
Abstract
The present study investigates the coding of positions reached in a two-dimensional space by populations of muscle spindle afferents. The unitary activity of 35 primary muscle spindle afferents originating from the tibialis anterior, extensor digitorum longus, extensor hallucis longus, and peroneus lateralis muscles were recorded from the common peroneal nerve by the microneurographic technique. The steady mean frequency of discharge was analyzed during 16 passively maintained positions of the tip of the foot. These positions were equally distant from and circularly arranged around the "neutral" position of the ankle. The results showed that a same position of the foot was differently coded depending on whether it was maintained for several seconds or whether it was attained after a movement. Muscle spindle activity was increased or decreased, respectively, when the previous movement lengthened or shortened the parent muscle; the magnitude of change in activity depended on the amount of lengthening or shortening in relation to movement direction. Each muscle surrounding the ankle joint was shown to encode the different spatial positions following a directional tuning curve. Data were analyzed by using the "neuronal population vector model". This model consists of calculating population vectors representing the mean contribution of each muscle population of afferents to the coding of a particular position, and by finally calculating a sum vector. The direction of the sum vector was shown to accurately describe the direction of a given maintained position compared to the initial position. We conclude that muscle spindle position coding is based on afferent information coming from the whole set of muscles crossing a given joint. A given spatial position is associated with a stable muscle afferent inflow where each muscle makes an oriented and weighted contribution to its coding.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
Position sense probably relies on information coming from different sensory sources such as muscle, skin, and joints (for review see Gandevia et al. 1992). Evidence for the importance of muscle proprioceptive inputs in position sense has been provided by studies in which the sense of static position was differentiated from movement sense by analyzing the minimum difference in static joint position when the joint was displaced too slowly for the movement to be perceived (Horch et al. 1975; Clark et al. 1985, 1986; Taylor and McCloskey 1990, 1992; Cordo et al. 2000). In these conditions position sense was altered by nerve blocks that affected muscle spindle afferents, leaving skin and joint mechanisms unaffected (Clark et al. 1985, 1986).
The role played by muscle proprioceptive input in position coding was also attested by unitary recording of muscle spindle afferents in animals, and by microneurographic studies in humans: both revealed a simple linear function between muscle spindle impulse frequency and joint angle in relaxed muscle (Granit and Homma 1959; Botterman and Eldred 1982; Vallbo 1974). However, such a simple relationship disappears as soon as the position is voluntarily attained. Indeed, the fusimotor drive that accompanies an active position holding changes muscle spindle output in a way that abolishes position response of muscle spindles in the prime movers (Vallbo et al. 1981; Hulliger et al. 1982).
The difficulty introduced by fusimotor output in the interpretation of muscle spindle discharges, and that the central nervous system (CNS) has to face in order to know body posture, has led some authors to introduce the hypothesis that corollary discharges may be used to extract the part due to voluntary drive in the muscle spindle activity (Matthews 1982; McCloskey et al. 1983; Proske et al. 2000). Other studies tend to give a major role to proprioceptive information coming from the antagonist/stretched muscle not submitted to a fusimotor drive (Capaday and Cooke 1981; Roll and Vedel 1982; Inglis and Frank 1990; Inglis et al. 1991; Wise et al. 1998). Finally, other psychophysical as well as microneurographic studies have shown the importance of both agonist and antagonist muscle spindle output in the sense of position and movement (Gandevia et al. 1983; Gilhodes et al. 1986; Ribot-Ciscar and Roll 1998). However, most of the articulations are crossed by more than two muscles, and the relationship between spindle discharge and joint angle is probably particular to each muscle crossing the joint. So the question is how this ensemble of information is used by the CNS to extract position information.
