
Abstract
In this paper we devise a first-order-in-time, second-order-in-space, convex splitting scheme for the periodic nonlocal Cahn-Hilliard equation. The unconditional unique solvability, energy stability and \(\ell ^\infty (0, T; \ell ^4)\) stability of the scheme are established. Using the a-priori stabilities, we prove error estimates for our scheme, in both the \(\ell ^\infty (0, T; \ell ^2)\) and \(\ell ^\infty (0, T; \ell ^\infty )\) norms. The proofs of these estimates are notable for the fact that they do not require point-wise boundedness of the numerical solution, nor a global Lipschitz assumption or cut-off for the nonlinear term. The \(\ell ^2\) convergence proof requires no refinement path constraint, while the one involving the \(\ell ^\infty \) norm requires only a mild linear refinement constraint, \(s \le C h\). The key estimates for the error analyses take full advantage of the unconditional \(\ell ^\infty (0, T; \ell ^4)\) stability of the numerical solution and an interpolation estimate of the form \(\left\| \phi \right\| _4 \le C \left\| \phi \right\| _2^\alpha \left\| \nabla _h\phi \right\| _2^{1-\alpha },\alpha = \frac{4-D}{4},D=1,2,3\), which we establish for finite difference functions. We conclude the paper with some numerical tests that confirm our theoretical predictions.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
1.1 The periodic nonlocal Cahn-Hilliard equation
Suppose \(\Omega = (0,L_1)\times (0,L_2) \subset \mathbb {R}^2\). Define \(C^m_\mathrm{per}(\Omega ) = \left\{ f \in C^m\left( \mathbb {R}^2\right) | f \hbox {is } \Omega \hbox {---periodic }\right\} \), where \(m\) is a positive integer. Set \(C^\infty _\mathrm{per}(\Omega ) = \bigcap _{m=1}^\infty C^m_\mathrm{per}(\Omega )\). For any \(1\le q<\infty \), define \(L^q_\mathrm{per}(\Omega ) = \left\{ f \in L_\mathrm{loc}^q\left( \mathbb {R}^2\right) \ | \ f \hbox { is} \Omega \hbox {---periodic}\right\} \). Of course, \(L^q(\Omega )\) and \(L_\mathrm{per}^q(\Omega )\) can be identified in a natural way. Suppose that \(\mathsf {J}:\mathbb {R}^2 \rightarrow \mathbb {R}\) satisfies
- A1.:
-
\(\mathsf {J}= \mathsf {J}_c-\mathsf {J}_e\), where \(\mathsf {J}_c,\, \mathsf {J}_e \in C_\mathrm{per}^\infty \left( \Omega \right) \) are non-negative.
- A2.:
-
\(\mathsf {J}_c\) and \(\mathsf {J}_e\) are even, i.e., \(\mathsf {J}_\alpha (x_1,x_2)\!=\!\mathsf {J}_\alpha (-x_1,-x_2)\), for all \(x_1,x_2\!\in \! \mathbb {R}\), \(\alpha = c\), \(e\).
- A3.:
-
\(\int _\Omega \mathsf {J}(\mathbf{x})\, d\mathbf{x} > 0\).
\(\mathsf {J}\) is called the convolution kernel herein. Given \(\phi \in L_\mathrm{per}^2(\Omega )\), by \(\mathsf {J}*\phi \) we mean the circular, or periodic, convolution defined as
Clearly \(\mathsf {J}*1=\int _\Omega \mathsf {J}(\mathbf{x})\, d\mathbf{x}\) is a positive constant. For any \(\phi \in L_\mathrm{per}^4(\Omega )\), we define
where \(\gamma _c,\, \gamma _e \ge 0\) are constants. Typically, one of \(\gamma _c\) and \(\gamma _e\) are zero. The energy (1.2) is equivalent to
We have the following properties of the energy, which we state without proof:
Lemma 1.1
There exists a non-negative constant \(C\) such that \(E(\phi ) +C \ge 0\) for all \(\phi \in L_\mathrm{per}^4(\Omega )\). More specifically,
If \(\gamma _e = 0\), then \(E(\phi ) \ge 0\) for all \(\phi \in L_\mathrm{per}^4(\Omega )\). Furthermore, the energy (1.2) can be written as the difference of convex functionals, i.e, \(E = E_c-E_e\), where
The decomposition above is not unique; for instance, one could argue that a more natural convex splitting of the energy is given by
But (1.6)–(1.7) has some advantages over this last decomposition. Specifically, (1.6)–(1.7) will allow us to separate the nonlocal and nonlinear terms, treating the nonlinearity implicitly and the nonlocal term explicitly, without sacrificing numerical stability. The chemical potential \(w\) relative to the energy (1.3) is defined as
The conserved gradient dynamics,
yields what we will refer to as the nonlocal Cahn-Hilliard (nCH) equation. Formally, periodic solutions of (1.9) dissipate \(E\) at the rate \(d_t E(\phi ) = -\left\| \nabla w \right\| _{L^2}^2\). The nCH equation (1.9) can be rewritten as
where
We refer to \(a(\phi )\) as the diffusive mobility, or just the diffusivity. To make (1.9) positive diffusive (and non-degenerate) we require [9]
in which case \(a(\phi ) >0\). We will assume that (1.12) holds in the sequel. We will not explicitly consider the non-conserved dynamics case herein,
though many of the ideas we present will be applicable for this model as well.
1.2 A semi-discrete convex-splitting scheme
Our principal goal in this paper is to describe a first-order accurate (in time) convex splitting scheme that is unconditionally solvable, unconditionally energy stable, and convergent. To motivate the fully discrete scheme that will follow later, we here present semi-discrete version and briefly describe its properties.
A first-order (in time) convex splitting scheme for the nCH Eq. (1.9) can be constructed as follows: given \(\phi ^k\in C^\infty _\mathrm{per}(\Omega )\), find \(\phi ^{k+1},\, w^{k+1}\in C^\infty _\mathrm{per}(\Omega )\) such that
where \(s>0\) is the time step size. Notice that this scheme respects the convex splitting of the energy \(E\) given in (1.6) and (1.7). The contribution to the chemical potential corresponding to the convex energy, \(E_c\), is treated implicitly, the part corresponding to the concave part, \(E_e\), is treated explicitly. Eyre [19] is often credited with proposing the convex splitting methodology for the Cahn-Hilliard and Allen-Cahn equations. The idea is, however, quite general and can be applied to any gradient flow of an energy that splits into convex and concave parts. See for example [37–40]. The method can even be extended to second-order accuracy in time [5, 28, 34].
We have the following a priori energy law for the solutions of the first-order scheme (1.14)–(1.15), which is stated without proof. The proof for the fully discrete version appears later in Section 3.2, and the details are similar.
