
Abstract
We previously reported that opposite arm training improved the initial direction of dominant arm movements, whereas it only improved the final position accuracy of non-dominant arm movements. We now ask whether each controller accesses common, or separate, short-term memory resources. To address this question, we investigated interlimb transfer of learning for visuomotor rotations that were directed oppositely [clockwise (CW)/counterclockwise (CCW)] for the two arms. We expected that if information obtained by initial training was stored in the same short-term memory space for both arms, opposite arm training of a CW rotation would interfere with subsequent adaptation to a CCW rotation. All subjects first adapted to a 30° rotation (CW) in the visual display during reaching movements. Following this, they adapted to a 30° rotation in the opposite direction (CCW) with the other arm. In contrast to our previous findings for interlimb transfer of same direction rotations (CCW/CCW), no effects of opposite arm adaptation were indicated in the initial trials performed. This indicates that interlimb transfer is not obligatory, and suggests that short-term memory resources for the two limbs are independent. Through single trial analysis, we found that the direction and final position errors of the first trial of movement, following opposite arm training, were always the same as those of naive performance. This was true whether the opposite arm was trained with the same or the opposing rotation. When trained with the same rotation, transfer of learning did not occur until the second trial. These findings suggest that the selective use of opposite arm information is dependent on the first trial to probe current movement conditions. Interestingly, the final extent of adaptation appeared to be reduced by opposite arm training of opposing rotations. Thus, the extent of adaptation, but not initial information transfer, appears obligatorily affected by prior opposite arm adaptation. According to our findings, it is plausible that the initiation and the final extent of adaptation involve two independent neural processes. Theoretical implications of these findings are discussed.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Previous research indicates that practice of some novel tasks with one arm can facilitate subsequent performance using the other arm (Laszlo et al. 1970; Taylor and Heilman 1980; Elliott and Roy 1981; Parlow and Kinsbourne 1989; Marzi et al. 1991; Dizio and Lackner 1995; Imamizu and Shimojo 1995; Stoddard and Vaid 1996; Thut et al. 1996; Morton et al. 2001). The pattern of such interlimb transfer appears to depend on the arm that is initially trained. In a recent study examining the effects of opposite arm training on visuomotor adaptations, we showed that different aspects of performance transfer in different directions (Sainburg and Wang 2002). Two subject groups, one that trained using the non-dominant arm first and the other that trained using the dominant arm first, adapted to a 30° rotation in the visual display during a center-out reaching task. Opposite arm training improved the initial direction of dominant arm movements, but only the final position accuracy of non-dominant arm movements. We speculated that the pattern of interlimb transfer is dependent on the proficiency of the arm controller in question for specifying particular features of movement. In particular, the dominant arm controller appeared better adapted for controlling trajectory dynamics (Sainburg and Kalakanis 2000; Sainburg 2002). Therefore, this controller utilized opposite arm-derived information to better adapt the direction of movements in accord with the imposed visuomotor rotation. In contrast, because the non-dominant arm controller appeared well adapted for specification of final limb configuration (Sainburg 2002), opposite arm training improved the final position, but not the initial direction, of non-dominant arm movements.
One method that has been used to study the mechanisms underlying motor adaptation and neural information storage is to test whether learning of contrasting information "interferes" with prior or subsequent adaptation (retrograde and anterograde interference, respectively). For example, previous studies of dominant arm movements have shown that after adapting to a rotation of the visual display on one day, subjects partially maintained their adapted performance and readapted more rapidly when exposed to the same task the next day (Krakauer et al. 1999; Tong et al. 2002). This performance advantage, however, did not occur when subjects practiced with an oppositely rotated visual display directly following initial training on the first day. Such retrograde interference effects reveal that the oppositely directed visuomotor rotations compete for the same short-term memory resources. The opposite-rotation condition effectively "writes over" or cancels the effects of initial training. Anterograde interference has also been shown to affect subsequent adaptation, when the visuomotor rotations are oppositely rotated (Wigmore et al. 2002). Similar findings have also been shown for adaptations to novel dynamic conditions imposed by a robot arm manipulandum, or an inertial load attached eccentric to the forearm axis (Shadmehr and Brashers-Krug 1997; Shadmehr and Holcomb 1997; Krakauer et al. 1999).
