
Abstract
The logistics market has been impacted by increase of e-commerce, mass customization, omni-channel distribution, and just-in-time philosophy. In order to attend to this dynamic change, automation has been applied in warehouses. Although, some researches point out the lack of flexibility as a bottleneck. Therefore, a comprehensive literature review of recent papers is vital to draw a framework of the past and to shed light on future directions. This paper aims to review published papers in the last ten years related to flexible automation in warehouses and to construct a framework that could guide future researchers in the construction of an innovative conceptual model that may be applied at warehouses in the future. A total of 113 papers published between January 2008 and December 2018 have been selected, reviewed, and categorized to construct a useful foundation of past research. Results showed the key point to achieve a flexible automated warehouse is the combination of automated equipment, data collection technologies, and management solutions. Finally, based on the reviewed papers, an innovative framework of a flexible automated warehouse is proposed.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Just-in-time philosophy promoted a change in the market conditions going from large orders of the same product to small orders of a variety of products. Furthermore, productivity, agility, and customization are the main necessities driven by market conditions. These changes in market scenario turned product life cycles shorter [1] and changed the paradigms for automation, moving from high volumes to small volumes with variety [2].
Due to these changes, the logistics market has been impacted by the increase of e-commerce and mass customization as well as the need for reduction time-to-market to maintain competitiveness. Just-in-time philosophy, mass customization, e-commerce, and omni-channel distributions influence the supply chain causing the need to automate logistics processes and to achieve an improvement in performance in a shorter period of time [3, 4]. Yamazaki et al. [5] and [3] reinforce the global need for automation systems in such circumstances.
At the logistics process, goods are placed on pallets for transportation and stacking. Therefore, pallet detection and handling become a necessity to achieve automation. Casado et al. [3] presented a detection system to identify and track pallets in the working environment of autonomous mobile forklift trucks obtaining a highly flexible pallet handling system that could be applied in shared spaces with humans.
In order to attend to the new market trends, Bučková et al. [6] pointed out some questions that should be considered for planning and designing a warehouse. The effectiveness of storage management, the methods of picking or modifications of goods according to the order, and the influence of automated systems are among them. Bučková et al. [6] discusses the influence of new technologies. Virtual factory as 3D modeling, automated static capacity calculations, computer simulation, and automated data collection are some of the technologies mentioned as solvers to main current trends in designing warehouses.
Wang et al. [7] investigated the potential applicability and configuration of a future generation automated warehouse concept. The authors described a physical structure and operational mechanism of a reconfigurable automated system consisting of simple modules with an application of the RFID-based control and management system. The new design proposed was more compact and significantly reduced the number of operators.
Mancio and Sellitto [8] presented a conceptual review about flexible manufacturing systems (FMS), which is a manufacturing system that can process various types of parts simultaneously on the various workstations with some flexibility that allows the system to react to anticipated or unforeseen changes. Warehouse and distribution centers are critical components of supply chains and are directly affected by changes in the processing of materials because they store too many different items. The main activities of a flexible warehouse are receipt of product and customer orders, storage, shipment, and order picking, which are different from the FMS [9].
Automated warehouses are evolving into more intelligent storage systems without the need of installing fixed structures that complicate and reduce the scalability and flexibility to future changes. The current trend is to make them as flexible as possible [10]. Although the importance of automation systems is notable, challenges as flexibility against market fluctuation and the management risk owning to high investment costs need to be discussed and solved. Few studies have been conducted to optimize the equipment configuration of automation systems enhancing flexibility [5].
Based on the need to automate warehouse process and the bottlenecks about the lack of flexibility, it is necessary to research the concept of flexible automation applied to warehouses to help upcoming research focus on future directions. Hence, the research gap of this study is the insufficient information about flexibility in automated warehouses that limits the construction of a framework of a flexible automated warehouse.
The purpose of this research is to perform a comprehensive literature review of flexible automation in warehouses in order to construct a framework that could help to develop and design a flexible automated warehouse. The proposed framework aims to help future researches and specialists to create a conceptual model that regards flexibility in warehouses, especially in material handling activities. Therefore, a bibliometric analysis, categorizing and examining 113 papers published between 2008 and 2018 was conducted.
This research is organized as follows. Section 2 provides an overview of the evolution of automation. Section 3 classifies order picking systems due to its importance in warehouses. Section 4 presents the methodology used to collect and analyze papers for the review. Section 5 provides an analysis of the reviewed papers. Section 6 presents the proposed flexible automated warehouse framework, and Section 7 provides a conclusion about the study.
2 Evolution of automation
The term automation is originated from the word automatic, and it was first widely used by D.S. Harder in 1946 to describe the production policies applied [2]. Groover [11] defines automation as the technology by which a process or procedure is performed without human assistance, and it integrates power, a program of instructions and a control system to carry out the instructions. A set of programmed instructions transforms a manual process in an automatic process, which will not depend on human interference to happen anymore. Automation in manufacturing systems can be classified into three basic types: fixed automation, programmable automation, and flexible automation.
Fixed automation, also known as hard automation, has little or no flexibility to accommodate product variety. This lack of flexibility occurs because the program of instructions is configured according to the equipment design and configuration. Due to this, the procedures are fixed and hard to change. This type of automation is used in the extensive production of the same product [11, 12].
In programmable automation or soft automation, the equipment is designed with the capability to change the program of instructions to allow production of different parts or products. This adaptable feature results in lower production rates and more flexibility, when compared to fixed automation. Although programmable automation offers more flexibility allowing to produce a variety of goods, the required time spent to change the equipment configuration, known as setup time, affects production. In order to end the setup time, flexible automation was created [11].
Flexible automation allows any required change in the program of instructions enabling continuous production of different parts or product styles [13]. Flexibility is a term used to describe the ability of a system to respond cost-effectively to changes in volume requirements, product-mix requirements, machine status, and processing capabilities. Investing in flexible automation allows to strategically have more product variety and shorter product life cycles.
Flexible automation has emerged as a dominant trend. The development of flexible manufacturing systems (FMS) and solutions based on flexibility ideas (flexible assembly systems, flexible selection, picking systems, automated warehouses, and modern material handling) began in the eighties of the last century [14].
Automation is implemented using various hardware devices that interact with the operation to do a specific task. In automation, sensors are required to measure the process variables, actuators are used to drive the process parameters, and various additional devices are needed to interface the sensors and actuators with the process controller, which is usually a digital computer [11]. Reduction or elimination of routine manual and clerical tasks, improvements in worker safety and product quality, reduction in lead time, and the accomplishment of processes that cannot be done manually are some of the reasons that justify the need for automation [15].
Nowadays, the fourth industrial revolution, also known as Industry 4.0, introduced some emerging technologies that have been integrated into automation systems in order to control the whole system in real time and to allow rapid adaptability according to the dynamic market changes. Internet of Things (IoT), cyber-physical systems (CPS), big data, artificial intelligence (AI), and cloud computing are some of the emerging technologies introduced by Industry 4.0 [16]. These technologies represent a powerful tool to increase productivity and have received considerable attention recently [17].
The enabling technologies that have been mostly applied in warehouses and flexible systems are mainly IoT and CPS. The IoT means all objects in a factory (such as automated equipment, products, and human operators) are connected to the internet and share information. When all objects are online, entirely new possibilities emerge for developing intelligence and adaptability. Cyber-physical systems feature a combination of computational and physical elements. CPS enables autonomous and flexible automation systems in several fields, such as automotive systems, distributed robotics, and fabrication systems [18].
3 Classification of order picking systems in warehouses
According to [19], (i) warehouse is a storage place for products and its main activities include receipt of product, storage, shipment, and order picking; (ii) distribution warehouse (DW) is a warehouse that stores finished goods and from which customer orders are assembled; and (iii) distribution center (DC) is a warehouse facility which holds inventory from manufacturing pending distribution to the appropriate stores. As this article focuses on order picking and material handling activities from inventory, the term warehouse will be used throughout the paper.
