
Abstract
Significant differences in time series of geodynamic parameters determined with different Global Navigation Satellite Systems (GNSS) exist and are only partially explained. We study whether the different number of orbital planes within a particular GNSS contributes to the observed differences by analyzing time series of geocenter coordinates (GCCs) and pole coordinates estimated from several real and virtual GNSS constellations: GPS, GLONASS, a combined GPS/GLONASS constellation, and two virtual GPS sub-systems, which are obtained by splitting up the original GPS constellation into two groups of three orbital planes each. The computed constellation-specific GCCs and pole coordinates are analyzed for systematic differences, and their spectral behavior and formal errors are inspected. We show that the number of orbital planes barely influences the geocenter estimates. GLONASS’ larger inclination and formal errors of the orbits seem to be the main reason for the initially observed differences. A smaller number of orbital planes may lead, however, to degradations in the estimates of the pole coordinates. A clear signal at three cycles per year is visible in the spectra of the differences between our estimates of the pole coordinates and the corresponding IERS 08 C04 values. Combinations of two 3-plane systems, even with similar ascending nodes, reduce this signal. The understanding of the relation between the satellite constellations and the resulting geodynamic parameters is important, because the GNSS currently under development, such as the European Galileo and the medium Earth orbit constellation of the Chinese BeiDou system, also consist of only three orbital planes.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Since more than two decades, Geocenter Coordinates (GCCs) and Earth Rotation Parameters (ERPs) have been estimated using different space geodetic techniques including Global Navigation Satellite Systems (GNSS). The ERPs are provided among others with a high accuracy by the International GNSS Service (IGS, Beutler et al. 1999; Dow et al. 2009).
The ERPs are part of the transformation between the International Terrestrial Reference Frame (ITRF) and the International Celestial Reference Frame (ICRF) (Bizouard and Gambis 2009). They include the pole coordinates x and y, which describe the coordinates of the Celestial Intermediate Pole (CIP) relative to the reference pole of the International Earth Rotation and Reference Systems Service (IERS, Dick and Thaller 2014). The IGS Analysis Centers (ACs), including the Center for Orbit Determination in Europe (CODE, Dach et al. 2013), model the pole coordinates x and y as linear functions of time within each day and provide the values at noon, on which we will focus in this study. Our pole coordinates are compared to the IERS 08 C04 series (Bizouard and Gambis 2009; Gambis 2004), which is consistent with the ITRF2008 (Altamimi et al. 2011) and based on a combination of different space geodetic techniques.
The GCCs are defined as the offset between the instantaneous center of mass of the Earth and the origin of a terrestrial reference frame, e.g., the ITRF. The geocenter varies due to mass redistributions in the Earth system (Dong et al. 1999). The variations are expected to lie within 1 cm (Dong et al. 1997). Throughout this article, the motion of the geocenter is viewed as a common translation vector of the station network. Effects caused by crustal deformations (Blewitt 1997) are not considered. Wu et al. (2012) give an extensive overview of the geocenter motion and its estimation.
Although GNSS-based ERP and GCC products are of high quality, they are not free of GNSS-specific spurious effects. Ray et al. (2008, 2013) showed, for example, that draconitic errorsFootnote 1 from GPS are visible in the time series of IGS station coordinates. Griffith and Ray (2012) showed that these artefacts are detectable in all IGS products.
Rebischung et al. (2014) performed a collinearity diagnosis suggesting that the geocenter estimates are sensitive to modeling issues related to the simultaneous estimation of clock offsets and tropospheric parameters. The question whether or how the number of orbital planes of a GNSS influences the GCC estimate was not discussed in their study.
Meindl (2011) observed significant differences in the time series of the daily GCCs between GPS-only, GLONASS-only, and combined GPS/GLONASS solutions. These solutions were based on data from 2008–2010 collected by a global network of 92 stations with combined GPS/GLONASS receivers. Arnold et al. (2015) presented the amplitude spectra of time series based on observations from 2009 to 2011 of the same network. The differences in the geocenter z-coordinate between the GLONASS-only estimates and the GPS-only estimates were found to be particularly large. The GLONASS-only estimates reached amplitudes exceeding 10 cm at three cycles per year (3 cpy), which are clearly artificial. For GPS, the amplitudes were below 5 mm.
Meindl et al. (2013) explained these differences by the correlation of the geocenter z-coordinate with Solar Radiation Pressure (SRP) parameters of the Empirical CODE Orbit Model (ECOM, Beutler et al. 1994). The correlation was found to be crucial between the geocenter z-coordinate and the parameter describing the constant acceleration in the satellite-Sun direction caused by the SRP. This correlation increases with an increasing elevation angle \(\beta \) of the Sun above the orbital plane. As the inclination of the orbital planes of GLONASS is larger than for GPS (GLONASS \({64.8}^{\circ }\), GPS \({55}^{\circ }\)), the range of \(\beta \) for GLONASS is larger than for GPS (GLONASS \(\pm {88.3}^{\circ }\), GPS \(\pm {78.5}^{\circ }\)) leading to higher correlations for GLONASS at the maximum and minimum values and thus to large errors in the geocenter z-coordinate.
