
Abstract
The present study compared the contribution of visual information of hand and target position to the online control of goal-directed arm movements. Their respective contributions were assessed by examining how human subjects reacted to a change of the position of either their seen hand or the visual target near the onset of the reaching movement. Subjects, seated head-fixed in a dark room, were instructed to look at and reach with a pointer towards visual targets located in the fronto-parallel plane at different distances to the right of the starting position. LEDs mounted on the tip of the pointer were used to provide true or erroneous visual feedback about hand position. In some trials, either the target or the pointer LED that signalled the actual hand position was shifted 4.5 cm to the left or to the right during the ocular saccade towards the target. Because of saccadic suppression, subjects did not perceive these displacements, which occurred near arm movement onset. The results showed that modifications of arm movement amplitude appeared, on average, 150 ms earlier and reached a greater extent (mean difference=2.7 cm) when there was a change of target position than when a change of the seen hand position occurred. These findings highlight the weight of target position information to the online control of arm movements. Visual information relative to hand position may be less contributive because proprioception also provides information about limb position.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Arm movements towards visual targets are controlled by processing information relative to hand and target positions (see Desmurget et al. 1998 for a review and Georgopoulos et al. 1981). Hand position is mainly determined through vision and proprioception (see van Beers et al. 1996, 1999). Target position is determined through vision (by combining information about the target's retinal image and extraretinal signals coding eye position in the orbit). A large body of evidence shows that once this information is gathered, the central nervous system (CNS) generates a motor plan that defines the amplitude and direction of the movement (Rossetti et al. 1995).
The contribution of arm muscle proprioception in arm motor control has been evidenced in studies that used the technique of muscle tendon vibration. Arm movement accuracy decreases when biceps or triceps tendons are vibrated during movement, suggesting that proprioception contributes to the online control of movement (Redon et al. 1991; Sittig et al. 1987; Steyvers et al. 2001). Inaccuracy of deafferented patients reaching for targets also argues for a significant role for kinaesthetic afferents (Blouin et al. 1993a, 1996; Ghez et al. 1995; Nougier et al. 1996). In addition, results from several studies have shown that movement accuracy increases when visual feedback of the moving limb is available (Bard et al. 1985; Carlton 1981; Proteau et al. 2000; Spijkers and Spellerberg 1995). However, contribution of hand visual feedback to the online control of movement has been questioned by some experiments in which movements with or without visual feedback of the hand yielded similar accuracy, either when the target was visible throughout the movement (e.g., Blouin et al. 1993b for movement amplitude accuracy; Vercher et al. 1994) or not (e.g., Elliott 1988). In most of these studies, subjects reached a high level of accuracy without visual feedback of the limb (errors of about 1° in direction and 1 cm in extent). Therefore, the precision gain due to the addition of visual feedback could only be small. Processing visual feedback of the hand is likely to improve movement accuracy when, for some reason (e.g., high task difficulty), the planned movement and the proprioceptive feedback processing still result in large movement errors. Nevertheless, similar endpoint accuracy in movements with and without visual feedback of the arm should not be seen as a definite demonstration that vision is not processed during arm movement. A detailed analysis of the kinematics could reveal whether the same mechanisms are used or if different mechanisms lead to the same terminal accuracy.
It is generally agreed that arm movement planning is largely based on extrinsic properties of the target. For instance, acceleration at movement onset is higher when reaching distant rather than close targets (Gielen et al. 1985) and also hand movement direction at movement onset is close to the target direction (Messier and Kalaska 1999; van Sonderen et al. 1989). There is also a large body of evidence suggesting that information about target position is used to guide the movement during its entire duration. Indeed, subjects are generally more accurate when they can see the target throughout the arm movement than when vision of the target is removed at movement onset (Elliott 1988; Lemay and Proteau 2001; Prablanc et al. 1986). Contribution of target information to the online control of arm movements has also been evidenced in experiments using the so-called double-step paradigm, where the target is displaced at movement onset (Boulinguez et al. 2001; Desmurget et al. 1999; Georgopoulos et al. 1981; Komilis et al. 1993; Martin et al. 2000; Soechting and Laquaniti 1983). These studies showed that subjects can modify arm movement trajectory after an unexpected change of target position. These adjustments occur whether target displacements are consciously perceived or not consciously perceived, as when they occur during a saccadic eye movement (Bridgeman et al. 1979). During a saccade, target displacements as large as 15% of the target distance are usually not consciously perceived because the spatial perception of visual stimuli is highly reduced (saccadic suppression of displacement; Bridgeman et al. 1979). The eyes generally move before the arm when a target appears in the peripheral field (Pélisson et al. 1986; Vercher et al. 1994). Then, if target displacement is triggered during the saccade that brings the eyes onto the target, the change of location occurs near arm movement onset. Generally the double-step paradigm reveals smooth deviations of arm trajectory towards the new target position, suggesting online modification of the arm motor commands rather than reprogramming of a second corrective movement (Bard et al. 1999; Blouin et al. 1995a; Goodale et al. 1986; Pélisson et al. 1986; Prablanc and Martin 1992; Turrell et al. 1998).
The occurrence of trajectory corrections during reaching movements on the basis of both hand and target position information has therefore been widely evidenced. To our knowledge, Carlton (1981) was a pioneer in his attempt to compare the contributions of visual information of hand and target position in arm motor control. He found that movement accuracy decreased to a greater extent when vision of the hand was withdrawn than when vision of the target was precluded at the arm movement onset. However, these results were not confirmed by Elliott (1988) and Berkinblit and colleagues (1995), who found greater movement accuracy when only the target was seen during the course of the movement than when only the hand was seen. In all these studies, the contribution of target and hand visual feedback was tested by withdrawing either source of feedback. This was done in Carlton's and Elliott's studies by switching off the room lights while visual feedback of either hand or target position remained available by using phosphorescent paper. Such large transitions in the room illumination and in the availability of hand or target visual feedback during the course of the movement may be regarded as somewhat perturbing for the subjects. This procedure could also have deteriorated the reliability of target localization as it removed visual cues that could have been used to determine target position in the allocentric frame of reference. Moreover, withdrawing visual feedback of the target may be more perturbing than withdrawing visual feedback of the hand because vision is the only sense providing information about target position, while hand position can still be determined through proprioceptive afferents.