Theorem 1.2
Suppose the energy \(E(\phi )\) is as defined in Eq. (1.2). For any \(s>0\), the convex splitting scheme (1.14)–(1.15) has a unique solution \(\phi ^{k+1},\, w^{k+1}\in C^\infty _\mathrm{per}(\Omega )\). Moreover, for any \(k\ge 1,\left( \phi ^{k+1}-\phi ^k,1\right) = 0\) and
where
The remainder term, \(R\left( \phi ^k,\phi ^{k+1}\right) \), is non-negative, which implies that the energy is non-increasing for any \(s\), i.e., \(E\left( \phi ^{k+1}\right) \le E\left( \phi ^k\right) \), and we say that the scheme is unconditionally energy stable.
In the sequel, we will propose fully discrete versions of this scheme and provide the corresponding analysis.
1.3 Related models and existing numerical results
Equation (1.9) is in the more general family of models:
The corresponding energy for this equation is
With the appropriate choices of mobility \(M\), free energy density \(f\), and interaction kernel \(\mathsf {J}\), Eq. (1.18) resembles the dynamical density functional theory (DDFT) equations. See, e.g., [3, 4, 15, 18, 29, 30, 36]. There are also biological applications for equations of this form [13, 41]. We point out that integro-partial differential equations (IPDE) like Eq. (1.18) also appear in [21, 22, 26, 27, 31, 32] for applications in phase separation and image processing, to name a few. There are a number of analysis results concerning IPDEs like (1.18). Specifically, see [6, 8–10, 20, 22–24, 26] and references therein.
The energy (1.19) can be related to the more familiar (local) Ginzburg-Landau energy
relative to which the classical Cahn-Hilliard equation [11, 12] is the conserved gradient flow:
To see the relationship between the local and nonlocal energies, one approximates the gradient energy density \(\frac{1}{4}\int _\Omega \mathsf {J}(\mathbf{x}-\mathbf{y})\left( \phi (\mathbf{x})-\phi (\mathbf{y})\right) ^2d\mathbf{y}\) using a Taylor expansion [3, 10, 18, 41]. Specifically, assuming \((\phi (\mathbf{x})-\phi (\mathbf{y}))\approx (\mathbf{x}-\mathbf{y})\cdot \nabla \phi (\mathbf{x})\), we find
where \(\epsilon ^2 = \frac{1}{2}\int _\Omega \mathsf {J}(\mathbf{x})|\mathbf{x}|^2 \, d\mathbf{x}\) is the second moment of \(\mathsf {J}\), which is clearly non-negative if \(\mathsf {J}_e \equiv 0\). Periodic solutions of the Cahn-Hilliard equation dissipate the Ginzburg-Landau energy (1.20) at the rate \(d_t E_{CH}(\phi ) = -\left\| \nabla \left( \delta _\phi E_{CH}\right) \right\| _{L^2}^2\), in analogy with the non-local case. The phase field crystal (PFC) equation [16, 17, 39] can be related to DDFT model in a similar manner. In essence, for the PFC equation, given that the kernel \(\mathsf {J}\) in the DDFT model has the appropriate structure, the following fourth order expansion will be a good approximation of the gradient energy [16]:
In this case it is usual that \(\mathsf {J}_c\) and \(\mathsf {J}_e\) are both non-trivial, i.e., \(\mathsf {J}_c,\, \mathsf {J}_e\not \equiv 0\).
There are a few works dedicated to numerical simulation of, or numerical methods for, equations like (1.9) and (1.13). Anitescu et al. [2] considered an implicit-explicit time stepping framework for a nonlocal system modeling turbulence, where, as here, the nonlocal term is treated explicitly. The work in [14, 42] address the finite element approximation (in space) of nonlocal peridynamic equations with various boundary conditions. In [7], a finite difference method for Eq. (1.13) with non-periodic boundary conditions is applied and analyzed. The work in [26] uses a spectral-Galerkin method to solve a nonlocal Allen-Cahn type problem, like Eq. (1.13), but with a stochastic noise term and equation modeling heat flow. For other papers focused on approximating solutions to equations like (1.9), see [1, 21, 27, 33].
Our method, which is based on the convex splitting introduced earlier, is the first that we know of that is shown to be unconditionally energy stable, unconditionally uniquely solvable, and convergent for the nCH Eq. (1.9). We use a finite difference method to discretize space, but a galerkin spatial discretization is also possible. We are also able, based on the structure of our implicit-explicit method—specifically, since we are able to separate the nonlinear and nonlocal terms of the scheme—to implement a very efficient nonlinear multigrid solver, though the full details of the performance and implementation will appear only in a later work. The present work focuses on the 2D case but is scalable to 3D easily. Using the a-priori stabilities that we are able to obtain, we prove the convergence for our scheme, in both \(\ell ^2\) and \(\ell ^\infty \) spatial norms. The proofs of our estimates are notable for the fact that they do not require point-wise boundedness of the numerical solution, nor a global Lipschitz assumption or cut-off for the nonlinear term. The \(\ell ^2\) convergence proof requires no refinement path constraint, while the one involving the \(\ell ^\infty \) norm requires only a mild linear refinement constraint, \(s \le C h\).
The key estimates for the error analyses, which are summarized in Sect. 2, take full advantage of the unconditional \(\ell ^\infty (0, T; \ell ^4)\) stability of the numerical solution and an interpolation estimate of the form \(\left\| \phi \right\| _4 \le C \left\| \phi \right\| _2^\alpha \left\| \nabla _h\phi \right\| _2^{1-\alpha },\alpha = \frac{4-D}{4},D=1,2,3\), which we establish for finite difference functions in an appendix. In Sect. 3 we define the fully discrete scheme and give some of its basic properties, including energy stability and solvability. In Sect. 4 we give the details of the convergence analyses, and in Sect. 5 we provide the results of some numerical tests that confirmed some of the theoretical predictions. We relegate many of the technical details that would slow the reading of the paper to three appendices.
2 The discrete periodic convolution and useful inequalities
Here we define a discrete periodic convolution operator on a 2D periodic grid. We need two spaces: \({\mathcal C}_{m\times n}\) is the space of cell-centered grid (or lattice) functions, and \(\mathcal V_{m\times n}\) is the space of vertex-centered grid functions. The precise definitions can be found in App. 6. The spaces and the following have straightforward extensions to three dimensions. Suppose \(\phi \in \mathcal C_{m\times n}\) is periodic and \(f \in \mathcal V_{m\times n}\) is periodic. Then the discrete convolution operator \(\left[ f \star \phi \right] : {\mathcal V}_{m \times n} \times {\mathcal C}_{m\times n} \rightarrow {\mathcal C}_{m\times n}\) is defined component-wise as
Note very carefully that the order is important in the definition of the discrete convolution \(\left[ \, \cdot \, \star \, \cdot \, \right] \). The next result follows from the definition of the discrete convolution and simple estimates. The proof is omitted.