An order picking system (OPS) is the process which retrieves products from storage according to a specific customer request. According to [1], OPS is considered the most labor-intensive operation in warehouses with manual systems, and a very capital-intensive operation in warehouses with automated systems. OPS’s activities affect distribution centers directly and thereby the supply chain’s performance. For these reasons, to improve productivity, OPS’s activities are considered the highest-priority area.
Various technologies can be used in picking systems. Therefore, the right order picking system is challenging to decide and choose. Even though warehouse design is a critical activity in logistics systems modeling, OPS design has not been frequently studied in the literature [20]. Most of the researches focus on a specific OPS or a given design issue, while overall design procedures and global optimization models for order picking are still lacking [21].
Dallari et al. [22] developed a methodology to support warehouse designers in choosing the most suitable OPS and proposed a classification in five main classes, which are picker-to-parts, pick-to-box, pick-and-sort, parts-to-picker, and automated picking. Automation level increases, ranging from picker-to-parts system to completely automated picking, as shown in Fig. 1. The research analyzed warehouses that were built in Italy between 2002 and 2006 to identify the main drivers affecting the choice of OPS.

Classification of order picking systems by [22]
In a picker-to-parts system, pickers walk along the aisles to pick items according to the customer order. A pick-to-box system divides the picking area into zones, each of them assigned to one or more pickers. All the picking zones are connected by a conveyor on which boxes filled up with picked items are placed, each of them corresponding to customer order.
In a pick-and-sort system, operators in the picking area retrieve the amount of every single item resulting from the batching of multiple orders and put it on a takeaway conveyor connecting the forward area with the sorting area. A computerized system then determines the destination bay for each item; each destination bay refers to individual customer order. Consequently, within these OPS, the batch size is consistently high.
In a parts-to-picker system, an automatic device brings unit loads from the storage area to the picking stations (also called picking bays), where the pickers select the required amount of each item. Potential equipment types for storage area are carousels, modular vertical lift modules, mini-loads, and AS/RS. This picking system reduces cost, labor hours, and space.
Dallari et al. [22] have not discussed a fully automated order picking system. Therefore, fully automated warehouse systems are now coming into use in which cranes or forklift trucks are controlled directly from the database, and radar or inertial sensing systems accurately monitor the position of the machine [23]. Automation level tends to increase in warehouses to satisfy market conditions. Consequently, a literature review is necessary to clarify future directions and a conceptual model for a flexible automated warehouse.
4 Research methodology
The logistics market has been impacted by the increase of e-commerce, mass customization, omni-channel distribution, and just-in-time philosophy. In order to attend this dynamic change, automation has been applied in warehouses, although some researches point out the lack of flexibility as a bottleneck. Hence, a comprehensive literature review was selected as the research method for this study because it suits our main objective, which is to draw a framework of the past and to shed light on future directions. Moreover, the literature review is a valuable methodology for developing propositions and discussing future research implications. According to [24], literature review has been already widely used to consolidate emerging topics in other areas.
The research methodology used in this paper is based on [25], which is consisted of four steps: material collection, descriptive analysis, category selection, and material evaluation.
4.1 Material collection
For material collection, the keywords selected were flexible automation, warehouse, distribution center, and picking. The search procedure was managed in the Web of Science (WOS) database, Scopus database, and IEEE Xplore digital library.
The research was performed using the logical operator (AND) to look for articles or proceedings papers related to the selected keywords. Searching for results that are related to the four selected keywords, all selected databases replied that there were no search results with the fields filled out. Therefore, the keywords were divided into three groups for the bibliographic survey of the themes, which were (i) flexible automation and warehouse, (ii) flexible automation and distribution center, and (iii) flexible automation and picking.
Figure 2 shows the results from three groups of keywords in WOS, Scopus, and IEEE Xplore. Moreover, Fig. 2 presents the number of papers retrieved from the last ten years, between January 2008 and December 2018. Although the same keywords were used in all databases, the number of papers related to the combined keywords changed. IEEE Xplore presented the most significant amount of papers published related to the combined keywords. However, it was the database that presented most technical engineering solutions focusing on a specific experimental problem, because most of the published papers were from conferences.

Bibliographic survey in Web of Science (WOS) database, Scopus database, and IEEE Xplore digital library
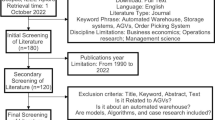
All papers selected were cross-checked with results of the same keywords in the three databases searched to ensure the reliability of the process of finding and selecting papers. Before analyzing the papers, all repeated and irrelevant articles based on abstract analysis were excluded. Most of the irrelevant papers excluded were related to data warehouse, energy generation for automated systems or did not add to the selected theme. Finally, 113 papers published between January 2008 and December 2018 were reviewed and classified in the literature.
4.2 Descriptive analysis
A historical analysis of publications is shown in Fig. 3. This study attempts to analyze 113 scientific papers published between January 2008 and December 2018.

Distribution of publications per year across the period of the study: 44 papers were published from 2008 to 2013 and 69 papers were published from 2014 to 2018
According to Fig. 3, 44 papers were published from 2008 to 2013, corresponding to an average of 7.33 publications per year. Therefore, 69 papers were published from 2014 to 2018, corresponding to 13.8 publications per year. As a result, this field of study increased to more than 88% in the recent 5 years. The result confirms a significant increase of researches concerning flexible automation applied in warehouses, distribution centers, and picking systems.
Reviewed papers consisted of 46 articles published in journals, 65 proceeding papers from conferences and symposiums, and 2 book sections and are shown in Table 1.
Authors who have a higher number of publications from January 2008 to December 2018 are shown in Table 2. From the papers that were reviewed, none of the authors has more than two publications, and some of them write together.
Considering the 46 articles analyzed, Table 3 shows the journals with more publications on the object of study. The maximum number of publications is four articles. From reviewed papers, journals with more than one publication are IEEE Access, International Journal of Advanced Manufacturing Technology, International Journal of Production Research, and Journal of Manufacturing Systems.
Most recent publications are from IEEE Access and International Journal of Advanced Manufacturing Technology in 2018. Both journals have robots and control systems as a subject option for submission. The significance of the subjects adopted by these journals indicates the relevance of robots and control systems to enhance the flexibility of automated warehouses.
The 65 proceeding papers from conferences and symposiums were analyzed. Table 4 shows the most relevant events with a higher number of publications for the field of study. Most recent publications are from a Chinese Automation Congress in 2017, with the theme “Intelligent Automation Changes the World.”
4.3 Category selection
The main contribution of this article is to build a framework that should help upcoming research and specialists in warehouses to construct and design a flexible automated warehouse that overcomes issues mentioned before, as the increase of e-commerce, just-in-time philosophy and products customization. Hence, analyzing the main activities performed in a conventional warehouse is essential to point out constructs and technologies that will characterize this flexible automated warehouse. According to [21], the main activities performed in warehouses currently are shown in Fig. 4, including (i) receiving, (ii) transfer and put away, (iii) order picking/selection, (iv) accumulation/sortation, (v) cross-docking, and (vi) shipping.

Typical warehouse activities adapted from [126]
The receiving activity includes unloading products from the transport carrier and updating inventory data. Transfer and putting away involves the transfer of incoming products to storage locations. Order picking is the most critical activity because it involves the process of obtaining products for a set of customer orders.
The accumulation/sortation of picked orders into individual orders is a necessary activity if the orders have been picked in batches. After picking, orders often must be packed and stacked on the right unit. Cross-docking is performed when the received products are transferred directly to the shipping docks. Due to market trends, some current activities tend to be replaced or weakened in updating structures of warehouses, such as the supplying process in batches.
The primary activity performed in a warehouse is material handling, which is focused on the input and output of stored goods usually packed in pallets [10]. In order to complete all the warehouse’s activities mentioned, warehouse inventory needs to be updated continuously. Therefore, it is necessary to collect data from inventory and also software to manage demand from receiving and shipping activities. Besides, automated equipment can speed up all processes. Therefore, based on the warehouse’s activities listed, three constructs were selected and analyzed in the papers. The constructs are (i) automated equipment, (ii) data collection technologies, and (iii) management solutions. The reviewed articles were categorized according to these constructs in order to build a framework that should give future directions in flexible automation in warehouses.