Considering these contradicting results and the apparently perturbing methods that were previously used, the goal of the present study was to re-assess the relative contribution of hand and target visual feedback in the online control of goal-directed arm movements. Vision of both hand and target was constantly available. The relative contributions of hand and target visual feedback were assessed by changing either the seen hand position or the seen target position near movement onset. These changes were not consciously detected because they occurred during the saccadic eye movements that brought the subjects' gaze onto the target. Compared to previous studies cited above, which considered only final hand positions (e.g., Berkinblit et al. 1995; Carlton 1981; Elliott 1988), we also analysed hand movement kinematics to study the effect of changes in seen target position or seen hand position, the earliest and the greatest modifications of hand movement kinematics implying the most efficient processing.
Methods
Subjects
Six self-declared right-handed volunteers (males, 23–35 years of age) participated in the present experiment. They all had normal or corrected-to-normal vision and reported no known pathology. The local Ethics Committee accepted the protocols and all subjects gave their informed consent prior to their participation in the study.
Experimental set-up
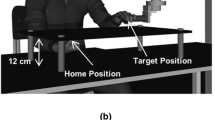
Figure 1 shows the experimental set-up. Subjects, seated in complete darkness, bit into a previously imprinted mouthpiece that was fixed on the apparatus to prevent head movements during the experiment. In their right hand, subjects held a pointer which consisted of two light telescoping steel rods fitted together to allow pointing movements in the horizontal plane despite their floor point of fixation. A light 12×12-cm board of 100 orange light-emitting diodes (LEDs, 3 mm in diameter) was mounted and centred on the upper end of the pointer. These LEDs could be used to provide visual feedback that either corresponded or did not correspond to the actual horizontal hand position. However, only three of these LEDs were used in the present experiment: one LED corresponded to the actual hand position; a second LED was positioned 4.5 cm to the left of the first LED; and a third LED was positioned 4.5 cm to the right (see Fig. 2B). Subjects were told that only the LED corresponding to the actual hand position would be lit during the experiment. Two potentiometers located at the rod base were used to measure movements of the pointer in the sagittal (y coordinate) and frontal (x coordinate) planes. Signals from the potentiometers were sampled at 500 Hz using a 12-bit analogue/digital converter.

Schematic side (A) and top (B) views of the apparatus. Targets and hand starting positions were in the fronto-parallel plane

Illustrations of the experimental conditions with a change in target position (A) and in pointer LED position (B). A. The target appearing 36 cm away from starting position was displaced 4.5 cm either to the left (T− condition) or to the right (T+ condition) during the saccade. In T− condition, subjects had to reduce hand movement amplitude in order to bring the pointer LED precisely to the new target position. In T+ condition, an increased movement amplitude was necessary. B. The LED indicating hand position was shifted 4.5 cm either to the left (condition H−) or to the right (condition H+) during the saccade. In H− condition, subjects should have increased their movement amplitude if they used the new visual information relative to hand position to reach the target. In H+ condition, an amplitude reduction was needed in order to bring the illuminated LED precisely onto the target
The virtual images of three green LEDs, seen through a semi-reflecting horizontal glass, were used as targets. The LEDs, positioned 50 cm in front of the participants, were located at 31.5 cm, 36 cm and 40.5 cm from hand starting position (see Fig. 1B). These distances corresponded to 18°, 24° and 30° of visual angle with respect to body midline. The starting position, which was also indicated by the virtual image of a green LED, was 18 cm to the left of body midline (−24°) and was in the same fronto-parallel plane as the targets. When gazing at the starting LED position, the targets appeared at 42°, 48° or 54° from line of sight. Since targets were virtual, no physical contact with them was possible. Subjects had to control both the direction and extent of their movement. However, because the hand starting position and the targets were aligned in the same plane, movement direction was the same for all conditions. Thus, this experiment essentially compared the capacity of subjects to control the amplitude of arm movements.
Horizontal eye movements were monitored by means of DC electro-oculography (EOG) with conventional bio-isolated amplifiers (Lablinc V® marketed by Coulbourn™). Small silver-silver chloride surface electrodes (10 mm in diameter) were fixed near the outer canthi of the eyes and a ground electrode was placed in the centre of the forehead. The experimental sessions started 15 min after applying the electrodes and switching off the lights as most of the changes in the corneo-retinal potential of the eye occur within the first 15 min of the light to dark transition (Gonshor and Malcolm 1971). The EOG signal was digitised at 500 Hz.
Procedure: experimental conditions
At the start of each trial, both the pointer LED corresponding to the actual hand position and the LED indicating the starting hand position were lit for 2.5 s. Subjects were instructed to look at the starting position and to move the pointer LED to a position coinciding with that of the virtual starting LED. Then, the starting position LED was switched off and a target positioned at either 31.5 cm (T31.5 condition), 36 cm (T36 condition) or 40.5 cm (T40.5 condition) was switched on for 2.5 s. Subjects were instructed to "reach directly for the visual target with the pointer and maintain final hand position until the end of the trial". These three conditions were used as control conditions as there was no perturbation. In some trials for which the 36-cm target was used, one of the following events could occur when the eyes reached 40% of the target distance (i.e., during the saccadic suppression phenomenon):
-
The 36-cm target was switched off and the 31.5-cm target was switched on (T− condition)
-
The 36-cm target was switched off and the 40.5-cm target was switched on (T+ condition)
-
The pointer LED indicating the actual hand position was switched off and the LED placed 4.5 cm to its left was switched on (H− condition)
-
The pointer LED indicating the actual hand position was switched off and the LED placed 4.5 cm to its right was switched on (H+ condition)
Because the target and pointer LED shifts occurred near peak velocity of the primary saccade, both types of displacement occurred in peripheral vision. In T− and H+ conditions, if subjects used the visual information of hand and target position to control their arm movement, they would reduce movement amplitude by 4.5 cm to bring the pointer LED precisely under the target. On the other hand, subjects would increase movement amplitude by 4.5 cm in both T+ and H− conditions (see Fig. 2).