Lemma 2.1
If \(\phi , \psi \in \mathcal {C}_{m \times n}\) are periodic and \(f \in \mathcal {V}_{m \times n}\) is periodic and even, i.e., \(f_{i+\frac{1}{2},j+\frac{1}{2}} = f_{-i+\frac{1}{2},-j+\frac{1}{2}}\), for all \(i,j\in \mathbb {Z}\), then
If, in addition, \(f\) is non-negative then
The detailed proofs of the next two results are presented in the appendix. The following lemma is the key to the \(\ell _2\) convergence analysis.
Lemma 2.2
Suppose \(\phi ,\, \psi \in \mathcal {C}_{m\times n}\) are periodic with equal means, i.e., \(\left( \phi -\psi \Vert \mathbf{1} \right) =0\). Suppose that \(\phi \) and \(\psi \) are in the classes of grid functions satisfying
where \(C_{0}\) is an \(h\)-independent positive constant. Then, there exists a positive constant \(C_1\), which depends on \(C_0\) but is independent of \(h\), such that
Lemma 2.3
Suppose \(\phi , \psi \in \mathcal {C}_{m \times n}\) are periodic. Assume that \(\mathsf {f} \in C_\mathrm{per}^\infty (\Omega )\) is even and define its grid restriction via \(f_{i+\frac{1}{2},j+\frac{1}{2}} := \mathsf {f}\left( p_{i+\frac{1}{2}},p_{j+\frac{1}{2}}\right) \), so that \(f\in \mathcal {V}_{m\times n}\). Then for any \(\alpha > 0\), we have
where \(C_2\) is a positive constant that depends on \(\mathsf {f}\) but is independent of \(h\).
3 A convex splitting scheme and its properties
3.1 Discrete energy and a fully discrete convex splitting scheme
We begin by defining a fully discrete energy that is consistent with the energy (1.2) in continuous space. In particular, the discrete energy \(F:{\mathcal C}_{m \times n}\rightarrow \mathbb {R}\) is given by
where \(J := J_c-J_e\), and \(J_\alpha \in \mathcal {V}_{m \times n}\), \(\alpha = c,e\), are defined via the vertex-centered grid restrictions \(\left( J_\alpha \right) _{i+\frac{1}{2},j+\frac{1}{2}} := \mathsf {J}_\alpha (p_{i+\frac{1}{2}},p_{j+\frac{1}{2}})\).
Lemma 3.1
Suppose that \(\phi \in \mathcal {C}_{m \times n}\) is periodic and define
Then \(F_c\) and \(F_e\) are convex, and the gradients of the respective energies are
Hence \(F\), as defined in (3.1), admits the convex splitting \(F = F_c-F_e\).
Proof
\(F_c\) is clearly convex. To see that \(F_e\) is convex, make use of the estimate (2.3) and observe that \(\left. \frac{d^2}{ds^2} F_e(\phi +s\psi )\right| _{s=0} \ge 0\), for any periodic \(\psi \in \mathcal {C}_{m\times n}\). We suppress the details for brevity. \(\square \)
We now describe the fully discrete schemes in detail. Define the cell-centered chemical potential \(w\in {\mathcal C}_{m \times n}\) to be
The scheme for conserved dynamics can be formulated as: given \(\phi ^k\in {\mathcal C}_{m \times n}\) periodic, find \(\phi ^{k+1},\, w^{k+1} \in {\mathcal C}_{m \times n}\) periodic so that
where \(\Delta _h\) is the standard five-point discrete laplacian operator.
3.2 Unconditional solvability and energy stability
Now we show that the convex splitting framework automatically confers unconditional solvability and stability properties to our scheme (3.6). The solvability follows immediately from the fact that \(F_c\) is convex. The details for the proof were established in [39]—see also [38, 40]—and we therefore omit them for brevity.
Theorem 3.2
The scheme (3.6) is discretely mass conservative, i.e., \(\left( \phi ^{k+1}-\phi ^k \Vert \mathbf{1} \right) =0\), for all \(k\ge 0\), and uniquely solvable for any time step size \(s>0\).
Lemma 3.3
Suppose that \(\phi \in {\mathcal C}_{m\times n}\) is periodic and the discrete energy \(F\) is as defined as Eq. (3.1). There exists a non-negative constant \(C\) such that \(F(\phi ) +C \ge 0\). More specifically,
Proof
Using the estimate (2.3),
Consider the polynomials
Observe that
and, using (3.9),
Utilizing the polynomial inequalities
the estimates follow. \(\square \)
The following is a discrete version of Theorem 1.2.
Theorem 3.4
Suppose the energy \(F(\phi )\) is as defined in Eq. (3.1), assume \(\phi ^{k+1},\, \phi ^k\in {\mathcal C}_{m \times n}\) are periodic and they are solutions to the scheme (3.6). Then for any \(s>0\)
with the remainder term, \(R_h\), given by
Most importantly, \(R_h\left( \phi ^k,\phi ^{k+1}\right) \) is non-negative, which implies that the energy is non-increasing for any \(s\), i.e., \(F\left( \phi ^{k+1}\right) \le F\left( \phi ^k\right) \).
Proof
To obtain (3.14), we note the following identities. First, for the quartic terms,
Likewise
and
Making use of (2.2), we find
Now, testing Eq. (3.6) with \(w^{k+1}\), we obtain
where
Using identities (3.16)–(3.19) in the last equation, we get
Next, we show that \(R_h\left( \phi ^k,\phi ^{k+1}\right) \ge 0\). Clearly
where we have used estimate (2.3) twice in the last step. The result is proved. \(\square \)
Remark 3.5
If we are not interested in the specific form of \(R_h\), only that \(R_h\ge 0\), then the previous result, the unconditional energy stability, follows immediately from the fact that we use a convex splitting scheme, appealing to [39, Thms. 3.5 and 3.6].
Putting Lemma 3.3 and Theorem 3.4 together, we immediately get the following.
Corollary 3.6
Suppose that \(\left\{ \phi ^k,w^k\right\} _{k=1}^l\in \left[ {\mathcal C}_{m \times n}\right] ^2\) are a sequence of periodic solution pairs of the scheme (3.6) with the starting values \(\phi ^0\). Then, for any \(1 \le k \le l\),
Theorem 3.7
Suppose \(\Phi \in C_\mathrm{per}^\infty (\Omega )\) and set \(\phi ^0_{i,j} := \Phi (p_i,p_j)\). Suppose that \(\left\{ \phi ^k,w^k\right\} _{k=1}^l\in \left[ {\mathcal C}_{m \times n}\right] ^2\) are a sequence of periodic solution pairs of the scheme (3.6) with the starting values \(\phi ^0\). There exist constants \(C_3,\, C_4,\, C_5 >0\), which are independent of \(h\) and \(s\), such that
and
Proof
Since the discrete energy \(F\) is consistent with the continuous energy \(E\),
where \(C>0\) is independent of \(h\). Invoking Cor. 3.6 and using a second consistency argument on the discrete convolution \(\left[ J_e \star \mathbf{1} \right] \), for all \(1\le k\le l\), we have
The right-hand-side is clearly independent of \(h\) and \(s\), and (3.26) follows. Estimate (3.27) is similar. Finally estimate (3.28) follows by summing (3.14) and proceeding as above. \(\square \)
4 \(\ell ^\infty \left( \ell ^2\right) \) and \(\ell ^{\infty }\left( \ell ^\infty \right) \) norm error estimates
We conclude this section with two local-in-time error estimates for our convex splitting scheme (3.6) in two dimensions. The extension of the proofs to three dimensions is omitted for the sake of brevity, but see Remark 7.5 for some of the details. First, we establish an error estimate in the \(\ell ^\infty (0,T; \ell ^2)\) norm that has no restriction on the refinement path. Then we prove an estimate in the \(\ell ^\infty (0,T; \ell ^\infty )\) norm under the mild linear refinement path constraint \(s \le C h\).