A detailed reading was done, and articles were categorized according to the constructs proposed. After, subgroups were created for each category emphasizing in the technology related to the paper. Hence, a framework would be created relating to the construct and technologies associated with the constructs.
4.4 Material evaluation
Validity’s rigor is achieved by cross-checking data from three different databases to ensure the enrichment of the study. Moreover, the problem solved, and technology analyzed/proposed/implemented will be analyzed in reviewed papers in order to identify possible technologies that can help in the construction of a flexible warehouse framework.
5 Detailed analyses of the literature
The selected papers of the literature review are discussed and analyzed in this section to construct the state-of-the-art concerning flexible automation applied in warehouses and distribution centers. The results can clarify the current gaps and future directions for research. The sections below are divided according to the construct and elements analyzed in reviewed articles based on the proposed framework.
The subsections were structured according to the technologies analyzed in the reviewed articles: (i) automated equipment, (ii) data collection technologies, and (iii) management solutions.
5.1 Automated equipment
After analyzing publications related to the construct automated equipment, subgroups were created according to the technologies discussed in the papers. The subgroups defined for this category are automated storage, robotics, and transportation systems as shown in Table 5.
Robotics represents the technology most discussed in the 42 papers related to the category automated equipment. Robotics corresponded to more than 85% of the papers read from automated equipment category. The significant number of researches concerning robotics is related to the applicability of this automated technology in other areas, such as manufacturing systems.
The main problems that were discussed among the papers consisted of (i) the need of flexible grippers to handle products of different shape, size, and weight; (ii) the need of flexible robots that can be rapidly reprogrammed to new tasks due to the rising mass customization and the rapid growth of e-commerce and; (iii) the lack of human-robot collaboration occasioned by unsafe robots issues. All these discussed problems and proposed/analyzed technologies as solutions collaborate to evolve research of warehouses regarding e-commerce, mass customization, omni-channel, and just-in-time philosophy trends.
Automated storage and transportation systems represent together only 15% of the technology discussed in the automated equipment category. However, some authors pointed out AGV is the ideal technology to use in a warehouse due to its flexibility.
The subgroups defined according to the papers that were read (automated storage, robotics, and transportation systems) are discussed in subsections below. A brief overview of the technology was conducted. Besides that, a summary of technologies analyzed/discussed is presented in each subsection.
5.1.1 Automated storage
Automated storage and retrieval system (AS/RS) represent a part-to-picker OPS. AS/AR is defined as a system that performs storage and retrieval operations with speed and accuracy based on automated equipment [127] and [128]. This system can sort, sequence, buffer, and store a wide range of items with high accuracy and efficiency [17]. AS/RS reduces labor requirements and avoid capital expansion by exploiting unused vertical space, which will guarantee greater long-term productivity. Shivanand et al. [129] describe three classes of AS/RS, including (i) unit load AS/RS, (ii) mini load AS/RS, and (iii) carousel AS/RS. Weight and size handling characteristics categorize classes.
A conventional AS/RS consists of storage racks erected along aisles with unique or regular cell conveyors, input/output (I/O) stations for receiving and sending items, and storage/retrieval (S/R) machines for providing transport between I/O stations and storage cells. Manzini et al. [128] identified the most critical factors affecting the response of an AS/RS system and presented a dynamic multi-factorial analysis, capable of supporting the management of AS/RS operating in flexible conditions. The study identified and measured the combined and not combined effects of different system parametrizations on the performance of a unit load and less than a unit load part-to-picker OPS. Although, the author concluded OPS design on the management of supply chain activities is not sufficiently discussed in the literature.
In a conventional AS/RS, a stacker crane is installed in the picking aisle for reaching and accessing the storage cells. The stacker crane can travel simultaneously in the vertical and horizontal direction to store and retrieve products. After, retrieval products are placed on a roller conveyor and sorted by order. Conventional AS/RS only handles unit loads of products. It is suitable when the variety of loads stored in the system is low and the throughput requirement is high [32].
As mentioned before, the rapid growth of e-commerce has led to large numbers of small orders composing a great diversity of categories and irregular items. However, a full pallet is often too large, costly, and inefficient for handling small and diversified orders. In order to solve this problem, a study conducted by [32] proposed a new AS/RS with the ability to cross aisles and engage in three-dimensional movement. The three-dimensional movement provides more accurate travel time calculation than alternatives. Hence, the study contributed to the design of a more flexible AS/RS system.
Wang et al. [35] concluded implementations of RFID technology applied to the automation of storage and retrieval systems in a warehouse create a better visualization and traceability of inventory, and it has also demonstrated a significant improvement in warehouse data handling efficiency and space utilization. The study compared an AS/RS system with RFID-enabled automated storage and retrieval racks (AS/RR) system and concluded AS/RR system can significantly improve the efficiency of storage, retrieval, and replenishment operations and increase warehouse flexibility and capability. An AS/RR system consists of the implementation of an RFID-enabled warehousing system where each item can be stacked onto storage racks (S/R) at a random location wherever a place is available for incoming goods. Thus, an item can also be distributed from an S/R at a random location throughout the warehousing system.
Considering the formerly discussed technologies related to automation in warehouses, AS/RR system is the most modern technology to promote the integration of supplying and retrieving activities. Moreover, this technology can reduce picking time because it removes the need to have an operator to move products along the aisles.
5.1.2 Robotics
Thirty-six reviewed papers discussed the use of robots to increase the performance of a warehouse by palletizing, picking, and packing solutions or as human collaborators. Problems discussed among the papers are (i) the need of flexible grippers to handle products of different shape, size, and weight; (ii) the need of flexible robots that can be rapidly reprogrammed to new tasks; and (iii) the lack of human-robot collaboration occasioned by unsafe robots issues.
Robots are used to perform repeatable processes with little variation by constant precision and high speed. Therefore, customized products are a challenge [46]. In projects implementing flexible automation in warehouses, robots can be used mainly for packing, picking, and palletizing solutions. They are also known as robot manipulators [42]. A primary robot system is composed of the mechanical structure, actuators, control computer, and sensors [129].
A flexible robot should include (i) the ability to be rapidly re-tasked without the need to be shut down for an extended period of time when a new operation needs to be performed; (ii) the ability to recover from errors, so that when a part is dropped, the robot can assess the situation and determine the best way to proceed to accomplish a goal; and (iii) the ability to quickly swap in and out from different manufacturers, so that a company is not tied to a single robot brand [46].
The rapid growth of e-commerce increases the need for more massive warehouses and their automation. Therefore, using robots as assistants to human workers becomes a priority. Fully automated warehouses use removable racks that can be lifted by small and autonomous robots. By bringing the product to the worker, productivity is increased by a factor of two or more, while simultaneously improving accountability and flexibility [4].
In cases where a supervisory system controls the robot, there is a need to be able to estimate worker’s intentions correctly and control the robots accordingly, so that the warehouse operations efficiency is ensured, and safety is guaranteed. Petković et al. [4] presented an algorithm for human intention recognition in flexible robotized warehouses and demonstrated the proposed algorithm predicts human warehouse worker’s desires in an intuitive manner simulation. During this research, the warehouse worker is placed in a simulated 2D warehouse environment with a task. The task can be actions related to the job functions of a warehouse worker, as items that need to be picked. The worker’s actions, moving and turning, are observed and validated using a Markov decision process framework.
To achieve automated packaging, the solution must be able to provide reliable detection and pose estimation for the targeted parts during the packaging process. Also, the automated robotic picking function of randomized parts stored in bins must be operated.
Kang and Kim [106] developed a robotic vision system for random bin picking using dual-arm robots that consists of a vision, robot, and control system. To perform concurrent picking operations in multiple bins, the proposed system detects target objects to be picked in each bin from the input image based on stereo vision and calculates the position and orientation of the candidate objects. The system analyses whether the concurrent picking operation is possible by comparing the position and orientation of the picking candidates selected from each bin. According to the documented result, it changes the target candidates or transmits them to the robot control system to perform the picking operation. The picking positions of the target objects are transformed into robot coordinates.