Subjects were asked to "synchronise the best they could eye and arm movement onsets". No instruction was given about reaction time and subjects were asked to produce movements of natural duration, but not too slowly. Practice trials (N=7) allowed subjects to comply with these instructions. During the experimental session, movements lasting less than 300 ms or more than 600 ms were rejected and repeated at the end of the session. This temporal window was chosen to reduce between- and within-subjects variability in movement durations and, as a consequence, in movement accuracy (cf speed-accuracy trade-off, Fitts 1954). The use of short movement duration emphasised the possibility to process hand and target information to control online goal-directed arm movements. To control whether target or pointer LED displacements were perceived, subjects were told that technical problems could occur during the experiment. They were required to report any odd event such as illumination of more than one target or pointer LEDs during a trial. Seven repetitions were performed in each of the 7 experimental conditions and the order of presentation of the conditions was pseudo-randomly selected in a session.
Hand movement parameters
The main measured parameter was movement amplitude, defined as the distance at a given time between starting position and actual hand position (rather than the illuminated pointer LED). Movement amplitude in the different experimental conditions was compared at the offset of the primary movement, i.e., when hand velocity dropped under 5 cm/s. However, data analysis showed that the hand was not completely stabilised at the end of the movement. Indeed, hand movements were followed by a stabilisation period during which absolute hand velocity could be greater than 5 cm/s. Such hand motion, which had already been observed in a previous experiment using a similar apparatus (Blouin et al. 1995b), occurred because no physical contact was possible between the hand and the target. This phase could have been used to bring the lit pointer LED closer to the illuminated target. Hand position was therefore compared after both the primary movement and the stabilisation phase. To do so we created, a posteriori, an independent variable "phase" with two levels: primary movement and stabilisation phase. The offset of the stabilisation phase was defined as the first time hand velocity dropped within ±5 cm/s and stayed between these values until the end of the trial.
To determine when the shift in target or pointer LED position started to have a significant and permanent (i.e., until the end of the movement) effect on movement amplitude, statistical comparisons (ANOVA and post-hoc tests) between mean movement amplitude in the T36 control condition and in the T+, T−, H+, H−- conditions were carried out every 10 ms after movement onset (defined as the first time movement velocity exceeded 5 cm/s). For these analyses, an alpha level of 0.01 was used (rather than 0.05) to reduce probability of false positive inferences during multiple comparisons. To determine if, and if so when, modifications in amplitude could be considered as complete, mean movement amplitudes in the conditions of a perturbation were compared to those obtained in the control conditions (either T31.5 or T45.5, depending on the required change of movement amplitude); this was also conducted at 10 ms intervals. Here, to reduce probability of false negative inferences, an alpha level of 0.05 was used.
Durations of the primary movement and the stabilisation phase were computed. The effect of the different experimental conditions on velocity and acceleration profiles of the primary hand movement was also assessed (e.g., peak values and the time at which these peaks were reached).
Eye movement parameters
Eye movements were measured to analyse the oculomotor behaviour and to verify whether the hypothetical change of movement amplitude after shifts in target position could be related to the ocular movements. Amplitude and duration of the saccades were determined. Eye movement onset and offset were detected using a 30°/s criterion (Becker 1989).
Analyses of variances (ANOVA) with repeated measures were used to analyse the experimental data and post-hoc analyses were performed using Newman-Keuls tests.
Preliminary experiment
To our knowledge, the present experiment is the first where saccadic suppression has been used to modify visual information of hand position. Because hand position can be determined through both visual and proprioceptive information, subjects could have detected a gap as large as 4.5 cm between their actual hand position and the LED indicating hand position. We ran a preliminary experiment to test this possibility with three subjects. Subjects, seated in complete darkness, were asked to hold a pointer in front of them and look at it. All subjects could easily detect the gap when the LED positioned either 4.5 cm to the left or to the right of the actual hand position was the first to be lit. However, when the first pointer LED to be lit corresponded to the actual hand position and this LED was subsequently displaced during the eye (saccadic suppression) and arm movements towards the target, none of the subjects detected the gap. Moreover, none of the three subjects perceived a mismatch between hand and pointer LED positions when, for the next trial, the pointer LED that corresponded to the actual hand position was first lit. Therefore, in the experiment reported here, the veridical visual feedback provided to subjects to signal their hand position at the beginning of each trial was likely sufficient to refresh the calibration of the arm muscles proprioception (Desmurget et al. 1997; Prablanc et al. 1979).
Results
Subjects reported no difficulty in performing the task. As expected, subjects did not consciously perceive changes in target or pointer LED positions. No subject reported any odd event during the trials. Subjects were told only after the experiment that either the target or the pointer LED was occasionally shifted in position during their ocular movements towards the peripheral target. Ignoring the saccadic suppression phenomenon, most of them could hardly believe what really happened during the experiment.
Timing of the shift in target and pointer LED positions
On average, saccadic eye movements started 59 ms before arm pointing movements. Shifts in target or pointer LED positions were made on average 15 ms before arm response initiation. Since this latency is definitely too short to plan a new movement (van Sonderen et al. 1989), any modification of the kinematics likely to occur during the movement would indisputably be the result of online changes in the initially planned movement.
Hand movement parameters
Table 1 shows the analysed parameters of the hand movements. Movement amplitude at the end of both the primary movement and the stabilisation phase (see Fig. 3) was analysed by a 7×2 ANOVA [Condition (T31.5, T−, H−, T36, T+, H+, T40.5) x Phase (primary movement, stabilisation phase)]. A significant interaction was found (F6, 30=21.05; P<0.001). The decomposition of the interaction showed that movement amplitude at the end of the primary movement differed significantly between the T31.5 (mean=31.8 cm), T36 (mean=36.2 cm) and T40.5 (mean=40.5 cm) conditions. In each of these conditions, movement amplitude measured after the stabilisation phase was not statistically different from that reached after the primary movement (P>0.05), implying that no adjustments were performed during these stabilisation phases. These observed stabilisation phases were likely due to oscillations that occur after rapid arm movements when no physical contact with a target is possible.

