condition. The subjects sat in the chair facing the setup, with the right upper arm positioned at approximately 45° abduction in the frontal plane and 45° flexion in the sagittal plane. The forearm was supported and constrained by a half-tube-shaped brace with Velcro straps.
Before the test, the subjects were instructed to hold the cylindrical handle firmly while placing the tips of the fingers into the centers of the thimbles. The subjects were asked to produce a fingertip MVC force in a prescribed direction and hold the peak force for two seconds. Six finger combinations were tested, including four single-finger tasks—the force was generated by the Index (I), Middle (M), Ring (R) and Little (L) fingers, one two-digit task (IM) and one four-digit task (IMRL). In all tasks, all the finger forces were recorded, from the fingers that were instructed to produce force (master fingers) as well as from the remaining fingers that by instruction were not required to generate force (enslaved fingers). The subjects were instructed to keep all the fingers on the sensors. The subjects were asked to generate the maximal finger forces in a prescribed direction, 0° (perpendicular to the surface of the transducer) or 15° toward the palm. While the relative importance of generating the maximal force versus generating it exactly in the prescribed direction was not emphasized in the instruction, the subjects were informed about the goal of the research—control of force direction—and, according to our observations, were attentive to the force direction control.
There were two conditions. Under the first condition, visual feedback was provided to help the subjects point in the target directions. A polar coordinate grid with the origin in the center of the finger sensor(s), the target direction, and the resultant finger force vector were shown on-line on a monitor placed 0.5 m away from the subject. The feedback was provided only for the master finger forces. Under the second condition, the visual feedback on the actual forces was removed while the target direction was shown on the screen. Before each trial, the experimenter asked the subject to be ready. An auditory start signal was generated, and the subject was instructed to gradually increase the fingertip force until MVC and to maintain the force at that level for about 2 s. The total recording period was 5 s. Six trials were run for the following finger combinations, I, IM and IMRL. Three trials were run for M, R and L tasks. The intervals between the trials were always over one minute. For a given task, trials with visual feedback were always performed first, followed by the same task performed without the feedback. The sequence of finger combinations was randomized.
Data analysis
Finger force vectors were recorded in the horizontal plane. Sensors were placed in such a way that the x axis of the local reference frame was aligned horizontally and, therefore, vertical force (Fy) components were not taken into account in this study (Fig. 1).
Raw data were low-pass filtered with the fourth-order Butterworth filter with the cutoff frequency set at 5 Hz. Moving average values were calculated using a 100-ms wide window over the whole trial duration. Maximum window value was chosen and treated as MVC. The MVC was then averaged across trials for individual subjects for further analysis.
In motor-control literature (Schmidt and Lee 1999) the types of error commonly used are constant error (CE), which is an average deviation from the target, and variable error (VE), that equals the standard deviation from the average. In the present study, we used both CE and VE to characterize the performance.
Let φ i be one of the n observed angles and v i be the corresponding vector. Let x i and y i be the rectangular components of v i , then x i =v i cosφ i and y i =v i sinφ i . Let \( \ifmmode\expandafter\bar\else\expandafter\=\fi{x} = \frac{1} {n}{\sum\limits_1^n {v_{i} \cos \phi _{i} } } \) and \( \ifmmode\expandafter\bar\else\expandafter\=\fi{y} = \frac{1} {n}{\sum\limits_1^n {v_{i} \sin \phi _{i} } } \). The mean angle is then determined as:
Note that the mean angle \( \ifmmode\expandafter\bar\else\expandafter\=\fi{\phi } \) is calculated by vector methods, i.e. taking into account the force magnitude. The standard deviation (VE) was computed as a scalar \( VE = \sqrt[{}]{{\frac{{{\sum {{\left( {\phi _{i} - \ifmmode\expandafter\bar\else\expandafter\=\fi{\phi }} \right)}^{2} } }}} {{n - 1}}}} \). The CE and VE were computed for individual subjects across the trials and then for the entire group.