Recently we have shown that the parameters of multidirectional ankle joint movements (direction and velocity) are accurately encoded when all the proprioceptive information from all the muscles involved in the movement is taken into account (Bergenheim et al. 2000; Roll et al. 2000; Ribot-Ciscar et al. 2002). This was shown by the use of the "neuronal population vector model", initially applied at the level of cortical cells (Georgopoulos et al. 1983, 1984; Kalaska et al.1983; Kalaska and Hyde 1985; Schwartz 1993). This model has two basic features well adapted to analyzing multipopulation coding of movements and positions by muscle spindles. The first is the fact that, although muscle spindles belonging to one particular muscle respond to a certain range of directions of stretching movements, named the "preferred sensory sector", they are more sensitive to one particular direction called the "muscle preferred sensory direction" (Bergenheim et al. 2000). The vector model takes into account this directional sensitivity since each muscle proprioceptive message is represented by a population vector whose direction corresponds to the muscle preferred sensory direction and whose length is the mean afferent firing rate. Secondly, the hypothesis we put forward is that proprioceptive coding of movements and positions relies on proprioceptive information arising from the whole set of muscles surrounding a joint. The vector model presents a simple means of processing all muscles' weighted and directional proprioceptive contribution to the coding by simply calculating a sum vector that corresponds to the sum of all the muscle population vectors. Using this model, we previously showed that the direction of any movement trajectory could be accurately described by the direction of the sum vector calculated from the muscle spindle afferent responses of the six agonist/antagonist ankle muscles (Bergenheim et al. 2000; Roll et al. 2000), and that the length of the sum vector informs about the velocity of the movements (Ribot-Ciscar et al. 2002). Such an encoding by the ensemble of muscle spindle data was then confirmed in active conditions at the level of the human wrist (Jones et al. 2001).
In the present study, we focused on muscle spindle position sensitivity by following the general idea that to any position in space there corresponds a particular landscape of proprioceptive activity coming from the whole set of muscles surrounding the ankle joint, and that it is by taking into account all this information that the attained point may be accurately encoded in space.
More precisely, we analyzed the muscle spindle resting activity during passively maintained postures of the tip of the foot, equally distant from and circularly arranged around the same starting position of the ankle joint. Afferents were grouped according to the parent muscle in order to obtain a mean profile of populations of afferents for each muscle surrounding the ankle joint. Our hypothesis was that each muscle encodes static positions in its own manner, depending on the biomechanically inferred length changes of the parent muscle, and that position coding relies on the simultaneous processing of the information from populations of muscle spindles originating in all the muscles acting on the joint. A vector analysis approach, similar to that used in previous studies to analyze muscle spindle movement coding, was undertaken to test this hypothesis.
Material and methods
The experiments were conducted on 16 healthy subjects between 22 and 28 years of age. All the subjects had given their informed consent as required by the Helsinki Declaration. The study was approved by the local ethics committee (CCP-PRB, Marseille I). The activities of single muscle spindle primary endings (n=35) originating from the tibialis anterior (TA, n=13), the extensor digitorum longus (EDL, n=14), the extensor hallucis longus (EHL, n=4), and the peroneus lateralis (PL, n=4) muscles were recorded from the common peroneal nerve by the microneurographic technique (see e.g., Vallbo and Hagbarth 1968; Bergenheim et al. 1999).
Experimental set-up and data recording
The subjects were comfortably seated in an armchair, with their legs positioned in cushioned grooves so that a standardized relaxed position could be maintained throughout the experiment without any muscular activity occurring. The knee joint was at an angle of about 120–130°. The right foot was placed on a stationary pedal. The left foot was attached to a movable pedal connected to a computer-controlled machine allowing the tip of the foot to be placed in various positions in a two-dimensional space in a controlled fashion.
More precisely, the machine (Rematique, Saint-Etienne, France) has a metal rod that moves freely and smoothly in a two-dimensional plane, and that can be freely rotated around its own axis (360°). The lower end of the pedal rests on a ball joint (see enlargement in Fig. 1A). As the metal rod moves in the two-dimensional frontal plane of the machine, it is allowed to slide slightly under the pedal. This means that a downward movement on the frontal plane of the machine (i.e., 90° in Fig. 1B) creates a plantar flexion of the ankle joint. A sideward movement to the left (i.e., 180° in Fig. 1B) results in an eversion and not a translation of the foot. The center of rotation of the foot was adjusted and aligned with the center of rotation of the ankle joint.

