
Abstract
The gravity recovery and climate experiment follow-on (GRACE-FO) satellites, launched in May of 2018, are equipped with geodetic quality GPS receivers for precise orbit determination (POD) and gravity recovery. The primary objective of the GRACE-FO mission is to map the time-variable and mean gravity field of the Earth. To achieve this goal, both GRACE-FO satellites are additionally equipped with a K-band ranging (KBR) system, accelerometers and star trackers. Data processing strategies, data weighting approaches and impacts of observation types and rates are investigated in order to determine the most efficient approach for processing GRACE-FO multi-type data for precise orbit determination and gravity recovery. Two GPS observation types, un-differenced (UD) and double-differenced (DD) observations in general can be used for GPS-based POD and gravity recovery. The GRACE-FO KBR observations are mainly used for gravity recovery, but they can be also used for POD to improve the relative orbit accuracy. The main purpose of this paper is to study the impacts of the DD, UD and KBR observations on GRACE-FO POD and gravity recovery. The precise orbit accuracy is assessed using several tests, which include analysis of orbital fits, satellite laser ranging residuals, KBR range residuals and orbit comparisons. The gravity recovery is validated by comparing different gravity solutions through coefficient-wise comparison, degree difference variances and water height variations over the whole Earth and selected area and river basins.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
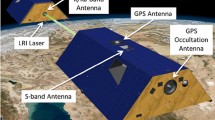
The gravity recovery and climate experiment follow-on (GRACE-FO) mission is a joint project between the National Aeronautics and Space Administration (NASA) and the GeoForschungZentrum (GFZ). The primary objective of the GRACE-FO mission is to map the time-variable and mean gravity field of the Earth (Tapley et al. 2005; Flechtner et al. 2015; Landerer et al. 2019; Kornfeld et al. 2019). The twin GRACE-FO (GRACE-C and GRACE-D) satellites were launched on May 22, 2018, into near polar orbits with an initial altitude of about 500 km. For the precise orbit determination (POD) and gravity field recovery, the GRACE-FO satellites are equipped with several scientific instruments: geodetic quality GPS receivers, accelerometers, star trackers, K-band ranging (KBR) system, laser ranging interferometer (LRI) and laser retroreflectors (Kornfeld et al. 2019). The GPS receiver can track up to 16 GPS satellites. The measurements from the receiver with 1-s data rate are mainly used for POD and low degree gravity recovery. The accelerometer measures the non-gravitational accelerations (such as atmospheric drag and solar radiation pressure) for replacing the imprecise non-gravitational force models in the gravity recovery. The measurements from the star trackers are used for determining satellite attitude, which is needed to rotate the accelerometer data from the spacecraft reference frame to the inertial reference frame. In addition, the attitude data are also needed for the corrections of KBR data, the computation of antenna corrections and SLR residuals. The laser retroreflector provides an independent evaluation of the GRACE-FO POD results. LRI is a technology demonstration in support of future gravity mapping missions. The KBR system provides precise (within 10 µm) measurements of the distance between the two GRACE-FO satellites. The observations from the KBR system are mainly used for gravity recovery, but they can also be used for GRACE-FO POD to improve the relative orbit accuracy.
For efficient and precise orbit determination of low earth orbit (LEO) satellites using GPS data, many authors have investigated the related problems (Bertiger et al. 1994, 2002, 2010; Kang et al. 1995, 2002, 2006; Zhu et al. 2004; Boomkamp and Koenig 2005; Švehla and Rothacher 2005; Jaeggi et al. 2007; Mao et al. 2019). They use different orbit determination methods (kinematic, dynamic and reduced dynamic orbit determination), different observation types (un-differenced and differenced measurements) and different data processing strategies (arc length, data sampling, estimated parameters, data weighting). The accuracy of the orbits has been constantly increased due to improvements in dynamical force and observation models, IGS GPS satellite orbit and clock products, antenna code/phase pattern modeling, single-receiver ambiguity resolution, measurement accuracies and data processing strategies. The radial orbit accuracy validated by SLR residuals has improved from about 3 to 1 cm. Currently, the sub-cm radial accuracy is realized for altimetry satellites with an altitude of 1336 km (Bertiger et al. 2010) and is being realized for LEO satellites at different altitudes. For GPS-based POD, the observation types are mostly either un-differenced (UD) or double-differenced (DD). This paper investigates the differences between GPS UD and DD observations for GPS-based POD under the same standard models and same data processing strategies.
GRACE-FO provides KBR dual one-way range change between the twin GRACE-FO satellites. The KBR range rate and range acceleration can be derived from the original KBR range change. Based on our GRACE data processing experiences, the KBR range rate data are used for gravity recovery; the KBR range data are used for validating the relative orbit accuracy. How do the range rate data contribute to the GRACE-FO POD? To answer this question, we study the POD using both GPS UD and KBR range rate data.
For GRACE-FO gravity recovery, both GPS and KBR data are used. Different types of data have different contributions to estimated parameters. When different data are processed, data rate and weighting must be carefully considered to get optimal solutions for required parameters (such as gravity field coefficients). For GRACE-FO, GPS data mainly contribute to low degree spherical harmonic coefficients of Earth’s gravity field and orbit dynamical parameters, while KBR data have more gravity field information in low, middle and high degrees. Therefore, GPS data should be down-weighted or processed with a low data rate, when KBR and GPS data are used together for gravity field solutions. In this paper, we study the impacts of GPS DD and UD for GRACE-FO gravity field recovery.
Gravity recovery using satellite tracking data needs precise orbits. Conversely, the orbit accuracy is increased by an improved gravity model. This paper describes the methods and data processing strategies for GRACE-FO POD and gravity recovery. The study was performed using the Center of Space Research (CSR)/University of Texas at Austin Multi-Satellite Orbit Determination Program (MSODP) for POD (Rim 1992) and the Advanced Equation Solver for Parallel systems (AESOP) for gravity recovery (Gunter 2004). The data used are GRACE-FO level 1B products produced by NASA JPL. In this study, we precisely determine the GRACE-FO orbits and gravity fields using GPS DD, UD and KBR range rate data. The orbit accuracy and gravity recovery are evaluated through several tests and comparisons.
The GRACE-FO gravity mission has not only a high-low satellite-to-satellite (SST) tracking from GPS but also a low–low SST between two GRACE-FO satellites with the highest precision KBR. After the introduction, our dynamical orbit determination method and data processing strategies are explained in Sect. 2. The dynamic gravity field recovery and data processing strategies are described in Sect. 3. Section 4 focuses on the observation weighting approaches for processing different types of observations. In Sect. 5, the GRACE-FO precise orbits are assessed through several tests. After that, the GRACE-FO gravity fields are evaluated in Sect. 6. Finally, the conclusions from this study are discussed in Sect. 7.
2 Dynamic orbit determination method and data processing strategies
This section briefly describes the GPS-based dynamic orbit determination method and GPS data processing strategies which we used for this study. Details of the method and strategies are given by Kang et al. (2006). The dynamic orbit determination method requires mathematical models of the physical forces acting on the satellites (e.g., accelerations due to Earth’s gravity) and observations to, from or between the satellites to estimate satellite orbits. The dynamic method has been used, but with an aggressive force model parameterization (such as the estimation of many empirical parameters in precise orbit determination). Using this method, force model parameters, such as the atmospheric drag coefficient and one-cycle-per-revolution (1-cpr) empirical acceleration parameters, are co-estimated in order to obtain more precise orbits. The 1-cpr empirical accelerations are particularly effective in accommodating dynamical modeling deficiencies to improve the orbit accuracy. The orbit accuracy is partly dependent on the force models in the dynamic orbit determination. Therefore, it is better to use the best possible force models even though the empirical accelerations can reduce the effects of the model errors. In addition, the orbits can be predicted well by using better force models.
The first data type for the GPS-based orbit determination is the GPS DD carrier phase, which is formed by using GRACE-FO onboard GPS data and ground station GPS data from a subset of IGS ground stations (Fig. 1). These sites were selected based on the IGS-reported station performance and their uniformly geographical distribution. The final JPL IGS orbits and clocks of the GPS satellites are used in our GPS data processing (Kouba 2009). The orbit accuracy using GPS DD observations is dependent not only on the fixed GPS satellite orbits, but also on the ground station coordinate accuracy because the station coordinates are fixed in the GPS-based orbit determination as a reference system. For GRACE-FO POD, a network of 60 stations (Fig. 1) are used.