We now examine whether the dominant and non-dominant arm controllers share the same short-term memory resources, by testing anterograde interference effects of learning oppositely directed rotations with the two arms. If both arms share the same short-term memory resources, we expect that information obtained by initial training with one arm should obligatorily transfer, even though that information interferes with opposite arm performance. We assume that the effects of prior training should be measurable in the performance of the very first movement trials made with the other arm. Indeed, previous studies that have examined facilitation and/or interference following adaptation to novel visuomotor or dynamic conditions have shown effects on the very first trials of the test session that follows initial training, either immediately or after some specified time delay (Sainburg and Wang 2002; Krakauer et al. 1999; Tong et al. 2002; Wigmore et al. 2002). Such effects indicate transfer of information prior to or during the initial movement preparation process. It is also possible that opposite arm training with opposing visuomotor rotations will not affect the first movement trials of subsequent opposite arm performance at all. This would suggest that during initial training with one arm, learned information is stored in a separate short-term memory cache that does not compete with opposite arm-derived information.
Prior training may alter the final extent of adaptation without affecting the trials performed early in adaptation. It has been suggested that the initial and the final phases of adaptation involve two distinct processes: algorithmic processing and automatic retrieval of performance instances from memory, respectively (Logan 1988). Thus, it is possible that the initiation and the final extent of adaptation will be differentially affected by opposite arm training. We, thus, plan to independently analyze the effects of opposite arm training both early and late in the adaptation process.
In the present study, we attempted to differentiate between possible mechanisms of interlimb transfer of training by employing a center-out reaching task that requires adaptation to novel visuomotor rotations. We examined the pattern of interlimb transfer under the condition in which the visual rotations for the two arms oppose one another.
Materials and methods
Subjects
Subjects were 14 neurologically intact right-handed adults (8 female, 6 male), aged from 18 to 40 years old. Subjects were recruited from the University community, and were paid for their participation. Informed consent was solicited prior to participation. Right handedness was assessed using the ten-item version of the Edinburgh Inventory (Oldfield 1971).
Apparatus
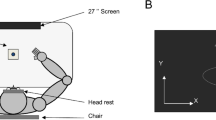
Subjects sat facing a table with either the right or left arm supported over a horizontal surface, positioned just below shoulder height, by a frictionless air jet system. A start circle, target, and cursor representing the index finger position were projected on a horizontal back-projection screen positioned above the arm. A mirror, positioned parallel and below this screen, reflected the visual display, so as to give the illusion that the display was in the same horizontal plane as the fingertip. Position and orientation of each limb segment was sampled using the Flock of Birds (Ascension-Technology) magnetic 6-DOF movement recording system. The position of the following three bony landmarks was digitized: (1) index fingertip, (2) the lateral epicondyle of the humerus, and (3) the acromion, directly posterior to the acromioclavicular joint. As sensor data was received from the Flock of Birds, the position of these landmarks was computed by our custom software. For more detailed information, see Sainburg and Wang (2002).
Experimental design
Prior to movement, one of eight targets (2 cm in diameter; 13 cm away from the starting position), presented in a pseudorandom sequence, was displayed on the horizontal tabletop. Subjects were instructed to move the finger from the starting circle (1.5 cm in diameter) to the target using a single, rapid motion in response to an auditory "go" signal. During the movement, visual feedback was provided by a screen cursor. At the end of each trial, knowledge of results was provided in the form of a circle indicating the final location of the index finger, and by points awarded for accuracy: 1 point for 2D accuracy <3 cm, 3 points for accuracy <2 cm, and 10 points for accuracy <1 cm. In order to examine adaptation to novel visual-motor transformations, the position of the cursor was rotated 30° either clockwise (CW) or counterclockwise (CCW), relative to the start circle. The experiment consisted of two sessions: baseline (no visual rotation) and exposure (visual rotation) sessions. Subjects performed two blocks of trials in each session. Half the subjects performed with the left arm first (LR), while the other half performed with the right arm first (RL). Each block comprised 192 trials, divided into 24 cycles, with each cycle containing all eight of the targets. Each block of trials was separated by a 10-min break. Table 1 shows the sequence of the experimental blocks for each group.