Experimental set-up. A Position of the subject and computer-controlled machine for bringing the tip of the left foot to different positions located in a two-dimensional space. B The 16 tested positions were equidistant from and circularly arranged around the same starting position. The 90° position corresponds to a plantar flexion, 270° to a dorsiflexion. C Example of a recording of a muscle spindle primary ending originating from the tibialis anterior (TA) muscle. The upper diagram shows the instantaneous frequency of the response, the middle diagram shows the original recording, and the lower diagram shows the X and Y co-ordinates of the change in position. Initially lying in the same starting position (Home), the tip of the foot was passively brought to a differently oriented position (Target, 135° in this example), maintained such for 2 s, and then brought back to the starting position (Return Home). For the further analysis, the mean frequency of discharge of the unit was determined during the three 1-s time windows indicated by vertical bars
The various positions tested were circularly arranged around the same starting position and had the same amplitude (25 mm at the tip of the foot). They were attained by passive ramp-and-hold movements in 16 directions (see Fig. 1B). The various positions were attained in a randomized manner.
Single-unit recordings were performed using insulated metal microelectrodes (Frederick Haer & Co., Bowdoinham, ME, USA; impedance 500 kΩ to 1 MΩ tested at 1 kHz with a tip diameter of about 5–10 µm). The electrode was manually inserted percutaneously at the level of the fibular head. The recordings were continuously monitored on an oscilloscope and a loudspeaker. Single units were isolated by adjusting the position of the microelectrode in minute steps. The neural activity was amplified (×10,000) using a 300–3000 Hz band-pass to ensure an optimal signal-to-noise ratio.
The afferents were classified as probable primary muscle spindle afferents on the basis of (1) their high dynamic sensitivity to passive muscle stretch, (2) their silence during passive muscle shortening, (3) their high sensitivity to mechanical vibration, and (4) their response to small movement amplitude. The present set of criteria leaves little chance of misclassifying Golgi tendon organs, but it is impossible to totally exclude the possibility that some of the data may have been obtained from secondary endings. Particular care was paid to defining the muscle of origin of each afferent by manually pressing the tendon of the different muscles. The absence of muscular activity was monitored throughout the experiments by recording surface electromyographic activity of the receptor-bearing muscle.
Data analysis
For each afferent, the mean frequency of discharge was calculated during three 1-s windows (see Fig. 1C): (1) at the starting position named "home" position, (2) at each final position named "target" position and 1 s after the change in position had occurred in order for the afferent to completely adapt, and (3) at the return to the starting position named "return home". These values were averaged for the whole population of afferents belonging to each recorded muscle.
These data were analyzed by using the neuronal population vector model (see e.g., Georgopoulos 1990). This model is based on the idea that the neuronal coding can be analyzed in terms of a series of population vectors and by finally calculating a sum vector. To apply this model, it was first necessary to test whether the mean directional tuning curves of each population of afferents of each muscle were cosine-shaped. A directional tuning curve means that the mean activity of a population of afferents of a particular muscle varies with the direction of the change in position (see Fig. 3). The cosine shape of these tuning curves was tested by multiple regression analysis applied to find the constants b 0, b 1, and b 2 for the tuning equation:
where F corresponds to the discharge frequency, b 0 is the mean of rates found in change in position to the 16 targets, b 1 is the y component of the maximum discharge in the preferred direction, b 2 is the x component of the maximum discharge, and θ is the angle (direction) of the tested change in position.
The neuronal population vector model consists in calculating a "population vector" that represents the mean contribution, in position coding, of all the muscle spindle afferents within one directionally tuned muscle. More precisely, the length of the population vector is given by the averaged mean frequency of discharge calculated for all the afferents within one particular muscle, and the direction of the population vector corresponds to the preferred sensory direction of the muscle under consideration (see Bergenheim et al. 2000). Finally, we calculate a sum vector that corresponds to the sum of all these muscle population vectors. This calculation was repeated for all the Target positions and for all the muscles.
Note that since the present study was aimed at analyzing the data with respect to population coding, it was important to take into account the whole set of proprioceptive information coming from the totality of the muscles surrounding the ankle joint. However, two of the ankle extensor muscles are not accessible from common peroneal nerve recording, namely the gastrocnemius soleus (GS) and tibialis posterior (TP). As in our previous works, the population vectors of these two muscles were deduced by modeling their preferred sensory direction and their mean frequency of discharge, based on the effects of the vibration-induced illusions and the data from the template muscles. In brief, the preferred sensory direction of each muscle was taken to be the direction of the illusory movement induced by vibration of the tendon of the muscle under consideration, and then the response of the TP muscle was modeled on the basis of the response of the EDL muscle (+157.5 phase shift), and the response of the GS muscle was based on that of the EHL (−157.5 phase shift) (see Bergenheim et al. 2000).