GPS ground station locations for GRACE-FO GPS DD data processing
The second data type is the GPS UD code and phase measurements from the onboard LEO GPS receiver. The UD code observations are mandatory in GPS-based LEO orbit determination using UD GPS data due to a linear dependency relating the LEO onboard receiver clock and the ambiguity parameters. The ground GPS data are not needed for the orbit determination method that uses UD data. But both the GPS orbits and clocks are used for the orbit determination. The orbit accuracy using GPS UD observations is dependent on both GPS satellite orbits and clocks. Here, the GPS satellite orbits are treated as the LEO orbit reference system.
The third data type is the GRACE-FO KBR range rate, which is numerically derived from the GRACE-FO intersatellite microwave phase tracking. We use the KBR range rate data for POD tests to investigate the effects of KBR data on GRACE-FO POD. The KBR biased range data are used to evaluate the relative orbit accuracy. The GRACE-FO orbits cannot be well determined using only KBR range rate data. Therefore, both KBR range rate and GPS data are used for GRACE-FO POD to study the effects of the KBR data on orbit quality. The GPS and KBR data are treated as equal contributions to the GRACE-FO orbit determination. Therefore, the optimal weighting procedure described in Sect. 4 is applied for GPS and KBR data in the POD.
There are many issues to be considered for the POD data processing. Two of the important issues are arc length and parameterization. The selection of the arc length depends on the force and observation model errors. In general, the effects of the force model error (geopotential, drag, solar pressure, etc.) on the orbit increase with the arc length. On the other hand, the effects of the observation model error (measurement noise, GPS satellite orbits and clock errors, etc.) can be reduced or smoothed by increasing the arc length. Based on our experiences from processing TOPEX, CHAMP and GRACE GPS data (Rim 1992; Kang et al. 2006), 24-h arc lengths were selected.
For the force and observation model parameterization, the first question is what type of parameters should be selected for estimation. Next, the sub-arc length and a priori values for estimated parameters must be chosen. For our POD, the estimated parameters are listed in Table 1. This heavy parameterization produces a very precise orbit and good orbital fits to the GPS tracking data. The piecewise constant parameters with a small arc length for processing KBR data are selected for reducing the effects of high-frequency dynamic model errors, to which the high rate (5 s) KBR data are sensitive. Outputs from the POD process are the satellite ephemerides and the residuals of the GPS DD phase, UD code, UD phase and KBR range rate observations. These outputs are studied to further understand the quality of the force and observation models and observation data. In addition, SLR and KBR range residuals computed relative to the estimated orbits provide an independent assessment of the orbit accuracy. Table 1 summarizes the POD standards adopted for the GRACE-FO data processing.
3 Dynamic gravity field recovery and data processing strategies
In this section, we briefly describe the gravity field recovery method used for this study. Details are given in the listed references. The dynamic gravity field recovery is based on the dynamic orbit determination, which we used for our POD. The dynamic method is the so-called variational method (Reigber 1989; Yuan 1991; Tapley et al. 2005; Bettadpur and McCullough 2017), which uses a conventional least squares adjustment. In the dynamic orbit determination, a set of parameters are estimated to minimize the weighted sum of the squares of the difference between the computed and observed observations. The gravity field model is needed to compute the observations. When the spherical harmonic coefficients of the gravity field are treated as unknown parameters in the dynamic orbit determination, the gravity field is recovered. For GRACE-FO, a month of data are processed to produce a monthly gravity field (Tapley et al. 2005). The data are divided into arcs. Each arc is usually 1 day long. A separate set of satellite initial conditions and other parameters are estimated for each arc.
Three of the important issues for the gravity recovery are: data type, rate and weighting. The data types GPS DD, GPS UD and KBR range rate have been described in Section two. For GPS DD, data rate is down-sampled from 30-s to 2-min, and the ground stations are reduced from 60 to 16 (Fig. 1) to reduce the impact of GPS DD data on gravity solutions. For GPS UD, different data rates and weighting are studied. The KBR range rate data with 5-s sample rate and optimal weighting for each processing arc (1-day) are used for gravity recovery. The observation weighting is discussed in the next section.
The GRACE-FO gravity recovery is performed in several steps. The edited GPS and KBR observations are created in the first step during GRACE-FO POD to edit out observation outliers. Then, the reference orbits are generated by using edited GPS data and accelerometer measurements, which replace the non-gravitational force models. The used accelerometer data are the calibrated GRACE-FO accelerometer data products generated by JPL (McCullough et al. 2019). No outlier detection for these data is applied. The estimated accelerometer parameters are selected based on our gravity solution tests. The KBR data are not used in this step since the GPS-based orbits, generally accurate to the level of few cm, are sufficient to support the required accuracy of the partial derivatives in the next step. In addition, the Earth’s gravity field model parameters are not adjusted in the reference orbit determination. Next, the partial derivatives for all the estimated parameters for each arc and each observation type are computed. In the last step, a set of gravity field parameters with other parameters are estimated from a combination of monthly information equations, which are formed by each partial derivative. The force models (except non-gravitational accelerations), reference frame and tracking data used in the gravity recovery are same as that in POD (Table 1). A detailed description of the background models is contained in Save (2019). Estimated parameters in the gravity field recovery are listed in Table 2.
4 Observation weighting approaches
Estimation of satellite orbits and gravity fields are based on processing discrete observations. In theory, the estimates can be obtained if the observation error covariance is known. In practice, the true error covariance is unknown and an empirical (usually diagonal) error covariance is used for the estimation (Tapley et al. 2004). If only one type of observations is processed, the same error level is usually assigned for all observations. The different error levels affect only the solution covariance, not the solution itself. However, the different error covariances affect the solution, when a priori covariances are known for estimated parameters (such as empirical accelerations). Therefore, the empirical error covariance should be adjusted based on the post-observation residuals. When different types of observations are used for estimation, the incorrect observation sigma affects not only the solution covariance, but also the solution itself. To obtain a better solution for satellite orbits and gravity fields, a proper approach for observation weighting is very important. This section discuses three methods of observation weighting.