Average movement amplitude at the end of both the primary movement (white bars) and the stabilisation phase (black bars). In the legend, leftward and rightward shifts in target and pointer LED were assigned negative and positive values, respectively
Movement amplitude after the primary movement in the T+ condition (mean=40.4 cm) differed significantly from the T36 condition, but was not statistically different to the T40.5 condition. Therefore, subjects directly reached the new target position when the target displacement required a 4.5-cm increase in movement amplitude. A similar increase in movement amplitude was also necessary to bring the pointer LED accurately to the 36-cm target in the H− condition. In this condition, subjects did increase their movement amplitude, as amplitude at the end of the primary movement was significantly larger in the H− (mean=37.7 cm) than in the T36 condition. However, modification in movement amplitude was not complete as movement amplitude in the H− condition was also different from that measured in the T40.5 condition. During the stabilisation phase, movement amplitude increased significantly but the pointer LED still tended to undershoot the target after the stabilisation phase (mean=39.3 cm).
Both the T− and H+ conditions required a 4.5 cm-decrease in movement amplitude to bring the pointer LED to the target. At the end of the primary movement, movement amplitude in the T− condition (mean=33.2 cm) was significantly different from that measured in the T36 condition (mean=36.2 cm), but also differed from movement amplitude measured in the T31.5 condition (mean=31.8 cm). Therefore, subjects significantly decreased the amplitude of their movements but not sufficiently enough to accurately reach the new target position. The stabilisation phase allowed subjects to bring the pointer LED precisely to the target, as movement amplitude was not statistically different between the T− and T31.5 conditions at the end of this phase (P>0.05). Movement amplitude at the end of the primary movement was not statistically different between the H+ (mean=35.9 cm) and T36 (mean=36.2 cm) conditions. Therefore, in the H+ condition, subjects brought their actual hand to the target rather than the pointer LED, which therefore overshot the target by some 4.5 cm. Subjects partially took into account this visual error signal, as movement amplitude was significantly different at the end of the stabilisation phase (mean=33.1 cm) as compared to the end of the primary movement. However, the pointer LED was still not on the target as movement amplitudes in the H+ and T31.5 conditions still differed significantly.
A 7×2 ANOVA [Condition (T31.5, T−, H−, T36, T+, H+, T40.5) x Phase (primary movement, stabilisation phase)] was performed to analyse the effect of the experimental conditions on within-subject variability (standard deviation of each subject's mean) of movement amplitude at the end of the primary movement and after the stabilisation phase. No significant effect of condition was found (F6, 30=0.77; P>0.05). Movement amplitude variability did not increase when target or pointer LED displacements occurred. The ANOVA revealed a main effect of the phase. Variability was greater at the end of the primary movement (global mean=1.5 cm) than at the end of the stabilisation phase (global mean=0.6 cm) (F1, 5=36.70; P<0.01). No significant interaction was found (F6, 30=0.19; P>0.05).
First differences of movement amplitude
One-way ANOVAs were performed on mean movement amplitude, as measured every 10 ms from arm movement onset, and post-hoc analyses were used to approximate the moment when movement amplitude in each condition with target or pointer LED displacements became and remained significantly different from the amplitude observed in the T36 control condition (Fig. 4). In the T+ condition, the first significant difference was detected 320 ms after movement onset. Movement amplitude was then 34.6 cm compared to 33.1 cm in the T36 condition. 440 ms after movement onset, the significant difference in amplitude between the T+ and T40.5 conditions disappeared.

Average movement amplitude as a function of time in the T36 condition and in conditions with a change of either target position or pointer LED position. Vertical arrows indicate when movement amplitude first significantly differed from the movement amplitude in the T36 condition. Mean time of occurrence is reported in brackets
320 ms after movement onset, movement amplitude in the T− condition (mean=31.8 cm) started to differ significantly from that measured in the T36 condition (mean=33.1 cm). Therefore, differences in movement amplitude in target displacement conditions were detected at the same time and approximately at the same position in the T+ and T− conditions. However, at the end of the primary movement in the T− condition, movement amplitude still differed from that computed in the T31.5 condition, indicating that the significant modification in movement amplitude did not allow subjects to bring the hand precisely to the target.
Movement amplitude was still not statistically different between the H− and T36 conditions at the time movements were completed in the T36 condition. Movement amplitude at movement offset in the T36 condition was therefore used in the analysis to determine when movement amplitude in the H− condition differed from that observed in the control condition. The first significant differences appeared 470 ms after the hand left the starting position. However, at the end of the primary movement, movement amplitude still differed from that in the T40.5 condition. Therefore, the pointer LED was still not on the target by the end of the primary movement. Finally, as mentioned above no significant amplitude modification was observed during the primary movement in the H+ condition. Overall, changes in movement amplitude were greater and occurred earlier following a change of target position than after a change of pointer LED position.
As stated above, the shift introduced in target or pointer LED positions occurred slightly before arm movement onset. When adding the mean latency between the change of visual information and the reaching onset to the time movement amplitude first started to be significantly different in each condition, mean reaction times to the change of visual feedback were 327 ms, 345 ms and 487 ms in the T+, T− and H− conditions, respectively.
Movement duration
The ANOVA revealed a significant effect of the experimental conditions on the duration of the primary movement (F6, 30=45,34; P<0.001). As shown in Fig. 5A, movement duration increased with distance of the primary target. On average, movement duration was 407 ms, 454 ms and 473 ms in the T31.5, T36 and T40.5 conditions, respectively. Movement duration in the T+ condition (mean=537 ms) was significantly longer than movement duration in the T36 and T40.5 conditions. This was probably linked to the observed increase in amplitude. Movement duration in the H− condition (mean=503 ms) was significantly longer than movement duration in the T36 and T40.5 conditions, but significantly shorter than movement duration in the T+ condition, where greater increases of amplitude were observed.

Movement durations (A) and durations of the acceleration and deceleration phases (B)
The decreased movement amplitude found in the T− condition was associated with a significantly reduced movement duration (mean=394 ms) as compared to movement duration in the T36 condition. Movement duration turned out to be not statistically different to movement duration in the T31.5 condition (mean=407 ms). Movement duration in the H+ condition (mean=414 ms) was also significantly reduced as compared to movement duration in the T36 condition and was not statistically different to movement duration in the T31.5 condition. This was an unexpected result, as amplitude reduction was not observed in this condition.