A circular statistical analysis (V-test, Batschelet 1981) was carried out to test whether the sum vectors had a significant tendency to point in the direction of the Target position relative to the Home position.
Results
The steady mean frequency of discharge of 35 muscle spindle primary afferents was analyzed through 16 maintained target positions equally distant from and circularly around the "neutral position" of the ankle. The different positions were attained by movement of the ankle joint imposed in a two-dimensional plane.
Influence of hysteresis on joint position coding
Each change of position began from the same starting point, named home position. The home position was not totally neutral with both muscle groups of the anterior and posterior parts of the leg equally stretched. In fact, the mean spontaneous frequency of discharge of all muscle spindles belonging to the ankle flexor muscles was slightly higher than that of the ankle extensor muscles, i.e., 7.7±0.6 and 6.0±0.3 impulses/s, respectively (mean ±SD).
The home position may be expected to be encoded in the same manner by muscle spindle afferents whether this position is maintained for several seconds (Home on Fig. 1C) or re-attained after a movement has occurred (Return Home on Fig. 1C). In fact, muscle spindle activity differed in these two cases and the difference depended on whether this position was re-attained after a movement that stretched or shortened the parent muscle. Moreover, the movement that brought back the tip of the foot to home position influenced muscle spindle activity differently depending on its direction. This is illustrated in Fig. 2B, which gives the mean frequency of discharge of the populations of muscle spindle afferents belonging to the ankle flexor (squares) and extensor (circles) muscles in the home position re-attained after differently oriented passive movements (return home). The far right points on Fig. 2B give the spontaneous muscle spindle activity (mean ±SD) for each muscle group in the home position, i.e., before any movement occurred.

Influence of the direction of the returning movement on muscle spindle position coding. A The foot was initially at the Home position (home data); it was passively brought to one of the 16 differently localized targets (solid circles) and then brought back to the home position (Return-Home data). This was repeated for each target. The diagram on the right indicates the two time windows for which the mean activity of each afferent was determined. B The graph illustrates the mean discharge frequency of the ensemble of muscle spindle afferents belonging to the ankle flexor (squares) and extensor muscles (circles) at the Return-Home position depending on the direction of the returning movement (polynomial regression lines were fitted to the data), and at the Home position (far right points, mean ±SD). Note that the same Home position which was re-attained from differently oriented movements was differently coded, i.e., the activity increased after movements that stretched the parent muscles and decreased after movements that shortened the parent muscles; the amount of change in muscle spindle activity depended on the amount of change in length for each muscle group
As can be seen in Fig. 2B, the mean discharge rates of the populations of afferents decreased when the home position was re-attained after a movement that shortened the parent muscles, and they increased after a movement that stretched the parent muscles, i.e., for the ankle flexor muscles, the activity decreased when returning from positions located in the 0–180° sector and increased in the 200–337° sector, and inversely for the ankle extensor muscle. Moreover, the amount of decrease or increase in activity varied with the direction of the returning movement, that is with the amount of shortening or stretching of the parent muscles.
That the two antagonist muscle groups were influenced by the previous movement in opposite ways, i.e., a movement direction that caused a maximum increase in the mean activity of the ankle extensor muscles caused a maximum decrease in the antagonist muscle group, suggests that it is important to take into account both the agonist and antagonist muscle groups in order to minimize the influence of the positioning movement on muscle spindle activity.
Muscle spindle directional tuning during position holding
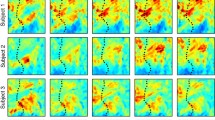
Most muscle spindle afferents exhibited spontaneous activity at the home position; when the tip of the foot was brought to target positions in the two-dimensional space that induced stretching or shortening of the parent muscle this steady activity was increased or decreased, respectively. This is illustrated by Fig. 3, which gives the mean activities at each target position for the whole sample of muscle spindle afferents and for each of the tested muscles. As can be seen, since the different targets are circularly arranged around the home position, the same change in foot position was differently coded by each muscle depending on the spatial orientation of the change in position and by all the muscles for the same orientation.