4.1 Optimal weighting
When different types of observations are processed and treated as equal contributions to solutions, optimal weighting should be used. The empirical observation error covariance can be scaled based on the observation residual analysis during data processing for multi-type observations. The weight of each observation type is adjusted using an optimal weighting procedure (Yuan 1991).
Let a set of \( Y_{i} \) for observation type i with mi observations be given. Those observations are assumed to be equal to vector function F of a set of u parameters X plus random noise \( \varepsilon_{i} \) as follows:
where q is the number of the observation types. The above equation is called a nonlinear observation equation. The estimation problem is to estimate X given \( Y_{i} \), the function form of F, and the statistical properties of \( \varepsilon_{i} \).
In order to solve this nonlinear problem, Eq. (1) must be linearized. The linearized observation equation is given as follows:
where \( y_{i} = Y - F\left( {X_{0} } \right) \), \( A_{i} = \left( {\frac{\partial F}{\partial X}} \right) \), \( x = X - X_{0} \) and \( X_{0} \) is an initial value. The a priori weighting matrix is diagonal for observation type i:
where \( S_{i}^{2} \) is a priori variance of the observation type i. The estimated values of parameters x can be obtained under the weighted lest square solution as follows:
The optimal weighting factor for the observation type i after one iteration solution is defined by:
where \( m_{i} \) is the number of observations for type i. The new weighting matrix for the next iteration is defined by:
For our GRACE-FO POD and some gravity recovery tests, we use the optimal weighting approach for multi-type observations. Usually, optimal weighting needs multiple iterations to converge the solutions.
4.2 Fixed weighting
Using fixed weighting, the observation weight is fixed during data processing. Different types of observations have different contributions to the parameter estimates. Therefore, fixed weighting affects both the post-fit observation residuals and the solution itself. If you want an observation type to have a larger contribution to the solution, you can use a higher weight for that observation type. Selecting the fixed weighting is based on experience and testing. The equation for fixed weighting matrix is the same as Eq. 3.
When the observation error characteristics are stable over time, the fixed weighting can be used. In addition, we can also use a larger fixed weighting to get smaller residuals for editing observations. For example, we select 2 cm sigma for GPS DD and 0.1 µm/s sigma for KBR range rate for editing KBR data. Because the orbital fits for GPS UD data are stable, 50 cm sigma of GPS UD code and 5 mm sigma of GPS UD phase are selected for GPS UD POD for quick convergence without degrading orbit accuracy.
4.3 Maximum weighting
If we wish to limit the contributions of some observation types to the solution, one can apply a maximum weighting, which is the same as minimum sigma (\( \sigma_{\hbox{min} } \)) for the observations. When the computed post-fit RMS \( (\sigma_{\text{RMS}} ) \) of observations is smaller than that of the minimum sigma, the weighting is computed using the minimum sigma; when the RMS is larger than the minimum sigma, the weighting is computed using the actual RMS. The maximum weighting matrix is diagonal for observation type i:
The GRACE-FO GPS and KBR data have different contributions for gravity recovery. GPS data mainly contribute to low degree spherical harmonic coefficients of Earth’s gravity field and orbit dynamical parameters, while KBR data have more gravity field information in low, middle and high degrees. We use this down-weighting approach for GPS data to get an optimal gravity solution for low, middle and high degrees.
5 GRACE-FO precise orbit quality evaluation
The GRACE-FO precise dynamic orbit determination was carried out based on the method, models and strategies described above (Sect. 2). The data used were 5 months (January to May 2019) of daily arc GRACE-FO Data. For the GRACE-FO POD, four different cases were tested to evaluate the impacts of the data types and data rates on the GRACE orbit accuracy under the same models and data standards:
-
(1)
GPS DD GPS DD phase observations with 30-s data rate.
-
(2)
GPS UD 5M GPS UD code and phase observations with 5-min data rate.
-
(3)
GPS UD 30S GPS UD code and phase observations with 30-s data rate.
-
(4)
GPS UD + KBR GPS UD code and phase observations with 5-min data rate and KBR range rate with 5-s data rate.
The tasks of POD are to produce the orbits and to evaluate their accuracy. The orbit accuracy was assessed through several tests, which include analysis of the orbital fits, calculation of the GRACE SLR and KBR residuals and orbit comparisons. The following subsections summarize the POD results and the orbit accuracy.
5.1 Orbital fits
The orbital fits to the satellite tracking data (observation residuals) permit the evaluation of the quality of force and observation models used in the dynamic orbit determination. If the forces and observations were perfectly modeled, the orbital fits would be at the level of the data precision. Four different data types, GPS DD phase, GPS UD code, GPS UD phase and KBR range rate were used for POD. Therefore, four different RMS’s for GRACE-C and GRACE-D are listed and discussed. Different GPS receivers have different observation noises. Generally, the P-code data precision is about 0.1–0.5 meters; the phase precision is about 2–5 mm.
Figures 2 and 3 show the daily GPS DD phase, UD phase, and KBR range rate RMS as well as GPS UD code RMS for GRACE-C, respectively. Table 3 summarizes the mean GPS and KBR range rate orbital fit RMS for the whole processed data span. According to these results, there are significant differences between the different data types: GPS DD phase (about 8 mm), GPS UD phase (about 4.0 mm), GPS UD code (about 350 mm), and KBR range rate (0.15 µm/s). The large RMS difference between the phase and code is mainly because the phase measurements are much more precise than the code measurements. The smaller RMS for UD phases compared to the DD phases is due to the observation type. The DD observations are formed by differencing four single GPS UD observations, and the DD data precision is twice as high as that of the UD observations. There are significant differences for GPS UD with 5-min and 30-s data rates. The orbital fits for 5-min data rate are better than those with 30-s data rate.