The existence and uniqueness of a smooth, periodic solution to the IPDE (1.9) with smooth periodic initial data may be established using techniques developed by Bates and Han in [8, 9]. In the following pages we denote this IPDE solution by \(\Phi \). Motivated by the results of Bates and Han, and based on the assumptions in the introduction, it will be reasonable to assume that
for any \(T >0\), and therefore also, using a consistency argument, that
after setting \(\Phi ^k_{i,j} := \Phi (p_i,p_j,t_k)\), where \(C\) is independent of \(h\) and \(s\) and \(t_k=k \cdot s\). The IPDE solution \(\Phi \) is also mass conservative, meaning that, for all \(0\le t\le T,\int _\Omega \left( \Phi (\mathbf{x},0) - \Phi (\mathbf{x},t)\right) d\mathbf{x}= 0\). For our numerical scheme, on choosing \(\phi _{i,j}^0 := \Phi _{i,j}^0\), we note that \(\left( \phi ^k-\Phi ^0 \Vert \mathbf{1} \right) = 0\), for all \(k\ge 0\). But, unfortunately, \(\left( \phi ^k-\Phi ^k \Vert \mathbf{1} \right) \ne 0\) in general. On the other hand, by consistency,
for some \(C>0\) that is independent of \(k\) and \(h\), for all \(1\le k \le l\). We set \(\tilde{\Phi }^k := \Phi ^k+\beta ^k\) and observe \(\big ({\phi ^k-\Phi ^k}\big \Vert {\mathbf{1}}\big ) = 0\) and also
Finally, the assumptions on the continuous kernel \(\mathsf {J}\), specifically (1.12), and the consistency of the discrete convolution will further imply
for some \(\alpha _0\) that is independent of \(h\), provided \(h\) is sufficiently small.
Theorem 4.1
Given smooth, periodic initial data \(\Phi (x_1,x_2,t=0)\), suppose the unique, smooth, periodic solution for the IPDE (1.9) is given by \(\Phi (x,y,t)\) on \(\Omega \) for \(0<t\le T\), for some \(T< \infty \). Define \(\Phi _{i,j}^k\) as above and set \(e_{i,j}^k := \Phi _{i,j}^k-\phi _{i,j}^k\), where \(\phi ^k_{i,j}\in {\mathcal C}_{m \times n}\) is \(k^\mathrm{th}\) periodic solution of (3.6) with \(\phi ^0_{i,j} := \Phi ^0_{i,j}\). Then, provided \(s\) and \(h\) are sufficiently small, for all positive integers \(l\), such that \(l\, s \le T\), we have
where \(C>0\) is independent of \(h\) and \(s\).
Proof
By consistency, the IPDE solution \(\Phi \) solves the discrete equation
where the local truncation error \(\tau ^{k+1}\) satisfies
for all \(i\), \(j\), and \(k\) for some \(C_6\ge 0\) that depends only on \(T\), \(L_1\) and \(L_2\). Subtracting (3.6) from (4.7) yields
Multiplying by \(2h^2e^{k+1}\), summing over \(i\) and \(j\), and applying Green’s second identity (6.3) we have
To estimate the nonlinear term we need to work with \(\tilde{\Phi }^k:= \Phi ^k +\beta ^k\) rather than \(\Phi ^k\), because we require \(\big ({\phi ^k-\tilde{\Phi }^k}\big \Vert {\mathbf{1}}\big ) = 0\) to use Lemma 2.2. The switch gives another consistency error, \(\tilde{\tau }^k\), of the same order as \(\tau ^k\):
We now make a key estimate. Set \(\tilde{e}^k:=\tilde{\Phi }^k-\phi ^k\), and observe that \(\left( \tilde{e}^k \Vert \mathbf{1} \right) = 0\), \(1\le k\le l\). Applying Lemma 2.2 we obtain
where we have taken \(\alpha = \alpha _0\) and \(\alpha _0\) is from (4.5). Note that \(C_1\) is independent of both \(s\) and \(h\). Using summation-by-parts, we get
Using summation-by-parts, the Cauchy-Schwartz inequality, and Cauchy’s inequality, we have
By Lemma 2.3,
for any \(\alpha >0\). Cauchy’s inequality shows that
for some \(C_7 >0\). Combining the above results, we have
Therefore,
Summing on \(k\), from \(k=0\) to \(k = l-1\), and using \(e^{0}\equiv 0\), we have
where we have used \(\left[ J_c \star \mathbf{1} \right] -\left[ J_e \star \mathbf{1} \right] + \gamma _c - \gamma _e = \alpha _0\) as in (4.5). Assuming that \(h\) is small enough so that the inequality in (4.5) holds and taking \(\alpha = \frac{\alpha _0}{2}\), we obtain
As a direct consequence, the following inequality holds:
with \(C_8 := 1 + \frac{C_1}{\alpha _0^3}\) and \(C_9 := C_7+\frac{C}{\alpha _0^3}\). Simplifying,
Assuming \( s < \frac{1}{C_8}\) and \(l\, s \le T\), we arrive at
An application of the discrete Gronwall inequality yields the desired result, and the proof is complete. \(\square \)
Using a higher order consistency analysis via a perturbation argument, we can use the last theorem to show an optimal order convergence of the method in the \(\ell ^\infty (0,T;\ell ^\infty )\) norm.
Theorem 4.2
Under the assumptions of Theorem 4.1 and enforcing the linear refinement path constraint \(s \le C h\), with \(C\) any fixed constant, we also have optimal order convergence of the numerical solution of the scheme (3.6) in the \(\ell ^\infty \) norm. Namely, if \(s\) and \(h\) are sufficiently small, for all positive integers \(l\), such that \(l\, s \le T\), we have
where \(C>0\) is independent of \(h\) and \(s\).