Data analysis
Two measures of performance were calculated: hand-path direction errors at peak tangential arm velocity (V max) and final position error. Direction error was calculated as the angular difference between the vectors defined by the target and by the hand-path position at movement start and at V max. Final position error was calculated as the 2D distance between the index finger at movement termination and the center of the target.
A repeated-measures ANOVA was conducted with Group (RL, LR) as a between-group factor, and Arm (R, L) and Target direction (eight directions) as within-group factors for each condition. Since the purpose of this study was to examine the effect of prior training of one arm on the training of the other arm, pairwise comparisons using Bonferroni/Dunn analysis were made between right arm blocks, and also between left arm blocks, performed by LR and RL groups. Transfer of learning was assessed as the difference in performance measures between like-arm blocks (1) for the first two cycles, and (2) for the last eight cycles from the exposure session to examine initial information transfer and the extent of final adaptation, respectively. According to the repeated-measures ANOVA, there was no significant interaction of Target with the other two factors for any parameter (although the main effect of Target was significant for both measures at P<0.01). Thus, the data were collapsed across eight targets and subjected to further analyses. Since the comparisons of main interest were between the same limbs of RL and LR groups, pairwise comparisons using Bonferroni/Dunn analysis only are reported below.
Part of the data from our previous study (Sainburg and Wang 2002) was reanalyzed. Whereas this data was previously analyzed only with respect to movement cycles (eight trials), we now apply a single trial based analysis. There was no overlap between the two subject groups (14 subjects in each study).
Results
Hand-paths
Figure 1A shows typical hand-paths of one representative subject from each group (RL, LR). The last cycle of the pre-exposure block (dashed) is shown in column 1, overlaid by hand-paths from the first cycle of naive performance during initial exposure to the 30° visual rotation. As expected, these paths are initially directed either CCW (Fig. 1A, top) or CW (bottom) to the target. Figure 1A, right column, shows the first cycle of that naive performance (dashed), overlaid by hand-paths from the first cycle of movement performed by the second arm following opposite arm adaptation. The effects of opposite arm adaptation should be apparent as differences in accuracy between the solid and dashed paths in column 2. As reflected by the similarity in these paths, prior opposite arm training produced no systematic difference in the first two cycles of movement for either initial direction error (P=0.25), or final position error (P=0.54), as compared with naive performance with the same hand.

A Representative hand-paths of a subject from the RL group are compared with those of a subject from the LR group to illustrate between-group differences. Dominant hand paths are shown along the top row, whereas non-dominant hand paths are shown below. Column 1 shows the last cycle of movements performed by each arm during the pre-exposure session (dashed lines), overlaid by the first cycle of naive performance by the same arm during initial exposure (solid lines). Column 2 shows the first cycle of naive performance by each arm during initial exposure (dashed lines), overlaid by the first cycle of movements performed by the same arm following opposite arm adaptation (solid lines). Effects of opposite arm adaptation are reflected by differences in accuracy between solid and dashed lines in column 2. B Mean performance measures, direction error at V max (column 1) and final position error (column 2), are shown for non-dominant and dominant arms separately. Every data point shown on the X-axis represents the average of two consecutive cycles across all subjects (mean ± SE). Performance measures for naive performance (open circles) and performance following opposite arm adaptation (filled circles) are shown separately. Differences in performance between groups represent the effects of opposite arm training. **significant at P<0.01
Mean direction and final position errors across subjects
Figure 1B shows mean (±SE) direction errors and final position errors, averaged across every two cycles of movement during exposure sessions (a single epoch). Transfer of learning was assessed in two ways: means (1) for the first two cycles, and (2) for the last eight cycles from the exposure session to examine initial information transfer and extent of final adaptation, respectively. With regard to initial information transfer, neither facilitation nor interference was observed in the first epoch (i.e., two cycles) for either arm [P=0.25 (dominant arm) and 0.20 (non-dominant arm) for direction errors; P=0.54 (dominant arm) and 0.23 (non-dominant arm) for final position errors]. However, the extent of final adaptation for the dominant arm was negatively affected by opposite arm training, as reflected by significant mean differences in the final epochs for both measures (P<0.001).