Mean discharge frequency of the whole sample of muscle spindle afferents for each differently oriented and maintained target position and for each recorded muscle (EDL extensor digitorum longus, EHL extensor hallucis longus, TA tibialis anterior, PL peroneus lateralis). The direction of the target relative to the home position is given in abscissa. Each of the muscle spindle populations coded the different positions according to a cosine tuned function, whose equation and coefficient of determination are given on top of each graph
More precisely, the mean frequency of discharge of the whole population of afferents belonging to a particular muscle varied in a sinusoidal manner with the direction of the change of position by following a cosine function, whose equation is given on top of each graph of Fig. 3. The preferred sensory directions of each muscle, i.e., the maximum of the cosine function, were the same as those determined for the movement phase of oriented straight-line movements (Bergenheim et al.2000). The very good sinusoidal fit (see R 2 on Fig. 3) legitimized the use of the neuronal vector model to investigate muscle spindle position coding.
The neuronal population vector model as a means of describing the muscle spindle position coding
According to the neuronal vector model (see Georgopoulos et al. 1983), a population vector was computed for each muscle and for each target position. For each target position, the length of a particular population vector corresponded to the mean frequencies of discharge for the whole sample of afferents of one particular muscle, and its direction was that of the preferred sensory direction of the muscle under consideration. Then, a sum vector corresponding to the sum of all these weighted population vectors was calculated (see Fig. 4B).

The neuronal population vector model. A Each diagram gives the result in one maintained position (only eight targets are illustrated). The origin point of the vectors represents the target. Thin lines correspond to the population vector of each muscle, i.e., the direction of each vector corresponds to the preferred sensory direction of the muscle and the length corresponds to the mean firing rate of the population of afferents of that muscle. Bold lines give the sum vector of all six population vectors. The central diagram gives the mean activity of each muscle population at home position. B The diagram on the left gives the name of each population vector (TA tibialis anterior, EHL extensor hallucis longus, EDL extensor digitorum longus, PL peroneus lateralis, GS gastrocnemius soleus, TP tibialis posterior), and on the right is illustrated how the sum vector is calculated for the target at 45° from home position
This analysis showed that the direction of the sum vector was a good predictor of the direction in which the target position was spatially located relative to the home position. This is illustrated by Fig. 4A, in which the muscle spindle population vectors for each muscle are indicated by thin lines and the sum vector is illustrated by bold lines (eight of the tested target positions are illustrated). The statistical analysis clearly showed that the sum vectors pointed in the actual direction of the target position relative to the home position (u=5.13, P<0.0001, V-test).
Discussion
The present results showed that the population of muscle spindle afferents of each muscle surrounding the ankle joint encodes different spatial positions of the foot, following a directional tuning curve that could be accounted for by a particular cosine function centered on the muscle preferred direction. Hence, the position can be derived unambiguously only if the patterns of activity of all the muscle populations are considered. This was verified by using the vector population model and by showing that the direction of the resultant sum vector was a good predictor of the direction of the change in position relative to the home position.
Proprioceptive messages arising from only one muscle are not sufficient for position coding
Numerous studies have suggested that proprioceptive messages coming from the antagonist/stretched muscle play a major role in position coding. This role has been assessed in particular by experiments using mechanical vibration, which is a powerful activator of muscle spindle primary endings (Roll et al. 1989), and which induces illusions of movement and of position changes. For example, vibration of the antagonist alters the attainment of target positions whereas vibration of the agonist does not (Capaday and Cooke 1981, 1983; Inglis and Frank 1990; Inglis et al. 1991). However, the absence of alteration by agonist vibration may be explained by the absence of vibratory response of muscle spindles due to their unloading in the shortening muscle, and thus do not rule out the possibility that the agonist muscle contributes to position coding. Gilhodes et al. (1986) showed the role played by the coupling of agonist/antagonist muscles in experiments in which the two muscles were simultaneously vibrated. They showed that whereas differences in the frequency applied to each muscle led to specifically oriented illusions of movement, co-vibration at the same frequency resulted in a stationary sensation.
More recently, the role played by proprioceptive messages in position coding was also extended to the ensemble of synergistic muscles in a motor coordination task that required perception of joint velocity and dynamic position of the human wrist (Verschueren et al. 1998). It was shown that vibration of combinations of wrist extensors resulted in undershoot errors that were clearly larger than the errors induced by vibrating each muscle independently, which led to the conclusion that proprioceptive inputs from sensory receptors in all three synergistic muscles contribute to the perception of dynamic joint position and velocity.
