
Abstract
Positron emission tomography (PET) was used to examine the neural substrate underlying self-initiated versus externally triggered synchronized movements. Seven healthy subjects performed synchronized right index finger and foot movements in two conditions: either by setting them going at their own pace (self-initiated condition) or by reacting to randomly dispensed auditory signals (externally triggered condition). In addition, subjects either self-initiated or performed in reaction to an audible tone a sequence of finger and foot movements. We hypothesized that cerebellar activity would reflect the behavioural difference observed when hand and foot are self-initiated synchronously compared to when these movements are externally triggered. Consistent with early observations by one of us (Paillard 1948, Année Psychologique, pp 28–47), subjects exhibited a precession of finger initiation over foot dorsi-flexion in the externally triggered condition, and a precession of foot dorsi-flexion over finger onset in the self-initiated condition. In addition to the cortical areas already described in the literature as differently activated in self-initiated and externally triggered movements, we found, according to the research hypothesis, a prominent activation of the left postero-lateral hemi-cerebellum in self-initiated synchronized movements when compared to the externally triggered movements. No cerebellar activity was found for self-initiated sequence of hand-foot movements when compared to externally triggered sequence of hand and foot movements. We suggest that this cerebellar activity could be related to some motor timing processes specifically required by the self-initiated synchronized movements.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
It is well established that movement can be triggered by external stimuli or self-initiated by subjects (Goldberg 1985). The latter is assumed to involve an “image of goal achievement” in terms of expected sensory consequences of the planned movement. Single cells recording studies in primates have shown a functional distinction between the medial and lateral motor areas 6, in which the medial portion (supplementary motor area, SMA) is preferentially activated by internally generated movements, whereas the lateral premotor cortex (PMC) is activated in externally triggered movements (Mushiake et al. 1991). In humans, however, evidence from functional brain imaging studies is not so clear. Preferential involvement of the SMA in self-initiated movements has been suggested based on results from several human electroencephalographic and neuroimaging studies (Jahanshahi et al. 1995; Larsson et al. 1996; Wessel et al. 1997; Deiber et al. 1999; Jenkins et al. 2000; Thut et al. 2000; Weeks et al. 2001). These studies provide converging evidence that, in healthy humans, internally driven simple movements are principally mediated by components of the medial premotor area. On the other hand, lateral premotor structures failed to be activated in externally triggered movements in these neuroimaging studies.
The task we propose to investigate requires the simultaneous execution of two distant limb movements (index finger and foot). As first described by Paillard (1948), when a subject performs the two movements simultaneously there is always a short delay between the two movements despite the fact that subjects report simultaneous movement onsets. When subjects respond simultaneously to an external signal, the author found a precession of the finger over the heel, whereas in the self-initiated situation, the precession was inverted whereby the heel preceded the finger movement initiation. Paillard (1990) suggested that, in the reactive mode, finger precession reflects the difference in conduction time of the efferent pathways, as if the two motor commands are simultaneously released through a common triggering signal in the motor cortex. In contrast, the precession in milliseconds of the heel over the finger systematically observed in control subjects in the self-initiated condition led Paillard (1990) to suggest that the timing of the reafferent information could be evaluated and compared at the cerebellar level, a structure known to intervene as a timing controller (Ivry et al. 1988). Further testing (Bard et al. 1992) indicated that a patient deprived of limbs’ kinaesthetic information never showed a precession of the heel in the self-initiated mode, thus asserting the contribution of reafferent information to the timing of motor commands. Hence, simultaneity of sensory-motor events could be evaluated at the cerebellar level based on kinaesthetic reafferent information from the moving limbs.
The present study addresses this issue using a similar protocol in which subjects moved two distant limbs (finger and foot), thus introducing a large difference in motor and sensory conduction time, and requiring appropriate sequencing of motor commands to achieve synchronous movements. The primary aim of this positron emission tomography (PET) study was to evaluate the neural circuitry underlying the observed behavioural differences between self-initiated and externally triggered synchronized hand–foot movements. We hypothesized that cerebellar activity would reflect the behavioural difference observed when hand and foot are self-initiated synchronously.