Daily RMS of GRACE-C orbital fits for GPS DD, GPS UD phase and KBR range rate (The data gap from February 7 to 21, 2019, was due to an automatic shutdown of the OBS (On-Board Computer) for GRACE-D)

Daily RMS of GRACE-C GPS UD Code orbital fits for different test cases
Generally, there are no gaps for either GPS or KBR data. Data gaps exist only during resetting and testing GRACE-FO onboard instruments. There are no significant differences in performance compared to the GRACE GPS receivers. However, the orbital fit RMS (0.15 µm/s) of the KBR range rate for GRACE-FO is smaller than the RMS (0.22 µm/s) for GRACE. The orbital fits reflect the quality of the dynamical and measurement models as well data precision. The error sources could be GPS orbit and clock errors, mis- and/or un-modeled Earth gravity, tide and non-gravitational forces, imperfect estimation of the parameters, antenna offset errors, etc. The orbit accuracy can be better with improvements in such areas in the future.
We assume that there are no correlations between the observations. Thus, the covariance matrix of the observations is diagonal. Therefore, the weighting matrix is also diagonal. The data weights are inversely proportional to the variance of observations. Figure 4 shows the GRACE-FO data weights for GPS UD and KBR range rate. The weight changes with the days are from 0.063 to 0.109 (1/dm2) for GPS UD code data, 0.060–0.085 (1/mm2) for GPS UD phase data and 38–50 (s2/µm2) for KBR range rate data. Table 4 summarizes the mean data weights for different units. You can see that the weights in SI (International System of Units) units are very different due to different observation accuracies.

GRACE-FO data weights for GPS UD and KBR range rate (The data gap from Feb. 7 to 21, 2019 was due to an automatic shutdown of the OBS for GRACE-D)
5.2 SLR residuals
As an independent and external evaluation of the orbit quality, SLR data were processed to compute laser range residuals relative to the fixed GRACE-FO orbits. The SLR residual RMS samples the orbit errors in all orbit components, and they can be used to validate LEO orbit accuracy in an absolute sense. As the test of the orbit accuracy, the SLR measurements were used with a 10-degree elevation cutoff.
There were about 20, 000 SLR observations from 23 SLR ground stations for each GRACE-FO satellite (about 130 data points per day). No station coordinates or range biases were estimated for the SLR residuals. The outlier detection threshold of the SLR analysis was that both three-sigma editing and an allowed maximum (20 cm) were used. The SLR retroreflector correction patterns are not used. Figure 5 shows the daily GRACE-C SLR residual RMS for different test cases. You can see that there are no significant differences for different test cases. Table 5 summarizes the mean SLR residual RMS for both GRACE-C and GRACE-D using GPS DD, UD and UD + KBR observations. The RMS of the residuals for the GPS DD and UD data types has no significant differences for both GRACE-C and GRACE-D. This means that there are no big effects of the data types and data rates on the absolute orbit accuracy. But the RMS for the high rate UD (30S) and UD (5M) + KBR are a little better than for the UD (5M). The SLR residuals for both GRACE-C and GRACE-D have a mean bias of about 4 mm; the SLR residual RMS are about 15 mm, which indicates the level of the GRACE-FO orbit accuracy.

