
Abstract
We consider the numerical solution of a nonlinear evolutionary variational inequality, arising in the study of quasistatic contact problems. We study spatially semi-discrete and fully discrete schemes for the problem with several discontinuous Galerkin discretizations in space and finite difference discretization in time. Under appropriate regularity assumptions on the solution, a unified error analysis is established for the schemes, reaching the optimal convergence order for linear elements. Numerical results are presented on a two dimensional test problem to illustrate numerical convergence orders.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Contact phenomena among deformable bodies or between deformable and rigid bodies abound in industry and daily life; they play an important role in structural and mechanical systems. Therefore, a considerable effort has been made in modeling and numerical simulations of contact processes. The well-known Signorini problem is an elastostatic problem describing the contact of a deformable body with a rigid frictionless foundation [16]. In early mathematical publications on contact problems, only static processes were studied. More recently, contact problems are studied involving viscoelastic and viscoplastic materials, leading to one type of time dependent models, known as quasistatic contact problems. These problems describe slowly evolving frictional contact processes among deformable bodies under various contact and friction conditions [15].
In this paper, we extend the ideas presented in [18] where discontinuous Galerkin (DG) methods for the Signorini problem were studied, to solve quasistatic contact problem. In the past two decades, DG methods have been widely used for solving many kinds of mathematical and physical problems due to the flexibility in constructing feasible local shape function spaces and the advantage to capture non-smooth or oscillatory solutions effectively. DG methods provide discontinuous approximations by using the Galerkin method element by element, and information is transferred between two neighboring elements through the use of numerical traces (numerical fluxes). One of the main advantages is the increase of locality in discretization, which is ideally suited for parallel computing. In addition, DG methods permit an easy treatment of nonhomogeneous boundary conditions, which greatly increases the robustness and accuracy of any boundary condition implementation. We refer to [10] and the references therein for a historical survey about DG methods.
In [12, 13], a DG formulation and algorithm for gradient plasticity problem, in the form of a quasistatic variational inequality of the second kind, was developed and analyzed. In [17], the ideas in [1] were extended to solving an obstacle problem and a simplified friction problem; a priori error estimates were established for these methods, which reach optimal order for linear elements. The discontinuous property makes DG methods easy to handle elements of arbitrary shapes and irregular meshes with hanging nodes, and flexible to construct local shape function spaces (\(hp\)-adaptivity). In [19], a posteriori error estimators of residual type were derived on DG methods for an obstacle problem, and an \(h\)-adaptive DG algorithm was proposed for solving the obstacle problem based on the a posteriori error analysis. In [18], ideas in [17] were extended to solve the Signorini problem through DG methods with linear elements and optimal order error estimate was derived. We will extend the ideas therein to solving the quasistatic contact problem with DG methods. A priori error analysis will be presented for these methods, which reaches optimal convergence order for linear elements.
The paper is organized as follows. In Sect. 2, we introduce the quasistatic contact problem and DG formulations for solving it; moreover, spatially semi-discrete approximation and fully discrete approximation are given. In Sect. 3, we first prove the consistency of the DG schemes, boundedness and stability of the bilinear forms, then we establish a priori error estimates for spatially semi-discrete approximation with these DG methods. Error analysis for fully discrete approximation is given in Sect. 4. In the final section, we present numerical results on a test problem, paying particular attention to numerical convergence orders with different choices of penalty constants in the DG schemes.
2 Quasistatic contact problem and DG formulations
2.1 Quasistatic contact problem and its weak formulation
The quasistatic contact problem is used to describe slowly evolving frictional contact process of a linearly elastic body occupying a Lipschitz domain \(\Omega \subset \mathbb{R }^d\) (\(d=2,3\)). The boundary \(\Gamma \) is divided into three parts \(\overline{\Gamma _D}\), \(\overline{\Gamma _F}\) and \(\overline{\Gamma _C}\) with \(\Gamma _D\), \(\Gamma _F\) and \(\Gamma _C\) relatively open and mutually disjoint such that \(\mathrm{meas}\,(\Gamma _D)>0\). Let \(t\in [0,T]\) be the time variable for some \(T>0\). Denote by \({{\varvec{u}}}(\cdot ,t):\Omega \rightarrow \mathbb{R }^d\) a displacement variable. The linearized strain tensor
and stress tensor \({\varvec{\sigma }}\) are second order symmetric tensors, which take values in \(\mathbb{S }^d\), the space of second order symmetric tensors on \(\mathbb{R }^d\) with the inner product \({\varvec{\sigma }}:{\varvec{\tau }}=\sum _{i,j=1}^d\sigma _{ij}\tau _{ij}\) and norm \(|{\varvec{\tau }}| = ({\varvec{\tau }}:{\varvec{\tau }})^\frac{1}{2}\). Let \({\varvec{\nu }}\) be the unit outward normal vector on \(\Gamma \). For a vector \({\varvec{v}}\), denote its normal component and tangential component by \(v_{\nu }={\varvec{v}}\cdot {\varvec{\nu }}\) and \({\varvec{v}}_{\tau }={\varvec{v}}-v_{\nu }{\varvec{\nu }}\) on the boundary. Similarly for a tensor-valued function \({\varvec{\sigma }}:\Omega \rightarrow \mathbb{S }^d\), we define its normal component and tangential component by \(\sigma _{\nu }=({\varvec{\sigma }}{\varvec{\nu }})\cdot {\varvec{\nu }}\) and \({\varvec{\sigma }}_{\tau } ={\varvec{\sigma }}{\varvec{\nu }}-\sigma _{\nu }{\varvec{\nu }}\), respectively. We have the decomposition formula
For a tensor-valued function \({\varvec{\sigma }}\), define its divergence by
Then, for any symmetric tensor \({\varvec{\sigma }}\) and any vector field \({\varvec{v}}\), both being continuously differentiable over \(\overline{\Omega }\), we have the following integration by parts formula
For the quasistatic contact problem, the displacement field \({{\varvec{u}}}:\Omega \times [0,T]\rightarrow \mathbb{R }^d\) and the stress field \({\varvec{\sigma }}:\Omega \times [0,T]\rightarrow \mathbb{S }^d\) satisfy the relations
Here, (2.2) is the constitutive relation of the elastic material, where \(\mathcal{C } : \Omega \times \mathbb{S }^d\rightarrow \mathbb{S }^d\) denotes the fourth-order elasticity tensor of the material, and is assumed to be bounded, symmetric and positive definite in \(\Omega \), i.e.