In order to solve the challenging issue for automated grasping of random and vulnerable objects, [63] developed an innovative, compliant finger for a robotic grasping application using a proposed topology optimization method. The gripper module consists of one actuator and two identical compliant fingers prototyped by 3D printing, which uses a flexible filament, and it can be installed on general industrial robot arms (such as a six-axis robot or SCARA robot) to perform grasping tasks. The experimental results showed the developed compliant finger could be used to pick and place a variety of objects with size and shape variations (such as fruits, glass products, and balloons). Also, it can be utilized to handle vulnerable objects without causing damage.
One of the advantages of using a robot in flexible systems is that the portability, re-usability, adaptability, and interoperability of an open robot platform encourage other researchers to use and evolve available implementations instead of developing their implementation for each robot.
Table 6 presents a historical overview of the most important and relevant papers found in reviewed papers that proposed or analyzed robot solutions that could help to develop a more flexible warehouse. For the construction of Table 6, 36 papers concerning the development of robots for use in warehouses were initially analyzed. Only the works that enhance flexibility in the robots were brought to Table 6. The criterion used to classify the papers was based on the relevance of the research for the knowledge that existed at that moment.
5.1.3 Transportation systems
The demand for flexible automation has significantly increased the use of automated guided vehicles (AGVs) in automated warehouses [10]. AGVs are vehicles equipped with automatic guidance systems that are capable of following prescribed paths. Differentiating from traditional robots, AGVs are not manipulators. They are driver-less vehicles that are programmed to follow a guided path. In an automated warehouse, AGVs move pallets and containers [129]. An AGV is an automated technology of parts-to-picker OPS system [128].
Problems discussed in papers that developed a transportation system are (i) smaller order deliveries in a warehouse, (ii) challenging to meet new demands of logistics warehouses, and (iii) the necessity to detect and transfer pallets. All of these problems are related to the factors mentioned before like e-commerce, and mass customization in manufacturing that are forcing warehouses to deliver smaller orders and increasing both flexibility and service quality while restraining operating costs [3].
In order to deliver smaller orders, Kobat et al. [86] developed a low-cost automatic parcel delivery system composed of a table unit and a transport robot. The work of the table unit pushes out a parcel to the transport robot, and the transport robot moves the parcel to the truck. The table unit obtains external information through a camera. However, the authors did not describe the system of the robot transfer.
In 2016, Lopez et al. [10] presented a hybrid approach that allows using the forklift truck with cognitive capabilities that can be operated manually or autonomously. The proposed solution includes a vision system installed onboard the AGV to detect the pallets in the working environment. This approach reduces the number of sensors installed in the warehouse facilities, increases flexibility, and reduces both the installation costs and the deployment time.
Chun-Fu et al. [115] proposed a mechanical and control system architecture of visual navigation for AGV in a small agile warehouse, which simulated the logistics warehouse environment, and tested the navigation performance of the designed AGV to attend to the new demands of logistics warehouse. Experimental results showed the navigation is flexible, high precision, stable operation, and visual navigation for AGV can satisfy the demand for flexible storage.
Pallet detection and handling become a necessity to achieve automation to attend to new demands. Due to this, a detection system, based on a 2D pattern recognition, was presented to detect, identify, and track pallets in the working environment of autonomous mobile forklift trucks. The detection method is an automation solution designed to retrofit manually operated forklift trucks, adding a new autonomous working mode, obtaining a highly flexible pallet handling system that could be applied in shared spaces with humans. This system is composed of cameras to reduce the number of sensors installed in the warehouse facilities, increasing the flexibility and reducing installation costs and deployment time [3].
The main advantages of using an AGV in a flexible warehouse system are (i) flexibility: AGVs can be quickly reprogrammed to change their tasks or the path of operation, eliminating the need for expensive physical equipment installation and enabling changes to respond to demand variations; (ii) efficiency: AGVs can be added as required by the growth of the operation as demand increases, allowing a gradual implementation depending on the workload. These systems can be easily integrated with robotic cells and other storage machinery. Also, AGVs can get access to transport goods automatically without human labor; (iii) precision: as technology improves, a more precise space localization is available obtaining good stock management precision. Time precision can also be obtained due to the optimization systems, allowing a just-in-time delivery; (iv) economic: an excellent price/quality ratio can be obtained decreasing the running and maintenance costs. It also reduces labor costs; and (v) safety: AGVs offer a safe and predictable method of pallet management while avoiding interference with human and building factors.
Automated warehouses are evolving into more intelligent and flexible storage systems to respond to future changes. For these reasons, some authors point out AGV is the ideal technology to use in a warehouse due to its flexibility [10]. Although AGVs provide these benefits, they are in the warehouse environment travel among multiple workstations by following a set of predetermined routes. The management becomes a challenging problem, especially when bidirectional routes are used to gain efficiency and flexibility of the warehouse [38]. Management techniques to deal with this problem are showed in future topics of this research.
Table 7 presents a historical overview of the most important and relevant papers found in reviewed papers that proposed or analyzed transportation system solutions that could help to develop a more flexible warehouse. The table shows the paper published, year of publication, and technology proposed/discussed.
5.2 Data collection technologies
Driven by market changes, a future warehouse should attend the demand for a variety of small orders, high speed, and low cost. China’s warehousing automation level is low, and operators spend sixty to seventy percent of the time picking goods [72]. Improving the efficiency of pickup and put up goods from inventory has become one of the critical issues in the current logistics industry. Therefore, it is essential to know precisely where goods are stored and to collect and retrieve them as fast as possible.
Problems discussed in data collections technologies’ category papers include the necessity to (i) reduce the time from picking activities, (ii) control inventory on real time, and (iii) estimate material positions integrating it with a management system in real time to allow faster decision-making.
After analyzing publications related to the construct data collection technologies, two subgroups were created according to the technologies discussed in the papers: labeling technologies and picking technologies. Hence, the subgroups defined for this category, labeling technologies and picking technologies, are shown in Table 8 and discussed in the subsections below. A brief overview of the technologies was done. Besides that, a summary of the technologies analyzed/discussed is presented below.
5.2.1 Labeling technologies
To manage a warehouse efficiently, it is essential to know what and where each item is stored, or summing it up, to control inventory. On manual control inventory, operators need to read the labels of the different items, count them, and record the information on a clipboard for later analysis. This procedure requires time and collected data can be wrong due to human error [57]. To solve this problem, different types of labels such as barcodes, 2D data codes and radio frequency identification (RFID) facilitate automatic reading, and operatives can carry hand-held scanners around the warehouse to speed up the task [23].
Barcode readers and RFID scanners can be placed at the entrance and exit of the warehouse to keep the database up to date with all goods arriving and departing, giving a continual real-time inventory and theoretically removing the need for regular stocktaking. A barcode is read by measuring the relative widths of the bright and dark regions of the reflected light. It can be scanned from right to left or left to right and at an angle, and it may contain check digits to detect and correct reading errors. However, items need to be scanned individually and closely by barcode scanners or sensors [7].
In contrast, RFID tags can store several thousand digits and can be read in long-distance recognition using radio frequencies via wireless communication networks. The tag has a microchip to store the data and a tiny antenna to communicate it. Detailed data labels can be attached to or embedded in goods and read automatically, without the manual process involved in scanning barcodes. An RFID reader can read all nearby tags at the same time, and it can read through the packaging material, which gives advantages over optical coding when handling pallets and crates of goods. In a warehouse, each item attached with an RFID tag can be traced, sorted, inventoried, routed, picked, and distributed from anywhere throughout the system. Chetouane [34] provided an overview of contributions of RFID technology and also described RFID-based automation of a flexible conveyor system.
Kuo et al. [36] proposed the use of a lower cost RFID to develop a solution to the problem of position estimation. Once the picking cart position is known, the picking route can be planned, in order to provide the shortest picking distance. However, if the warehouse’s layout changes, then it is necessary to recollect the data [36].