Acceleration and deceleration phase durations
Durations of acceleration and deceleration phases of the primary movement are shown in Fig. 5B for the seven experimental conditions. They were submitted to a 7×2 ANOVA [Condition (T31.5, T−, H−, T36, T+, H+, T40.5) x Phase (Acceleration, Deceleration)]. A significant interaction was found (F6, 30=23.27; P<0.001). The decomposition of the interaction showed that acceleration phase duration was not statistically different among the conditions (global mean=192 ms). On average, deceleration phase duration was longer than acceleration phase duration and was markedly affected by the experimental conditions. For the conditions without target or pointer LED displacements, deceleration phase duration increased with target amplitude, except for the difference between T36 and T40.5, which was not significant (P=0.09). On average, deceleration phase duration was 223 ms, 264 ms and 279 ms in the T31.5, T36 and T40.5 conditions, respectively.
Deceleration phase durations were similar in the T31.5, T− and H+ conditions (global mean=215 ms), but were shorter in these conditions than in all other conditions (global mean=299 ms). Therefore, when the target or pointer LED was displaced in such a way that movement amplitude had to be reduced, a decrease in deceleration phase duration of the primary movement was observed. On the other hand, even though no significant change of movement amplitude was found in the H+ condition, a significant decrease in deceleration phase duration was found.
Conditions requiring an increase in movement amplitude were associated with longer deceleration phases. Deceleration phase duration was statistically longer in the H− condition (mean=315 ms) than in the T40.5 condition (mean=279 ms). Deceleration phase duration was longest in the T+ condition (mean=340 ms), i.e., in the only condition where complete correction at the end of the primary movement was found.
Table 2 reports the statistical results of the analyses performed on the values of peak acceleration, peak velocity and peak deceleration and on the time of their occurrence. Overall, shifting the pointer LED or the target position only affected the deceleration phase and not the acceleration phase. This corroborates the findings that movement amplitude started to differ between the T36 condition and the conditions with perturbation only late in the trajectory (320 ms after movement onset or later).
A closer inspection of each trial for each subject was performed to search for trials in which the primary movements were composed of more than one peak velocity. Few such trials could be found, suggesting that online modifications of movement kinematics were generally smooth and continuous. However, an ANOVA revealed a significant effect of experimental condition on the number of trials with multiple velocity peaks (F6, 30=6.63; P<0.001). Conditions T+ and H− had significantly more trials with multiple velocity peaks (global mean = 2.1/subject) than conditions T31.5, H+, T− and T36 (global mean = 0.5/subject). However, there was no significant difference among the T+, H− and T40.5 conditions. Therefore, subjects produced movements with multiple velocity peaks more frequently when a longer distance was covered, irrespective of whether or not there was a jump in the pointer LED or target positions.
Stabilisation phase
A one-way ANOVA revealed a significant effect of the experimental conditions on the stabilisation phase duration (F6, 30=11.71; P<0.001). This duration was similar in conditions with a shift in pointer LED (global mean=412 ms), and was significantly longer in these conditions than in all other conditions (with or without target displacements). On the other hand, the stabilisation phase of these other conditions was not significantly different (global mean=225 ms). Therefore, target displacements had no effect on the stabilisation phase, while pointer LED displacements caused a considerable increase in the duration of the stabilisation period. This longer duration was associated, as seen in previous sections, to modifications in movement amplitude.
Eye movement parameters
Eye movements were analysed to verify how the changes in movement amplitude observed after target displacements could be related to oculomotor behaviour. Table 3 shows mean and standard deviation of eye movement parameters, and statistical results are shown in Table 4. Theoretically, a retinal error was present at the end of the saccade in the T− and T+ conditions due to the target displacement during the saccade, and a corrective saccade was necessary to foveate the target. This oculomotor behaviour was always observed in the T+ condition, where the angular distance of the target increased. However in the T− condition, a corrective saccade was observed in only about one half of the trials (24 trials out of 42). In the other trials, no corrective saccade could be detected. The saccade undershot the primary target such that no corrective saccade was needed to bring gaze on the displaced target. Target undershoots of approximately 10% have been frequently reported in the literature (Baizer and Bender 1989; Becker and Fuchs 1969; Bekkering et al. 1995). This provided us with an opportunity to test whether the presence of retinal error at the end of a saccade and extraretinal signals related to corrective saccades resulted in greater change of movement amplitude than the absence of these signals. A t-test for unrelated samples was used to test whether the amplitude of the primary arm movement was similar for trials with and without corrective saccades in the T− condition. The result showed no significant difference (t(9)=0.81; P>0.05). A linear regression analysis describing the relationship between the magnitude of the corrective saccade and the amplitude of the primary arm movement was also performed. No correlation was found (R2=0.07). Therefore, presence of retinal error and of subsequent corrective saccades was not associated with greater online modification of movement amplitude.
Control experiment with visual open-loop pointing
Modifications in movement amplitude were larger and occurred earlier in the trajectory when there was a change of target position than when the pointer LED was shifted. This result suggests greater processing efficiency for target-related visual information compared to that for hand-related visual information in the control of ongoing movements. However, in both the T− and T+ conditions, subjects could use the visual feedback of the hand throughout the whole movement. Therefore, the processes resulting in movement modification could have involved not only target position information but also visual information of the hand. This possibility was tested in a control experiment in which the visual feedback of the actual hand position was withdrawn during the saccade near movement onset. As in the previous experiment, subjects moved the pointer towards the targets positioned either at 31.5 cm, 36 cm or 40.5 cm from the starting position. In some trials using the 36-cm target, there was either a 4.5-cm decrease or increase in target amplitude when the eye reached 40% of the target distance. Subjects (N=6) were the same as in the previous experiment and seven trials were performed in each condition.
As in the previous experiment, none of the subjects perceived target displacements. Movement amplitude measured in the previous experiment (i.e., with visual feedback of the actual hand position) was compared with movement amplitude measured in the control experiment. A 5×2 ANOVA [Condition (T31.5, T−, T36, T+, T40.5) x Visual loop (Open, Closed)] showed a significant effect of condition (F4, 20=216.01; P<0.001) but no effect of vision of the hand (F1, 5=0.13; P>0.05) and no interaction (F4, 20=0.89; P>0.05). Thus, the amount of modification of movement amplitude was similar in visual open- and closed-loop conditions.