If the elastic behavior of the material is homogeneous and isotropic, then the elasticity tensor is given by
where \(\lambda >0\) and \(\mu >0\) are Lamé coefficients. In the equilibrium equation (2.3), \({{\varvec{f}}}_1\) is the density of the volume forces. Boundary condition (2.4) means that the body is clamped on \(\Gamma _D\) and so the displacement field vanishes there all the time. Surface traction of density \({{\varvec{f}}}_2\) acts on \(\Gamma _F\times (0,T)\) in (2.5). On \(\Gamma _C\times (0,T)\), we assume the contact is bilateral (no loss of contact during the process) and the friction is modeled with Tresca’s friction law (see, e.g., [15]):
where \(g\ge 0\) represents the friction bound function. Note that
from the boundary conditions (2.4) and (2.9).
To provide a variational formulation of the contact problem (2.2)–(2.9), we introduce a Hilbert space
with the inner product and norm defined by
Since \(\mathrm{meas}(\Gamma _D)>0\), Korn’s inequality holds [6], implying that \(\Vert \cdot \Vert _V\) is a norm on \(V\), equivalent to the standard \([H^1(\Omega )]^d\) norm on \(V\). For the force densities, assume
and for the friction bound function, assume
We define a bilinear form \(a(\cdot ,\cdot )\) over \(V\) by
a functional \(j: V\rightarrow \mathbb{R }^+\) by
and \({\varvec{\ell }}(t)\), an element of \(V\) given by
We know that \({\varvec{\ell }}(t)\in W^{1,\infty }(0,T;V)\) [15]. Assume the initial data satisfies
Following a standard argument [15], we can obtain the variational formulation of the quasistatic contact problem (2.2–2.9): Find \({{\varvec{u}}}: [0,T]\rightarrow V\) s.t. for \(\mathrm{a.e.}\ t\in (0,T)\),
Under the assumptions (2.7), (2.12), (2.13) and (2.16), this problem has a unique solution \({{\varvec{u}}}\in W^{1,\infty }(0,T;V)\), moreover, the mapping \(({\varvec{\ell }},{{\varvec{u}}}_0)\mapsto {{\varvec{u}}}\) is Lipschitz continuous from \(W^{1,\infty }(0,T;V)\times V\) to \(L^{\infty }(0,T;V)\) [15].
2.2 Notations and DG formulations
For brevity, in the following, we only consider the case \(d=2\), although the discussion can be extended to the three dimensional case without problem. Given a bounded domain \(D\subset \mathbb{R }^2\) and a positive integer \(m, H^m(D)\) is the Sobolev space with the usual corresponding norm \(\Vert \cdot \Vert _{m,D}\) and semi-norm \(|\cdot |_{m,D}\). Let \({{\varvec{u}}}=(u_1,u_2)^T\in [H^m(D)]^2\) and define the corresponding norm by \(\Vert {{\varvec{u}}}\Vert _{m,D}^2=\sum _{i=1,2}\Vert u_i\Vert _{m,D}^2\) and semi-norm by \(|{{\varvec{u}}}|_{m,D}^2=\sum _{i=1,2}|u_i|_{m,D}^2\). Similarly, \({\varvec{\tau }}\in [L^2(\Omega )]^{2\times 2}_s\) is a matrix-valued function with each component \(\tau _{ij}\in L^2(\Omega )\) and \(\tau _{12} = \tau _{21}\). We assume \(\Omega \) is a polygonal domain and consider a regular family of triangulations \(\{\mathcal{T }_h\}_h\) of \(\overline{\Omega }\) that is compatible with the boundary splitting: \(\Gamma =\overline{\Gamma _D}\cup \overline{\Gamma _F}\cup \overline{\Gamma _C}\), i.e., if an element edge has a non-empty intersection with one of the sets \(\Gamma _D, \Gamma _F\) and \(\Gamma _C\), then the edge lies entirely in the corresponding closed set \(\overline{\Gamma _D}\), \(\overline{\Gamma _F}\), or \(\overline{\Gamma _C}\). Let \(h_K =\mathrm{diam}(K)\), \(h = \max \{h_K: K\in \mathcal{T }_h\}\), and \(h_e =\mathrm{length}(e)\). Denote by \({\mathcal{E }}_h\) the union of the boundaries of the elements \(K\) of \(\mathcal{T }_h, \mathcal{E }_h^i=\mathcal{E }_h \backslash \Gamma \) the set of all interior edges, and \(\mathcal{E }_h^0=\mathcal{E }_h \backslash (\Gamma _F\cup \Gamma _C)\). We introduce the following finite element spaces:
Here \(P_l(K)\) stands for the set of all polynomials in \(K\) with the total degree no more than \(l\ge 0\). We know that \(v^{h}_{\nu } = 0\) at all nodes on \(\overline{\Gamma _C}\) guarantees \(v^{h}_{\nu } = 0\) on \(\Gamma _C\), consequently \(\dot{v}^{h}_{\nu } = 0\) on \(\Gamma _C\). For any vector-valued function \({\varvec{v}}\) and matrix-valued function \({\varvec{\tau }}, {\varvec{\varepsilon }}^h({\varvec{v}})\) and \(\mathrm{div}^h {\varvec{\tau }}\) are defined by the relation \({\varvec{\varepsilon }}^h({\varvec{v}})={\varvec{\varepsilon }}({\varvec{v}})\) and \(\mathrm{div}^h {\varvec{\tau }}=\mathrm{div}{\varvec{\tau }}\) on any element \(K\in {\mathcal{T }}_h\).