Linear coefficients of correlations were utilized to examine the relationships among the directions of the finger forces (the circular coefficients of correlation are insensitive to the sign of the correlation and because of that are not very informative). To compare the performance results in various tasks, e.g. at the different directions of target forces, a non-parametric Wilcoxon’s signed-rank (WSR) test was used. One-way ANOVA with the factor Rank (3 levels) with Tukey’s pair-wise comparisons was also applied to compare CEs among different finger ranks (see the section on enslaved finger forces in “Results”). The level of significance was set at P<0.05.
Results
An example of the experimental recordings is presented in Fig. 2 for a representative subject who was instructed to produce MVC in the direction orthogonal to the force sensors (0°) with all four fingers pressing together (IMRL test). In the example, the angle between the MVC vector and the target direction was about 1.8° while the magnitude of force exerted precisely in the target direction was only 0.65 of the MVC (the ratio is calculated by dividing the magnitude of the force in the target direction by the MVC magnitude).

An example of the force and direction changes during a typical trial (IMRL, 0° target, with feedback) by a representative subject. MVC shows the force magnitude and the force vector angle when the maximal force was achieved
In all 12 tasks forces at 0° were larger than that at 15° (however, significantly larger values were observed in only 8 of 12 tasks, P<0.05, WSR test).
Constant and variable errors of the task force direction
This section deals with the direction of the total force produced by the fingers that were explicitly involved in each particular task (master fingers). We will address this force as a “task force”. The forces exerted by other (slave) fingers will be addressed later in the text.
Constant error (CE)
The data on the average deviation of the finger force from the target (CE) are presented in Table 1. For the 0° target direction with visual feedback, the ring and little finger forces showed significant deviations from the target (CE=−1.29° for the ring finger and CE=−2.94° for the little finger, P<0.05). For the 15° target direction, the ring finger force also showed significant off-target deviation when no visual feedback was available (CE=−8.41°, P<0.05). For the 15° target with visual feedback, none of the finger forces matched the target well (P<0.05), and in all cases the fingers exerted forces at angles that were under 15° (Fig. 3). No significant changes in CE after removing the feedback were observed; magnitude of CE increased in nine cases out of twelve and decreased in the remaining three cases. Note that significant CE deviations from the target are a symptom of persistence of force deviation in only one direction, to the left or to the right of the target. If the forces deviated equally in the opposite directions, the CE would be close to zero at all magnitudes of the force deviation.

Finger force vectors for the six tasks, 15° target, with visual feedback. Group averages are shown. The following force magnitudes and CEs have been observed: I-task 61.8 N, −2.66° ; M-task 61.4 N, −4° ; R-task 37 N, −6.3° ; L- task 26.5 N, −9.1° ; IM-task 91.6 N, −1.6° ; IMRL-task 156.3 N, −2.6°. (I – index finger, M – middle finger, R – ring finger, and L – little finger)
Variable error (VE)
The variable error is a measure of the reproducibility of performance. Removal of feedback resulted in an increase in VE in 11 of 12 cases (P<0.05, WSR test; Table 1). The only exception was the ring finger force at 15° target. VE of I, IM and IMRL all showed significant changes after removal of the visual feedback (P<0.05).
Effects of target direction
There was a significant effect of target direction on CE; the CEs were larger for the 15° task (the average data are presented in Table 1; the results of the statistical analysis are in Table 2). VEs were not significantly affected by the target direction in most of the cases except the IM tasks with/without feedback (P<0.05). It suggests that as a rule the target direction significantly affects CEs but not VEs.
Enslaved finger forces
The enslaving effect was always observed: the fingers that were not required by instruction to produce force still generated it. The direction of the enslaved finger forces depended on the target direction: the individual enslaved forces significantly deviated from the target direction in only 13 of 48 cases (27%), Fig. 4; their resultant force deviated significantly from the targets in only three cases (R, L tasks at 0° target with feedback and I task at 15° target without feedback). As compared with the instructed (master) fingers, the enslaved fingers showed a smaller tendency to direct forces persistently either to the left or to the right of the target, hence their CEs were relatively small and the systematic deviations were not significant. The level of “accuracy” of the enslaved forces depended on the “distance” between the fingers (Fig. 5; note that in the figures the angular values were treated as scalars, i.e. neglecting the force magnitude). To quantify the “distance” we assigned rank 1 to the pairs of neighboring fingers, e.g. to the I and M fingers or the R and L fingers. Rank 2 was assigned to the fingers that are separated from each other by two inter-finger intervals, such as the I and the R finger. Rank 3 was assigned to the I-L finger pair. On average, the further the enslaved finger was away from the master finger the larger the deviation of the enslaved force from the target direction.