Meindl (2011) also studied the pole coordinates by forming differences between their estimates and the IERS 08 C04 series. It was shown that the standard deviations of the x- and y-pole differences of GLONASS were about a factor of 2 larger than for GPS. The amplitude spectra of the differences showed that GLONASS had significantly larger amplitudes at 3 cpy than GPS. For the x-coordinate, the amplitude was 20 times larger and for the y-coordinate 8 times larger.
These large spurious signals in the GCC and ERP estimates were reduced by Rodríguez-Solano et al. (2014) by introducing an adjustable box-wing model (Rodríguez-Solano 2013). Arnold et al. (2015) improved the estimates by updating the ECOM to the ECOM2, which contains periodic terms in the parameters referring to the satellite-Sun direction of the SRP model. These new parameters also absorb the effects caused by the elongated satellite bodies of the GLONASS satellites. The introduction of the ECOM2 reduced the excursions in the geocenter z-coordinate substantially. The large amplitudes at 3 cpy seen in the GLONASS estimates were decreased by a factor of about two.
Significant differences remain despite the orbit model improvements. Figure 1 shows the amplitude spectra of the estimated geocenter z-coordinates using ECOM2 for GPS-only, GLONASS-only and the combined GPS/GLONASS solution. The amplitudes in the GLONASS solution, especially at 3 cpy, are still significantly larger than in those in GPS or the combined solutions, and are clearly artefacts.

Amplitude spectra of the geocenter z-coordinate from GPS, GLONASS (GLO) and the combined GPS/GLONASS solution (CMB). Based on the observations collected by the global station network of the IGS in the years 2012–2014 and processed using ECOM2. The vertical lines mark the periods of 1, \({1}/{2}\), \({1}/{3}\),...year
One possible explanation of these remaining differences, as already mentioned in Meindl et al. (2013), is the different number of orbital planes in the GNSS (6 for GPS and 3 for GLONASS).
The main objective of this paper therefore is to study how the number and configuration of orbital planes in a GNSS influence the estimate of the GCCs and pole coordinates. For that purpose, two “virtual” GPS sub-systems are created, each consisting of three orbital planes. GCCs and ERPs are consistently estimated with GPS, GLONASS, the combined GPS/GLONASS solution and the two GPS sub-systems and are then compared.
The relation between the geometry of the satellite constellation and the resulting geodynamic parameters is important, because the GNSS currently under development, such as the European Galileo and the medium Earth orbit (MEO) constellation of the Chinese BeiDou system, consist of only three orbital planes as well. While Galileo has the same number of orbital planes as GLONASS, their inclination is \({56}^{\circ }\), which is very close to the one of GPS.
Section 2 describes in detail the used data and the generation of the solutions. The GCC and ERP estimates are presented in Sects. 3 and 4, respectively. A summary and conclusion of the results is given in Sect. 5.
2 Method
2.1 Data and models
This study was performed with the latest development version of the Bernese GNSS Software (Dach et al. 2015) using the GNSS data and models as used in the most recent reprocessing effort REPRO15 (Sušnik et al. 2016) of the Astronomical Institute of the University of Bern (AIUB) which was performed outside the regular IGS reprocessing campaigns in the frame of the European Gravity Service for Improved Emergency Management (EGSIEM, Jäggi et al. 2015). This includes all observations, which are collected by the global station network of the IGS and that are analyzed routinely by the CODE analysis center of the IGS (>250 stations). The full ECOM2 with nine parameters was used. The 1-day solutions from the years 2012–2014 were analyzed. No earlier observations are included, because GLONASS was not fully deployed before 2012. From 2012, the constellation consists of 24 satellites, with 8 satellites per orbital plane.
2.2 Solutions
In a typical global GNSS-solution, as routinely performed by the IGS ACs, the following parameters are set up and estimated:
-
Receiver Clock Parameters (recCLK)
-
Station Coordinates (CRD)
-
Troposphere Parameters (TRP)
-
Geocenter Coordinates (GCC)
-
Earth Rotation Parameters (ERP)
-
Orbit Parameters (ORB)
-
Satellite Clock Parameters (satCLK)
The orbit and satellite clock parameters are satellite specific, while all other parameters are based on observations of multiple satellites of one or more GNSS.
The parameter estimates based only on GPS or only on GLONASS result in independent, so-called GPS-only and GLONASS-only solutions (solutions of type A, see Table 1).
A conventional combined GPS/GLONASS solution (solution of type B, see Table 1) analyzes the observations from both, GPS and GLONASS. In that case, the two GNSS share all the previously mentioned parameters, except the satellite clock and the orbit parameters, which are by definition satellite specific. Solutions of type B are more precise and more robust, and they have a smaller standard deviation for the common parameters, given that all observations from the used GNSS are equally well modeled. Solutions of type B are also produced routinely by the CODE and other IGS ACs.