Let \(e\) be the common edge of two elements \(K^+\) and \(K^-\), and \({{\varvec{n}}}^{\alpha } = {{\varvec{n}}}|_{\partial K^{\alpha }}\) be the unit outward normal vector on \(\partial K^{\alpha }\) with \(\alpha =\pm \). For a scalar function \(q\), let \(q^{\alpha } = q|_{\partial K^{\alpha }}\) and similarly, for a vector-valued function \({\varvec{v}}\) and a matrix-valued function \({\varvec{\tau }}\), let \({\varvec{v}}^{\alpha }\) = \({\varvec{v}}|_{\partial K^{\alpha }}, {\varvec{\tau }}^{\alpha } = {\varvec{\tau }}|_{\partial K^{\alpha }}\). Then define the averages \(\{\cdot \}\) and the jumps \([\cdot ]\), \([\![\cdot ]\!]\) on \(e\in {\mathcal{E }}_h^i\) by
Here \({{\varvec{u}}}\otimes {\varvec{v}}\) is a matrix with \(u_iv_j\) as its \((i,j)\)th element. If \(e\in \mathcal{E }_h\) is an element edge on \(\Gamma \), we set
For a vector-valued function \({\varvec{v}}\) and a matrix-valued function \({\varvec{\tau }}\), with a direct manipulation, we have
The lifting operators \({{\varvec{r}}}_0: \left( L^2(\mathcal E _h^0)\right) ^{2\times 2}_s\rightarrow W_h\), \({{\varvec{r}}}_e:\left( L^2(e)\right) ^{2\times 2}_s\rightarrow W_h\) are defined by
It is easy to check that the following identity and inequality hold
We now present some DG formulations for the quasistatic contact problem (2.2)–(2.9). For this purpose, we multiply the Eqs. (2.2) and (2.3) by \(\mathcal{C }^{-1}{\varvec{\tau }}\) and \({\varvec{v}}\), respectively, integrate on an arbitrary element \(K\), and apply the integration by parts formula (2.1),
In above equations, we append superscript \(h\) on \({\varvec{\sigma }}, {\varvec{\tau }}, {{\varvec{u}}}, {\varvec{v}}, \mathrm{div}\) and \({\varvec{\varepsilon }}\), add over all the elements, and use numerical trace \(\widehat{{{\varvec{u}}}^h}\) and \(\widehat{{\varvec{\sigma }}^h}\) to approximate \({{\varvec{u}}}\) and \({\varvec{\sigma }}\) over element edges to obtain
for all \(({\varvec{\tau }}^h,{\varvec{v}}^h)\in W^h\times V^h\). The numerical traces \(\widehat{{\varvec{\sigma }}^h}\) and \(\widehat{{{\varvec{u}}}^h}\) will be selected to guarantee consistency and stability of the scheme.
To derive a new formulation which does not rely on \({\varvec{\sigma }}^h\) explicitly, using (2.1) and (2.19), we have from (2.25) and (2.26) that
From now on, we assume the elasticity tensor \(\mathcal{C }\) is constant. Then, we have \(\mathcal{C } {\varvec{\varepsilon }}^h({\varvec{v}}^h)\in W^h\). Choosing \({\varvec{\tau }}^h=\mathcal{C } {\varvec{\varepsilon }}^h({\varvec{v}}^h)\) in (2.27), we get
Combination of this equation and (2.28) yields
We can get DG schemes from (2.29) by proper choices of numerical fluxes \(\widehat{{\varvec{\sigma }}^h}\) and \(\widehat{{{\varvec{u}}}^h}\), respecting three requirements: conservation, consistency, and stability. Conservation requires the numerical fluxes to be single-valued over all edges; consistency of the numerical fluxes needs \(\widehat{{{\varvec{u}}}^h}({{\varvec{u}}})={{\varvec{u}}}|_{\mathcal{E }_h}\) and \(\widehat{{\varvec{\sigma }}^h}({\varvec{\sigma }})={\varvec{\sigma }}|_{\mathcal{E }_h}\); stability is not easily ensured and it is usual to add a suitable penalty term (stability term) to guarantee it. We will introduce four consistent and stable DG methods. For all the following DG methods, we let \(\widehat{{{\varvec{u}}}^h}\) and \(\widehat{{\varvec{\sigma }}^h}\) satisfy the boundary condition (2.9), i.e.,
Choose
where \(\eta \) is a positive, bounded, piecewise constant function on \(\mathcal{E }_h^0\), and \(\widetilde{h}\) is a piecewise constant function on \(\mathcal{E }_h^0\) with \(\widetilde{h}|_e=h_e\) for \(e\in \mathcal{E }_h^0\). Denote \(\eta _e=\eta |_e, e\in \mathcal{E }_h^0\). Then we obtain from (2.29) that
where
Let \({\varvec{v}}^h = {{\varvec{w}}}^h - \dot{{{\varvec{u}}}}^h\) with \({{\varvec{w}}}^h\in V^h\). Using (2.30), we can derive from the Eq. (2.31) that (see also [15])
The penalty term in \(B_{1,h}^{(1)}({{\varvec{u}}}^h,{\varvec{v}}^h)\) is \(\int _\mathcal{E _{h}^0}\eta \widetilde{h}^{-1}[\![{{\varvec{u}}}^h ]\!]:[\![{\varvec{v}}^h]\!]\,ds\) and (2.33) is an interior penalty (IP) formulation [14]. With the lift operator \({{\varvec{r}}}_0\), we can rewrite \(B_{1,h}^{(1)}\) as
Notice that (2.32) and (2.34) are equivalent on \(V^h\), implying that either one can be used to define the numerical solution \({{\varvec{u}}}^h\). In this paper, we give a priori error estimate for the first formula (2.32). Because (2.32) and (2.34) are equivalent on \(V^h\), we will prove the stability for the second formula \(B_{2,h}^{(1)}\) on \(V^h\), which guarantees the stability for the first formulation \(B_{1,h}^{(1)}\) on \(V^h\). This comment is valid for the other DG methods to be introduced below.