Trial-by-trial analysis
We previously showed that opposite arm training influences the accuracy of the first two cycles of movement when the direction of rotation is similar between the arms (Sainburg and Wang 2002). However, with opposing rotations, prior opposite arm training does not appear to affect the accuracy of these initial trials. This finding implies that the nervous system must probe the current movement context to determine whether to use opposite arm derived information. We thus hypothesized that the very first trial of movement, following opposite arm training, must represent a probing trial, and thus should not be influenced by opposite arm training. To test this hypothesis, it was necessary to conduct a trial based analysis on data from our previous study, in which non-dominant arm training with the same rotation was shown to substantially improve the direction of dominant arm. The data was previously analyzed only with respect to movement cycles (Sainburg and Wang 2002). We now compare this data to that from the current study. In order to focus on the very first movement, we extracted only those trials performed toward target 1 (the first movement of all sessions). It should be emphasized that effects of opposite arm training over the first few cycles of movement were only observed in the direction errors of dominant arm movements and in the final position errors of non-dominant arm movements (Sainburg and Wang 2002). We thus restrict this analysis to the dominant arm with respect to direction errors, and the non-dominant arm with regard to final position errors.
Figure 2A shows the mean initial direction errors made with the dominant arm under naive conditions (open circles) and following opposite arm adaptation (closed circles) for movements made to target 1 (top) and to targets 2–8 (bottom). Data from cycles 1, 2, 3–5, and 22–24 are shown to represent the time course of adaptation. Data from our previous study, in which the direction of rotations was the same, is shown on the left, whereas the right column shows data from the current study, when opposite arm training was done with an oppositely directed rotation. Notice that regardless of rotation direction, the very first movement made toward target 1 was not significantly different from that of naive performance (same rotation condition: P=0.22; opposite rotation condition: P=0.72). Whereas opposite arm training may have minimally reduced the direction error at the first trial for target 1, this was not a significant reduction, and the major effect of opposite arm training occurred after this first trial. Following the initial trial, a rapid drop in direction errors occurred between trials one and two. As a result, subsequent trials toward targets 2–8, as well as toward target 1, were substantially more accurate than those of naive performance, suggesting that opposite arm-derived information about the visuomotor rotation was rapidly downloaded to the dominant arm controller. Following the initial trial toward target 1, the errors in subsequent movements toward targets 2–8 remained slightly higher than those in the movement toward target 1. This most likely reflects, on average, larger target direction-dependent effects on initial direction errors for these targets, as previously detailed by Gordon et al. (1994). The fact that target 1 errors were reduced to nearly their final value after the first trial was a substantial finding across all subjects tested. In contrast, when the direction of rotation opposed that of opposite arm training (right), improvements in direction error following the first trial toward target 1 approximated that of naive performance. However, subsequent movements toward targets 2–8 showed a significant reduction in accuracy, relative to naive performance, suggesting interference with the learning process itself.

Direction errors (A) and final position errors (B) are shown in a trial-by-trial basis for the same- (unpublished data from Sainburg and Wang 2002) and opposite-rotation conditions separately. Trials in which the arm moved toward Target 1 are presented in rows 1 and 3; those moved toward other targets in rows 2 and 4. Data points on the X-axis represent the average of given trial(s) across all subjects (mean ± SE). Errors for naive performance (open circles) and the performance following opposite arm adaptation (filled circles) are shown separately. *significant at P<0.05
Figure 2B shows analogous data for final position errors of non-dominant arm movements under naive conditions (open circles) and following opposite arm training (close circles) with either the same rotation (left) or the opposite rotation (right) conditions. The very first trial of movement toward target 1 was the same for naive performance and following opposite arm training, regardless of rotation condition (same rotation: P=0.35; opposite rotation: P=0.74). After this trial, the facilitating effect of opposite arm training became apparent between cycles 3 and 5, but only when the opposite arm was trained with the same rotation condition. Interestingly, for movements toward targets 2–8, a trend (not significant) toward improvements in performance following opposite arm training appeared to occur under both training conditions. This is evidenced by the slightly lower values for opposite arm-trained errors in the bottom graphs of Fig. 2B. This suggests that non-dominant arm improvements in final position error were not specific to the trained condition.