Finger force vectors recorded in I-tasks at 0° and 15°, feedback. The force polygon is obtained by adding tail-to-head the individual finger forces. Group averages are shown

The dependence of the CE of the enslaved forces on the rank of the “distance” of the enslaved finger from the master finger. Group means and standard errors of the means are shown. The means and the standard errors were computed for the angular values treated as scalars, i.e. without taking into account the force magnitude; * indicates a statistically significant difference (one-way ANOVA, Tukey’s pairwise comparisons, P<0.05)
Multi-finger tasks
The force vectors in the IM task are shown in Fig. 6. Note that while the IM vector points almost exactly at the target the two contributing force vectors, I and M, point in dissimilar directions; vector M to the left of the target and vector I to the right of it. In general, the CE and VE were smaller for the task forces than for the individual master finger forces (Table 3).

Group average force vectors with SDs, for the IM-task, at 0° target, with visual feedback
When the resultant finger force points in the target direction, there are many possible combinations of individual finger force vectors by which the task can be implemented. All the digits can point in a similar direction or they can point in different directions such that their resultant force points in the desired direction. It follows from the experimental data that the second option prevails: individual finger force vectors do not point, as a rule, in the target direction while the resultant force is closer to it. On the whole, the CE and VE were smaller for the task forces than for the individual master finger forces (Table 3). In all eight tasks—IM and IMRL finger combinations at two targets, with and without feedback—the CE of the task force was smaller than the CE of at least one individual finger force; in five tasks of eight it was smaller than the CE of any finger force. As an example, consider an IMRL task (with feedback, target 0°), Fig. 7.

Finger forces in an IMRL task to the 0° target with visual feedback. The force polygon is obtained by adding tail-to-head the individual finger forces. Group average data are shown
To further explore the interaction among digits in multi-finger tasks, the variability of the force direction was analyzed. Here we use variance as an index of variability. For both two-finger (IM) and four-finger (IMRL) tasks the variability of task force was much lower compared with the variability of individual digit forces (Fig. 8). For instance, in the IM task (target 0° with visual feedback) the variances were 4.13 deg2 and 2.01 deg2 for the I and M finger forces, respectively, while it was only 0.5 deg2 for the IM task force (resultant force).

Force direction variance (deg2) in the multi-finger tasks with visual feedback. Group average data are shown: (a) IMRL task; (b) IM task
In the motor control literature, to test whether the individual variables compensate for each other, the sum of the variances of the elementary variables is commonly compared with the variance of the sum (Li et al. 1998b; Latash et al. 2002b). According to the Bienaimé Equality theorem for the mutually independent and integrable random variables; the sum of the variances is equal to the variance of the sum (Loevè 1955, p. 234). If the elementary variables compensate for each other deviations (co-vary negatively) the variance of the sum is smaller than the sum of the variances. This technique was proven to be useful to analyze the magnitudes of the finger forces (Latash et al. 2002b). However, the method is not applicable for analysis of finger force direction. The direction of the resultant force vector depends not only on the directions of the contributing forces but also on their magnitudes. For instance, if one force vector points at –10° while the second vector points at 10°, this does not mean that the resultant force vector points at zero degree. When the vectors are of different magnitude, e.g. 100 N and 1 N, the direction of the resultant force will be quite far from the “average” value (the force vector directions are said to be not integrable).