Using the local lifting operator \({{\varvec{r}}}_e\), we can give the second example. Taking
in (2.29), we get
or equivalently,
which is an extension of the method of Brezzi et al. [7].
With the choice
we obtain a DG formulation extended from the method of Bassi et al. [4],
or equivalently,
If we choose
then
or equivalently,
which is an extension of the local DG (LDG) method [11].
Spatially semi-discrete DG approximation. Let \(B_h({{\varvec{u}}}^h,{\varvec{v}}^h)\) be one of the bilinear forms \(B^{(j)}_{1,h}({{\varvec{u}}}^h,{\varvec{v}}^h)\) with \(j=1,\ldots ,4\). Then a spatially semi-discrete DG approximation for the quasistatic contact problem (2.17) is: Find \({{\varvec{u}}}^h :[0,T]\rightarrow V^h\) such that
Here \(P^h_B\) is the \(B_h\)-projection from \(V\) to \(V^h\) defined by
As we will see later, the bilinear form \(B_h\) is bounded (Lemma 3.3) and coercive (Lemma 3.4) on \(V^h\); so \(P^h_B{{\varvec{u}}}_{0}\) exists and is unique.
Fully discrete approximation schemes. In addition to the finite element \(V^h\), we need a partition of the time interval: \([0,T] =\bigcup _{n=1}^{N}[t_{n-1},t_n]\) with \(0=t_0<t_1<\cdots <t_N=T\). Denote \(k_n=t_n-t_{n-1}\) for the length of the sub-interval \([t_{n-1},t_n]\), and \(k=\max _{n}k_n\). We allow an arbitrary partition. For the given function \({{\varvec{f}}}_1\in W^{1,\infty }(0,T;(L^2(\Omega ))^d)\), \({{\varvec{f}}}_2\in W^{1,\infty }(0,T; (L^2(\Gamma _F))^d)\) and the solution \({{\varvec{u}}}\in W^{1,\infty }(0,T;V)\), we use the notation \({{\varvec{u}}}_n = {{\varvec{u}}}(t_n)\) and \({\varvec{\ell }}_n = {\varvec{\ell }}(t_n)\), which are well-defined due to the Sobolev embedding \(W^{1,\infty }(0,T;V) \hookrightarrow C(0,T;V)\). The symbol \(\Delta {{\varvec{u}}}_n\) is used to denote the backward difference \({{\varvec{u}}}_n-{{\varvec{u}}}_{n-1}\), and \(\delta _n {{\varvec{u}}}_n = \Delta {{\varvec{u}}}_n/k_n\) for the backward divided difference. No summation is implied over the repeated index \(n\).
Let \(B_h({{\varvec{u}}}^h,{\varvec{v}}^h)\) be one of the bilinear forms \(B^{(j)}_{1,h}({{\varvec{u}}}^h,{\varvec{v}}^h)\) with \(j=1,\ldots ,4\). Then a fully discrete approximation of (2.17) is: Find \({{\varvec{u}}}^{hk}=\{{{\varvec{u}}}^{hk}_n\}^N_{n=0}\subset V^h\) such that
In the following two sections, we will derive a priori error analysis for the spatially semi-discrete DG approximation and fully discrete approximation schemes, respectively.
3 Error estimates for the spatially semi-discrete approximation
As a preparation for error analysis, we first consider the consistency of the DG schemes, and the boundedness and stability of the bilinear forms.
3.1 Consistency, boundedness and stability
We notice that if the solution of (2.17) has the regularity \({{\varvec{u}}}\in L^{2}(0,T;[H^2(\Omega )]^2)\), then (2.2)–(2.5) and (2.9) are valid a.e., and on any interior edge \(e\), \([\![{{\varvec{u}}}]\!]= \mathbf{0}, \{{{\varvec{u}}}\} = {{\varvec{u}}}, \{{\varvec{\varepsilon }}({{\varvec{u}}})\} = {\varvec{\varepsilon }}({{\varvec{u}}}), [{\varvec{\sigma }}] = \mathbf{0}, \{{\varvec{\sigma }}\} = {\varvec{\sigma }}\). For all DG methods introduced in the previous section, we first show the consistency of the DG schemes.