A solution for the transportation logistics of perishable products across the manufacturing supply chain was proposed in 2015 through a system that integrates RFID capabilities and the wireless sensor network (WSN) technology. This system serves as reliable decision-making inputs when materials, products, and information are moved across the supply and demand chains, and it reduces the material’s transportation cost [57].
In order to facilitate the real-time data collection, RFID has been proposed to capture manufacturing data, aiming at real-time synchronization of the physical flow of materials and associated information flow [56]. Optical and RFID labels are used in picking goods to fulfill customers’ orders, for checking goods in and out of the warehouse and keeping an up-to-date inventory.
Acquiring inventory data in real time can speed up the process from picking activities in a warehouse and consequently help reducing logistics time. Due to this, [33] proposed an intelligent control system for a digital workshop production which includes the use of RFID technology to acquire the manufacturing information in real time produced by the bottom-level manufacturing devices [33].
The use of RFID and WSN technologies which, when integrated together, can provide the following advantages: (i) increased transportation control by having adequate information about the transportation conditions; (ii) reduced costs related to late deliveries, such as out of stock costs, lost sales costs, and penalties imposed by customers; (iii) increased agility and responsiveness in the face of disturbances related to the spoilage of materials and products during transportation with the added benefit of reduced orders fulfillment disruption; (iv) significantly reduced delivery of unacceptable quality materials and products to customers, which protects the organizations’ public image [57].
By combining any of these label-reading technologies with appropriate software systems, a fully integrated and sophisticated management system can be achieved by incorporating inventory, remote customer order entry, purchasing, and all other aspects of enterprise resource planning. Zhong et al. [56] presented an RFID-enabled real-time manufacturing execution system (RT-MES) which RFID devices were deployed systematically on the shop floor to track and trace manufacturing objects and collecting real-time production data. Disturbances were identified and controlled within RT-MES. The system contributed to plan and schedule decisions more precisely, eliminate the manual and paper-based data collection that is error-prone, tedious, and time-consuming, and upgrade the shop floor data to a level that is real-time, complete, and accurate, making the system more flexible enabling a real-time adaptive decision-making. Besides this, the system leads to better performance in quality, logistics, and production [56].
Moreover, data collection technologies can be used in simulation software to make periodic simulations of requirements for warehouse and to estimate capacity utilization in logistics. Using such a simulation model, managers can test multiple variations of corrective actions and select the most suitable solution in terms of capacity and economic indicators [6].
In order to solve issues from the current logistics industry, a layout of a flexible automated warehouse joining RFID and QR code information to provide robot-positioning data was proposed by Xiao-Long et al. [72]. The authors also analyzed logistics processes from the proposed warehouse’s layout considering time and traffic conflict.
Table 9 presents a historical overview of the most important and relevant papers that proposed or analyzed labeling technologies that could help to develop a more flexible warehouse. The table shows the paper published, year of publication, and technology proposed or discussed.
5.2.2 Picking technologies
In order to efficiently manage an OPS, it is essential to know exactly where items are stored. Simple physical labels give a unique address to every shelf and rack in the warehouse, and databases record the address against every item. There are various ways of communicating picking instructions to human operators, including a pick-by-light and pick-by-voice solutions [23].
In most of the warehouses, workers separate orders by moving around in the warehouse and collecting goods from positions listed on a clipboard or displayed on a hand-held computer. A more sophisticated approach is to pick by voice, which each worker wears a headset, a microphone, and a belt-mounted wireless computer, and moves through the warehouse to locations directed by the headset. Pick-by-voice is an approach to separate orders that leave the worker’s hands and eyes free to move, guaranteeing worker’s safety, improving order picking accuracy, and allowing gloves to be worn in operations inside freezers.
The pick-by-light approach is a light-directed picking that improves order fulfillment performance by reducing the time spent walking between items required by the order and removing the errors associated with reading paper pick lists. This approach requires indicators permanently mounted on the shelf units. The indicator lights up to attract the worker’s attention, and it displays a number that shows how many items are to be picked from that location. Each operator has a particular work zone, and for each order, all the relevant indicators light up simultaneously. Lightning pick technologies increase pick rate productivity, accuracy, and cost efficiency of the labor-intensive process. Furthermore, this approach is ideal for team-based approaches like zone picking.
Another lighting solution is a put-to-light approach. Put-to-light is a light-directed order sortation. This solution optimizes batch picking, and high-speed sortation operations with a process sometimes called pick-to-light in reverse. With put-to-light, operators scan an item and the locations representing a store or customer needing that item to illuminate. From straightforward scan-and-put workstations and put walls, to more complex sortation applications. This approach maximizes speed and accuracy.
Upon arrival at the put-to-light sorting area, each item is scanned. This procedure triggers the light-directed picking modules to illuminate at every put location where the item is required to complete the order. Pickers distribute the items accordingly and extinguish the light once the task is complete. After an order is filled, the light-directed picking module indicates the order is complete and ready to ship.
Put-to-light is a space-efficient and economical method of fast, high-quality order sortation for companies with a large number of SKUs. Lightning pick’s put walls, put workstations, and other put-to-light solutions offer significant operational efficiency gains, additional capacity, and increased visibility into order progress and productivity rates.
Among reviewed articles, these mentioned technologies have been discussed only by Connolly [23], who affirms lightning picking technologies lead to faster picking than any competing operator-based technology. Global brands emphasize the use of these technologies to increase warehouse flexibility, turning it adaptive to changes. Although, more research needs to be done about these technologies in order to prove its efficiency.
5.3 Management solutions
After analyzing publications related to the construct management solutions, subgroups were created according to the technologies discussed in the papers. Hence, subgroups were created according to the technologies addressed to management solution category. Subgroups defined for this category are software solutions, routing of AGVs and conveyors, picking optimization, and simulation solutions (Table 10).
The primary function of a warehousing system is to receive products from manufacturing lines, to store materials until they are requested, and then to extract products from the inventory and ship them in response to the customers’ orders [27]. Due to the change in the market scenario, as the increase of e-commerce, shorter delivery windows has been requested. Therefore, manual processes are causing order errors and disappointed customers. Distributions centers are realizing their manual resources have reached the limits of their productivity levels. In order to protect profit margins and succeed in this ultra-competitive environment, automation has been introduced in warehouses and distributions centers.
In a warehouse, efficient managing is required to deliver products to customers as soon as possible [48]. According to Accorsi et al. [27], operational control is one of the main aspects to increase performance in warehouses. Operational control includes zoning, batching, and routing activities. The management and control of activities and processes of a warehouse range among some design alternatives. This design alternatives can help to determine the best layout design, the definition of the total storage capacity, the determination of the number of aisles, the types of racks, and the locations of the products.
The subgroups defined according to the read papers (software solutions, routing of AGVs and conveyors, picking optimization and simulation solutions) are discussed in subsections 5.3.1 to 5.3.4.
5.3.1 Software solutions
Companies today have been introducing enterprise resource planning (ERP) systems to achieve better integration and flow of information between business functions inside and outside an organization [56].
Warehouse management system (WMS) is a software solution that enables connectivity to ERP systems. It has been developed for monitoring and handling warehouse resources and operations. This system, however, depended strongly on operators to enter and update daily information through a barcode-based system. Furthermore, a new concept of WMS can be built by combining labeling technologies [23] and [7]. It provides a real-time view of material handling, including inbound and outbound product flow, inventory tracking, order management, and waving. Nevertheless, WMS has minimal decision-making on warehouse design and optimization.
Warehouse control system (WCS) also enables connectivity to ERP systems, and it provides the machine-level integration that allows material handling equipment to take instructions from other systems and performs a specific, predefined function. The WCS is limited because it lacks the visibility to inventory, orders, and people necessary to provide on-demand decision-making capabilities. The logistics company KALEIDO SCM managed in Valadares –Vigo (Spain) had been testing a prototype of WCS. In this system, an AGV is connected via Wi-Fi to the central control system that is in charge of commanding new tasks and controlling the traffic. Also, the automated forklift truck included the addition of a set of sensors and actuators connected to the PLC. As a conclusion, the system has enhanced scalability by a modular, flexible, and easily extended framework [10].