Methods
Subjects
Seven healthy subjects (two men and five women) participated on a voluntary basis in the study. Their mean age was 50 years (range 39–62 years). The PET Working and Ethics Committee of the Montreal Neurological Institute approved the protocol. All subjects gave their written informed consent for the study.
Tasks
Subjects placed their right index finger and right first metatarsal head on electrical contact switches while lying on their back with their legs slightly elevated. Electrical contact switches allowed immediate rupture of the analogue signal through index finger extension or ankle dorsi-flexion. These two signals were collected at 500 Hz (12-bit A/D conversion). The position of the legs and arm allowed all movement onsets to be controlled visually by the experimenter.
Subjects performed two experimental motor tasks and three control conditions. In the first self-initiated condition (SI), subjects were asked to simultaneously self-initiate right index finger extension and right ankle dorsi-flexion. Each ankle movement produced an audible tone. Subjects were instructed to perform the task at their own irregular pace and could perform the number of movements they wanted. This condition was repeated three times.
In the second externally triggered condition (ET), subjects were required to react as quickly as possible to an auditory signal by producing simultaneous extension of their right index finger and dorsi-flexion of their right ankle. The recorded sequence of sounds generated by the SI condition was played back for the ET condition. Hence, the rate of movement in the ET was matched to that generated in the SI task. This condition was also repeated three times.
Three other conditions were used as control. These conditions were repeated only twice due to the maximal radioactive dosage (120 mCi) permitted using the bolus H2 15O methodology (see PET Data Acquisition section). In the first control condition (C), subjects were asked to listen to the auditory signals without moving. In the second control condition (SSI: sequential self-initiated condition), subjects were asked to self-initiate right index finger extension followed by right ankle dorsi-flexion (finger movement first). Subjects thus self-initiated a sequence of finger and foot movements. Each ankle movement produced an audible tone. Subjects were instructed to perform the task at their own irregular pace and could perform the number of movements they wanted. In the third control condition (SET, sequential externally triggered condition), subjects were required to react as quickly as possible to an auditory signal by producing an extension of their right index followed by a dorsi-flexion of their right ankle. Hence, in this condition, subjects performed a sequence finger and foot movements triggered by the audible tone. Thus, the required timing of the hand and foot movements was similar for the SSI and SET movements. The recorded sequence of sounds generated by the SSI condition was played back for the SET condition. Accordingly, the rate of movement in the SET was matched to that generated in the SSI task.
The order of presentation of the conditions was pseudorandomized across subjects, with the constraint that the self-initiated conditions had to be performed before the externally triggered conditions due to the yoked protocol. Externally triggered conditions were always interleaved with at least one self-initiated condition. Each condition period lasted 60 s and was followed by an inter-scan rest period of 10 min.
PET data acquisition
PET scans were obtained with a CTI/Siemens HR+ system, which produced 63 image slices at an intrinsic resolution 4.2×4.2×4.0 mm. The relative distribution of cerebral blood flow (CBF) was measured in the baseline and activated condition with the bolus H2 15O methodology (Raichle et al. 1983), without arterial sampling (Fox and Raichle 1984). Subjects received approximately 10 mCi of radioactivity per scan, and thus each subject received approximately 120 mCi during the entire experiment. For each subject, a high-resolution magnetic resonance imaging (MRI) study was also performed using a Philips Gyroscan 1.5T with a T1-weighted fast-field echo sequence giving 160 sagittal images with 1 mm3 voxels and a TR of 19 ms, a TE of 10 ms and a flip angle of 30.
PET data analysis
The MRI images were re-sliced to be co-registered with the PET data (Evans et al. 1991). An orthogonal coordinate frame was then established, based on the anterior–posterior commissure line as defined in the MRI volume (Evans et al. 1992). These coordinates were used to apply a trilinear re-sampling of each pair of MRI and PET data sets into a standardized stereotaxic coordinate system (Talairach and Tournoux 1988). To overcome residual anatomical variability persisting after stereotaxic standardization, PET images were reconstructed with a 14-mm Hanning filter and normalized for global CBF and averaged across subjects within each scanning condition. The mean state-dependent change (CBF) image volume was obtained (Fox et al. 1985) and converted to a t-statistic volume by dividing each voxel by the mean standard deviation in normalized CBF for all intra-cerebral voxels (Worsley et al. 1992).