Lemma 3.1
(Consistency) Assume \({{\varvec{u}}}\in L^{2}(0,T;[H^2(\Omega )]^2)\) for the solution of (2.17). Then for the DG methods \(B_h({{\varvec{w}}},{\varvec{v}})=B_{1,h}^{(j)}({{\varvec{w}}},{\varvec{v}})\) with \(j=1,\ldots ,4\), we have
Proof
Using (2.2), we obtain, for any \({\varvec{v}}^h\in V^h\),
By (2.1), (2.19) and noting that \([{\varvec{\sigma }}]=\mathbf{0}\) on \(\mathcal{E }_h^i\), we get
Then
The last inequality is obtained by (2.9). Hence, (3.1) holds. \(\square \)
To consider the boundedness and stability of the bilinear form \(B_h\), as in [18], let \(V(h) = V^h + V\cap [H^2(\Omega )]^2\), and for \({\varvec{v}}\in V(h)\), define seminorms as follows:
where
Then define norms by
The norm \(|||\cdot |||_*\) defined in (3.2) is equivalent to the usual DG-norm \((|\cdot |_{1,h}^2 + |\cdot |_{*}^2)^{1/2}\), thanks to Korn’s inequality (see [5] or [2, Proposition 4.6]). Here, \(|\cdot |_{1,h}^2 \!=\! \sum _{K\in \mathcal{T }_h}\! | \cdot |_{1,K}^2\). In the following, we also need the norm \(\Vert \cdot \Vert _{0,h}\) defined through the relation \(\Vert \cdot \Vert _{0,h}^2 = \sum _{K\in \mathcal{T }_h} \Vert \cdot \Vert _{0,K}^2\).
Before presenting the boundedness and stability properties of the bilinear forms, we state a useful estimate for the lifting operator \({{\varvec{r}}}_e\), which is a trivial extension to vector-valued functions of Lemma 2 of [8]; see also [18].
Lemma 3.2
For any \({\varvec{v}}\in V(h)\) and \(e\in \mathcal{E }_h^0\),
From (3.3) and (2.22), we have
For boundedness of the primal forms \(B_h\), recalling (2.7) for the boundedness, symmetry and positive definiteness of \(\mathcal{C }\), we know that the seminorm \(|\cdot |_{a,h}\) defined by
is equivalent to \(|\cdot |_{h}\) on \(V(h)\). Then we have the boundedness of \(B_h\) as follows.
Lemma 3.3
(Boundedness) For \(1\le j\le 4, B_h=B_{1,h}^{(j)}\) satisfies
Proof
We use the Cauchy-Schwarz inequality to bound them term by term,
Here “\(\lesssim \cdots \)” stands for “\(\le C\cdots \)”, where \(C\) is a positive generic constant independent of \(h\) and \(k\), which may take on different values at different places. Applying the trace inequality for a scalar function ([3, Exercise 10.3.2]) to each component of a vector function, we can get the trace inequality
Using this inequality, we have
The inequalities (3.5) and (3.9) are needed in the analysis of all bilinear forms. For the DG methods with the bilinear form \(B_{1,h}^{(j)}, j=1, 4\), the inequality (3.7) is needed. The inequality (3.6) is needed by the formulas \(B_{1,h}^{(j)}\) with \(j=2, 4\). For the methods with the bilinear forms \(B_{1,h}^{(j)}\), \(j=2, 3\), the inequality (3.8) is needed. Proof for the boundedness of \(B_h\) is completed. \(\square \)
For the stability, note that \(|||{\varvec{v}}|||=|||{\varvec{v}}|||_*\) for any \({\varvec{v}}\in V^h\). Denote
Since \(B_{1,h}^{(j)}\) and \(B_{2,h}^{(j)}\) coincide on \(V^h\), once we have proved the stability for \(B_{2,h}^{(j)}\) on \(V^h\), the stability of \(B_{1,h}^{(j)}\) on \(V^h\) follows. We use the Cauchy-Schwarz inequality and Lemma 3.2 to get
Here \(0<\epsilon <1\) is a constant and \(C_2\) is the positive constant in (3.3). Therefore, stability is valid for the IP method when \(\eta _0> 3C_2\). For other bilinear forms, we can similarly obtain
For \(B_{2,h}^{(2)}, \eta _0>3C_2(\epsilon ^{-1}-1)/C_1\) ensures stability holds, letting \(\epsilon \) be close to 1, we see that \(\eta _0>0\) is sufficient for the stability. It is easy to see that stability is valid for \(B_{2,h}^{(3)}\) when \(\eta _0>3C_2/C_1\). For \(B_{2,h}^{(4)}\), it is clear that stability holds when \(\eta _0>0\). For convenience, we define the following conditions on \(\eta _0\) of (3.10):
We summarize the above argument in the next result.
Lemma 3.4
(Stability) Assume (3.11). Then for \(1\le j\le 4\), \(B_h=B_{1,h}^{(j)}\) and \(B_{2,h}^{(j)}\) satisfy
From now on, we will assume the conditions (3.11) on \(\eta \).
3.2 Error analysis
Denote by \(\Pi ^h{{\varvec{u}}}\in V^h\) the usual continuous piecewise linear interpolant of the exact solution \({{\varvec{u}}}(t)\in [H^2(\Omega )]^2\), \(t\in [0,T]\). Then \([\![{{\varvec{u}}}-\Pi ^h{{\varvec{u}}}]\!]=\mathbf{0}\) on the interelement boundaries. By the definition of norm (3.2), we have the approximation property
To extend the analysis to nonconforming meshes, it is convenient to take an interpolant \(\Pi ^h{{\varvec{u}}}\) which is discontinuous across the interelement boundaries. Then, we just require the local approximation property
hence, for the global approximation error, we have
Similarly,
Next, we introduce another interpolation of \({{\varvec{u}}}\).