Daily RMS of GRACE-C SLR residuals for different test cases
5.3 KBR residuals
The key scientific instrument onboard the GRACE-FO satellites is the KBR system, which measures the dual one-way range change between the twin GRACE-FO satellites. The KBR data are used mainly for gravity field recovery. However, the KBR range residuals computed by fixing the GRACE POD orbits can be used for evaluating the relative orbit accuracy of the GRACE-FO satellites.
The GRACE-FO KBR ranges were computed from GRACE POD and compared to the KBR measurements. The RMS of the differences was computed on each continuous KBR arc on each day after removing a KBR range bias. Figure 6 displays the daily RMS of the KBR range residuals for different test cases. You can see that there are significant differences between the DD, UD and UD + KBR test cases. Table 6 summarizes the average daily RMS of the KBR range residuals. The results show the relative orbit accuracy using high rate GPS UD (30S) data is much better than that using GPS DD and low rate UD (5M) data. It is important to note that the RMS of the KBR range residuals is only 0.2 mm when the KBR range rate data are used for GRACE-FO POD. This means that the KBR data can significantly improve the orbit accuracy in the along-track component.

Daily RMS of GRACE-FO KBR range residuals for different test cases (The data gap from Feb. 7 to 21, 2019 was due to an automatic shutdown of the OBS for GRACE-D)
5.4 Orbit comparison
The GRACE-FO orbits were directly compared with each other for different test cases. The orbit differences show the impacts of observation data types on orbit accuracy. They also indicate the effects of data rates (GPS UD 5M vs. GPS UD 30S). For the orbit comparison, there were no bias removals or similar transformations. Figure 7 shows the daily orbit difference RMS for GRACE-C in the radial, along-track (transverse), cross-track (normal) direction and 3D positions for GPS DD and UD (30S) data. You can see that the orbit differences in radial and cross-track directions are smaller than those in along-track direction. Tables 7 and 8 summarize the orbit difference statistics for both GRACE-C and GRACE-D, respectively. The average RMS values for GRACE-C and GRACE-D in radial and cross-track directions are less than 1 cm; in along-track direction less than 1.5 cm.

Daily RMS of GRACE-C orbit comparison between GPS DD and GPS UD 30S
Both the SLR residuals and the orbit comparison can be used to evaluate the absolute orbit accuracy. The results (Table 5, 7, 8) indicate a very good agreement for the orbit accuracy in position. Conservatively speaking, the GRACE-FO orbit accuracy is better than 2 cm; the orbit accuracy in radial and cross-track directions is better than 1 cm.
6 Evaluation of GRACE-FO gravity field recovery
The monthly GRACE-FO gravity recovery was carried out based on the method, models and data processing strategies described above (Sect. 3). The data used for this study were five months (January to May 2019). To investigate the impacts of GPS data types, rates and weighting on gravity recovery, four different cases were tested as follows:
-
(1)
GPS DD DW 2M down-weighted GPS DD phase observations with 2-min data rate.
-
(2)
GPS UD OW 5M optimally weighted GPS UD code and phase observations with 5-min data rate.
-
(3)
GPS UD OW 30S optimally weighted GPS UD code and phase observations with 30-s data rate.
-
(4)
GPS UD DW 30S down-weighted GPS UD code and phase observations with 30-s data.
For the gravity solution, both KBR and GPS data are needed. Each data type contributes information to the solution. In addition, the gravity recovery is dependent on the data distribution of satellite ground track (Kang 1998). Using optimal weights for both KBR and GPS (DD 2-min or UD 30-s) data results in a degraded gravity solution.
Through past heuristic experimentation, we have found a lower weight or a lower data rate for GPS data that give us the “best” balance between the information and noise contributed by GPS data. For GPS DD 2-min data, the data RMS was down-weighted from about 0.8 cm to 2.12 cm; the RMS of GPS UD 30-s phase data from about 5 mm to 5 cm; the RMS of GPS UD 30-s code data from about 50 cm to 5 m. For GPS UD 5-min data, the current study found that these data can be optimally weighted. Based on those tests, the following empirical formula (data rate sigma balance) is given:
where \( r_{5} \) is 5-min data rate; \( \sigma_{5} \) is sigma of data for 5-min data rate; \( r_{n} \) is new data rate (such as 30 s or 2 min); and \( \sigma_{n} \) is designed sigma of data for the new data rate. For example, the designed sigma for 2-min GPS DD data and down-weighting is 2 cm (300 × 0.8 = 120 × \( \sigma_{n} \)); the sigma for 30-s GPS UD data is 5 cm (300 × 0.5 = 30 × \( \sigma_{n} \)). The computed values are very close to what were used. Therefore, we can use the empirical formula to compute the down-weighting sigma for GRACE-FO gravity recovery. The KBR range rate data with 5-s sample rate and optimal weighting for each processing arc (1-day) were used for gravity recovery.
Figure 8 shows the GRACE-FO optimal weighting RMS for GPS UD 5M and KBR range rate data after gravity solution. The weighting RMS for GPS UD phase is relatively stable. Table 9 lists the down-weighting RMS and optimal weighting mean RMS. You can see that the RMS differences between POD and gravity recovery for GPS UD 5M data are almost the same. However, there are significant RMS differences (0.15 vs. 0.08 µm/s) between POD and gravity recovery for KBR range rate. This is due to the reducing the effects of high-frequency dynamic model errors on the KBR range rate residuals through solving for gravity field coefficients.