From a geophysical point of view, the estimated parameters from the GPS-only and GLONASS-only solutions are expected to be identical. In practice, however, this is not necessarily the case (see Fig. 1 in Sect. 1). To study the influence of the GNSS on the geodynamic parameters, a third type of solutions (solutions of type C, see Table 1) was created, where the global geodynamic parameters are kept GNSS-specific while the remaining parameters are based on observations of both systems. Both, the GLONASS and the GPS solutions therefore have identical receiver clocks, troposphere parameters and station coordinates but system-specific GCCs and ERPs. A great advantage of this parametrization is that any influence caused by the different constellation geometry of the GNSS is mapped directly to the geodynamic parameters and cannot be absorbed by any of the shared parameters. It also means that both systems have the same terrestrial reference frame, allowing a proper comparison of the geodynamic parameters derived from the two GNSS.
To study in greater detail the effect of the number of planes in a GNSS, a fourth type of solutions (solutions of type D, see Table 1) was generated, where the geodynamic parameters are derived separately for two artificial GPS sub-systems (GPSo and GPSe) and for GLONASS. The GPS sub-systems are obtained by splitting the GPS constellation into two groups of three orbital planes each (GPSo containing the odd-numbered planes and GPSe containing even-numbered planes), where the planes within each group are separated by \({120}^{\circ }\) in the equator, and the two sub-systems are rotated by about \({60}^{\circ }\) relative to each other. The number of the orbital planes and the spacing between them is therefore the same as for GLONASS. During the time period analyzed, the amount of active satellites per sub-system varied between 13 and 18 and was on average around 16. The amount of satellites per plane varies between 3 and 8, but is mostly between 5 and 6. The differences in the ascending nodes of the orbital planes between GLONASS and GPSo were \({\sim }{15}^{\circ }\) and between GLOANSS and GPSe \({\sim }{75}^{\circ }\).
All results (Sects. 3 and 4) are based on solutions of types B (CMB), C (GPS and GLO) or D (GPSe and GPSo). A powerful feature of the Bernese GNSS Software is that it allows to compute these three solution types based on the same Normal Equation system (NEQ). One only has to set up one general NEQ for each day with satellite-specific ERPs and GCCs. These parameters can then be combined for any subset of satellites of any GNSS. This is a great advantage since it ensures consistency between solutions, saves computing time, and increases flexibility.
2.3 Discussion of method
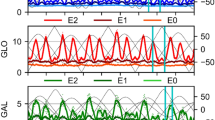
We first discuss how the GPS-only and GLONASS-only solutions (solutions of type A) compare to the GPS and GLONASS solutions of type C. Figure 2 shows the amplitude spectra of the geocenter z-coordinates and the spectra of the differences of the pole coordinates w.r.t. the IERS 08 C04 series.
The amplitude differences of the GPS spectra between solutions of type A and C are small (a few millimeters for the geocenter z-coordinate and a few \(\upmu \)as for the pole coordinates). For GLONASS, only a few amplitudes are similar in solutions of type A and C, e.g., the signals at 3 cpy for the geocenter z-coordinates differ by only 3 mm. In general, the amplitudes of the geodynamic parameters are smaller in solutions of type C than in solutions of type A, especially for shorter periods. This is confirmed by comparing the Root Mean Square (RMS) values of the time series of the geodynamic parameters (see Table 2). The RMS values of the GLONASS time series are reduced by 7% for the geocenter z-coordinate and by more than 30% for the pole coordinates. The signal close to the 8 days period, which coincides with the repeat period of the GLONASS ground tracks, is considerably reduced in the GLONASS spectra of solution type C (surprisingly, the pole x-coordinate of solution C shows a spurious signal at 8 days, while all other parameters show—as expected—no such signal). This indicates that the consistency of station coordinates and troposphere parameters (resulting from the common terrestrial reference frame) matters for ERPs and GCCs estimates.

Spectral behavior of the geocenter z-coordinate (top row), the difference of pole x-coordinate (middle row) and y-coordinate (bottom row) w.r.t. the IERS 08 C04 series. The left column shows solutions of type A and the right column solutions of type C
Finally, we analyze the common station coordinates in solutions of type B, C, and D. The station coordinates differ slightly between solution types because of the different parametrization of the geodynamic parameters. These differences are negligible. As an example, we compare the direct differences of station coordinates from solutions of type B and D (where the largest differences were encountered). Figure 3 shows that these differences are mostly on the sub-millimeter level (between solutions of type A and C, they are several millimeters). Furthermore, a 7-parameter Helmert transformation between the coordinate sets of solutions of type B, C and D did not reveal any significant parameters, which precludes systematic differences. The solutions of type B, C and D are therefore consistent, and a comparison of the geodynamic parameters of the different constellations is justified.