In the T− condition, the amplitude of the primary movement significantly differed (P<0.01) from that recorded in the T36 condition: 380 ms after movement onset (movement amplitude=32.7 cm) as compared to 320 ms when hand visual feedback was available in the previous experiment.
In the T+ condition, first significant differences (P<0.01) appeared 400 ms after arm movement onset (movement amplitude=36.8 cm) as compared to 320 ms when subjects could see their hand position during the movement. 530 ms after movement onset, the significant difference in amplitude between the T+ and T40.5 conditions disappeared (P>0.05), suggesting complete correction of movement amplitude before the end of the primary movement.
All measured kinematics parameters are reported in Table 5. Except for the acceleration phase duration, all of them were similarly affected by the experimental conditions as in the previous experiment. The acceleration phase turned out to be significantly affected by the experimental conditions but post-hoc tests failed to reveal any significant difference between the conditions.
Discussion
The results clearly showed earlier and greater online modifications in arm movement amplitude for changes in target position than for changes in seen hand position. This highlights the contribution of target position information in the online control of goal-directed arm movements. Therefore, these results corroborate those obtained by Elliott (1988) and Berkinblit and colleagues (1995), who used different experimental methods. Goal-directed arm movements such as those performed in the present experiments are externally driven by target position. Because the target is an external element of the body and not self-chosen by the subjects, information related to its position is of the highest importance in the organisation and accuracy of arm movements. With respect to target position information, visual feedback of the hand during the movement can be thought of as being less essential in the online control of arm movement. Indeed, results from several experiments suggest that both proprioceptive and visual information about hand starting position contributes to the planning of goal-directed arm movements (Ghez et al. 1995; Prablanc et al. 1979).
Pélisson et al. (1986) showed that subjects are able to adjust ongoing arm movements after a target displacement without visual feedback of the moving arm. This was confirmed by several authors (e.g., Blouin et al. 1995a; Komilis et al. 1993; Prablanc and Martin 1992; Turrell et al. 1998). Therefore, seeing simultaneously both the target and the hand is not necessary to control reaching movements. In our study, similar amounts of movement amplitude modifications were observed for movements unfolding with and without hand visual feedback when a shift in target position occurred. However, a detailed analysis of movement kinematics showed that modifications of amplitude occurred earlier when visual feedback of the hand was available (on average 320 ms) than when it was not (on average 390 ms). A similar observation was also reported by Prablanc and Martin (1992) when the target displacements required an increase in movement amplitude but not a decrease. Together, these results suggest that visual feedback of the hand contributed to the corrections observed in the arm movement amplitude when a shift in target position occurred. They also imply that the similar accuracy sometimes found in movements with and without visual guidance should not be regarded as evidence for a non-contribution of hand visual feedback in the control of arm movements. Even if the endpoints are similar, mechanisms underlying movement control can differ for movements with or without visual feedback. Interestingly, when the target position remained unchanged, no modifications of movement amplitude (in the H+ condition) or only late modifications (470 ms in the H− condition) occurred following changes in seen hand position. This suggests that information related to hand position was processed more efficiently when a change of target position occurred. Information about target position error in the case where target is displaced seems to increase the CNS sensitivity to hand position information to perform the required change of movement amplitude. These operations would not be under voluntary control as subjects perceived neither changes in hand- or target-related visual feedback nor the ensuing modifications to the arm movement. This highlights the efficiency of automatic (unconscious) sensorimotor processes in the online control of goal-directed arm movements (Goodale et al. 1986; Pélisson et al. 1986; Prablanc and Martin 1992).
Differences between amplitude and directional control
Modifications in arm movement amplitude were associated with changes in movement kinematics and duration. When the shift in target or seen hand positions required a reduction in movement amplitude, a decrease in movement duration was observed. When the perturbation necessitated an increase in movement amplitude, movement duration increased. These changes in movement duration were entirely explained by changes in deceleration duration, the acceleration duration remaining constant across experimental conditions. This is in contrast with both Turrell et al.'s (1998) and Prablanc and Martin's (1992) studies, where trajectory deviations were observed in the acceleration phase after unperceived target displacements. In these studies, target displacements required a modification in movement direction rather than a change of movement amplitude, as in the present experiment. The fact that movement direction is specified and controlled early in the trajectory could contribute for early trajectory deviations (Bard et al. 1985; Blouin et al. 1993b; Proteau et al. 2000; see Paillard 1996 for a review). As in the present study, Komilis et al. (1993) and van der Meulen et al. (1990) found that the movement acceleration phase is not modified when target displacements require a change of movement amplitude. Visual feedback of the initial portion of the movement would provide little information to control the extent of the movement. The present results therefore suggest that visual feedback of rapid arm movements better serves movement direction than movement amplitude. The speed of the movements was likely too high for the low-speed sensitive central vision to control movement extent. This may imply that the amplitude component of a rapid reaching movement is mainly controlled by proprioceptive feedback and/or feedforward processes.
Task spatio-temporal constraints
Changes in target or pointer LED positions that required a lengthening of movement amplitude resulted in greater corrections than those requiring a shortening of movement amplitude. This could be explained by differences in the spatio-temporal constraints between these two types of perturbations. Indeed, when the perturbation decreased the relative distance between target and pointer LED position by 4.5 cm, subjects had less time to correct their ongoing movements and were therefore more likely to overshoot the target. For instance, the first significant correction observed when the shift in target position decreased the required movement amplitude appeared only when the hand was almost on the target. The braking that was found in this condition occurred too late to stop the hand precisely on the target. On the other hand, spatio-temporal constraints were smaller when the perturbation increased the relative distance between the target and pointer LED positions, thus providing more chance for adjustments to take place. Complete correction in movement amplitude was found by Pélisson et al. (1986) (see also Goodale et al. 1986) when target distance was either increased or decreased during saccadic suppression. However, the increase and decrease in target amplitude were 4 cm and 2 cm, respectively. The smaller modifications necessary when the target distance was decreased could account for the complete correction in this condition. In the present study, the 3-cm decrease in movement amplitude found when the target distance was reduced by 4.5 cm was similar if not greater than in Pélisson et al.'s study.