Finally, it was recently demonstrated that there is a very limited range of wrist joint angles at which individual muscle spindle afferents of one muscle are position sensitive (15° on average over the entire 110° of wrist positions in humans), strongly suggesting that position sense relies on population codes (Cordo et al. 2002).
The previous evidence and the present results strongly suggest that position coding is devoted to the whole set of muscles surrounding an articulation, i.e. agonist, antagonist, as well as synergistic. Firstly, we have shown that a home position was not coded by the same muscle spindle static discharge if this position was maintained for a certain time or if it was attained after a movement. Moreover, the static discharge was dependent, firstly, on whether the movement that brought the foot to the home position was lengthening or shortening the parent muscle, and, secondly, on the amount of lengthening or shortening of the movement. The result was that when we took all the synergistic muscles of the anterior part of the leg as a whole, and all those of the posterior part as a whole, they were influenced by previous movement in two opposite ways (see Fig. 2). This is new evidence of muscle spindle hysteresis, which has been extensively studied (see Proske et al. 1993), and is extended here to the case of two-dimensional movements. That ankle extensor and flexor muscles behaved in opposite ways strongly suggests that this nonlinear characteristic of muscle spindle receptors may be masked by the ensemble response and may also be extended to other types of muscle spindle nonlinear characteristics such as adaptation or rate sensitivity (Proske et al. 1993). Whether this masking is also valid in the case of active positioning remains to be investigated.
Secondly, the present results have shown that all muscles crossing an articulation give rise to different average response characteristics depending on their own preferred sensory sector and preferred sensory direction (see Fig. 3; Bergenheim et al. 2000). Similar directional tuning of muscle spindle position response has been recently reported at the level of forearm muscles in humans (Jones et al. 2001).
Finally, a muscle may be pluriarticular, and in order to know which joint a change in position related to the variation in muscle spindle output is referred to, it appears that the CNS must process the ensemble of afferent information related to joint rotation. For example, a contextual decoding of afferent messages arising from extensor digitorum longus muscle seems necessary since receptors in this muscle are excited by ankle extension (see Fig. 3), but their activity is also greatly enhanced by flexion of the toes. It is assumed that messages from EDL associated or not with messages from other ankle muscles will signal an ankle displacement or a toe displacement, respectively.
Validity of the population vector hypothesis in describing the coding of directional information by muscle spindles
The present study has shown that a change in position gave rise to muscle spindle tonic discharges that differed for different spatial orientations of the target. More precisely, the activity of populations of muscle spindle afferents were related to the direction of the change in position in a fashion well described by a sinusoidal directional tuning curve. This property allowed us to apply the population vector model (Georgopoulos et al. 1983) in order to take into account the whole set of muscles surrounding the ankle joint. In this model, each muscle population of afferents makes a vectorial contribution, which is greater for target positions with directions similar to the muscle preferred direction. The vectorial sum of these contributions proved to be a good predictor of the actual change in position direction.
Since we have previously demonstrated that the sum vector was also a good predictor in the case of differently oriented movements (Bergenheim et al. 2000; Roll et al. 2000), it seems that the vector model would be a good means of describing the directional coding of muscle spindle afferents during movements as well as during oriented maintained postures. Notice that such an interpretation of the data supposes the existence of an external coordinate frame. Even if such an endpoint coordinate frame was shown not to be the only one possible for position sense, it appeared to be one of the most interesting on the basis of modeling studies (Scott and Loeb 1994).
It is interesting that the behavior of our populations of muscle spindle afferents parallels that of cortical neurons reported in animal studies. Firstly, motor and parietal cortical neurons present different tonic discharges during postural fixation of the monkey limb in differently oriented positions (Georgopoulos et al. 1983, 1984; Kalaska et al. 1983; Kalaska and Hyde 1985). Secondly, the direction of the sum vector of motor and parietal cortical populations has been shown to also be a good predictor of movement direction (Georgopoulos et al. 1983; Kalaska et al. 1983). Finally, the amplitude of the sum vector is a good predictor of movement velocity both for populations of muscle spindle afferents (Ribot-Ciscar et al. 2002) and for populations of motor cortical neurons (Schwartz 1993). This parallelism between central and peripheral systems is furthermore found at the level of motor units, whose activity is tuned to a cosine function of force direction (Hermann and Flanders 1998).