Lemma 3.5
Assume (3.11) and \({{\varvec{u}}}(t),\dot{{{\varvec{u}}}}(t)\in V\cap [H^2(\Omega )]^2\). Define \({{\varvec{u}}}^I(t)\in V^h\) by
Then
Proof
First we notice that because the bilinear form \(B_h = B_{1,h}^{(j)}\) with \(j=1,\ldots ,4\) is bounded and coercive on \(V^h, {{\varvec{u}}}^I(t)\) is well defined. Letting \({\varvec{v}}^h = {{\varvec{u}}}^I(t) - \Pi ^h{{\varvec{u}}}(t)\) in (3.15), we get
Notice that \({{\varvec{u}}}^I(t)-\Pi ^h{{\varvec{u}}}(t)\in V^h\). We obtain
Then
By the triangle inequality, we have
which completes the proof for the first inequality in (3.16). The second inequality can be obtained by differentiating (3.15) with respect to time,
and by repeating the argument in proving the first inequality. \(\square \)
Note that \({{\varvec{u}}}^I(0) = P^h_B{{\varvec{u}}}_{0}\). Thus,
Now we write the error as
In the next result, we need some additional solution regularity assumption. We express the contact boundary \(\overline{\Gamma _C}\) as the union of some line segments:
Theorem 3.6
Assume (3.11). Let \({{\varvec{u}}}\) and \({{\varvec{u}}}^h\) be the solutions of (2.17)–(2.18) and (2.35)–(2.36), respectively. Assume \({{\varvec{u}}}\in L^{2}(0,T;[H^2(\Omega )]^2)\), \(\dot{{{\varvec{u}}}}\!\in \! L^{2}(0,T;[H^2(\Omega )]^2)\) and \(\dot{{{\varvec{u}}}}|_{\Gamma _i}\in L^{2}(0,T;[H^2(\Gamma _i)]^2)\) for \(1\le i\le i_0\). Then for the DG methods with \(j=1,\ldots ,4\), we have
Proof
Let \({\varvec{v}}^h = \dot{{{\varvec{u}}}}^h(t)\) in (3.1). Combining with (2.35), we obtain for all \({\varvec{v}}^h\in V^h\),
Using (3.19) and (3.15), we have
where
By the boundedness of the bilinear form \(B_h\), we get
We turn to bound \(T_3\). Note that on an interior edge, \([\![{{\varvec{u}}}]\!]=\mathbf{0}, \{{{\varvec{u}}}\}={{\varvec{u}}}\), \(\{{\varvec{\sigma }}\}={\varvec{\sigma }}\), and on \(\Gamma _D\), \([\![{{\varvec{u}}}]\!]=\mathbf{0}\). Then
Since \([{\varvec{\sigma }}]=\mathbf{0}\) on an interior edge and remembering (2.3), we have
Then
Hence, we get
Then we obtain by (3.20), (3.21), (3.22) and (3.24),
Integrating the above inequality from 0 to \(t\), applying Gronwall’s inequality, and using the stability of the bilinear form \(B_h\), we obtain
where in the last equality, the condition (3.17) was used.
Choosing \({\varvec{v}}^h(t) = \Pi ^h\dot{{{\varvec{u}}}}(t)\) in (3.25), we get
we obtain
Finally, by the triangle inequality
we get the error bound (3.18). \(\square \)
4 Error estimates for fully discrete approximation
In this section, we analyze the fully discrete schemes. First, we show the well-posedness of problem (2.37)–(2.38).
Theorem 4.1
Assume (3.11). The problem (2.37)–(2.38) admits a unique solution \({{\varvec{u}}}^{hk}\), which is stable in the sense that for given \({{\varvec{u}}}_{1,0}, {{\varvec{u}}}_{2,0}\in V\) and \({\varvec{\ell }}_1, {\varvec{\ell }}_2 \in W^{1,\infty }(0,T;V)\), the corresponding solutions \({{\varvec{u}}}^{hk}_{1,n}\) and \({{\varvec{u}}}^{hk}_{2,n}, 0\le n\le N\), satisfy the inequality
Proof
Because \(j\) is positively homogeneous, the inequality (2.37) can be rewritten as
This inequality problem admits a unique solution \(\Delta {{\varvec{u}}}_n^{hk}\in V^h\) by the boundedness and stability of the bilinear form \(B_h\).