Proof
The local truncation error in (4.7) will not be enough to recover a full \(O (s + h^2)\) error estimate in the norm \(\left\| \, \cdot \, \right\| _\infty \). To remedy this, we need to construct supplementary fields, \(\Phi ^1_h,\Phi ^1_s\), and \(\hat{\Phi }\), satisfying
so that a higher \(O (s^2 + h^4)\) consistency is satisfied with the given numerical scheme (3.6). The constructed fields \(\Phi ^1_h,\Phi ^1_s\), which will be found using a perturbation expansion, will depend solely on the exact solution \(\Phi \).
The following truncation error analysis for the spatial discretization can be obtained by using a straightforward Taylor expansion for the exact solution:
Here the spatially discrete function \({{\varvec{g}}}^{(0)}\) is smooth enough in the sense that its discrete derivatives are bounded. Also note that there is no \(O(h^3)\) truncation error term, due to the fact that the centered difference used in the spatial discretization gives local truncation errors with only even order terms, \(O(h^2),O(h^4)\), et cetera.
The spatial correction function \(\Phi ^1_h\) is given by solving the following equation:
Existence of a solution of the above linear system of ODEs is a standard exercise. Note that the solution depends only on the exact solution, \(\Phi \). In addition, the divided differences of \(\Phi ^1_h\) of various orders are bounded.
Now, we define
A combination of (4.26) and (4.27) leads to the fourth order local truncation error for \(\Phi ^*_h\):
for which the following estimate was used:
We remark that the above derivation is valid since all \(O(h^2)\) terms cancel in the expansion.
Regarding the temporal correction term, we observe that the application of the convex splitting scheme (3.6) for the profile \(\Phi ^*_h\) gives
In turn, the first order temporal correction function \(\Phi ^1_s\) is given by the solution of the following linear ordinary differential equations
Again, the solution of (4.32), which exists and is unique, depends solely on the profile \(\Phi ^*_h\) and is smooth enough in the sense that its divided differences of various orders are bounded. Similar to (4.31), an application of the convex splitting scheme to \(\Phi ^1_s\) reads
Therefore, a combination of (4.31) and (4.33) shows that
in which the construction (4.25) for the approximate solution \(\hat{\Phi }\) is recalled and we have used the following estimate
As stated earlier, the purpose of the higher order expansion (4.25) is to obtain an \(L^{\infty }\) estimate of the error function via its \(L^2\) norm in higher order accuracy by utilizing an inverse inequality in spatial discretization, which will be shown below. A detailed analysis shows that
since \(\left\| \Phi ^1_h \right\| _\infty , \left\| \Phi ^1_s \right\| _\infty \le C\). Subsequently, the following error function is considered:
In other words, instead of a direct comparison between the numerical solution \(\phi \) and the exact solution \(\Phi \), we estimate the error between the numerical solution and the constructed solution to obtain a higher order convergence in \(\left\| \, \cdot \, \right\| _2\) norm. Subtracting (3.6) from (4.35) yields
By repeating the same technique in the proof of Theorem 4.1, we arrive at the following error estimate in the \(\ell ^\infty (0,T; \ell ^2)\) norm:
Therefore, by the inverse inequality (6.2), we get
since \(s \le C h\). The triangle inequality now yields
with an application of triangle inequality. The result is proven. \(\square \)
5 Numerical tests
In this section we discuss the results of two numerical experiments verifying the theoretical convergence and stability of the scheme. Numerical solutions of the scheme were calculated using a nonlinear multigrid solver, similar to the solvers described in [28, 40]. The details and performance of the solver will be given in a later paper. The first experiment verifies the convergence rate in the \(\ell ^\infty (0,T;\ell ^2)\) norm. We use smooth, periodic initial data \(\phi (x_1,x_2,0) = 0.5\sin (2\pi x_1)\sin (2 \pi x_2)\) on a square domain \(\Omega = (-0.5,0.5)^2\). The convolution kernel is constructed via
The composite kernel \(\mathsf {J}=\mathsf {J}_c-\mathsf {J}_e\) is very small in magnitude near the boundary of \(\Omega \), and we extend it periodically outside of \(\Omega \). Technically, \(\mathsf {J}\notin C_\mathrm{per}^\infty \), but this does not affect the convergence, as expected. The other parameters are \(\gamma _c =0\) and \(\gamma _e = 1\). The time step size is precisely \(s = h^2\), with the spatial step sizes as indicated in Table 1. The final time for the tests is taken as \(T=40\left( \frac{1}{128}\right) ^2 = 2.44140625\times 10^{-3}\).
As we utilize a quadratic refinement path, \(s = h^2\), the global error is expected to be \(O(h^2)\) in the \(\ell ^\infty (0,T;\ell ^2)\) norm. We do not have the exact solution—these are not easily obtained for non-trivial convolution kernels—against which to compare our computed solutions in the present case. To overcome this, in our error calculations we are using the difference between results on successive coarse and fine grids as a measure of the error. The difference function, \(e_{A}\), is evaluated at time \(t = T\) using the method described in [28, 40]. The result is given in Table 1. The global second-order accuracy of the method is confirmed when a quadratic refinement path is used.
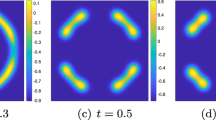
The second experiment is the simulation of spinodal decomposition. The initial data are random, specifically, \(\phi (x_1,x_2,0) = r(x_1,x_2)\), where \(r\) is a uniformly distributed random variable in the interval \([-0.05,0.05]\). The convolution kernel \(\mathsf {J}\) is the same as in (5.1). We take \(\gamma _c = 0\), \(\gamma _e=1\) and \(\Omega = (-5,5)^2\). The parameters of the numerical simulation are \(h = 10/256\) and \(s = 1.0\times 10^{-4}\). The final time for the simulation is \(T=2\). Figure 1 shows snapshots of the evolution of \(\phi \) up to time \(T=2\), and Fig. 2 shows the corresponding numerical energy for the simulation. The energy is observed to decay as time increases, as predicted by the theory.

Spinodal decomposition of with random initial data using the nonlocal model. The plots above show filled contour plots of the computed solution \(\phi \) at the indicated times

Remark 5.1
To keep the current exposition brief, we have severely limited the number of computational examples in this paper. But, note that the assumptions on the convolution kernel, (A1)–(A3), are rather general, and our methods apply to a wide a variety of physically relevant kernels. Many more computational examples, including anisotropic, multi-well, and unsigned kernels, can be found in our recent paper [25].