So, there appears to be a common mechanism of information coding, whether one compares the periphery or high level structures and the motor or the sensory systems. These similarities may be seen as a means to facilitate the dialog between structures, and thus would facilitate the execution as well as the control of postures and movements.
To summarize, muscle spindle position coding relates to afferent information coming from the whole set of muscles crossing a given joint. Indeed, a given spatial position is associated with a particular and stable state of length of each muscle surrounding the joint. This biomechanical landscape in turn generates a proprioceptive landscape that is also stable and where each muscle makes an oriented and weighted contribution to the coding of the actual position.
References
Batschelet E (1981) Circular statistics in biology. Academic Press, London
Bergenheim M, Roll J-P, Ribot-Ciscar E (1999) Microneurography in humans. In: Windhorst U, Johansson H (eds) Modern techniques in neuroscience research. Springer, Berlin Heidelberg New York, pp 801–819
Bergenheim M, Ribot-Ciscar E, Roll JP (2000) Proprioceptive population coding of two-dimensional limb movements in humans. I. Muscle spindle feedback during spatially oriented movements. Exp Brain Res 134:301–310
Botterman BR, Eldred E (1982) Static stretch sensitivity of Ia and II afferents in the cat's gastrocnemius. Pflugers Arch 395:204–211
Capaday C, Cooke JD (1981) The effects of muscle vibration on the attainment of intended final position during voluntary human arm movements. Exp Brain Res 42:228–230
Capaday C, Cooke JD (1983) Vibration-induced changes in movement-related EMG activity in humans. Exp Brain Res 52:139–146
Clark FJ, Burgess RC, Chapin JW, Lipscomb WT (1985) Role of intramuscular receptors in the awareness of limb position. J Neurophysiol 54:1529–1540
Clark FJ, Burgess RC, Chapin JW (1986) Proprioception with the proximal interphalangeal joint of the index finger. Brain 109:1195–1208
Cordo PJ, Gurfinkel VS, Levik Y (2000) Position sense during imperceptibly slow movements. Exp Brain Res 132:1–9
Cordo PJ, Flores-Vieira C, Verschueren SMP, Inglis JT, Gurfinkel V (2002) Position sensitivity of human muscle spindles: single afferent and population representations. J Neurophysiol 87:1186–1195
Gandevia SC, Lesley AH, McCloskey DI, Potter EK (1983) Proprioceptive sensation at the terminal joint of the middle finger. J Physiol 335:507–517
Gandevia SC, McCloskey DI, Burke D (1992) Kinaesthetic signals and muscle contraction. Trends Neurosci 15:62–65
Georgopoulos AP (1990) Neural coding of the direction of reaching and a comparison with saccadic eye movements. Cold Harb Symp Quant Biol 55:849–859
Georgopoulos AP, Caminiti R, Kalaska JF, Massey JT (1983) Spatial coding of movement: a hypothesis concerning the coding of movement direction by motor cortical populations. Exp Brain Res Suppl 7:327–336
Georgopoulos AP, Caminiti R, Kalaska JF (1984) Static spatial effects in motor cortex and Area 5: quantitative relations in a two-dimensional space. Exp Brain Res 54:446–454
Gilhodes JC, Roll JP, Tardy-Gervet MF (1986) Perceptual and motor effects of agonist-antagonist muscle vibration in man. Exp Brain Res 61:395–402
Granit R, Homma S (1959) The discharge to maintained stretch of spindles in slow and fast muscle of rabbit. Acta Physiol Scand 46:165–173
Herrmann U, Flanders M (1998) Directional tuning of single motor units. J Neurosci 18:8402–8416
Horch KW, Clark FJ, Burgess PR (1975) Awareness of knee joint angle under static conditions. J Neurophysiol 38:1436-1447
Hulliger M, Nordh E, Vallbo ÅB (1982) The absence of position response in muscle spindle afferents units from human finger muscles during accurate position holding. J Physiol 322:167–179
Inglis JT, Frank JS (1990) The effect of agonist/antagonist muscle vibration on human position sense. Exp Brain Res 81:573–580
Inglis JT, Frank JS, Inglis B (1991) The effect of muscle vibration on human position sense during movements controlled by lengthening muscle contraction. Exp Brain Res 84:631–634