Discussion
In this study, we tested interlimb transfer of novel visuomotor rotations that were in opposing directions. Comparisons were made between naive performance and that following opposite arm training. Our findings indicated no effect of opposite arm training on the direction or final position accuracy of the initial 16 trials of movement. This leads to the hypothesis that transfer of opposite arm-derived information is not obligatory. However, in a previous study, when the rotations were the same for both arms (Sainburg and Wang 2002), substantial transfer of learning across the arms was observed in the first two cycles (16 trials) of movement. Taken together, these findings suggest that the CNS is able to selectively use opposite arm-derived information as appropriate to current task conditions. Such selectivity requires that the controller probe current movement conditions prior to utilizing or rejecting opposite arm-derived information, and thus predicts that the very first trial of movement, following opposite arm training, should not differ from that of naive performance. We tested this prediction both in our current data, and in data collected in our previous study, in which the direction of visuomotor rotations was the same for both arms. The results indicated that, regardless of whether the rotation condition was the same or different than that of opposite arm training, the direction of the first trial of movement was always the same as that of naive performance. When the rotation was the same as that of opposite arm training, dominant arm movement direction was improved substantially on the second trial of movement, as though opposite arm information was immediately downloaded after the first trial. When the rotation was different than that of opposite arm training, neither the dominant nor the non-dominant arm showed changes in initial direction errors, until late in the adaptation process, ultimately limiting the extent of final adaptation. In neither case did the non-dominant arm show effects of opposite arm training on movement direction errors.
When opposite arm training was done with an opposing rotation, no significant differences in final position accuracy occurred in non-dominant arm performance. This is surprising because we previously showed that when the rotation was the same as that of opposite arm training, improvements in final position accuracy did occur for the non-dominant arm (Sainburg and Wang 2002). Our trial based analysis of that data showed that this improvement did not occur until after the first trial. This supports the hypothesis that transfer of opposite arm-derived information can be selective. Interestingly, for the dominant arm, when opposite arm training was done with an opposing rotation, slight decrements in final position accuracy occurred late in the course of adaptation. This appears contradictory to our previous findings, which indicated no effect of opposite arm training on the final position accuracy of the dominant arm. However, we expect that the decrement in dominant arm final position errors that arose late in adaptation were a direct reflection of the initial direction errors associated with these movements. In fact, we previously showed that opposite arm training improved non-dominant arm final position accuracy, but not initial direction accuracy. Thus, corrective mechanisms that compensate for initial direction errors appear to be selectively enhanced by opposite arm training for the non-dominant arm only. Given this finding, it is not surprising that opposite arm-imposed decrements in dominant arm directional errors were associated with uncompensated increases in final position errors. Such differences in the pattern of interlimb transfer for initial direction and final position errors provide further support for the hypothesis that these two parameters may be specified independently during the movement preparation process (Hirayama et al. 1993; Gottlieb 1996; Sainburg and Wang 2002).
Two mechanisms that may underlie interlimb transfer were proposed in the "Introduction": a shared memory model and a separate memory model. In the case of oppositely directed visual rotations, the shared memory model predicts interference from opposite arm training for the very first cycles of movement (Krakauer et al. 1999; Tong et al. 2002; Wigmore et al. 2002). Our results indicate that opposite arm training did not significantly affect the first movements made during subsequent performance, confirming that interlimb transfer of opposite arm-derived information is not obligatory. This supports the idea that each arm controller represents visuomotor adaptations independently. Our findings also indicated that the effects of opposite arm training did not occur until after the very first movement trial, suggesting that this trial is used to probe current task conditions. Interestingly, we observed a detrimental effect of opposite arm training on the later phase of adaptation, when the visuomotor rotations were directed oppositely between the limbs.