References
Abukhdeir, N., Vlachos, D., Katsoulakis, M., Plexousakis, M.: Long-time integration methods for mesoscopic models of pattern-forming systems. J. Comp. Phys. 230, 5704–5715 (2011)
Anitescu, M., Pahlevani, F., Layton, W.J.: Implicit for local effects and explicit for nonlocal effects is unconditionally stable. Electron. Trans. Numer. Anal. 18, 174–187 (2004)
Archer, A., Evans, R.: Dynamical density functional theory and its application to spinodal decomposition. J. Chem. Phys. 121, 4246–4254 (2004)
Archer, A., Rauscher, M.: Dynamical density functional theory for interacting brownian particles: Stochastic or deterministic? J. Phys. A: Math. Gen. 37, 9325 (2004)
Baskaran, A., Hu, Z., Lowengrub, J.S., Wang, C., Wise, S.M., Zhou, P.: Stable and efficient finite-difference nonlinear-multigrid schemes for the modified phase field crystal equation. J. Comput. Phys. 250, 270–292 (2013)
Bates, P.: On some nonlocal evolution equations arising in materials science. In: Brunner, H., Zhao, X.-Q., Zou, X. (eds.) Nonlinear Dynamics and Evolution Equations, vol 48 of Fields Institute Communications, pp. 13–52. American Mathematical Society, Providence (2006)
Bates, P., Brown, S., Han, J.: Numerical analysis for a nonlocal Allen-Cahn equation. Int. J. Numer. Anal. Model. 6, 33–49 (2009)
Bates, P., Han, J.: The dirichlet boundary problem for a nonlocal Cahn-Hilliard equation. J. Math. Anal. Appl. 311, 289 (2005)
Bates, P., Han, J.: The neumann boundary problem for a nonlocal Cahn-Hilliard equation. J. Diff. Eq. 212, 235 (2005)
Bates, P., Han, J., Zhao, G.: On a nonlocal phase-field system. Nonlinear Anal.: Theory Methods Appl. 64, 2251–2278 (2006)
Cahn, J.: On spinodal decomposition. Acta Metallurgica 9, 795–801 (1961)
Cahn, J., Hilliard, J.: Free energy of a nonuniform system. I. Interfacial free energy. J. Chem. Phys. 28, 258 (1958)
Chauviere, A., Hatzikirou, H., Kevrekidis, I.G., Lowengrub, J.S., Cristini, V.: Dynamic density functional theory of solid tumor growth: preliminary models. AIP Adv. 2, 011210 (2012)
Du, Q., Gunzburger, M., LeHoucq, R., Zhou, K.: Analysis and approximation of nonlocal diffusion problems with volume constraints. SIAM Rev. 54, 667–696 (2012)
Dzubiella, J., Likos, C.: Mean-field dynamical density functional theory. J. Phys.: Condens. Matter 15, L147–L154 (2003)
Elder, K., Katakowski, M., Haataja, M., Grant, M.: Modeling elasticity in crystal growth. Phys. Rev. Lett. 88, 245701 (2002)
Emmerich, H., Löwen, H., Wittkowski, R., Gruhn, T., Tóth, G.I., Tegze, G., Gránásy, L.: Phase-field-crystal models for condensed matter dynamics on atomic length and diffusive time scales: an overview. Adv. Phys. 61, 665–743 (2012)
Evans, R.: The nature of the liquid-vapour interface and other topics in the statistical mechanics of non-uniform, classical fluids. Adv. Phys. 28, 143 (1979)
Eyre, D.: Unconditionally gradient stable time marching the Cahn-Hilliard equation. In: Bullard, J.W., Kalia, R., Stoneham, M., Chen, L.Q. (eds.) Computational and Mathematical Models of Microstructural Evolution. vol 53, pp. 1686–1712. Materials Research Society, Warrendale (1998)
Fife, P.C.: Some nonclassical trends in parabolic and parabolic-like evolutions. In: Kirkilionis, M., Kromker, S., Rannacher, R., Tomi F., (eds.) Trends in Nonlinear Analysis, chapter 3, pp. 153–191. Springer (2003)
Gajewski, H., Gärtner, K.: On a nonlocal model of image segmentation. Z. Angew. Math. Phys. 56, 572–591 (2005)
Gajewski, H., Zacharias, K.: On a nonlocal phase separation model. J. Math. Anal. Appl. 286, 11–31 (2003)
Giacomin, G., Lebowitz, J.: Phase segregation dynamics in particle systems with long range interactions. i. Macroscopic limits. J. Stat. Phys. 87, 37–61 (1997)
Giacomin, G., Lebowitz, J.: Dynamical aspects of the Cahn-Hilliard equation. SIAM J. Appl. Math. 58, 1707–1729 (1998)
Guan, Z., Lowengrub, J.S., Wang, C., Wise, S.M.: Second-order convex splitting schemes for nonlocal Cahn-Hilliard and Allen-Cahn equations. J. Comput. Phys. (in review) (2013)
Hartley, T., Wanner, T.: A semi-implicit spectral method for stochastic nonlocal phase-field models. Discrete and Cont. Dyn. Sys. 25, 399–429 (2009)
Hornthrop, D., Katsoulakis, M., Vlachos, D.: Spectral methods for mesoscopic models of pattern formation. J. Comp. Phys. 173, 364–390 (2001)
Hu, Z., Wise, S.M., Wang, C., Lowengrub, J.S.: Stable and efficient finite-difference nonlinear-multigrid schemes for the phase field crystal equation. J. Comput. Phys. 228, 5323–5339 (2009)
Likos, C., Mladek, B.M., Gottwald, D., Kahl, G.: Why do ultrasoft repulsive particles cluster and crystallize? Analytical results from density-functional theory. J. Chem. Phys. 126, 224502 (2007)
Marconi, U., Tarazona, P.: Dynamic density functional theory of fluids. J. Chem. Phys. 110, 8032 (1999)
De Masi, A., Orlandi, E., Presutti, E., Triolo, L.: Glauber evolution with kac potentials 1: mesoscopic and macroscopic limits, interface dynamics. Nonlinearity 7, 633 (1994)
De Masi, A., Orlandi, E., Presutti, E., Triolo, L.: Uniqueness and global stability of the instanton in nonlocal evolution equations. Rend. Mat. 14, 693–723 (1994)
Sachs, E.W., Strauss, A.K.: Efficient solution of a partial integro-differential equation in finance. Appl. Numer. Math. 58, 1687–1703 (2008)
Shen, J., Wang, C., Wang, X., Wise, S.M.: Second-order convex splitting schemes for gradient flows with ehrlich -schwoebel type energy: Application to thin film epitaxy. SIAM J. Numer. Anal. 50, 105–125 (2012)
Temam, R.: Navier-Stokes Equations: Theory and Numerical Analysis. American Mathematical Society, Providence, RI, USA (2000)
van Teeffelen, S., Likos, C., Löwen, H.: Colloidal crystal growth at externally imposed nucleation clusters. Phys. Rev. Lett 100, 108302 (2008)
Wang, C., Wang, X., Wise, S.M.: Unconditionally stable schemes for equations of thin film epitaxy. Discrete Cont. Dyn. Sys. Ser. A 28, 405–423 (2010)
Wang, C., Wise, S.M.: An energy stable and convergent finite-difference scheme for the modified phase field crystal equation. SIAM J. Numer. Anal. 49, 945 (2011)
Wang, C., Wise, S.M., Lowengrub, J.S.: An energy-stable and convergent finite-difference scheme for the phase field crystal equation. SIAM J. Numer. Anal. 47, 2269–2288 (2009)
Wise, S.M.: Unconditionally stable finite difference, nonlinear multigrid simulation of the Cahn-Hilliard-Hele-Shaw system of equations. J. Sci. Comput. 44, 38–68 (2010)
Wise, S.M., Lowengrub, J.S., Frieboes, H.B., Cristini, V.: Three-dimensional multispecies nonlinear tumor growth I: Model and numerical method. J. Theor. Biol. 253, 524–543 (2008)
Zhou, K., Du, Q.: Mathematical and numerical analysis of linear peridynamic models with nonlocal boundary conditions. SIAM J. Numer. Anal. 48, 1759–1780 (2010)
Acknowledgments
CW and SMW acknowledge the generous support of the National Science Foundation through their respective grants DMS-1115420 and DMS 1115390. CW also acknowledges support from the National Natural Science Foundation of China through grant NSFC-11271281.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A: Finite difference discretization of space
Our primary goal in this appendix is to define some finite-difference operators and provide some summation-by-parts formulae in one and two space dimensions that are used to derive and analyze the numerical schemes. Everything extends straightforwardly to 3D. We make extensive use of the notation and results for cell-centered functions from [39, 40]. The reader is directed to those references for more complete details.