Eye-related signals in the online control of arm movement amplitude
Two different oculomotor behaviours were observed when target angular distance was reduced during the saccade. In about half of the trials, a retinal error was present after the primary eye movement and a corrective saccade, in the opposite direction to the primary saccade, was necessary to foveate the displaced target. In the other trials, the primary saccade undershot the target in such a way that no corrective saccade had to be performed to bring the target onto the fovea. Results showed that arm movement endpoints were similar irrespective of whether or not a corrective saccade was present. In this case, retinal error signals after the primary saccade and/or extraretinal signals related to the corrective saccade did not result in greater correction in movement amplitude. Conversely, it is worth mentioning that the early target fovealisation in trials without corrective saccade did not result in increased movement accuracy as compared to the trials with later target fovealisation (i.e., with corrective saccades). The results of the present study therefore argue for a rapid registering of both eye position and retinal information after the primary saccade to update accordingly the internal representation of target position and the arm motor commands. This implies that both types of information are available and accurate between the primary and the corrective saccades. The importance of sampling visual feedback at the end of the primary saccade for controlling arm movement was already suggested by several authors (Goodale et al. 1986; Pélisson et al. 1986; Prablanc and Martin 1992; Vercher et al. 1994).
Hand position: vision and proprioception
An interesting observation of this study was that subjects never perceived the 4.5-cm mismatch between their actual hand position and the pointer LED indicating hand position. Rossetti et al. (1995) have shown that mismatch between visually and proprioceptively defined hand position is not perceived in peripheral vision. In the present experiment, the pointer LED position was changed with respect to the hand near mid-flight of the saccade, i.e., in peripheral vision. Towards the end of the arm movement, the pointer LED was seen in central vision and subjects still did not perceive the mismatch. In a preliminary experiment, subjects clearly detected the gap when it was present at the start of the trial and seen in central vision. It is as if subjects re-calibrated their arm position sense in a single movement through the new visual feedback of their hand position. There are reports in the literature that non-cognitive sensorimotor adaptation is more robust than adaptation that takes place through conscious processes (Ingram et al. 2000). The fact that subjects did not perceive the 4.5-cm pointer LED displacement that occurred during the saccadic suppression suggests that unconscious adaptation may also be quicker to develop. However, subjects never perceived a difference between their hand and the pointer LED positions when, after a trial with a shift in the pointer LED position, the pointer LED that corresponded to the actual hand position was first lit. This suggests that, if re-calibration of arm position sense occurred during a single trial, visual feedback of the actual hand position at the start of the trials allowed subjects to return to a normal arm position calibration. Questions related to the fact that subjects did not perceive the shift in the seen hand position that occurred during saccadic suppression are of great interest in the general field of sensorimotor control. However, further experiments that specifically address these questions using the appropriate protocols are needed.
References
Baizer JS, Bender DB (1989) Comparison of saccadic eye movements in humans and macaques to single-step and double-step target movements. Vision Res 29:485–495
Bard C, Hay L, Fleury M (1985) Role of peripheral vision in the directional control of rapid aiming movements. Can J Psychol 39:151–161
Bard C, Turrell Y, Fleury M, Teasdale N, Lamarre Y, Martin O (1999) Deafferentation and pointing with visual double step perturbations. Exp Brain Res 125:410–416
Becker W (1989) Metrics. In: Wurtz RH, Goldberg ME (eds) The neurobiology of saccadic eye movements, ch 2. Elsevier, Amsterdam, pp13–67
Becker W, Fuchs AF (1969) Further properties of the human saccadic system: eye movements and correction saccades with and without visual fixation points. Vision Res 9:1247–1258
Bekkering H, Abrams RA, Pratt J (1995) Transfer of saccadic adaptation to the manual motor system. Hum Mov Sci 14:155–164
Berkinblit MB, Fookson OI, Smetanin B, Adamovich SV, Poizner H (1995) The interaction of visual and proprioceptive inputs in pointing to actual and remembered targets. Exp Brain Res 107:326–330
Blouin J, Bard C, Teasdale N, Paillard J, Fleury M, Forget R, Lamarre Y (1993a) Reference systems for coding spatial information in normal subjects and a deafferented patient. Exp Brain Res 93:324–331
Blouin J, Teasdale N, Bard C, Fleury M (1993b) Directional control of rapid arm movements: the role of the kinetic visual feedback system. Can J Exp Psychol 47:678–696
Blouin J, Bridgeman B, Teasdale N, Bard C, Fleury, M (1995a) Visual stability with goal-directed eye and arm movements toward a target displaced during saccadic suppression. Psychol Res 58:169–176
Blouin J, Teasdale N, Bard C, Fleury M (1995b) Control of rapid arm movements when target position is altered during saccadic suppression. J Motor Behav 27:114–122
Blouin J, Gauthier GM, Vercher J-L, Cole J (1996) The relative contribution of retinal and extraretinal signals in determining the accuracy of reaching movements in normal subjects and a deafferented patient. Exp Brain Res 109:148–153
Boulinguez P, Blouin J, Nougier, V (2001) The gap effect for eye and hand movements in double-step pointing. Exp Brain Res 138:352–358
Bridgeman B, Lewis S, Heit G, Nagle M (1979) Relation between cognitive and motor-oriented systems of visual position perception. J Exp Psychol Hum Percept Perform 5:692–700
Carlton LG (1981) Visual information: the control of aiming movements. Q J Exp Psychol A 33:87–93
Desmurget M, Rossetti Y, Jordan M, Meckler C, Prablanc C (1997) Viewing the hand prior to movement improves accuracy of pointing performed toward the unseen contralateral hand. Exp Brain Res 115:180–186