GRACE-FO optimal weighting RMS for GPS UD 5M and KBR range rate data after gravity solution (The data gap from Feb. 7 to 21, 2019 was due to an automatic shutdown of the OBS for GRACE-D)
The 5 monthly gravity model coefficients were estimated to degree/order 60 with no constraints or regularization. We use the degree/order 60 gravity solutions for our study, because they are stable and reliable, and just the relative differences for different solutions are discussed. January 2019 was taken as an illustrative month. The remaining months are somewhat similar. Figure 9 shows the square roots of degree difference variances between different test gravity fields and the static field GGM05C. All statistics are shown in units of mm of geoid height and are derived from simply multiplying the degree-accumulated statistics of the coefficients by the equatorial Earth radius of 6378.136 km. Usually, the square roots represent the time-variable signals in lower degrees, and they indicate the noises in higher degrees. It can be seen there are almost no differences below degree 30. But there are clear differences for different tests cases above degree 30. The gravity solution for the test case GPS UD OW 30S has more noise than the other test cases. This is due to the GPS data with higher data rate and no down-weighting. For the remaining test cases, there are no significant differences. This means that we can get similar results using either GPS DD or GPS UD data for GRACE-FO gravity recovery by applying for proper data rate and weighting.

Square roots of degree difference variances between different test gravity fields and GGM5C in terms of geoid heights (January 2019)
Figure 10 shows the square roots of degree difference variances between different GPS UD gravity fields and GPS DD gravity field in terms of geoid heights, the formal error for the GPS DD gravity solution and degree error for GGM05C. You can see that the difference only for test case GPS UD OW 30S in higher degrees is above the formal error. The formal error in low degrees is overly optimistic (Meyer et al. 2016). Therefore, the calibrated degree error of GGM05C (Ries et al. 2016) can be used for checking the gravity solutions in low degrees. The differences for all test cases in low degrees are below the GGM05C degree error. In summary, all test cases except GPS UD OW 30S have the same level of results.

Square roots of degree difference variances between different GPS UD gravity fields and GPS DD gravity field in terms of geoid heights, formal error for GPS UD gravity solution and degree error for GGM05C
Figure 11 shows spherical harmonic coefficient differences between test cases GPS UD OW 5M (left), GPS UD OW 30S (middle), GPS UD DW 30S (right) and GPS DD DW 2M. The coefficient-wise differences provide useful information about difference locations. There are mainly three different sections: low degree/order, high degree/order and the central part of the triangles of coefficients. The central part containing the low- medium- and high-degree/order coefficients generally has smaller differences. The low- and high-degree/order part has larger differences. In addition, some sectoral harmonics and the coefficients at resonance orders (15, 31, and 46) have also relatively large differences. However, the test case GPS UD OW 30S again shows more coefficient differences.

Spherical harmonic coefficient differences between test cases GPS UD OW 5M (left), GPS UD OW 30S (middle), GPS UD DW 30S (right) and GPS DD DW 2M for month January 2019
Figure 12 shows water height differences between monthly gravity solution test cases GPS UD OW 5M (top left), GPS UD OW 30S (bottom left), GPS UD DW 30S (top right), GGM5C (bottom right) and GPS DD DW 2M (smoothing radius 350 km). The differences between GPS DD and GGM05C show the gravity changes (signal). The differences between different GPS UD and GPS DD are mainly small stripes, which indicate the impacts of GPS data. This means that there is no significant signal loss using either GPS DD or GPS UD data. But there are relatively large stripes for GPS UD OW 30S test case. Using proper data rate and/or weighting can reduce the stripes and noise for recovered gravity fields. Table 10 summarizes the statistics of the gravity field differences. The equivalent water height error is about 1–2 cm.

Water height differences between monthly gravity solution test cases GPS UD OW 5M (top left), GPS UD OW 30S (bottom left), GPS UD DW 30S (top right), GGM5C (bottom right) and GPS DD DW 2M (smoothing radius 350 km)
Figure 13 shows the comparisons of some estimated spherical harmonic time series coefficients for different test cases. The coefficient-wise comparison with time shows how the coefficients for different month are different. Generally, they are small and acceptable based on the current accuracy. In this figure, the C20 (top left) derived from satellite laser range (SLR) is also plotted for comparison. The GRACE-FO-derived C20 estimates are unreliable, and they are replaced by SLR-derived values (Chambers and Bonin 2012). You can see that the C20 estimates from the case GPS UD OW 30S (green) are closer to the SLR solutions. This means that the C20 estimates are improved using more GPS data without down-weighting. But the estimates in high degrees/orders are noisier. This is because the coefficients compared with other test cases are more different (Fig. 13 bottom left and right).

Samples of estimated spherical harmonic coefficients for different test cases
To study the impacts of GPS data for GRACE-FO gravity recovery, the equivalent water height within selected areas and river basins are computed (using a smoothing radius of 350 km). Figure 14 shows the water height variations for the Huanghe, Greenland, Amazon and Texas areas (bottom) for different test cases. Generally, there are no significant differences in current accuracy limitation (about 1–2 cm water height). However, the test case GPS UD OW 30S (green) shows more variation than the other test cases.