Individual MRI images were subjected to the same averaging procedure, so that composite stereotaxic image volumes, sampled at approximately 1.5 mm in each dimension, were obtained for both t-statistic and MRI volumes. Anatomical and functional images were merged to allow direct localization on the MRI images of t-statistic peaks identified by an automatic peak-detection algorithm.
PET scan data were averaged for each condition for all subjects and were then averaged across subjects for these conditions. The significance of a given CBF activation was assessed by application of an intensity threshold to the t-statistic images (Worsley et al. 1992). This threshold, based on a 3-D Gaussian random field theory, predicts the likelihood of obtaining a false positive in an extended 3-D field. For an exploratory search involving all peaks within the grey matter volume of 600 cm3, the threshold for reporting a peak as significant was set at t=4.2 according to the method described by Worsley et al. (1996). Correcting for multiple comparisons, a t-value of 4.2 corresponds to an uncorrected probability of P<0.0004 (two-tailed) and yields a false positive rate of only 0.07 in 218 resolution elements (each of which has dimensions 14×14×14 mm), which approximates the volume of grey matter scanned. The threshold for peaks located in regions for which a priori hypotheses had been formulated was set at 3.5, which yields a false positive rate of only 0.58 in 200 resolution elements (Owen et al. 1998). Based on the results of Deiber et al. (1999), Jenkins et al. (2000) and Weeks et al. (2001), structures with a priori hypothesis included SMA, pre-SMA, cingulated motor areas, dorsolateral prefrontal cortex (DLPFC), parietal cortex, and lateral premotor cortex. The cerebellum was also included in the structures with a priori hypothesis based on the previous behavioural literature concerning our task (Paillard 1948, 1990; Bard et al., 1992) and on the identified role of the cerebellum to evaluate timing in different tasks (Ivry et al. 1988; Jueptner et al. 1996).
SI and ET conditions and SSI and SET conditions were compared one relative to the other using a t-statistic test. These comparisons gave positive and negative results that yielded significant results reported in this article. Results are reported at a threshold of t>3.50 for cerebral structures with an a priori hypothesis and t>4.2 for structures without an a priori hypothesis.
Localization of regions
The “Atlas of the Human Brain” by Talairach and Tournoux (1988) was used to identify the localization of the different cerebral structures that showed changes in regional CBF (rCBF). However, the identification of cerebral structures activated within the premotor medial wall was based on nomenclature and definitions by Picard and Strick (1996), whereas activity within the cerebellum was reported according to the “Atlas of the human cerebellum” by Schmahmann et al. (2000).
Results
Behavioural data
Figure 1 presents the mean delays (±SEM) observed between the finger and foot movements in both SI and ET tasks. Positive delays mean that the finger moved before the foot. A t-test for dependent samples showed a significant difference between the two conditions (t=3.17, P=0.019), whereby the foot moved before the finger (−31.2 ms) in the SI condition and the finger moved before the foot (9.2 ms) in the ET condition.

Means and standard error of delays between finger–foot synchronization in both self-initiated and externally triggered motor conditions. Positive delays indicate that the finger moved before the foot
Subjects performed a mean of 13 (SD=3) movements in the SI condition. This represents a movement frequency of 0.22 Hz or approximately one movement per 4 to 5 s. Because of the yoked protocol used in this study, subjects performed the exact same number of movements in both SI and ET conditions. In the ET condition, subjects showed a mean reaction time of 229.8 ms (SD=44.5 ms). No subjects moved either their finger or foot in the control condition.