Our findings support the idea that the initiation and the final extent of adaptation involve two independent neural processes. This idea is consistent with the instance theory of automatization, which proposes that the initial phase of adaptation is dominated by algorithmic processing, whereas the final phase is dominated by the automatic retrieval of performance instances from memory (Logan 1988). According to this hypothesis, algorithmic control dominates early in the learning process when experience with the task is limited. However, as more performance instances are encoded to memory, the more rapid process of instance retrieval dominates late in the learning process. This theory is based on the assumptions that: (1) algorithmic learning is under executive control and thus non-obligatory, and (2) that instance encoding and retrieval is an obligatory consequence of attention.
Our results indicating transfer of initial learning under the same rotation condition, but not under the opposite rotation condition, appear compatible with Logan's instance theory. Early in performance, the controller that is being used may access and utilize the algorithm derived during opposite arm performance. When the rotations for the limbs were compatible, the opposite arm-derived algorithm was applicable to the current condition, thus resulting in facilitation of performance in the initial phase of learning. Despite the advantage of using the opposite arm-derived algorithm, accuracy remained incomplete because limb-specific instances had not yet been stored in memory. Under the incompatible rotation condition, the opposite arm-derived algorithm was not utilized because it was not applicable to the current conditions. According to Logan's theory, algorithmic control is non-obligatory and subject to such executive decisions. This theory may also help explain the interference observed in the level of final adaptation under the incompatible rotation condition. Late in learning, after a number of performance instances had been encoded, two sets of instances were available: one from the opposite arm training, and the other from the subsequent learning. Because instance retrieval is not under executive control, incompatible instances cannot be rejected. The influence of incompatible instances from opposite arm training, thus, reduces the likelihood of retrieving compatible instances, and results in detriments in performance. Whereas the current data indicate differential effects of opposite arm training on the early and late phases of adaptation, we are unable, in this study, to definitively determine whether these differences correspond to the algorithmic and instance retrieval processes previously described by Logan (1988).
It is plausible that the mechanisms underlying interlimb transfer may depend on the nature of the transformations underlying the process of adaptation. This is because different types of learning, for example, adaptation to visuomotor, as compared with dynamic transformations, may be subserved by distinct neural processes. In a previous study, Krakauer et al. (1999) showed that adaptations to visual distortions and to dynamic perturbations do not interfere with one another. Consistent with this idea, we recently showed that both arms show equivalent adaptation to visuomotor rotations, but that the dominant arm shows more extensive adaptation to a novel inertial load than does the non-dominant arm (Sainburg 2002). Thus, dominant and non-dominant arm performance is differentiated by dynamic adaptation, but not visuomotor adaptation. The idea that interlimb transfer in adaptation to dynamic loads is different from the visuomotor adaptation studied here is supported by the findings of Dizio and Lackner (1995), who demonstrated an obligatory interlimb transfer of dynamic information, as reflected by the presence of aftereffects following opposite arm adaptation to Coriolis force perturbation. In addition, Criscimagna-Hemminger et al. (2003) showed that adaptation to velocity-dependent forces, imposed by a hand-held robot manipulandum, transferred to improve opposite arm adaptation only from the dominant to the non-dominant arm. This data appears inconsistent with the current findings and may result from differences in how dynamic and visuomotor adaptations are represented in the CNS. It should be noted, however, that Tong et al. (2002) recently reported interference effects between dynamic and visuomotor adaptations, calling into question the independence of these mechanisms. Further research is necessary to distinguish whether interlimb transfer of adaptation to dynamic conditions is similar to the visuomotor adaptations studied here.