Software technologies become increasingly complex due to the need for flexibility of business processes, system reconfiguration, and engineering processes [117]. Software solutions usually need real-time and accurate data to generate perfect decisions. The lack of data collection technologies could cause severe gaps between the flow of information or decisions [56]. Therefore, in order to attend the increasing need for automation and to attend flexibility comes the warehouse execution system (WES). WES is the latest commercial distribution software, which its purpose is to enable higher degrees of automation.
Unlike the WMS and WCS, the WES connects material handling equipment and automation systems along the facility to enable the coordination needed to execute sophisticated automation workflows. Recent WES offerings have evolved to provide integrated, machine-level control with varying degrees of automation to address the full spectrum of modern order fulfillment needs, including AS/RS, utilizing shuttles and cranes, robotic picking, and automatic palletizing. The advantages of WES have been discussed by warehouses and distributions centers, although there is no information about this latest system in the reviewed literature.
5.3.2 Routing of mobile robots
Transport robots routing and optimization are a research problem in flexible warehouses due to the necessity to reduce the total distance traveled by the robots and to avoid collision [38, 80, 127].
In 2016, a study carried out by Draganjac et al. [39] pointed out the industrial state of the art at that point relied on a centralized controller, which dispatches transport missions to vehicles along predetermined paths. Although this approach easily ensures correct system operation, it suffers from several bottlenecks: paths have to be predefined, which is time-consuming; centralized planning does not scale well, not adapting according to the growth of the number of vehicles. Draganjac et al. [39] presented an algorithm for decentralized path planning and motion coordination control for multi-mobile robot systems. This paper showed that each vehicle plans its path to complete assigned missions and negotiates with other vehicles for the right of way in order to avoid collisions. This approach improves system performance, makes vehicle plans optimal, and helps robots reach their goals via the shortest path. It also solves the scalability issues, as each vehicle makes its own plan and negotiates for priority only with near vehicles in the cases when conflicts arise [39].
When multiple AGVs are employed, collisions may happen. Due to this, Zhao et al. [110] proposed an ant colony algorithm to avoid collisions and simulated this environment to illustrate the effectiveness of the algorithm. Results demonstrated that the algorithm makes the path more secure, stable, and efficient. After that, Zhang et al. [38] studied the collision-free route planning problem for the multi-AGVs system in a warehouse and proposed three solutions based on the status of AGV: (i) select the candidate route, (ii) the later AGV waits before starting, and (iii) modify the routes of later AGV. The proposed route planning approach improved the traditional collision waiting solution adding the status of the AGV. Moreover, it increases the efficiency of the automated warehouse system.
Some authors suggest a weak point of transporting material by AGVs is to consider only the values of variables in the current time for decision-making. Therefore, Carida et al. [111] proposed a prediction model based on Petri nets to optimize routes by reading data from a virtual factory. The proposed model was tested on several scenarios of a virtual FMS, and important information has been extracted from the production system that can help in AGV routing optimization. From these data, more confident decisions can be made to optimize routing from material transportation by AGVs increasing the performance of a warehouse.
As the increasing number of tasks, the AGV should make task decision a priority to determine which task to implement first and which to execute next in order to the cost of all the tasks. Elango and Nachiappan [80] developed a simulation model involving task priority and the utilization of robots. The models try to minimize the average queue waiting time and the total completion time as low as possible with a reasonable robot utilization percentage. Effects of average waiting time, total time, and robot utilization on task priority variation are analyzed under known and unknown task availability. Although, a detailed scalability analysis by varying the number of robots and the number of tasks could also be performed [80].
Table 11 presents a historical overview of the most important and relevant papers that proposed or analyzed the mobile robot routing that could help to develop a more flexible warehouse. The table shows the paper published, year of publication, and technology proposed/discussed.
5.3.3 Picking optimization
Order picking costs represent more than 55% of the operational costs of a distribution center, and the picking time accounts for 30 to 40% of the total operation time consumed in a distribution center [68]. Therefore, the optimization of the order picking process is critical to optimize the whole order fulfillment process. Consequently, to deal with this dynamic environment, it is necessary to rearrange the layout or to modify the system structure based on changing functions, volumes, technology, and product mix [26]. On the other hand, re-layout demands time and costs. These costs are comparable with that of unnecessary handling costs. For this reason, the layout cannot be changed as soon as circumstances change. Instead, a trade-off between handling and re-layout costs is necessary to appropriate change decisions in order to minimize costs and reduce picking time.
The traditional approach adopted to increase flexibility in warehouses consists of configuring manual pick-and-place tasks using human operators. Although, this approach leads to increasing time in picking activities and to human errors due to the complexity of these activities. Order picking problems identified consists of (i) how order sheets are combined and assigned to workers, (ii) how workers make the shortest planned route to collect products specified by given order sheets, and (iii) how products are assigned to shelves in a warehouse [48]. Nowadays, it is possible to monitor the state of picking warehouse activities in real time, including the position of picker, vehicle position, and the status of a picking task, turning the real-time control of these systems at a reasonable cost possible.
In the last few years, innovative, flexible systems have been developed and implemented. Basile et al. [9] proposed a control-oriented model which can be used for online monitoring, scheduling, and rescheduling of activities by using simulation. The model proposed is low-cost, modular, and scalable. Also, it is built online by associating a Petri net module to each active task. The availability of the current state of the activities allows the rescheduling from the current system state as well as the evaluation of the discrepancy between the actual performance from the expected one.
Later, Iwasaki et al. [48] proposed an order picking method considering the situation that workers attempt to pick the same product at the same time on the same shelf. Simultaneously, working on the same shelf affects the management of collecting the remaining products by adding a new traveling path and complexity. Worker scheduling was formulated as a job-shop scheduling problem. Numerical experiments showed the proposed method improved worker scheduling compared with rule-based scheduling.
Accorsi et al. [27] presented a decision support system (DSS) for the design, management, and control of warehousing systems. The proposed DSS considers both strategic warehouse design and effective operations management. Which can simulate the logistics and material handling performances of a warehousing system. Heuristic methods and algorithms address several critical warehouse issues, such as the order picking process, which is responsible for 55% of the overall costs in a distribution center.
Moreover, Boschetti [30] presented an approach for a circular conveyor that was applied to a robotic work cell integrated with a computer vision system and a rotating feeder. The method is based on suited motion profiles that allow the robot to correctly reach, follow, and pick the parts moving on a rotating bowl. Hence, the robot is able to pick parts from the circular feeder without the need of stopping its rotation. This approach was applied to an assembly system. However, it may be applied in warehouses where circular conveyors can use in order to optimize the layout and to reduce picking times.
In order to operate efficiently and safely, robot assistants should recognize human intentions. Petković et al. [4] presented an algorithm for human intention recognition in flexible robotized warehouses in order to operate efficiently and safely and demonstrated that the proposed framework predicts human warehouse worker’s desires in an intuitive manner.
Huang and Mok [68] described the design and implementation of an autonomous pick-and-place system which is able to accurately and robustly recognize a target object among a cluster of objects. These objects are placed in front of the robot, which picks up the object and places it in a designated location with a two-finger gripper (or a suction cup) and completes the task fast enough to satisfy realistic real-time constraints in a factory warehouse. This system integrates a set of state-of-the-art techniques in computer vision, deep learning, and trajectory optimization to create a library of skills that can be composed to perform a variety of robotic tasks. Although, the authors mentioned future research should investigate more flexible ways to program the robotic arm to perform tasks that require tight coordination of various types.
Several picking optimization methods were presented. Although, current technology for pick-and-place tasks is still insufficient to meet the demand for low-cost automation. So, the question is what is the most efficient and accurate method of picking the ordered items from SKUs for online orders? Huang and Mok [68] presented a group order picking method, to reduce the picking, sorting, and packaging time. This paper contributes to making decisions on the design and the control of order picking systems at the tactical or operational level.