Desmurget M, Pélisson D, Rossetti Y, Prablanc C (1998) From eye to hand: Planning goal-directed movements. Neurosci Biobehav Rev 22:761–788
Desmurget M, Epstein CM, Turner RS, Prablanc C, Alexander GE, Grafton ST (1999) Role of the posterior parietal cortex in updating reaching movements to a visual target. Nat Neurosci 2:563–567
Elliott D (1988) The influence of visual target and limb information on manual aiming. Can J Psychol 42:57–68
Fitts PM (1954) The information capacity of the human motor system in controlling the amplitude of movement. J Exp Psychol 47:381–391
Georgopoulos AP, Kalaska JF, Massey JT (1981) Spatial trajectories and reaction times of aimed movements: effects of practice, uncertainty, and change in target location. J Neurophysiol 4:725–743
Ghez C, Gordon J, Ghilardi MF (1995) Impairments of reaching movements in patients without proprioception. II. Effects of visual information on accuracy. J Neurophysiol 73:361–372
Gielen CCAM, van den Oosten K, Pull ter Gunne F (1985) Relation between EMG activation patterns and kinematic properties of aimed arm movements. J Mot Behav 17:421–442
Gonshor A, Malcolm R (1971) Effect of changes in illumination level on electro-oculography (EOG). Aerospace Medicine 42:138–140
Goodale MA, Pélisson D, Prablanc C (1986) Large adjustments in visually guided reaching do not depend on vision of the hand or perception of target displacement. Nature 320:748–750
Ingram HA, van Donkelaar P, Cole J, Vercher J-L, Gauthier GM, Miall RC (2000) The role of proprioception and attention in a visuomotor adaptation task. Exp Brain Res 132:114–126
Komilis E, Pélisson D, Prablanc C (1993) Error processing in pointing at randomly feedback-induced double-step stimuli. J Mot Behav 25:299–308
Lemay M, Proteau L (2001) A distance effect in a manual aiming task to remembered targets: a test of three hypotheses. Exp Brain Res 140:357–368
Martin O, Teasdale N, Simoneau M, Corbeil P, Bourdin C (2000) Pointing to a target from an upright position in human: tuning of postural responses when there is target uncertainty. Neurosci Lett 281:53–56
Messier, J., Kalaska, J.F. (1999) Comparison of variability of initial kinematics and endpoint of reaching movements. Exp Brain Res: 125:139–152
Nougier V, Bard C, Fleury M, Teasdale N, Cole J, Forget R, Paillard J, Lamarre Y (1996) Control of single-joint movements in deafferented patients: evidence for amplitude coding rather than position control. Exp Brain Res 109:473–482
Paillard J (1996) Fast and slow feedback loops for the visual correction of spatial errors in a pointing task: a reappraisal. Can J Physiol Pharmacol 74:401–417
Pélisson D, Prablanc C, Goodale MA, Jeannerod M (1986) Visual control of reaching movements without vision of the limb. II. Evidence of fast unconscious processes correcting the trajectory of the hand to the final position of the double step stimulus. Exp Brain Res 62:303–311
Prablanc C, Echallier JF, Jeannerod M, Komilis E (1979) Optimal response of eye and hand motor systems in pointing at a visual target. II. Static and dynamic visual cues in the control of hand movement. Biol Cybern 35:183–187
Prablanc C, Pélisson D, Goodale MA (1986) Visual control of reaching movements without vision of the limb. I. Role of retinal feedback of target position in guiding the hand. Exp Brain Res 62:293–302
Prablanc C, Martin O (1992) Automatic control during hand reaching at undetected two-dimensional target displacements. J Neurophysiol 67:455–469
Proteau L, Boivin K, Linossier S, Abahnini K (2000) Exploring the limits of peripheral vision for the control of movement. J Mot Behav 32:277–86
Redon C, Hay L, Velay J-L (1991) Proprioceptive control of goal-directed movements in Man, studied by means of vibratory muscle tendon stimulation. J Mot Behav 23:101–108
Rossetti Y, Desmurget M, Prablanc C (1995) Vectorial coding of movement: vision, proprioception, or both? J Neurophysiol 74:457–463
Sittig AC, Denier van der Gon JJ, Gielen CCAM (1987) The contribution of afferent information on position and velocity to the control of slow and fast human forearm movements. Exp Brain Res 67:33–40
Soechting JF, Lacquaniti F (1983) Modification of trajectory of a pointing movement in response to a change in target location. J Neurophysiol 49:548–564
Spijkers W, Spellerberg S (1995) On-line visual control of aiming movements? Acta Psychol (Amst) 90:333–48
Steyvers M, Verschueren SM, Levin O, Ouamer M, Swinnen SP (2001) Proprioceptive control of cyclical bimanual forearm movements across different movement frequencies as revealed by means of tendon vibration. Exp Brain Res 140:326–34
Turrell Y, Bard C, Fleury M, Teasdale N, Martin O (1998) Corrective loops involved in fast aiming movements: effect of task and environment. Exp Brain Res 120:41–51
van Beers RJ, Sittig AC, van der Gon JJ (1996) How humans combine simultaneous proprioceptive and visual position information. Exp Brain Res 111:253–61
van Beers RJ, Sittig AC, van der Gon JJD (1999) Localization of a seen finger is based exclusively on proprioception and on vision of the finger. Exp Brain Res 125:43–49
van der Meulen JHP, Gooskens RHJM, Denier van der Gon JJ, Gielen CCAM, Wilhelm K (1990) Mechanisms underlying accuracy in fast goal-directed arm movements in man. J Mot Behav 22:67–84.
van Sonderen JF, Gielen CCAM, van der Gon JJD (1989) Motor programmes for goal-directed movements are continuously adjusted according to changes in target location. Exp Brain Res 78:139–146
Vercher J-L, Magenes G, Prablanc C, Gauthier GM (1994) Eye-head-hand coordination in pointing at visual targets: spatial and temporal analysis. Exp Brain Res 99:507–523
Acknowledgements
This work received financial support from the Centre National de la Recherche Scientifique (CNRS—Program ROBEA) and the Université de la Méditerranée. We are especially grateful to Alain Donneaud and Georges Jimenez for their technical assistance in building the experimental set-up and to Marcel Kaszap and Thelma Coyle for programming expertise. We thank two anonymous reviewers for helpful comments made on a previous version of this paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Sarlegna, F., Blouin, J., Bresciani, JP. et al. Target and hand position information in the online control of goal-directed arm movements. Exp Brain Res 151, 524–535 (2003). https://doi.org/10.1007/s00221-003-1504-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-003-1504-7