In 1D we will work on the interval \(\Omega = (0,L)\), with \(L = m\cdot h\), and in 2D, we work with the rectangle \(\Omega = (0,L_1)\times (0,L_2)\), with \(L_1 = m\cdot h\) and \(L_2 = n\cdot h\), where \(m\) and \(n\) are positive integers and \(h>0\) is the spatial step size. Define \(p_r := (r-\frac{1}{2})\cdot h\), where \(r\) takes on integer and half-integer values. For any positive integer \(\ell \), define \(E_\ell = \left\{ p_r \ |\ r=\frac{1}{2},\ldots , \ell +\frac{1}{2}\right\} ,C_\ell = \left\{ p_r \ |\ r=1,\ldots , \ell \right\} ,C_{\overline{\ell }} = \left\{ p_r\cdot h\ |\ r=0,\ldots , \ell +1\right\} \). We need the 1D grid function spaces
and the 2D grid function spaces
We use the notation \(\phi _{i,j} := \phi \left( p_i,p_j\right) \) for cell-centered functions, i.e., those in the space \({\mathcal C}_{m\times n}\). In component form east-west edge-centered functions, i.e., those in the space \({\mathcal E}^\mathrm{ew}_{m\times n}\), are identified via \(u_{i+\frac{1}{2},j}:=u(p_{i+\frac{1}{2}},p_j)\). In component form north-south edge-centered functions, i.e., those in the space \({\mathcal E}^\mathrm{ns}_{m\times n}\), are identified via \(u_{i+\frac{1}{2},j}:=u(p_{i+\frac{1}{2}},p_j)\). The functions of \({\mathcal V}_{m\times n}\) are called vertex-centered functions. In component form vertex-centered functions are identified via \(f_{i+\frac{1}{2},j+\frac{1}{2}}:=f(p_{i+\frac{1}{2}},p_{j+\frac{1}{2}})\). The 1D cell-centered and edge-centered functions are easier to express.
We will need the 1D grid inner-products \(\left( \, \cdot \, | \, \cdot \, \right) \) and \(\left[ \, \cdot \, \Vert \, \cdot \, \right] \) and the 2D grid inner-products \(\left( \, \cdot \, \Vert \, \cdot \, \right) \), \(\left[ \, \cdot \, \Vert \, \cdot \, \right] _\mathrm{ew}\), \(\left[ \, \cdot \, \Vert \, \cdot \, \right] _\mathrm{ns}\) that are defined in [39, 40].
We shall say the cell-centered function \(\phi \in {\mathcal C}_{m\times n}\) is periodic if and only if, for all \(p,\, q\in \mathbb {Z}\),
Here we have abused notation a bit, since \(\phi \) is not explicitly defined on an infinite grid. Of course, \(\phi \) can be extended as a periodic function in a perfectly natural way, which is the context in which we view the last definition. Similar definitions are implied for periodic edge-centered and vertex-centered grid functions. The 1D and 3D cases are analogous and are suppressed.
The reader is referred to [39, 40] for the precise definitions of the edge-to-center difference operators \(d_x : {\mathcal E}_{m\times n}^\mathrm{ew}\rightarrow {\mathcal C}_{m\times n}\) and \(d_y : {\mathcal E}_{m\times n}^\mathrm{ns}\rightarrow {\mathcal C}_{m\times n}\); the \(x\)—dimension center-to-edge average and difference operators, respectively, \(A_x,\, D_x: {\mathcal C}_{m\times n}\rightarrow {\mathcal E}_{m\times n}^\mathrm{ew}\); the \(y\)—dimension center-to-edge average and difference operators, respectively, \(A_y,\, D_y: {\mathcal C}_{m\times n}\rightarrow {\mathcal E}_{m\times n}^\mathrm{ns}\); and the standard 2D discrete Laplacian, \(\Delta _h: {\mathcal C}_{m \times n}\rightarrow {\mathcal C}_{m\times n}\).These operators have analogs in 1D and 3D that should be clear to the reader.
We will use the grid function norms defined in [39, 40]. The reader is referred to those references for the precise definitions of \(\left\| \, \cdot \, \right\| _2,\left\| \, \cdot \, \right\| _\infty , \left\| \, \cdot \, \right\| _p (1\le p < \infty ), \left\| \, \cdot \, \right\| _{0,2}, \left\| \, \cdot \, \right\| _{1,2}\), and \(\left\| \phi \right\| _{2,2}\). We will specifically use the following inverse inequality in 2D: for any \(\phi \in {\mathcal C}_{m\times n}\) and all \(1\le p < \infty \)
Again, the analogous norms in 1D and 3D should be clear.
Using the definitions given in this appendix and in [39, 40], we obtain the following summation-by-parts formulae whose proofs are simple:
Proposition 6.1
If \(\phi \in {\mathcal C}_{m\times n}\) and \(f\in {\mathcal E}_{m\times n}^\mathrm{ew}\) are periodic then
and if \(\phi \in {\mathcal C}_{m\times n}\) and \(f\in {\mathcal E}_{m\times n}^\mathrm{ns}\) are periodic then
Proposition 6.2
Let \(\phi ,\, \psi \in {\mathcal C}_{\overline{m}\times \overline{n}}\) be periodic grid functions. Then
Proposition 6.3
Let \(\phi ,\, \psi \in {\mathcal C}_{m \times n}\) be periodic grid functions. Then
Analogs in 1D and 3D of the summation-by-parts formulae above are straightforward.