Table 12 presents a historical overview of the most important and relevant papers that proposed or analyzed picking optimization methods that could help to develop a more flexible warehouse. The table shows the paper published, year of publication, and the method proposed/discussed.
5.3.4 Simulation solutions
The main challenges in designing a warehouse are the need for flexibility, modularity, and adaptability. The use of simulation to warehouse designing, for fast static capacity calculations, allows a systematic design of the design process and the identification of bottlenecks. Moreover, the use of simulation solutions can detect, anticipate, and eliminate problems that may occur in the storage process. Recently, companies begin to use digital factory concepts to accelerate the designing process and to eliminate the risk of wrong design [6]. Digital factory consists of digitizing, modeling, simulating, and emulating a system. It is used to understand the processes and to find out solutions for possible bottlenecks. Also, digital factory can be used for the optimization of real warehouse systems. It helps managers to make responsible decisions based on the capture of real status or expected status of the system. Moreover, this technology can increase quality and accuracy of management decisions and decrease time to adopt to new situations with more significant potential for cost savings.
Bučková et al. [6] discussed how digital factories could impact and contribute to design warehouses. It concluded that this technology could allow managers to make smart decisions readapting the system to attend dynamic market demands in a shorter period. Moreover, the paper described the benefits of using digital factory steps in warehouse designing. Among the benefits, there is the capacity (i) to create a conceptual model, (ii) to determine warehouse’s specifications as capacity and handling units, (iii) to create and evaluate a model, (iv) to plan and optimize operations, and (v) to redesign existing processes.
The enabling technologies from Industry 4.0, as well as Internet of Things, big data analytic, cloud computing, and cyber-physical systems started to be adopted and studied to enhance the e-commerce logistics in terms of system level, operational level, and decision-making enabling real-time decisions. Kaihara and Yao [18] proposed an integrated system which executes actual control of a real system and simulation of a virtual system interactively based on the cyber-physical systems concept for these dynamically changing environments. Simulations are executed, and future fluctuations are forecasted. Based on simulation results, scheduling parameters and scheduling methods are modified to respond to future situations and optimize the system.
Zúñiga et al. [16] presented a literature review of Industry 4.0 enabling technologies allied to simulations for optimization and to the lean concept. These emerging technologies, combined with simulation systems for optimization are a powerful tool to reduce time, increase productivity, and adapt systems according to the dynamic market.
Table 13 presents a historical overview of the most critical and relevant papers that contributed to analyzing the use of simulations to optimize warehouses. The table shows the paper published, year of publication, and method proposed/discussed.
6 Flexible automated warehouse framework
According to the reviewed literature, a flexible warehouse should (i) increase productivity, (ii) enhance flexibility and space utilization to accommodate the growth in SKUs, (iii) have higher throughput and faster deliveries. Therefore, automation is necessary to achieve these factors. However, fixed mechanized and automated systems are unable to adapt to changes in product mix and market demand. To meet the demands, warehouse technology must be flexible by rapidly responding to challenges as continued growth in omni-channel fulfillment, new competitive threats, shorter delivery cycles or unexpected advance in technology. A flexible automated warehouse needs to use automation solutions that are easy-to-deploy and modular and include the embedded intelligence required to take advantage of machine learning and other developments.
The reviewed literature points out that the critical point to achieve a flexible automated warehouse is the combination of automated equipment, data collection technologies, and management solutions. This system needs to be able to collect data, increase visibility into operations, improve coordination and communication across systems, and adapt to changes in real time. New technologies have been created and tested in warehouses based on the manager’s knowledge and experience; however, few studies have been made to validate its effectiveness in the system. Based on the literature review, Table 14 presents a framework of a flexible automated warehouse.
The framework presented in Table 14 shows the technologies found in the literature review that should enhance flexibility in an automated process in a warehouse, in order to increase productivity and efficiency and to attend market trends. The review shows that the use of unique technologies cannot characterize a flexible automated warehouse. Hence, the combination of technologies mentioned is necessary to represent a flexible automated warehouse.
The purpose of the framework is to describe technologies that can be applied in a warehouse to obtain a flexible automated warehouse. Managers can adopt the automated technologies options presented by the framework according to the actual automation level of the warehouse, investment capacity, and competitors’ initiatives. The framework supports managers to assertively decide about technologies that may be applied in the warehouse to enhance flexibility in warehouses, based on the real or expected automation level in the warehouse. Hence, technological options adopted by the warehouse managers can impact and collaborate with the design and operation processes.
In addition, the framework can be used to help upcoming research in the construction of a conceptual model for a flexible automated warehouse capable of adapting according to dynamic market changes. Moreover, the framework can also describe a research agenda for testing different simulations scenarios to evaluate the effectiveness of the technologies proposed in the framework. Also, the framework can help upcoming researchers to apply a more realistic model of the framework using real data related to the technologies discussed, exploring protocols integrations among technologies.
7 Conclusion
This paper presents a comprehensive literature review of recent papers about flexible automation applied in warehouses. One hundred thirteen published papers between January 2008 and September 2018 were selected, reviewed, categorized, and analyzed to find the future directions and opportunities of research in flexible automated warehouses.
The gaps in the literature are identified and discussed to clarify future research opportunities for authors. Although predicting what any warehouse will look like in the future as technology continues to advance is very unlikely, it is possible to anticipate the requirements those warehouses will need to meet to adapt to the new market conditions caused by the e-commerce, just-in-time philosophy, product customization, and omni-channel.
Finally, based on the reviewed literature, the main contribution of this study is an innovative framework of a flexible automated warehouse to guide future researches on the construction of a conceptual model. The proposed framework exposes the idea that the critical point to achieve flexibility in an automated warehouse is the combination of automated equipment, data collection technologies, and management solutions. Although new technologies have been created and tested in warehouses, few studies have been made to validate its effectiveness in the system. For future research, it is recommended to add material handling equipment as a keyword for the review, due to the frequency that this term is presented in the papers reviewed.