PET scan data
Synchronized movements
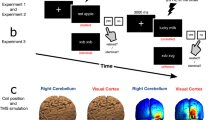
Table 1 presents the anatomical structures that showed significant rCBF changes in self-initiated versus externally triggered movements (SI versus ET). In the left cerebral hemisphere, the superior PMC (Fig. 2) showed significant changes in rCBF, whereas in the right cerebral hemisphere, the pre-SMA (Fig. 2), dorsolateral prefrontal cortex (Brodmann area 9) (Fig. 2) and the parietal cortex (Brodmann area 40) showed significant changes in rCBF. The cerebellum showed activation only in the left hemi-cerebellum (Fig. 2), particularly in lobules VI and VIIB of the posterior cerebellum.

Colour-coded statistical parametric maps of A right pre-supplementary motor area (Pre-SMA) and left superior lateral premotor (PM) cortex, B right dorsolateral prefrontal cortex (DLPFC) and C left cerebellum showing preferential activation in self-initiated condition over externally triggered condition
No anatomical structures showed significant rCBF changes in externally triggered versus self-initiated conditions (ET versus SI).
Sequence of finger and foot movements
Table 2 presents the anatomical structures that showed significant rCBF changes in self-initiated versus externally triggered sequential movements (SSI versus SET). In the left cerebral hemisphere, the dorsolateral prefrontal cortex (Brodmann area 46), the parietal cortex (Brodmann area 40), the superior PMC and the pre-SMA showed significant changes in rCBF. No rCBF changes were found within the cerebellum.
No anatomical structures showed significant rCBF changes in externally triggered versus self-initiated conditions (SET versus SSI).
Discussion
The main objective of this study was to determine which neural structures are involved in the fine-tuning of synchronized motor commands in SI movements. First, we should briefly discuss the cortical structures that were activated. When compared to ET movements, the preparation of SI synchronized movements involves a coactivation of the dorsolateral prefrontal cortex, pre-supplementary motor area, lateral premotor cortex and parietal cortex. Overall, these cortical activities have been observed in previous human neuroimaging studies that have used a yoked protocol similar to ours (Deiber et al. 1999; Jenkins et al. 2000; Weeks et al. 2001). This suggests that SI synchronized movements of finger and foot involve cortical structures similar to those reported previously for simple SI finger movements. Lateral premotor structures failed to be preferentially activated in ET movements in the present study (when compared to SI movements). This failure of preferential lateral premotor activity in ET movements compared to SI movements supports previous human neuroimaging studies (Wessel et al. 1997; Jenkins et al. 2000; Weeks et al. 2001) but remains at odds with numerous primate studies (Thaler et al. 1988; Mushiake et al. 1991).
Concerning the cerebellum, a selective activation of the left postero-lateral hemicerebellum in the SI condition compared to ET movements was observed, while no such activity was present in the comparison between SSI and SET. This suggests the possible implication of the cerebellum in the generation of synchronized self-initiated movements compared to synchronized externally triggered movements. Previous studies comparing simple finger movements (Jahanshahi et al. 1995; Jenkins et al. 2000; Weeks et al. 2001) in SI and ET tasks, however, failed to report preferential cerebellar activation in the SI condition. The cerebellar activity observed in the SI condition cannot be explained by differences in the content of the afferent return derived from the executed movements: in both SI and ET conditions, subjects executed identical finger and foot movements at a similar pace (0.22 Hz). Hence, the observed cerebellar activity in the SI condition seems to be related to some specific requirements of the synchronization task required for SI compared to ET synchronized movements. Control SSI and SET results support this statement.
Numerous questions concerning this cerebellar activity in self-initiated synchronized movements still remain obviously open: what is its real source, what is its timing in the sequence of orderly neural processes underlying the achievement of the temporal goal of the task and, finally, what is its functional significance in the monitoring of SI movements? Two hypotheses that are not necessarily mutually exclusive will be tentatively explored.