Equivalent water height variations for Huanghe (top left), Greenland (top right), Amazon (bottom left) and Texas (bottom right) for different test cases
7 Conclusions
The GRACE-FO orbits were efficiently and precisely determined not only using GPS DD, GPS UD but also KBR range rate observations by fixing GPS satellite orbits and clock parameters. The dynamic orbit determination method has been used, but with an aggressive force model parameterization. Both relative and absolute accuracy of the GRACE orbits is comparable by using either GPS DD observations or GPS UD observations. However, based on the orbit accuracy evaluation, the results using GPS UD 30-s observations are a little better than those using GPS DD 30-s and GPS UD 5-min data. The disadvantage of the DD approach is the processing of a large amount of observations from the GPS ground stations, but it has a better coordinate reference system, and it does not need GPS clock parameters. The GPS UD approach has the opposite advantages and disadvantages. Adding KBR range rate data for GRACE-FO POD, the relative orbit accuracy is significantly improved without losing the absolute orbit accuracy.
Based on the SLR residuals and orbit comparison, the absolute accuracy of sub-centimeters in radial and normal direction as well as better than 2 cm in the 3D position has been achieved for GRACE-FO orbits. The relative orbit accuracy obtained using GPS UD data is better than that using GPS DD data. According to the KBR range residuals, the relative accuracy between the two GRACE satellites is about 9 mm using GPS DD; 6 mm using GPS UD; 0.2 mm using GPS UD and KBR.
The GRACE-FO gravity recovery was carried out using GPS DD or GPS UD data plus KBR range rate to study the impacts of GPS data on gravity solutions, which are validated through coefficient comparison, degree difference variances and water height variations over the whole Earth and selected area and river basins. When more than two types of data are processed, selection of data rate and weighting is very important. Different data have different contributions to the estimated parameters. For GRACE-FO, GPS data mainly contribute to low degree spherical harmonic coefficients of Earth’s gravity field and orbit dynamical parameters, while KBR data have more gravity field information in low, middle and high degrees. When high rate GPS data without down-weighting are used, the solution degradation is clear. In summary, there are no significant impacts of GPS DD and UD data on the GRACE-FO gravity recovery, when proper data rate and weighting for GPS data are used.
Data availability
The synthetic datasets generated and analyzed during the study are available on request from the corresponding author. The GNSS datasets used for this study are available at https://cddis.nasa.gov/archive. The GRACE-FO data can be found at https://podaac.jpl.nasa.gov/dataset/GRACE_L1B_GRAV_JPL_RL02.
References
Altamimi Z, Rebischung P, Métivier L, Collilieux X (2016) ITRF2014: a new release of the international reference frame modeling nonlinear station motions. J. Geophys Res. https://doi.org/10.1002/2016JB013098
Barlier F, Berger C, Falin J, Kockarts G, Thuillier G (1978) Atmospheric model based on satellite drag data. Ann Geophys 34:9–24
Bertiger W, Bar-Server Y, Christensen E, Davis J, Haines B, Ibanez-meier R, Jee J, Lichten S, Melbourne W, Muellerschon R, Munson T, Vihue Y, Wu S, Yunck T, Schutz B, Abusali P, Rim H, Watwins W, Wills P (1994) GPS precise tracking of TOPEX/Poseidon: results and implications. J Geophys Res Oceans TOPEX/Poseidon Special Issue 99C12: 24449-24464
Bertiger W, Bar-Sever Y, Bettadpur B, Desai S, Dunn C, Haines B, Kruizinga G, Kuna D, Nandi S, Romans L, Watkins M, Wu S (2002) GRACE millimeters and microns in orbit. In: Proceedings of ION GPS 2002, Portland OR, USA
Bertiger W, Desai S, Dorsey A, Haines B, Harvey N, Kuang D, Sibthorpe A, Weiss J (2010) Sub-centimeter precision orbit determination with GPS for ocean altimetry. Mar Geodesy 33(S1):363–378
Bettadpur S (2012) GRACE product specification documents, CSR-GR-03-02, v4.6. Center for Space Research, the University Texas at Austin
Bettadpur S, McCullough C (2017) The classical variational approach. In: Naeimi M, Flury J (eds) Global gravity field modelling from satellite-to-satellite tracking data. Lecture notes in Earth system science. https://doi.org/10.1007/978-3-319-49941-3_3
Boomkamp H, Koenig R (2005) Bigger, better, faster POD. I:, 2004 Berne workshop & symposium. Astronomical Institute, University of Bern
Capitaine N, Gambis D, McCarthy D, Petit G, Ray J, Richter B, Rothacher M, Standish M, Vondrak J (eds.) (2002) IERS Technical Note 29 Proceedings of the IERS workshop on the implementation of the new IAU resolutions 2002. Verlag des Bundesamts für Kartographie und Geodasie, Frankfurt am Main
Chambers D, Bonin J (2012) Evaluation of release-05 GRACE time-variable gravity coefficients over the ocean. Ocean Sci 8(5):859–868
Debslaw H, Bergmann-Wolf I, Dill R, Poroput L, Flechtner F (2017) AOD1B product description document. GRACE 327–750. https://podaac-tools.jpl.nasa.gov/drive/files/allData/gracefo/docs/AOD1B_PDD_RL06_v6.1.pdf
Flechtner F, Morton P, Wattkins M, Webb F (2015) Status of the GRACE following-on mission. In: Proceedings of the international association of geodesy symposia gravity, geoid and height system (2012, Vemice, Italy), IAGS-D-12-00141