Then we turn to deduce the inequality (4.1). With \(n=1,2,\ldots ,N\), we have
Denote \({{\varvec{e}}}_n={{\varvec{u}}}_{1,n}^{hk} - {{\varvec{u}}}_{2,n}^{hk}\). Taking \({\varvec{v}}^h = \delta _n{{\varvec{u}}}_{2,n}^{hk}\) in (4.2) and \({\varvec{v}}^h = \delta _n{{\varvec{u}}}_{1,n}^{hk}\) in (4.3), and adding the two inequalities, we obtain
We can get the lower bound as
Then for \(1\le n\le N\), we obtain
A simple induction yields
Let \(M=\max _n |||{{\varvec{e}}}_{n} |||\). Then we obtain
Therefore,
Applying the following inequality
we then obtain the stability inequality (4.1). \(\square \)
Now we show error estimates for the fully discrete scheme. Define \({{\varvec{e}}}_n={{\varvec{u}}}_{n} - {{\varvec{u}}}_{n}^{hk}\) for \(n=1,2,\ldots ,N\). We have
where \({{\varvec{u}}}_n^I = {{\varvec{u}}}^I(t)\). Denote
As (4.4), we have
For an upper bound of \(A_n^h\), write
where \({\varvec{v}}^h_n\in V^h\) is arbitrary. We take \({\varvec{v}}^h=\delta _n{{\varvec{u}}}_{n}^{hk}\in V^h\) in (3.1) at \(t=t_{n}\) to get
Combining the above inequality with (2.37), we have
In Eq. (4.6), inserting \(B_h({{\varvec{u}}}_n^{I},\delta _n{{\varvec{u}}}_n^{I}-{\varvec{v}}^h_n)-B_h({{\varvec{u}}}_n^{I},\delta _n{{\varvec{u}}}_n^{I}-{\varvec{v}}^h_n)\) and applying (4.7), we get
where
From the lower bound (4.5) and the upper bound (4.8), we obtain inequality
Here, \(M=\max _n |||{{\varvec{e}}}_{n}^h |||\). By an induction, we get
Noticing that
and
we have
Using the relation
we obtain from (4.10) that
By (3.16), we know that
From Taylor’s theorem, we have
Then
where
Choose \({\varvec{v}}^{h}_j = \Pi ^h\dot{{{\varvec{u}}}}_{j}\), then \(|||\dot{{{\varvec{u}}}}_{j}^I-\Pi ^h\dot{{{\varvec{u}}}}_{j}|||\lesssim h\). To estimate the term \(|R_j({{\varvec{u}}}_{j},{\varvec{v}}^h_j)|\), doing similar argument for deriving (3.24), we obtain
Finally, we apply the triangle inequality
to obtain
Summarizing, we have shown the following results.
Theorem 4.2
Assume (3.11). Let \({{\varvec{u}}}\) and \({{\varvec{u}}}^{hk}\) be the solutions of (2.17)–(2.18) and (2.37)–(2.36), respectively. Assume \({{\varvec{u}}}\!\in \! L^{2}(0,T;[H^2(\Omega )]^2), \dot{{{\varvec{u}}}}\!\in \! L^{2} (0,T;[H^2(\Omega )]^2), \ddot{{{\varvec{u}}}}\in L^1(0,T;V)\) and \(\dot{{{\varvec{u}}}}|_{\Gamma _i}\in L^{2}(0,T;[H^2(\Gamma _i)]^2)\) for \(1\le i\le i_0\). Then the error bound (4.12) holds.
5 Numerical example
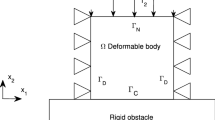
We report numerical results from a two dimensional test example discretized by the DG schemes in space and uniform finite difference scheme in time. We use Matlab to implement the numerical examples. The physical setting is shown in Fig. 1. The domain \(\Omega = (0,1)\times (0,1)\) is the cross section of a linearized elastic body. On the boundary \(\Gamma _D = \{1\}\times (0,1)\), the body is clamped and therefore the displacement field vanishes there. The traction \({{\varvec{f}}}_2\) acts on the boundary \(\{0\}\times (0,1)\) whereas the boundary of \((0,1)\times \{1\}\) is traction free. Thus \(\Gamma _F =\{\{0\}\times (0,1)\} \cup \{(0,1)\times \{1\}\}\). On the boundary \(\Gamma _C = (0,1)\times \{0\}\), the body is in bilateral frictional contact with a rigid obstacle, and the friction is modeled with Tresca’s law. No volume force is assumed to act on the body \(\Omega \).

An elastic body in contact with a frictional rigid obstacle
We consider a homogeneous and isotropic elastic body. Let \(E\) be the Young’s modulus and \(\kappa \) be the Poisson’s ratio of the material. Then the Lamé coefficients are
For computation, we use the following data
Here, the unit \(\mathrm{daN/mm}^2\) denotes decanewtons per square millimeter.
To observe the convergence behavior of the fully discrete scheme, we solve this problem on a family of uniform triangular meshes of the kind shown in Fig. 2. We start with \(h=1/2\) and \(k=1/2\) which are then decreased by half several times. To compute errors of numerical solutions, we adopt the numerical solution corresponding to \(h=1/128\) and \(k=1/128\) as “true” solution. The convergence behavior of the four DG schemes in the norm \(|||\cdot |||\) is shown in Figs. 3, 4, 5, 6, respectively. To show the effect of the size of the penalty parameter \(\eta \) on the convergence, we let \(\eta _e=\eta \) be the same on every edge. In Figs. 3 and 4, the linear asymptotic convergence behavior is clearly observed for the method of Bassi et al. and that of Brezzi et al. with every penalty constant choice \(\eta _e=1{,}10{,}100\ \mathrm{and}\ 1{,}000\), matching well the theoretical prediction (4.12). For \(h\) not too large, the difference of numerical errors is invisible for the choices \(\eta _e = 100\) and \(\eta _e = 1{,}000\). The solid line for the variation of the meshsize \(h\) is included for convenience in concluding linear convergence of the numerical solutions. It is seen from Fig. 5 that the LDG method does not work well with \(\eta _e = 1, 10\) for the test problem. From Lemma 3.4, we know that a drawback of the IP method is that the penalty parameter can not be precisely quantified a priori, which must be chosen suitably large to guarantee stability. However, a large penalty parameter has a negative impact on accuracy. In Fig. 6, we only give the numerical error of the IP method for \(\eta _e = 10{,}000\ \mathrm{and}\ 100{,}000\). We did the numerical test for the case \(\eta _e = 1{,}10{,}100\ \mathrm{and}\ 1{,}000\), but the IP method fails to be convergent.