The first hypothesis explaining the observed cerebellar activity could derive from differences in the timing of the reafferent information generated in feedback by the moving limbs. The reafferent information from the hand and foot converge synchronously at the cerebellum in SI movements and asynchronously in ET movements. In fact, this brings back the original idea of Paillard (1990) who argued that the cerebellum evaluates the timing of sensory reafferences. In SI movements, the cerebellum could act as a simple controller able to detect the delay between the sensory reafferences derived from the executed movements. This error signal could be used to adjust the timing of motor commands for the subsequent SI movements. In ET movements, both the hand and foot motor commands would be sent synchronously and no specific evaluation of the timing of sensory reafferences appears to be required. The second hypothesis supposes that this cerebellar activation intervenes proactively and derives from early feedforward adjustments of motor commands according to some internal representation of the goal. These adjustments would yield, in our task, the proper sequencing of motor commands in SI movements. Specifically, a cortico-cerebellar loop could have been activated during the motor programming period in order to achieve a movement of the foot that would precede the movement of the hand movement to meet the requirement of synchronous convergence of the reafferences from finger and foot movements at the cerebellar level. Thus, the timing differences observed in motor commands would be due to preliminary adjustments performed at an implicit sensory-motor level and in which, pretuning of the cerebellum would be involved. Conversely, for both SSI and SET movements, the task requires a delay in the motor command sent to the foot to achieve a movement of the finger first followed by a foot movement. Hence, the timing components of the SSI and SET tasks are similar and do not require differential timing processing, as suggested by the lack of cerebellar activity when comparing these two motor tasks.
Both of the above mentioned interpretations highlight the timing component of the SI task when compared to the ET task. The cerebellum has obviously often been considered as implicated in the evaluation of timing in different tasks (Ivry et al. 1988; Jueptner et al. 1996; Ivry 1997). The second of the previously proposed processes supposes an anticipatory process that clearly must precede the first. Unfortunately, PET imaging does not allow the possibility to segregate both sources in their temporal order of activation.
In conclusion, the current study showed that the cerebellum intervenes in the self-generation of synchronous movement involving distant body segments. The behavioural differences observed between the execution of SI and ET synchronized movements appear to be reflected in its activity. Further studies are needed to determine the precise timing of central events to allow an interpretation of the functional role presumed to be played by the contralateral hemicerebellum in self-initiated movements directed at a temporal target goal.
References
Bard C, Paillard J, Lajoie Y, Fleury M, Teasdale N, Forget R, Lamarre Y (1992) Role of afferent information in the timing motor commands: a comparative study with a deafferented patient. Neuropsychologia 30:201–206
Deiber MP, Honda M, Ibanez V, Sadato N, Hallett M (1999) Mesial motor areas in self-initiated versus externally triggered movements examined with fMRI: Effect of movement type and rate. J Neurophysiol 81:3065–3077
Evans AC, Marrett S, Torrescorzo J, Ku S, Collins L (1991) MRI-PET correlation in three dimensions using a volume-of-interest (VOI) atlas. J Cereb Blood Flow Metab 11: A69–A78
Evans AC, Marrett S, Neelin P, Collins L, Worsley K, Dai W, Milot S, Meyer E, Bub D (1992) Anatomical mapping of functional activation in stereotactic coordinate space Neuroimage 1:43–63
Fox PT, Raichle ME (1984) Stimulus rate dependence of regional cerebral blood flow in human striate cortex, demonstrated by positron emission tomography. J Neurophysiol 51:1109–1120
Fox PT, Perlmutter JS, Raichle ME (1985) A stereotactic method of anatomical localization for positron emission tomography. J Comput Assist Tomogr 9:141–153
Goldberg G (1985) Supplementary motor area structure and function: review and hypothesis. Behav Brain Sci 8:567–616