Direct coordinate differences of each station between solutions of type B and D in up, north and east for each day in the year 2014
3 Geocenter coordinates
3.1 Comparison of the spectra
Figure 4 shows the estimated geocenter z-coordinates based on the different GNSS constellations from the solutions of type B, C and D (Table 1). It also shows the \(\beta \) angle of the systems’ orbital planes. The x- and y-coordinates of the geocenter are not shown, because the differences are less pronounced for these parameters (see Table 3).
The estimates of the z-coordinates for GPS and the combined solution are very similar. GPSo and GPSe have slightly larger amplitudes with respect to GPS. For these three systems, the values stay below 7–8 cm in absolute value. None of the GPS time series show as large excursions as the one for GLONASS (about 20 cm). The GPS time series are close to the combined solution, indicating that the combined solution is dominated by GPS. The formal errors, which should reflect the mutual contributions of GPS and GLONASS, will be discussed later on. For GLONASS, the local extrema of \(\beta \) match the local extrema of the estimates. This correlation results in a 3 cpy periodicity, as already discussed by Meindl et al. (2013). For the GPS sub-systems, this correlation is only very weak, indicating that the inclination angle is more important than the number of planes.

Geocenter z-coordinate and \(\beta \) angles of the corresponding GNSS constellation. \(\beta \) is not shown for the combined solution for the sake of readability
Figure 5 shows the amplitude spectra of the z-coordinate estimated with GPS, GLONASS, the combined solution and the two GPS sub-systems. Compared to GPS, GPSe has slightly larger amplitudes at 1 cpy and 2 cpy and a smaller one at 3 cpy, while GPSo has slightly larger amplitudes at 1, 2 and 3 cpy. As expected from the time series, these differences in the amplitude spectra are very small and do not reach the extent of the GLONASS values.
To characterize the amplitude spectra of the geocenter coordinates quantitatively, we compute the RMS of the corresponding time series. According to the discrete form of Parseval’s theorem (Press et al. 2007), the RMS can also be computed in the frequency domain using the amplitudes of the corresponding Fourier series:
N is the number of data points in the time series, and \(x_n\) is the value of the n-th data point. \(X_k\) are the coefficients of the discrete Fourier transform of the time series. This relation allows to compute the RMS for specific frequency intervals, by including only terms of the Fourier series falling within the frequency interval of interest. A characterization of the noise in specific frequency intervals is therefore possible. Here, we compare the RMS for periods below and above 30 days. The separation at 30 days is chosen because periods above that value include the long-periodic harmonics of the draconitic year, while periods below correspond mostly to orbital periods and repetitions of satellite geometries. Table 3 shows the total RMS values and the RMS related to periods below and above 30 days. The RMS of the geocenter z-coordinate for periods below 30 days in the GLONASS solution is more than 3 times larger than for GPS, while for periods above 30 days it is about 5 times larger. The RMS of the two GPS sub-systems is only a few mm larger than for GPS (for both long and short periods). The RMS for the geocenter x- and y-coordinates show that the differences in the estimates of these parameters are almost independent of the GNSS. These values confirm and quantify the statements made in the previous paragraphs related to the spectra of Fig. 5.

Amplitude spectra of the geocenter z-coordinate from GPS, GLONASS and the combined solution (top) and from GPS, GPSo and GPSe (bottom)
A strong correlation between the z-coordinate and \(\beta \) is also seen in the formal errors stemming from the least squares adjustment. The formal errors of the geocenter z-coordinate estimate and the corresponding absolute values of \(\beta \) are shown in Fig. 6 for GLONASS and the GPS sub-systems. The a posteriori RMS of unit weight is identical for all GNSS because all solutions are based on the same NEQ, allowing a direct comparison of the formal errors. A strong correlation with \(|\beta |\) can be seen for all the systems. The largest errors occur when all orbital planes have similar \(|\beta |\)-values. Other local maxima occur when two planes have similar \(|\beta |\)-values, unless one of the three planes has a \(|\beta |\)-value close to zero. In such a case, the formal errors have a minimum. A simple comparison of the formal errors is possible by studying the median over the time series. With a median of 4.3 mm, the formal errors of GLONASS are more than a factor of 2 larger than the median for the GPS sub-systems (1.9 mm for GPSo, 2.1 mm for GPSe).

Formal errors of geocenter z-coordinate from GLONASS, GPSo and GPSe
Figure 7 compares the formal errors of all systems. The median of GPS (1.3 mm) is very close to the median of the combined solution (1.2 mm). It is about a factor of 1.5 smaller than the median of the GPS sub-systems. The difference between GLONASS and GPS is therefore larger than between the GPS sub-systems and GPS. By comparing only the maximum values of the time series, this difference is even more pronounced. The formal errors of the GPS sub-systems regularly assume values very close to the one of GPS or of the combined solution. GLONASS, however, never reaches such a quality. The formal errors of GLONASS are generally larger than those of GPS and its sub-systems.