To establish whether the individual force vector deviations compensated for each other (i.e. if one force vector points to the left of the target, another force vector tends to points to the right of it), inter-correlations of the individual force vector directions were calculated. As already mentioned, the circular coefficients of correlation do not distinguish properly between positive and negative correlations (Batschelet 1981) and cannot be used to explore inter-compensation among the variables. Because of that, linear correlations were used to examine the existence of compensation in force direction. There was always at least one negative correlation coefficient among digits, which confirms the compensation in force direction production among digits. For example, in the IMRL task with the target at 0° and visual feedback, the correlation between the index and middle finger force directions was –0.456 (Table 4), which indicated a tendency to opposite changes in the finger force directions. In all IM tasks the correlation between the directions of the I and M was always negative; for instance at a 0° target and visual feedback the coefficient of correlation was –0.726 (statistically significant).
Discussion
Because this study is the first to address force direction control in multi-finger tasks, our opportunity for comparing the present data with the published results is limited. The following discussion addresses: control of force direction in single-finger tasks; direction of enslaved finger forces; and synergies in the stabilization of multi-finger force direction.
Control of force direction in single-finger tasks
As a rule, the subjects did not exert maximal force precisely in the target direction and there was a systematic offset in the force direction when the target was set at 15°. The target direction significantly affected the constant error but not the variable error in the task force direction.
Direction of a force produced by the endpoint of a multi-joint effector depends on the torques in individual joints. The change of the joint torques results in changing both the magnitude and direction of the endpoint force. Hence, the natural sequence of events is: muscle activation→joint torques→endpoint force, its direction and magnitude. The inverse analysis (endpoint force→joint torques) is, however, much more simple to perform. For a given kinematic chain configuration (a set of finger joint angles), an endpoint force defines each and every one joint torque (Fig. 9). The opposite is not true; a single joint torque does not define the endpoint force. Only a combination of torques in all joints of the chain does this (for the biomechanical analysis of the endpoint force production in multi-link kinematics chains see Zatsiorsky 2002, chap 2). For a planar three-link chain (Fig. 9), each individually applied joint torque causes the end effector to apply a force to the environment along the line passing through the other two joints (Zatsiorsky 2002, p.153). Hence, if joint torque in one of the joints changes, both the endpoint force magnitude and direction are expected to change.

This is a planar three-link chain modeling a finger in the flexion–extension plane. The chain is at equilibrium, the weight of the segments is neglected. MCP, PIP and DIP are the metacarpophalangeal, proximal interphalangeal and distal interphalangeal joints, respectively. Symbols l 1 , l 2 and l 3 designate the length of the proximal, middle and distal phalanx,respectively. F is an endpoint force. θ2 and θ3arethe joint angles (external). The abscissa axis is along the proximal phalanx; in this finger configuration θ1=0. The following equations are valid: Tmcp=Fdmcp, Tpip=Fdpip and Tdip=Fddip, where T stands for a joint torque and d is a moment arm of force F with respect to a joint center (F is a force magnitude). The moment arms of force F are: dmcp=Tmcp/F, dpip=Tpip/F, ddip=Tdip/F (the moment arms characterize the endpoint force direction). To define the direction and magnitude of the endpoint force the performer must specify the values of Tmcp, Tpip and Tdip such that the above constraints are satisfied
If the force direction remains constant, the force magnitude is stabilized by the proportional increase/decrease of the joint torques (ibid). In agreement with this explanation, modulating fingertip force magnitude across the voluntary range does not change a stable coordination pattern, i.e. the number of contributing muscles and their relative levels of activity (Valero-Cuevas 2000). Instead, changing the force magnitude is achieved by scaling the magnitude of a stable coordination pattern of muscle activity.
If the magnitude of a vector of joint torques (its Eucledian norm) is constant, the tips of the finger force vectors in diverse directions form an ellipse (Valero-Cuevas 1997; Zatsiorsky 2002). Experimental evidence supports this theory: the distribution pattern of the maximal index finger force in all directions from 0 deg to 360 deg is ellipse-like and is the same among subjects (Yokogawa and Hara 2002). Because the maximal force directed at 0 deg is larger than the maximal force directed at 15 deg, the systematic offset in the direction of the finger forces at 15 deg can be explained by the tendency to produce maximal force along the major axis of the force ellipse.