Ivry R (1997) Cerebellar timing systems. In: Schmahmann JD (ed) The cerebellum and cognition. Academic Press, Boston, pp 555–573
Ivry R, Keele S, Diener H (1988) Dissociation of the lateral and medial cerebellum in movement timing and movement execution. Exp Brain Res 73:167–180
Janhanshahi M, Jenkins H, Brown RG, Marsden D, Passingham RE, Brooks DJ (1995) Self-initiated versus externally triggered movements I. An investigation using measurement of regional cerebral blood flow with PET and movement-related potentials in normal and Parkinson’s disease subjects. Brain 118:913–933
Jenkins IH, Jahanshahi M, Juepter M, Passingham RE, Brooks DJ (2000) Self-initiated versus externally triggered movements II. The effect of movement predictability on regional cerebral blood flow. Brain 123:1216–1228
Jueptner M, Flerich L, Weiller C, Mueller SP, Diener HC (1996) The human cerebellum and temporal information processing-results from a PET experiment. Neuroreport 7:2761–2765
Larsson J, Guylyas B, Roland PE (1996) Cortical representation of self-paced finger movement. Neuroreport 7:463–468
Mushiake H, Inase M, Tanji J (1991) Neuronal activity in the primate premotor, supplementary, and precentral motor cortex during visually guided and internally determined sequential movements. J Neurophysiol 66:705–718
Owen AM, Doyon J, Dagher A, Sadikot A, Evans AC (1998) Abnormal basal ganglia outflow in Parkinson’s disease identified with PET. Implications for higher cortical functions. Brain 121:949–965
Paillard J (1948) Quelques données psychophysiologiques relatives au déclenchement de la commande motrice. Année Psychologique pp 28–47
Paillard J (1990) Réactif et prédictif: deux modes de gestion du geste de la motricité. In: Nougier V, Blanchi JP (eds) Pratiques sportives et modélisation du geste. Université Joseph-Fourier, Grenoble, pp 13–56
Picard N, Strick PL (1996) Motor areas of the medial wall: a review of their location and functional activation. Cereb Cortex 6:342–353
Raichle ME, Martin WR, Herscovitch P, Mintun MA, Markham J (1983) Brain blood flow measured with intravenous H2 15O. II. Implementation and validation. J Nucl Med 24: 790–798
Schmahmann JD, Doyon J, Toga AW, Petrides M, Evans AC (2000) MRI atlas of the human cerebellum. Academic Press, San Diego
Talairach J, Tournoux P (1988) Co-Planar stereotaxic atlas of the human brain: an approach to cerebral imaging. Georg Thieme Verlag, New York
Thaler DE, Rolls ET, Passingham RE (1988) Neuronal activity of the supplementary motor area (SMA) during internally and externally triggered wrist movements. Neurosci Lett 93:264–269
Thut G, Hauert CA, Viviani P, Morand S, Spinelli L, Blanke O, Landis T, Michel C (2000) Internally driven vs externally cued movement selection: a study on the timing of brain activity. Cogn Brain Res 9:261–269
Weeks RA, Honda M, Catalan MJ, Hallett M (2001) Comparison of auditory, somatosensory and visually instructed and internally generated finger movements: a PET study. Neuroimage 14:219–230
Wessel K, Zeffiro T, Toro C, Hallett M (1997) Self-paced versus metronome-paced finger movements. J Neuroimaging 7:145–151
Worsley KJ, Evans AC, Marrett S, Neelin P (1992) Determining the number of statistically significant areas of activation in subtracted activation studies from PET. J Cereb Blood Flow Metab 12:900–918
Worsley KJ, Marrett S, Neelin P, Vandal AC, Friston KJ, Evans AC (1996) A unified statistical approach for determining significant signals in images of cerebral activation. Hum Brain Map 4:58–73
Acknowledgements
We wish to thank the subjects who participated in this study. Thanks also go to Dr. Julien Doyon for his help to design the experiment and to analyse the data and to the staff of the McConnell Brain Imaging Centre and of the Medical Cyclotron Unit for their assistance in the collection and analysis of these data. The financial support by NSERC (National Sciences and Engineering Reseach Council of Canada) and CIHR-FCQ (Canadian Institutes of Health Research-Fondation Chiropratique du Québec) is gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Blouin, JS., Bard, C. & Paillard, J. Contribution of the cerebellum to self-initiated synchronized movements: a PET study. Exp Brain Res 155, 63–68 (2004). https://doi.org/10.1007/s00221-003-1709-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-003-1709-9