Formal errors of geocenter z-coordinate from GLONASS, GPSo and GPSe

Formal errors of all GPS and GLONASS satellites in z-direction on January 1, 2012, without (top) and with (bottom) geocenter estimation. In the bottom figure, the GLONASS satellites with the largest amplitudes belong to the plane with the largest \(|\beta |\) (\({42}^{\circ }\))
3.2 Formal errors of satellite positions
To see whether the generally larger formal errors of GLONASS are only caused by the correlation of the geocenter z-coordinate with SRP parameters or whether they are a general characteristic of GLONASS, we study the formal errors of the satellite positions.
Figure 8 shows the formal errors of the z-coordinates of the satellite positions in the quasi-inertial reference system (which in essence coincides with the geocenter z-coordinate) of all GPS and GLONASS satellites observed on January 1, 2012. It is calculated from a solution with geocenter estimation (Fig. 8 bottom) and from a solution with a fixed geocenter (Fig. 8 top). Both solutions have the same a posteriori RMS of unit weight and are therefore comparable. The formal errors of the satellite positions are computed by propagating the formal errors of the satellites’ osculating orbital elements, pseudo stochastic pulses and empirical SRP parameters (Jäggi et al. 2006). January 1, 2012, was chosen because both, the geocenter z-coordinates and their formal errors of GLONASS and GPSo have large values. Furthermore, the values of \(|\beta |\) of the orbital planes of these two systems show a similar behavior: Two planes have almost the same \(|\beta |\) and the third plane \(|\beta |\) is a few degrees larger. GPSe behaves different in all these aspects on that day.
The formal errors of the z-component of the satellite positions in Fig. 8 have small peaks at noon for all systems. These peaks are caused by the stochastic pulses estimated at noon for each satellite in the radial and in along-track directions. The formal errors at the day boundaries are larger for all systems (far from the center of data). In the solution with geocenter estimation (Fig. 8 bottom), we see a similar behavior as for the formal errors of the geocenter estimates in Fig. 7 on the same day: GPSe has the smallest formal errors (median 2.3 mm), for GPSo it is larger by a factor of 1.7 (median 4.0 mm), and for GLONASS by a factor of more than 4 (median 10.1 mm). If these differences were only caused by the \(\beta \) values of the planes and by the fact that the geocenter is estimated in this solution, we would expect no differences in the formal errors of the orbits in a solution without geocenter estimates. For the GPS sub-systems, this is the case (Fig. 8 top). The formal errors of GPSo (median 2.1 mm) are now almost the same as the ones of GPSe (median 2.2 mm), while for GPSe the formal errors remain almost the same. The formal errors of GLONASS are significantly reduced (median 4.7 mm) but still remain more than a factor of 2 larger than the formal errors of the GPS sub-systems. In the x- and y-coordinates, the formal errors of GLONASS are about a factor of 2 larger than for the GPS sub-systems, independently of whether the geocenter is estimated or not. These observations let us conclude that the large formal errors for GLONASS are indeed in part caused by the correlation of the geocenter z-coordinate with \(\beta \) but also that GLONASS has generally larger formal errors whether the GCCs are estimated in the solution or not.
In a last experiment, we want to study whether the previously observed differences in formal errors of the satellite positions between GLONASS and GPS without geocenter estimation may be caused by a lower percentage of reduced ambiguities for GLONASS (about 45–50% for GLONASS and 85–90% for GPS). An additional solution without geocenter estimation and without ambiguity resolution for GPS and GLONASS was therefore computed for the same day (Fig. 9) to eliminate the differences caused by the different number of resolved ambiguities. The a posteriori RMS of unit weight was rescaled to the same value as the one in Fig. 8 to allow a direct comparison. As expected, the formal errors of all systems increase. The difference between GLONASS (median 7.6 mm) and the GPS sub-systems (median 6.1 mm for GPSo, 5.4 mm for GPSe) is reduced but not completely eliminated. A further reason for these remaining differences might be that the station network is less dense for GLONASS than for GPS. In the time period analyzed here, about 80% of the stations were tracking both, GPS and GLONASS, while 20% only tracked GPS. The pacific region showed a particularly small number of stations tracking GLONASS.

Formal errors of all GPS and GLONASS satellites in z-direction on January 1, 2012, without geocenter estimation and without ambiguities resolved
We conclude that a reduction of the number of orbital planes in a GNSS from 6 to 3 has only a minor effect on the geocenter estimates. Apart from the correlation of the geocenter z-coordinate with the SRP parameters, the generally larger formal errors for GLONASS orbits may also have a negative impact on the geocenter z-coordinate estimate. Better orbit models, in particular for GLONASS, might improve the estimates.