Jones KE, Wessberg J, Vallbo ÅB (2001) Directional tuning of human forearm muscle afferents during voluntary wrist movements. J Physiol 536:635–647
Kalaska JF, Hyde ML (1985) Area 4 and area 5: differences between the load direction-dependent discharge variability of cells during active postural fixation. Exp Brain Res 59:197–202
Kalaska JF, Caminiti R, Georgopoulos AP (1983) Cortical mechanisms related to the direction of two-dimensional arm movements: relations in parietal area 5 and comparison with motor cortex. Exp Brain Res 51:247–260
Matthews PBC (1982) Where does Sherrington's "muscular sense" originate? Muscles, joints, corollary discharges? Ann Rev Neurosci 5:189–218
McCloskey DI, Gandevia S, Potter EK, Colebatch JG (1983) Muscle sense and effort: motor commands and judgements about muscle contractions. In: Desmedt JE (ed) Motor control mechanisms in health and disease. Raven press, New York, pp 151–167
Proske U, Morgan DL, Gregory JE (1993) Thixotropy in skeletal muscle and in muscle spindles: a review. Prog Neurobiol 41:705–721
Proske U, Wise AK, Gregory JE (2000) The role of muscle receptors in the detection of movements. Prog Neurobiol 60:85–96
Ribot-Ciscar E, Roll JP (1998) Ago-antagonist muscle spindle inputs contribute together to joint movement coding in man. Brain Res 791:167–176
Ribot-Ciscar E, Bergenheim H, Roll JP (2002) The preferred sensory direction of muscle spindle primary endings influences the velocity coding of two-dimensional limb movements in humans. Exp Brain Res 145:429–436
Roll JP, Vedel JP (1982) Kinaesthetic role of muscle afferents in man, studied by tendon vibration and microneurography. Exp Brain Res 47:177–190
Roll JP, Vedel JP, Ribot E (1989) Alteration of proprioceptive messages induced by tendon vibration in man. A microneurographic study. Exp Brain Res 76:213–222
Roll JP, Bergenheim M, Ribot-Ciscar E (2000) Proprioceptive population coding of two-dimensional limb movements in humans. II. Muscle spindle feedback during "drawing-like" movements. Exp Brain Res 134:311–321
Schwartz AB (1993) Motor cortical activity during drawing movements: population representation during sinusoid tracing. J Neurophysiol 70:28–36
Scott SH, Loeb GE (1994) The computation of position sense from spindles in mono- and multiarticular muscles. J Neurosci 14:7529–7540
Taylor JL, McCloskey DI (1990) Ability to detect angular displacements of the fingers made at an imperceptibly slow speed. Brain 113:157–166
Taylor JL, McCloskey DI (1992) Detection of slow movements imposed at the elbow during active flexion in man. J Physiol 457:503–513
Vallbo ÅB (1974) Afferent discharge from human muscle spindles in non-contracting muscles. Steady state impulse frequency as a function of joint angle. Acta Physiol Scand 90:303–318
Vallbo ÅB, Hagbarth KE (1968) Activity from skin mechanoreceptors recorded percutaneously in awake human subjects. Exp Neurol 21:270–289
Vallbo ÅB, Hullinger M, Nordh E (1981) Do spindle afferents monitor joint position in man? A study with active position holding. Brain Res 204:209–213
Verschueren SMP, Cordo PJ, Swinnen SP (1998) Representation of wrist joint kinematics by the ensemble of muscle spindles from synergistic muscles. J Neurophysiol 79:2265–2276
Wise AK, Gregory JE, Proske U (1998) Detection of movements of the human forearm during and after co-contractions of muscles acting at the elbow joint. J Physiol 508:325–330
Acknowledgements
This work was supported by grants from CNRS, INSERM, "Marseille Provence Métropole", the Swedish Council for Work Life Research, and the Swedish Foundation for International Cooperation in Research and Higher Education.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Ribot-Ciscar, E., Bergenheim, M., Albert, F. et al. Proprioceptive population coding of limb position in humans. Exp Brain Res 149, 512–519 (2003). https://doi.org/10.1007/s00221-003-1384-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-003-1384-x