Gambis D (2004) Monitoring earth orientation using space-geodetic techniques: state-of-the-art and prospective. J Geod 78:295–303
Gunter B (2004) Computational methods and processing strategies for estimating Earth’s gravity field. Dissertation, Department of Aerospace Engineering and Engineering Mechanics, The University of Texas at Austin
Jaeggi A, Huggentobler U, Bock H, Beutler G (2007) Precise orbit determination for GRACE using undifferenced or double differenced GPS data. Adv Space Res 39:1612–1619
Kang Z (1998) Praezise Bahnbestimmung niedrigfliegender Satelliten mittels GPS und die Nutzung fuer die globale Scwerefeldmodellierung. Thesis, Scientific Technical Report; 98/25
Kang Z, Schwintzer P, Reigber Ch, Zhu SY (1995) Precise orbit determination for TOPEX/POSEIDON using GPS-SST data. Adv Sp Res 16(12):59
Kang Z, Tapley B, Bettadpur S, Rim H, Nagel P (2002) Precise orbit determination for CHAMP using accelerometer data. Adv Astronaut Sci 112:1405–1410
Kang Z, Tapley B, Bettadpur S, Ries J, Nagel P, Pastor R (2006) Precise orbit determination for the GRACE mission using only GPS data. J Geod 80:322–331. https://doi.org/10.1007/s00190-006-0073-5
Knocke P, Ries J, Tapley B (1988) Earth radiation pressure effects on satellites. In Proceedings of the AIAA/AAS astrodynamics coference, Am. Inst. Aeron. Astronaut, Washington, D. C, pp 577–587
Kornfeld R, Arnold B, Gross M, Dahys N, Klipstein W, Gath P, Bettadpur S (2019) GRACE-FO: the gravity recovery and climate experiment follow-on mission. J Spacecr Rockets 56(3):931–951
Kouba J (2009) A guide to using International GNSS Service (IGS) products. https://igscb.jpl.nasa.gov/igscb/resource/pubs/UsingIGSProductsVer21.pdf
Landerer F, Flechtner F, Webb F, Watkins M, Save H, Bettadpur S, Gaston R (2019) GRACE following-on: mission status and first mass change observations. IUGG July 8–18, 2019, Montreal Canada
Mao X, Visser P, Van den IJssel J (2019) Absolute and relative orbit determination for the CHAMP/GRACE constellation. Adv Sp Res 63:3796–3816. https://doi.org/10.1016/j.asr.2019.02.030
Mathews PM, Herring TA, Buffet B (2002) Modeling of nutation-precession: new nutation series for nonrigid Earth, and insights into the Earth’s interior. J Geophys Res. https://doi.org/10.1029/2001jb000390
McCullough C, Harvey N, Save H (2019) Description of calibrated GRACE-FO accelerometer data products. JPL D-103863. https://podaac-tools.jpl.nasa.gov/drive/files/allData/gracefo/docs/GFO.ACT.JPL-D-103863.20190520.pdf
Meyer U, Jaeggi A, Jean Y, Beutler G (2016) AIUB-RL02: an improved time series of monthly gravity fields from GRACE data. Geophys J Int 205:1196–1207
Petit G, Luzum B (2010) IERS conventions 2010. IERS Technical Note No. 36
Ray R (1999) A global ocean tide model from TOPEX/POSEIDON altimetry: GOT99.2, Rep. NASA/TM-1999-209478, 58 pp. Goddard Space Flight Cent., Greenbelt, Md
Reigber C (1989) Theory of satellite geodesy and gravity field determination. Lecture notes in earth sciences, vol 25. Springer, Berlin. https://doi.org/10.1007/BFb0010546
Ries J, Bettadpur S, Eanes R, Kang Z, Ko U, McCullough C, Nagel P, Pie N, Poole S, Richter T, Save H, Tapley B (2016) Development and evaluation of the global gravity model GGM05, CSR-16-02. The University of Texas at Austin
Rim H (1992) TOPEX orbit determination using GPS Tracking system. Ph.D. Dissertation, Department of Aerospace Engineering and Engineering Mechanics, The University of Texas at Austin
Save H (2019), GRACE-FO CSR Level-2 processing standards document, CSR GRFO-19-01
Standish EM (1998) JPL planetary and lunar ephemerides DE405/LE405, JPL IOM 312.F-98-048
Švehla D, Rothacher M (2005) Kinematic positioning of LEO and GPS satellites and IGS stations on the ground. Adv Sp Res 36:376–381
Tapley B, Shutz B, Born G (2004) Statistical orbit determination. Elsevier, Amsterdam
Tapley B, Ries J, Bettapur S, Chambers D, Cheng M, Condi F, Guenter B, Kang Z, Nagel P, Pastor R, Pekker T, Poole S, Wang F (2005) GGM02—an improved Earth gravity field model from GRACE. J Geod 79:467–478
Yuan D (1991) The determination and error assessment of the Earth’s gravity field model, Report CSR-91-01. Center for Space Research, the University of Texas at Austin
Zhu S, Reigber C, Koenig R (2004) Integrated adjustment of CHAMP, GRACE and GPS data. JoG 78(1-2):103–108
Acknowledgements
The authors would like to thank the International Global Navigation Satellite System (GNSS) Service (IGS) for providing the GPS ground station data and GPS satellite orbit products and the International Laser Range Service (ILRS) for the SLR data. High performance computing resources were provided by the Texas Advanced Computing Center (TACC) at the University of Texas at Austin. This research was supported by JPL contract 1604489.
Author information
Authors and Affiliations
Contributions
ZK and SB designed the research. The software modification for this study was performed by ZK with support from PN. ZK made the precise orbit determination and gravity recovery using GPS UD and KBR data; PN made them using GPS DD and KBR data. ZK wrote the manuscript with corrections and comments from SB, PN and SP. All authors were involved in result discussions throughout the development.
Corresponding author
Rights and permissions
About this article

Cite this article
Kang, Z., Bettadpur, S., Nagel, P. et al. GRACE-FO precise orbit determination and gravity recovery. J Geod 94, 85 (2020). https://doi.org/10.1007/s00190-020-01414-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00190-020-01414-3