4 Polar motion
The difference of our polar motion estimates w.r.t. the corresponding IERS 08 C04 values is analyzed subsequently. The spectra of the time series of these differences were computed to search for systematic differences (Figs. 10 and 11). GLONASS, GPSo and GPSe, i.e., all the systems with 3 orbital planes, have a distinct signal at 3 cpy. For the y-coordinate this signal is particularly large for GLONASS and GPSe. The combined and the full GPS solutions have a much smaller amplitude at this period in both coordinates. The difference between the spectra of GPSo and GPSe could be explained by the fact that the two sub-systems are, due to the different ascending nodes of their orbital planes, oriented in a different way relative to the heterogeneously distributed global station network.

Amplitude spectra of the differences of the pole x-coordinate to the corresponding IERS 08 C04 series from GPS, GLONASS, the combined solution and RGo (top) and from GPS, GPSo and GPSe (bottom)

Amplitude spectra of the differences of the pole y-coordinate to the corresponding IERS 08 C04 series from GPS, GLONASS, the combined solution and RGo (top) and from GPS, GPSo and GPSe (bottom)
As the pole coordinates derived from 3-plane GNSS all have these systematic differences w.r.t. the IERS 08 C04 series, we ask the question how pole coordinates based on a combination of 2 systems with 3 planes each behave. Such a situation might occur in future by combining GLONASS and Galileo. For that purpose, we introduce an additional virtual system named RGo. RGo consist of a combination of GPSo and GLONASS, i.e., the geodynamic parameters for these two systems were combined to form an additional solution next to GPS, GLONASS and the GPS sub-systems. This combination was realized analogously to the solutions of type B, C and D in Table 1. The ascending nodes of the orbital planes of GPSo and GLONASS differ only by \({\sim }{15}^{\circ }\) during the considered time interval. This small difference in the ascending nodes was chosen to study how a combination of two 3-planes systems behaves under rather unfavorable constellation geometries.
Figures 10 and 11 contain the amplitude spectra of RGo. For the x-coordinate RGo has also a larger amplitude than the full GPS at 3 cpy, which is however by a factor 2 smaller than for GLONASS or the GPS sub-systems. In the y-coordinate, this amplitude of RGo is the smallest one. A combination of these two 3-plane systems therefore reduces the signal at this period, despite the relatively small difference in the ascending nodes. It seems that the larger number of planes and satellites in the RGo constellation and the differences in inclination of the two combined systems lead to a more stable constellation geometry of RGo. This may be explained by the findings from Dach et al. (2009), showing that a combination of two systems with different orbit properties can reduce geometric effects of the single systems.
To quantify the differences in the amplitude spectra, the RMS of the spectra is calculated in analogy to Sect. 3. Table 4 provides the results. GLONASS has the largest RMS values. Compared to GPS, the largest values are associated with periods above 30 days (up to a factor of 1.9). For these periods, the GPS sub-systems also have an RMS which is up to 1.8 times larger than for the full constellation (apart from GPSe for the x-coordinate). The RMS values for RGo lie between the ones for the combined solution and for the GPS sub-systems.
From the study of the spectra, we conclude that 3-plane systems show systematic differences to the IERS 08 C04 series, in particular at 3 cpy. An increased number of orbital planes or a combination of different GNSS reduces these deficiencies.
In analogy to the spectral analysis of the GCCs, we study the formal errors of the pole coordinates (Fig. 12). As in the case of the geocenter, we see periodic variations of the formal errors. The correlation with \(\beta \) is, however, more difficult to see than for the geocenter z-coordinates. The variations are also different for the x- and y-coordinates of the pole. This is not surprising, because the ERPs provide the transformation between the Earth-fixed and the quasi-inertial reference system and not coordinates within one and the same reference system, as the GCCs do. The formal errors of GLONASS are the largest ones, followed by those of the GPS sub-systems, RGo, GPS and eventually by the combined solution (medians in Table 5). The median of the GPS sub-systems is less than a factor of 1.5 smaller than that for GLONASS, while the corresponding factor was about 2 for the GCC. Furthermore, the errors of the GPS sub-systems are larger than for the complete GPS system and do not regularly reach the same level of GPS, as it is the case for the geocenter z-coordinate (see Sect. 3.1).

Formal errors of the pole y-coordinate from GPS, GLONASS and the combined solution (top) and from GPS, GPSo and GPSe (bottom)
We conclude that the pole coordinates estimated with a 3-plane GNSS may result in systematic differences with a 3 cpy signature. The formal errors of the estimates show a similar pattern. We also showed that the combination of two 3-plane systems of the orbital planes reduces the initially observed differences, even when the two systems have similar ascending nodes. Future combinations of 3-plane systems as, e.g., GLONASS and Galileo, should therefore improve the ERP quality. Estimating the pole coordinates based on a GNSS with more than 3 orbital planes or on a combination of different GNSS in general reduces ERP inconsistencies.