Enslaved finger forces
The direction of the enslaved finger forces depended on the direction of the target and hence on the direction of the force exerted by the master fingers, the task force (Table 3). According to the basic mechanics at a given finger configuration the fingertip force vector is controlled by a unique combination of the joint torques (Zatsiorsky 2002, chap 2). At the different target directions, the torques at the individual joints are different. The phenomenon of enslaving was described in the literature for the fingertip forces (Li et al. 1998a, 1998b). The dependence of the enslaved force direction on the direction of the master finger force suggests that enslaving is joint-torque-specific. Consider a case when the finger Jacobians of the master and enslave finger are similar and the master finger generates an endpoint force F in the direction θ (joint torques are T1, T2, T3). For the enslaved finger, generating a force kF in the same direction θ would require proportional change of the joint torques to kT1, kT2, and kT3,where k is a scalar. The individual enslaved forces, however, did not point in the same direction. A possible reason for that may be the different angular configurations, and hence different Jacobians, of the individual fingers —the fingertips of the all four fingers were aligned along the vertical line while the lengths of the digit segments are different. As a result, in the experimental setup the joint angles of individual fingers were slightly different. The different angular configurations formed different Jacobian matrices and could result in different orientation of the force ellipses. The differences among orientations of the force ellipse, or equivalently the directions of the major axes, may play a role in the production of the enslaved forces in dissimilar directions.
In single-finger tasks, enslaved finger force showed larger deviations from the target force (or from the task force) for fingers that were farther away from the master finger. In an earlier study, the magnitude of enslaving has been shown to be larger for fingers adjacent to the master finger than for “remote” slave fingers (Zatsiorsky et al. 2000). This similarity suggests that finger proximity is an important factor defining both slave finger magnitude and direction. It may be related to larger overlaps between cortical motor areas representing individual fingers for adjacent finger pairs (Schieber 1999, 2001).
Multi-finger synergies stabilizing force direction
With the resultant force pointing in the target direction or close to it, individual fingers could point in different directions. This is possible if the individual finger forces compensate for inaccuracies of each other. Exactly this pattern of finger behavior was observed in this study. The existence of negative linear correlation among deviations of digit forces from the target direction (Fig. 7 and Table 4) supports the existence of such an inter-finger compensation in the production of the force direction.
The existence of synergies in multi-finger force production is well documented and revealed in both pressing and grasping tasks (Li et al. 1998a, 1998b; Latash et al. 2001, 2002a, 2002b ). In the four-finger MVC pressing tasks it was found that the variance of the total maximal force output was smaller than the sum of variances of the maximal individual finger forces (Li et al. 1998a, 1998b). The reduction of the force variance at the multi-finger level suggested the existence of an inter-compensation among individual digits also confirmed in a series of further studies (Latash et al. 2001, 2002a, 2002b). Santello and Soechting (2000) examined the control of five-digit grasping by measuring gripping forces when subjects lifted and held a handle. A consistent temporal synergy was observed: the digits exerted normal forces in phase with each other. A more recent study has shown stabilization of an unconstrained hand-held object by co-variation of a subset of elemental variables (Shim et al. 2003). However, all these studies dealt with stabilization of the magnitudes of the finger forces.
In the current experiments we observed that individual finger force vectors co-varied to (relatively) preserve a particular direction of the total force. This finding strongly suggests existence of multi-finger synergies whose purpose is to stabilize a certain total force direction. The magnitude-stabilizing synergies and direction-stabilizing synergies must be closely interrelated since, as mentioned earlier, the direction of the total force vector depends on both directions and magnitudes of individual finger forces. To merge the two types of synergies would be one of the goals of future studies.
In future, we would also like to overcome some of the apparent limitations of the current study. First, we investigated only maximal force production, and some of the regularities may be related to a “ceiling effect”. Second, the thumb was not tested while its action may be an important factor in defining multi-digit synergies (e.g. Zatsiorsky et al. 2003; Shim et al. 2003). Third, in most everyday tasks, the control of force needs to be accompanied by the control of the moment of forces exerted on a hand-held object. The importance of the moment constraint has been emphasized in earlier studies (Shim et al. 2003; Zatsiorsky and Latash 2004), and one could expect that this constraint would also affect synergies that stabilize the direction of the total force.