Appendix B: Proof of Lemma 2.2
Our goal in this section is to prove Lemma 2.2. We will need the following well-known result, whose proof we omit for the sake of brevity.
Lemma 7.1
Suppose that \(\phi \in {\mathcal C}_{m\times n}\) is periodic and of mean zero, i.e., \(\left( \phi \Vert \mathbf{1} \right) = 0\). Then, \(\phi \) satisfies a discrete Poincare-type inequality of the form
for some \(C>0\) that is independent of \(h\) and \(\phi \).
Analogous results also hold for 1D and 3D grid functions. Now, we state and prove and estimate bounding the discrete 4-norm.
Lemma 7.2
Suppose that \(\left\| \phi \right\| \in {\mathcal C}_{m\times n}\) is periodic and of mean zero, i.e., \(\left( \phi \Vert \mathbf{1} \right) = 0\). Then,
for some constant \(C_{10}>0\) that is independent of \(h\).
Proof
Appealing to Lemma 6 of [40], we have
for any \( 1\le i\le m\) and any \(1\le j\le n\). Then
Since \(\phi \) is periodic and of mean zero, it satisfies the discrete Poincare-type inequality (7.1). Using this and the Cauchy-Schwartz inequality, we have
The result follows. \(\square \)
Remark 7.3
It is easy to conclude a 1D version of the previous Lemma as a corollary: if \(\phi \in {\mathcal C}_m\) is periodic and of mean zero, i.e., \(\left( \phi | \mathbf{1} \right) = 0\), then,
This result is not optimal in 1D. We claim that for 1D and 3D cases, we can derive the following, dimension-dependent estimates: if \(\phi \) is mean zero and periodic, then
The continuous space versions of estimates of these type can be found in the book by Temam [35].
Now we prove a 1D version of Lemma 2.2. The extension to 2D and 3D will follow by similar arguments, working dimension-by-dimension.
Lemma 7.4
Suppose \(\phi ,\, \psi \in \mathcal {C}_{n}\) are periodic with equal means, i.e., \(\left( \phi -\psi | \mathbf{1} \right) =0\). Suppose that \(\phi \) and \(\psi \) are in the class of grid functions satisfying
where \(C_{11}\) is an \(h\)-independent positive constant. Then there exists a positive constant \(C_{12}\) that depends only on \(C_{10}\) and \(C_{11}\) such that
Proof
Using summation-by-parts,
where \(\Delta _h\) is the 1D discrete lapacian and \(D\) is the center-to-edge difference [39, 40]. Denote
Then \(D \phi ^3_{i+\frac{1}{2}} = \mathbb {A}\phi _{i+\frac{1}{2}}D\phi _{i+\frac{1}{2}}\) and \(D \psi ^3_{i+\frac{1}{2}} = \mathbb {A}\psi _{i+\frac{1}{2}}D\psi _{i+\frac{1}{2}}\), and, furthermore,
By adding and subtracting \(\mathbb {A}\psi D\phi \), we have
Observing that \(\mathbb {A}\psi \ge 0\) and
yields
Using the definitions, and Cauchy’s inequality, one can show
Now, define
so that, applying the Cauchy-Schwartz inequality, we have
The definition of \(\mathbb {H}_{i+\frac{1}{2}}\) shows that
Thus by the definition of \(\left[ \cdot \Vert \cdot \right] \) and using periodicity, we get
Similarly,
where we are using the 1D norms: \(\left\| \phi \right\| ^p_p = h\sum _{i=1}^m |\phi _i|^p\). Thus
Combining the above results, we have
We now recall Lemma 7.2, specifically the (non-optimal) 1D estimate (7.7). Under the condition \(\left( \phi -\psi | 1 \right) =0\), we have
Therefore,
Observe that \(M\) is independent of \(h\) and depends upon \(C_{10}\) and \(C_{11}\).
To finish up, we use the Young inequality
with the choices \(p\!=\!4,q\!=\!\frac{4}{3},a \!=\! \left( \frac{3}{4} \alpha ^{-1} \right) ^{\frac{3}{4}} M \left\| \phi \!-\!\psi \right\| _2^{\frac{1}{2}}, b \!=\! \left( \frac{4}{3} \alpha \right) ^{\frac{3}{4}} \left\| D\left( \phi \!-\!\psi \right) \right\| _2^{\frac{3}{2}}\). We obtain
The result is proven by taking \(C_{12} = \frac{1}{4} M^4 \cdot \left( \frac{3}{4} \right) ^3\). \(\square \)
Remark 7.5
The form of the derived inequality (7.11) is valid for both of the 1D and 2D cases. For the 3D case, a combination of (7.9) and the estimates like those derived above leads to the following result
the only changes being the \(\alpha ^7\) replaces \(\alpha ^3\) and we use the triple summation \(\left( \, \cdot \, | \! | \! | \, \cdot \, \right) \). As a result, an unconditional \(\ell ^\infty (0,T; \ell ^2)\) convergence in 3D can be derived in the same manner. The details are omitted in this paper for the sake of brevity.
Appendix C: Proof of Lemma 2.3
Our goal in this appendix is to prove Lemma 2.3. We will do this by proving the 1D version and leaving the 2D argument to the reader. Suppose \(\psi \in {\mathcal C}_m\) and \(f \in {\mathcal E}_m\) are periodic grid functions. Then \(\left[ f \star \psi \right] : {\mathcal E}_m \times {\mathcal C}_m \rightarrow {\mathcal C}_m\)is defined component-wise as follows
Note very carefully that the order is important in the definition of the discrete convolution \(\left[ \, \cdot \, \star \, \cdot \, \right] \).
Lemma 8.1
Suppose \(\phi , \psi \in \mathcal {C}_{n}\) are periodic. Assume that \(\mathsf {f} \in C_\mathrm{per}^\infty (0,L)\) is even and set \(f_{i+\frac{1}{2}} := \mathsf {f}\left( p_{i+\frac{1}{2}}\right) \), so that \(f\in \mathcal {E}_m\). Then, for any \(\alpha >0\),
for some \(C>0\) that depends upon \(\mathsf {f}\), but is independent of \(h\).
Proof
Using summation-by-parts and the periodic boundary conditions,
By definition, and using periodicity,
where \(D\) is the center-to-edge difference and \(d\) is the edge-to-center difference [39, 40]. Then, using periodicity, Cauchy’s inequality, and summation shifts, we have
for any \(\beta >0\). Here we have used the fact that
which follows by a consistency argument. The result is completed by taking \(\beta = \frac{\alpha }{LC}\). \(\square \)
Rights and permissions
About this article
Cite this article
Guan, Z., Wang, C. & Wise, S.M. A convergent convex splitting scheme for the periodic nonlocal Cahn-Hilliard equation. Numer. Math. 128, 377–406 (2014). https://doi.org/10.1007/s00211-014-0608-2
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00211-014-0608-2