5 Summary and conclusions
Motivated by Meindl et al. (2013), we studied the impact of the number of orbital planes in a GNSS on the geodynamic parameters. For that purpose, the geocenter and pole coordinates were estimated for GPS, GLONASS, a combined GPS/GLONASS solution, and two GPS sub-systems consisting of 3 orbital planes each. One-day solutions referring to the years 2012–2014 were analyzed. The solutions were generated by setting up daily NEQs containing satellite-specific GCCs and ERPs, allowing it to associate the geodynamic parameters with different GNSS. The other parameters, like station coordinates, troposphere parameters and receiver clock parameters, were considered as common parameters to all GNSS. By using the same NEQs as a basis for each solution, parameter estimation is rapid, consistent and the terrestrial reference frame is the same for all solutions.
As expected from previous studies, a strong dependency of the geocenter z-coordinate on the \(\beta \)-angle was confirmed. For GLONASS, values up to 20 cm are reached, while the combined solution, GPS and the GPS sub-systems all had values below 7–8 cm. The geocenter z-coordinate estimated with the sub-systems did not differ by much from the one estimated with the complete GPS constellation, leading to the conclusion that the estimation of the GCCs with 3 instead of 6 orbital planes is not disadvantageous. The analysis of the spectra and the RMS errors confirmed this observation. Furthermore, we could see that the combined solution is dominated by GPS, which can be explained by the large formal errors of GLONASS. The formal errors of the geocenter z-coordinate showed a strong dependency on the \(\beta \)-angle, as well. GLONASS has the largest values, while the GPS sub-systems have values close to those of the complete GPS constellation and the combined solution. The analysis of the formal errors of the satellite positions showed that the estimation of the geocenter based on GLONASS does lead to an increase of the formal errors w.r.t. an estimation without geocenter. This result may be explained by the correlation of the geocenter z-coordinate with the \(\beta \)-angle. It could, however, also be shown that GLONASS satellites have generally larger formal errors in the satellite positions than GPS satellites, which can be explained in part by the smaller amount of resolved ambiguities. The generally larger formal errors of the GLONASS satellite positions may therefore also contribute to the bad quality of the GLONASS derived GCCs. A full explanation of this mechanism asks for more research.
The spectra of the differences of the estimated pole coordinates w.r.t. the IERS 08 C04 series were analyzed for all systems including a combination of GPSo and GLONASS (RGo). All systems with 3 orbital planes showed a distinct signal at 3 cpy. GPS and RGo did not show this feature. The analysis of the formal errors supports this observations. We conclude that 3 instead of 6 orbital planes in a GNSS may lead to systematic differences in the estimates of polar motion. A combination of different GNSS, regardless of the orientation of their nodes, reduces these differences. When estimating pole coordinates with future GNSS with 3 planes, such as the European Galileo or the MEO-constellation of the Chinese BeiDou, we therefore recommend to use GNSS combinations to avoid these artefacts in the time series.
Notes
Errors with the period of the revolution of the Sun w.r.t. an orbital plane (351.5 days for GPS and 353.2 days for GLONASS, Meindl 2011), and harmonics thereof.
References
Altamimi Z, Collilieux X, Métivier L (2011) ITRF2008: an improved solution of the international terrestrial reference frame. J Geod 85(8):457–473. doi:10.1007/s00190-011-0444-4
Arnold D, Meindl M, Beutler G, Dach R, Schaer S, Lutz S, Prange L, Sośnica K, Mervart L, Jäggi A (2015) CODE’s new solar radiation pressure model for GNSS orbit determination. J Geod 89(8):775–791. doi:10.1007/s00190-015-0814-4
Beutler G, Brockmann E, Gurtner W, Hugentobler U, Mervart L, Rothacher M, Verdun A (1994) Extended orbit modeling techniques at the CODE processing center of the international GPS service for geodynamics (IGS): theory and initial results. Manuscr Geod 19:367–384
Beutler G, Rothacher M, Schaer S, Springer TA, Kouba J, Neilan RE (1999) The international GPS service (IGS): an interdisciplinary service in support of Earth sciences. Adv Space Res 23(4):631–653
Bizouard C, Gambis D (2009) The combined solution C04 for Earth orientation parameters consistent with international terrestrial reference frame 2005. Int Assoc Geod Symp. doi:10.1007/978-3-642-00860-3_41