References
Batschelet E (1981) Circular statistics in biology. Academic Press, New York
Latash M, Scholz J, Danion F, Schöner G (2002b) Finger coordination during discrete and oscillatory force production tasks. Exp Brain Res 146:419–432
Latash ML, Scholz JP, Danion F, Schöner G (2001) Structure of motor variability in marginally redundant multifinger force production tasks. Exp Brain Res 141:153–165
Latash ML, Scholz JP, Schöner G (2002a) Motor control strategies revealed in the structure of motor variability. Exerc Sport Sci Rev 30:26–31
Li ZM, Latash ML, Newell KM, Zatsiorsky VM (1998a) Motor redundancy during maximal voluntary contraction in four-finger tasks. Exp Brain Res 122:71–78
Li ZM, Latash ML, Zatsiorsky VM (1998b) Force sharing among fingers as a model of the redundancy problem. Exp Brain Res 119:276–286
Li Z-M, Pfaeffle HJ, Sotereanos DG, Goitz RJ, Woo SL-Y (2003) Multi-directional strength and force envelope of the index finger. Clin Biomech 18:908–915
Loevè M (1955) Probability theory. Van Nostrand, Princeton, NJ
Milner TE, Dhaliwal SS (2002) Activation of intrinsic and extrinsic finger muscles in relation to the fingertip force vector. Exp Brain Res 146:197-204
Santello M, Soechting JF (2000) Force synergies for multifingered grasping. Exp Brain Res 133:457–467
Schieber MH (1999) Somatotopic gradients in the distributed organization of the human primary motor cortex hand area: evidence from small infarcts. Exp Brain Res 128:139–148
Schieber MH (2001) Constraints on somatotopic organization in the primary motor cortex. J Neurophysiol 86:2125–2143
Schmidt RA, Lee TD (1999) Methodology for studying motor performance. In: Motor control and learning: A behavioral emphasis. Human Kinetics, Champaign, IL
Sharp WE, Newell KM (2000) Coordination of grip configurations as a function of force output. J Mot Behav 32:73–82
Shim J, Latash M, Zatsiorsky V (2003) Prehension synergies: trial-to-trial variability and hierarchical organization of stable performance. Exp Brain Res 152: 173–184
Valero-Cuevas FJ (1997) Muscle coordination of the human index finger. In: Ph.D. Thesis, Stanford University, Stanford
Valero-Cuevas FJ (2000) Predictive modulation of muscle coordination pattern magnitude scales fingertip force magnitude over the voluntary range. J Neurophysiol 83:1469–1479
Valero-Cuevas FJ, Zajac FE, Burgar CG (1998) Large index-fingertip forces are produced by subject-independent patterns of muscle excitation. J Biomech 31:693–703
Yokogawa R, Hara K (2002) Measurement of distribution of maximum index-fingertip force in all directions at fingertip in flexion/extension plane. J Biomech Eng 124:302–307
Zatsiorsky V, Latash M (2004) Prehension synergies. Exerc Sport Sci Rev 32:75–80
Zatsiorsky VM (2002) Kinetics of human motion. Human Kinetics, Champaign, Il
Zatsiorsky VM, Gao F, Latash ML (2003) Finger force vectors in multi-finger prehension. J Biomech 36:1745–1749
Zatsiorsky VM, Li ZM, Latash ML (1998) Coordinated force production in multi-finger tasks: finger interaction and neural network modeling. Biol Cybern 79:139–150
Zatsiorsky VM, Li ZM, Latash ML (2000) Enslaving effects in multi-finger force production. Exp Brain Res 131:187–195
Acknowledgments
Preparation of this paper was supported in part by NIH grants AR-048563, AG-018751, and NS-35032. The authors are grateful to Zbigniew Waskiewicz for his help in conducting the experiments and to Michelle L. Olson for her help in proofreading the manuscript.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Gao, F., Latash, M.L. & Zatsiorsky, V.M. Control of finger force direction in the flexion-extension plane. Exp Brain Res 161, 307–315 (2005). https://doi.org/10.1007/s00221-004-2074-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-004-2074-z