References
Criscimagna-Hemminger SE, Donchin O, Gazzaniga MS, Shadmehr R (2003) Learned dynamics of reaching movements generalize from dominant to nondominant arm. J Neurophysiol 89:168–176
Dizio P, Lackner JR (1995) Motor adaptation to Coriolis force perturbations of reaching movements: endpoint but not trajectory adaptation transfers to the nonexposed arm. J Neurophysiol 74:1787–1792
Elliott D, Roy EA (1981) Interlimb transfer after adaptation to visual displacement: patterns predicted from the functional closeness of limb neural control centres. Perception 10:383–389
Gordon J, Ghilardi MF, Ghez C (1994) Accuracy of planar reaching movements. I. Independence of direction and extent variability. Exp Brain Res 99:97–111
Gottlieb GL (1996) Muscle compliance: implications for the control of movement. Exerc Sport Sci Rev 24:1–34
Hirayama M, Kawato M, Jordan MI (1993) The cascade neural network model and a speed-accuracy trade-off of arm movement. J Motor Behav 25:162–174
Imamizu H, Shimojo S (1995) The locus of visual-motor learning at the task or manipulator level: implications from intermanual transfer. J Exp Psychol Hum Percept Perform 21:719–733
Krakauer JW, Ghilardi MF, Ghez C (1999) Independent learning of internal models for kinematic and dynamic control of reaching. Nat Neurosci 2:1026–1031
Laszlo JI, Baguley RA, Bairstow PJ (1970) Bilateral transfer in tapping skill in the absence of peripheral information. J Motor Behav 2:261–271
Logan GD (1988) Toward an instance theory of automatization. Psychol Rev 95:492–527
Marzi CA, Bisiacchi P, Nicoletti R (1991) Is interhemispheric transfer of visuomotor information asymmetric? Evidence from a meta-analysis. Neuropsychologia 29:1163–1177
Morton SM, Lang CE, Bastian AJ (2001) Inter- and intra-limb generalization of adaptation during catching. Exp Brain Res 141:438–445
Oldfield RC (1971) The assessment and analysis of handedness: the Edinburgh Inventory. Neuropsychologia 9:97–113
Parlow SE, Kinsbourne M (1989) Asymmetrical transfer of training between hands: implications for interhemispheric communication in normal brain. Brain Cogn 11:98–113
Sainburg RL (2002) Evidence for a dynamic-dominance hypothesis of handedness. Exp Brain Res 142:241–258
Sainburg RL, Kalakanis D (2000) Differences in control of limb dynamics during dominant and nondominant arm reaching. J Neurophysiol 83:2661–2675
Sainburg R, Wang J (2002) Interlimb transfer of visuomotor rotations: independence of direction and final position information. Exp Brain Res 145:437–447
Shadmehr R, Brashers-Krug T (1997) Functional stages in the formation of human long-term motor memory. J Neurosci 17:409–419
Shadmehr R, Holcomb HH (1997) Neural correlates of motor memory consolidation. Science 277:821–825
Stoddard J, Vaid J (1996) Asymmetries in intermanual transfer of maze learning in right- and left-handed adults. Neuropsychologia 34:605–608
Taylor HG, Heilman KM (1980) Left-hemisphere motor dominance in righthanders. Cortex 16:587–603
Thut G, Cook ND, Regard M, Leenders KL, Halsband U, Landis T (1996) Intermanual transfer of proximal and distal motor engrams in humans. Exp Brain Res 108:321–327
Tong C, Wolpert DM, Flanagan JR (2002) Kinematics and dynamics are not represented independently in motor working memory: evidence from an interference study. J Neurosci 22:1108–1113
Wigmore V, Tong C, Flanagan JR (2002) Visuomotor rotations of varying size and direction compete for a single internal model in motor working memory. J Exp Psychol Hum Percept Perform 28:447–457
Author information
Authors and Affiliations
Corresponding author
Additional information
This research was supported by National Institutes of Health grant # R01HD39311
Rights and permissions
About this article
Cite this article
Wang, J., Sainburg, R.L. Mechanisms underlying interlimb transfer of visuomotor rotations. Exp Brain Res 149, 520–526 (2003). https://doi.org/10.1007/s00221-003-1392-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-003-1392-x