A uniform triangulation of the domain

Numerical errors of method of Bassi et al. [4] for several discretization parameters of \(h\) and \(k\) when \(t=1s\)

Numerical errors of method of Brezzi et al. [7] for several discretization parameters of \(h\) and \(k\) when \(t=1s\)

Numerical errors of LDG method [11] for several discretization parameters of \(h\) and \(k\) when \(t=1s\)

Numerical errors of IP method [14] for several discretization parameters of \(h\) and \(k\) when \(t=1s\)
To compare the performance of the four DG methods, we pick up the best one error curve from each of Figs. 3, 4, 5, 6, and put them together into Fig. 7. In Fig. 8, we show the deformed mesh (amplified by 200) solved by LDG method with \(\eta _e = 100\) for \(h = 1/32\) when \(t=1s\).

Comparison of the numerical errors for the four DG methods

Deformed mesh (amplified by 200) solved by LDG method for \(h = 1/32\) with \(t=1s\)
References
Arnold, D.N., Brezzi, F., Cockburn, B., Marini, L.D.: Unified analysis of discontinuous Galerkin methods for elliptic problems. SIAM J. Numer. Anal. 39, 1749–1779 (2002)
Arnold, D.N., Brezzi, F., Marini, L.D.: A family of discontinuous Galerkin finite elements for the Reissner-Mindlin plate. J. Sci. Comput. 22, 25–45 (2005)
Atkinson, K., Han, W.: Theoretical Numerical Analysis: A Functional Analysis Framework, 3rd edn. Springer, Berlin (2009)
Bassi, F., Rebay, S., Mariotti, G., Pedinotti, S., Savini, M.: A high-order accurate discontinuous finite element method for inviscid and viscous turbomachinery flows. In: Decuypere, R., Dibelius, G. (eds.) Proceedings of 2nd European Conference on Turbomachinery, Fluid Dynamics and Thermodynamics, pp. 99–108. Technologisch Instituut, Antwerpen, Belgium (1997)
Brenner, S.C.: Korn’s inequalities for piecewise \(H^1\) vector fields. Math. Comput. 73, 1067–1087 (2004)
Brenner, S.C., Scott, L.R.: The Mathematical Theory of Finite Element Methods, 3rd edn. Springer, Berlin (2008)
Brezzi, F., Manzini, G., Marini, D., Pietra, P., Russo, A.: Discontinuous finite elements for diffusion problems. In: Atti Convegno in onore di F. Brioschi (Milan, 1997) Istituto Lombardo. Accademia di Scienze e Lettere, Milan, Italy, pp. 197–217 (1999)
Brezzi, F., Manzini, G., Marini, D., Pietra, P., Russo, A.: Discontinuous Galerkin approximations for elliptic problems. Numer. Methods Partial Differ. Equ. 16, 365–378 (2000)
Ciarlet, P.G.: The Finite Element Method for Elliptic Problems. North Holland, Amsterdam (1978)
Cockburn, B., Karniadakis, G. E., Shu, C.-W. (eds): Discontinuous Galerkin Methods. Theory, Computation and Applications, Lecture Notes in Computer Science engineering, vol. 11. Springer, New York (2000)
Cockburn, B., Shu, C.-W.: The local discontinuous Galerkin method for time-dependent convection-diffusion systems. SIAM J. Numer. Anal. 35, 2440–2463 (1998)
Djoko, J.K., Ebobisse, F., McBride, A.T., Reddy, B.D.: A discontinuous Galerkin formulation for classical and gradient plasticity—part 1: formulation and analysis. Comput. Methods Appl. Mech. Eng. 196, 3881–3897 (2007)
Djoko, J.K., Ebobisse, F., McBride, A.T., Reddy, B.D.: A discontinuous Galerkin formulation for classical and gradient plasticity—part 2: algorithms and numerical analysis. Comput. Methods Appl. Mech. Eng. 197, 1–21 (2007)
Douglas, Jr, J., Dupont, T.: Interior Penalty Procedures for Elliptic and Parabolic Galerkin Methods, Lecture Notes in Physics, vol. 58. Springer, Berlin (1976)
Han, W., Sofonea, M.: Quasistatic Contact Problems in Viscoelasticity and Viscoplasticity. American Mathematical Society and International Press, USA (2002)
Kikuchi, N., Oden, J.T.: Contact Problems in Elasticity: A Study of Variational Inequalities and Finite Element Methods. SIAM, Philadelphia (1988)
Wang, F., Han, W., Cheng, X.: Discontinuous Galerkin methods for solving elliptic variational inequalities. SIAM J. Numer. Anal. 48, 708–733 (2010)
Wang, F., Han, W., Cheng, X.: Discontinuous Galerkin methods for solving Signorini problem. IMA J. Numer. Anal. 31, 1754–1772 (2011)
Wang, F., Han, W., Eichholz, J.: A posteriori error estimates of discontinuous Galerkin methods for obstacle problems (submitted)
Acknowledgments
We thank the two anonymous referees for their valuable comments that lead to an improvement of the paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
F. Wang was supported by the Chinese National Science Foundation (Grant No. 11101168). W. Han was supported by grants from the Simons Foundation. X. Cheng was supported by the Key Project of the Major Research Plan of NSFC (Grant No. 91130004).
Rights and permissions
About this article
Cite this article
Wang, F., Han, W. & Cheng, X. Discontinuous Galerkin methods for solving a quasistatic contact problem. Numer. Math. 126, 771–800 (2014). https://doi.org/10.1007/s00211-013-0574-0
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00211-013-0574-0