Blewitt G (1997) Self-consistency in reference frames, geocenter definition, and surface loading of the solid Earth. J Geophys Res 108(B2):2156–2202. doi:10.1029/2002JB002082
Dach R, Brockmann E, Schaer S, Beutler G, Meindl M, Prange L, Bock H, Jäggi A, Ostini L (2009) GNSS processing at CODE: status report. J Geod 83(3):353–365. doi:10.1007/s00190-008-0281-2
Dach R, Schaer S, Lutz S, Meindl M, Bock H, Orliac E, Prange L, Thaller D, Mervart L, Jäggi A, Beutler G, Brockmann E, Ineichen D, Wiget A, Weber G, Habrich H, Ihde J, Steigenberger P, Hugentobler U (2013) Center for orbit determination in Europe (CODE). In: Dach R, Jean Y (eds) International GNSS service: technical report 2013 (AIUB). IGS Central Bureau, Pasadena, pp 21–34
Dach R, Lutz S, Walser P, Fridez P (eds) (2015) The Bernese GPS software version 5.2. user manual, Astronomical Institute, University of Bern, Bern Open Publishing. ISBN 978-3-906813-05-9. doi:10.7892/boris.72297
Dick WR, Thaller D (eds) (2014) IERS annual report 2012. International Earth Rotation and Reference Systems Service. Central Bureau, Bundesamt für Kartographie und Geodäsie, Richard-Strauss-Allee-11, 60598 Frankfurt am Main, Germany, ISBN 978-3-86482-058-8
Dong D, Dickey JO, Chao Y, Cheng MK (1997) Geocenter variations caused by atmosphere, ocean and surface ground water. Geophys Res Lett 24(15):1867–1870. doi:10.1029/97GL01849
Dong D, Dickey JO, Chao Y, Cheng MK (1999) Geocenter variations caused by mass redistribution of surface geophysical processes. IERS Tech Note 25:47–54
Dow JM, Neilan RE, Rizos C (2009) The international GNSS service in a changing landscape of global navigation satellite systems. J Geod 83(3–4):191–198. doi:10.1007/s00190-008-0300-3
Gambis D (2004) Monitoring earth orientation using space-geodetic techniques: state-of-the-art and prospective. J Geod 78(4–5):295–303. doi:10.1007/s00190-004-0394-1
Griffith J, Ray JR (2012) Sub-daily alias and draconitic errors in the IGS orbits. GPS Solut 17:413. doi:10.1007/s10291-012-0289-1
Jäggi A, Hugentobler U, Beutler G (2006) Pseudo-stochastic orbit modeling techniques for low-Earth orbiters. J Geod 80(1):47–60. doi:10.1007/s00190-006-0029-9
Jäggi A, Weigelt M, Flechtner F, Güntner A, Mayer-Gürr T, Martinis S, Bruinsma S, Flury J, Bourgogne S (2015) European gravity service for improved emergency management—a new Horizon 2020 project to serve the international community and improve the accessibility to gravity field products. EGU General Assembly 2015, Vienna, Austria, 12–17 April 2015
Meindl M (2011) Combined analysis of observations from different global navigation satellite systems. Geodätisch-geophysikalische Arbeiten in der Schweiz, vol 83, Eidg. Technische Hochschule Zürich, Switzerland
Meindl M, Beutler G, Thaller D, Dach R, Jäggi A (2013) Geocenter coordinates estimated from GNSS data as viewed by perturbation theory. Adv Space Res 51(7):1047–1064. doi:10.1016/j.asr.2012.10.026
Press HW, Teukolsky SA, Vetterling WT, Flannery BP (2007) Numerical recipes: the art of scientific computing, 3rd edn. Cambridge University Press, Cambridge
Ray J, Altamimi Z, Collilieux X, van Dam T (2008) Anomalous harmonics in the spectra of GPS position estimates. GPS Solut 12(1):55–64. doi:10.1007/s10291-007-0067-7
Ray J, Griffiths J, Collilieux X, Rebischung P (2013) Subseasonal GNSS positioning errors. Geophys Res Lett 40(22):5854–5860. doi:10.1002/2013GL058160
Rebischung P, Altamimi Z, Springer T (2014) A collinearity diagnosis of the GNSS geocenter determination. J Geod 88:65–85. doi:10.1007/s00190-013-0669-5
Rodríguez-Solano CJ (2013) Impact of non-conservative force modeling on GNSS satellite orbits and global solutions. Ph.D. thesis, Technical University of Munich
Rodríguez-Solano CJ, Hugentobler U, Steigenberger P, Blossfeld M, Fritsche M (2014b) Reducing the draconitic errors in GNSS geodetic products. J Geod 88:559–574. doi:10.1007/s00190-014-0704-1
Sušnik A, Dach R, Villiger A, Maier A, Arnold D, Schaer S, Jäggi A (2016) CODE reprocessing product series. Published by Astronomical Institute, University of Bern. doi:10.7892/boris.80011
Wu X, Ray J, van Dam T (2012) Geocenter motion and its geodetic and geophysical implications. J Geodyn 58:44–61. doi:10.1016/j.jog.2012.01.00
Acknowledgements
The study was funded by the Swiss National Science Foundation in the frame of the Project “Advanced Satellite Orbit Modelling for GPS, GLONASS and Galileo” (200021_153429).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Scaramuzza, S., Dach, R., Beutler, G. et al. Dependency of geodynamic parameters on the GNSS constellation. J Geod 92, 93–104 (2018). https://doi.org/10.1007/s00190-017-1047-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00190-017-1047-5