References
Goetschalckx M, Ashayeri J (1989) Classification and design of order picking. Logistics World 2(2):99–106
Jovane F, Koren Y, Boër CR (2003) Present and future of flexible automation: towards new paradigms. CIRP Ann Manuf Technol 52(2):543–560
Casado F, Losada DP, Santana-Alonso A, et al. (2017) Pose estimation and object tracking using 2d images. Procedia Manuf 11:63–71
Petković T, Marković I, Petrović I (2017) Human intention recognition in flexible robotized warehouses based on markov decision processes. In: Iberian Robotics Conference, Springer, pp 629–640
Yamazaki Y, Shigematsu K, Kato S, Kojima F, Onari H, Takata S (2017) Design method of material handling systems for lean automation—integrating equipment for reducing wasted waiting time. CIRP Ann Manuf Technol 66(1):449–452
Bučková M, Krajčovič M, Jerman B (2017) Impact of digital factory tools on designing of warehouses. J Appl Eng Sci 15(2):173–180
Wang Q, McIntosh R, Brain M (2010) A new-generation automated warehousing capability. Int J Comput Integr Manuf 23(6):565–573
Mancio VG, Sellitto MA (2017) Sistemas flexíveis de manufatura: definições e quadro de trabalho para futura pesquisa. Revista GEINTEC-gestão Inovaç,ão e Tecnologias 7(2):3760–3773
Basile F, Chiacchio P, Del Grosso D (2012) A control oriented model for manual-pick warehouses. Control Eng Pract 20(12):1426–1437
López J, Pérez D, Vaamonde I, Paz E, Vaamonde A, Cabaleiro J (2016) Building a warehouse control system using ride. In: Robot 2015: Second Iberian Robotics Conference, Springer, pp 757–768
Groover MP (2007) Fundamentals of modern manufacturing: materials processes, and systems. John Wiley & Sons
Craig JJ (2013) Introduction to robotics, mechanics and control 3.ed. 3 edition
MacDuffie JP, Pil FK (1997) From fixed to flexible: automation and work organization trends from the INternational Assembly Plant. Transforming Automobile Assembly, pp 238?-254
Gania IP, Stachowiak A, Oleśków-szłapka J (2017) Flexible manufacturing systems Industry 4.0 solution Number icpr
Wiktorsson M, Granlund A, Lundin M, Södergren B (2017) Automation and flexibility: an apparent or real dilemma? In: Innovative quality improvements in operations, Springer, pp 35–48
Zúñiga ER, Moris MU, Syberfeldt A (2017) Integrating simulation-based optimization, lean, and the concepts of industry 4.0. In: 2017 Winter Simulation Conference (WSC), IEEE, pp 3828–3839
Ying Y, Wang X, Zhong RY, Huang GQ (2017) E-commerce logistics in supply chain management implementations and future perspective in furniture industry. Ind Manage Data Syst 117(10):2263–2286
Kaihara T, Yao Y (2012) A new approach on cps-based scheduling and wip control in process industries. In: Proceedings of the 2012 Winter Simulation Conference (WSC), IEEE, pp 1–11
CSCMP (2013) Supply chain management. TERMS and GLOSSARY. Supply chain management terms and glossary, (August):1?222
Goetschalckx M, McGinnis L, Sharp G, Bodner D, Govindaraj T, Huang K (2002) Development of a design methodology for warehousing systems: hierarchical framework. p 1
de Koster R, Le-Duc T, Jan Roodbergen K (2007) Design and control of warehouse order picking: a literature review. Eur J Oper Res 182(2):481–501
Dallari F, Marchet G, Melacini M (2009) Design of order picking system. Int J Adv Manuf Technol 42 (1-2):1–12
Connolly C (2008) Warehouse management technologies. Sens Rev 28(2):108–114
Lagorio A, Pinto R, Golini R (2016) Research in urban logistics: a systematic literature review. Int J Phys Distr Log Manage 46(10):908–931
Govindan K, Soleimani H, Kannan D (2015) Reverse logistics and closed-loop supply chain: a comprehensive review to explore the future. Eur J Oper Res 240(3):603–626
Ulutas BH, Attila Islier A (2009) A clonal selection algorithm for dynamic facility layout problems. J Manuf Syst 28(4):123–131
Accorsi R, Manzini R, Maranesi F (2014) A decision-support system for the design and management of warehousing systems. Comput Ind 65(1):175–186
Nestinger SS, Bo C, Cheng HH (2010) A mobile agent-based framework for flexible automation systems. Ieee/Asme Trans Mech 15(6):942–951
Bottin M, Boschetti G, Rosati G (2018) A novel collision avoidance method for serial robots
Boschetti G (2016) A picking strategy for circular conveyor tracking. Journal of Intelligent and Robotic Systems: Theory and Applications 81(2):241–255
Castello E, Yamamoto T, Libera FD, Liu W, Winfield AFT, Nakamura Y, Ishiguro H (2016) Adaptive foraging for simulated and real robotic swarms: the dynamical response threshold approach. Swarm Intelligence 10(1):1–31
Kuan-Yu H, Chang T-S (2010) An innovative automated storage and retrieval system for b2c e-commerce logistics. Int J Adv Manuf Tech 48(1-4):297–305
Jiang Cao J, Li Y (2009) An intelligent control system for digital workshop production. Appl Mech Mater 16-19:75–83
Chetouane F (2015) An overview on rfid technology instruction and application. IFAC-PapersOnLine 48 (3):382–387
Wang M, Guo L, Zhang Y, Liang X (2015) A method of mobile robotic drilling trajectory planning for large-scale components. In: ASME 2015 International Mechanical Engineering Congress and Exposition, American Society of Mechanical Engineers, pp v02BT02a064–v02BT02a064
Kuo R-J, Tseng WL, Tien FC, Warren Liao T (2012) Application of an artificial immune system-based fuzzy neural network to a rfid-based positioning system. Comput Ind Eng 63(4):943–956
Granlund A, Wiktorsson M (2014) Automation in internal logistics: strategic and operational challenges. Int J Logist Syst Manag 18(4):538–558
Zhang Z, Guo Q, Chen J, Yuan P (2018) Collision-free route planning for multiple agvs in an automated warehouse based on collision classification. IEEE Access 6:26022–26035
Draganjac I, Miklić D, Kovačić Z, Vasiljević G, Bogdan S (2016) Decentralized control of multi-agv systems in autonomous warehousing applications. IEEE Trans Autom Sci Eng 13(4):1433–1447
Naveen SK, Rajesh KD, Pal Pandian P (2014) . Design and fabrication of flexible three link manipulator for pick and place application 592:2134–2138
Quintero C, Kariv I (2009) Design and implementation of an automated compound management system in support of lead optimization. J Biomol Screen 14(5):499–508
Biglarbegian M, Melek WW, Mendel JM (2011) Design of novel interval type-2 fuzzy controllers for modular and reconfigurable robots: theory and experiments. IEEE Trans Ind Electron 58(4):1371–1384
Han L, Mao H, Kumi F, Hu J (2018) Development of a multi-task robotic transplanting workcell for greenhouse seedlings
Bi ZM, Lang SYT, Verner M, Orban P (2008) Development of reconfigurable machines. Int J Adv Manuf Technol 39(11-12):1227–1251
Joseph OA, Sridharan R (2012) Effects of flexibility and scheduling decisions on the performance of an fms: simulation modelling and analysis. Int J Prod Res 50(7):2058–2078
Kootbally Z, Schlenoff C, Antonishek B, Proctor F, Kramer T, Harrison W, Downs A, Gupta S (2018) Enabling robot agility in manufacturing kitting applications. Integrated Computer-Aided Engineering, (Preprint), pp 1–20
Giusti A, Zeestraten MJA, Icer E, Pereira A, Caldwell DG, Calinon S, Althoff M (2018) Flexible automation driven by demonstration: leveraging strategies that simplify robotics. IEEE Robot Autom Mag 25(2):18–27
Iwasaki Y, Suzuki I, Yamamoto M, Furukawa M (2013) Job-shop scheduling approach to order-picking problem. Transactions of the Institute of Systems, Control and Information Engineers 26(3):103–109
Savino MM, Mazza A (2015) Kanban-driven parts feeding within a semi-automated o-shaped assembly line: a case study in the automotive industry. Assem Autom 35(1):3–15
Faccio M, Gamberi M, Bortolini M, Pilati F (2018) Macro and micro-logistic aspects in defining the parts-feeding policy in mixed-model assembly systems. International Journal of Services and Operations Management 31(4):433–462
Huang M, Guo Q, Liu J, Huang X (2018) Mixed model assembly line scheduling approach to order picking problem in online supermarkets. Sustainability 10(11):3931
Finetto C, Faccio M, Rosati G, Rossi A (2014) Mixed-model sequencing optimization for an automated single-station fully flexible assembly system (f-fas). Int J Adv Manuf Tech 70(5-8):797–812
Gao L, Thomas DJ, Freimer MB (2014) Optimal inventory control with retail pre-packs. Prod Oper Manag 23(10):1761–1778
Manzini R, Accorsi R, Baruffaldi G, Santi D, Tufano A (2018) Performance assessment in order picking systems: a visual double cross-analysis. The International Journal of Advanced Manufacturing Technology, pp 1–12
Bi ZM, Lang SYT, Shen W, Wang L (2008) Reconfigurable manufacturing systems: the state of the art. Int J Prod Res 46(4):967–992
Zhong RY, QY Dai TQ, Hu GJ, Huang GQ (2013) Rfid-enabled real-time manufacturing execution system for mass-customization production. Robot Comput Integr Manuf 29(2):283–292
Mejjaouli S, Babiceanu RF (2015) Rfid-wireless sensor networks integration: decision models and optimization of logistics systems operations. J Manuf Syst 35:234–245
Dharmara K, Monfared RP, Ogun PS, Jackson MR (2018) Robotic assembly of threaded fasteners in a non-structured environment. Int J Adv Manuf Tech 98(5-8):2093–2107
Radi M, Reiter A, Zaidan S, Reinhart G, Nitsch V, Färber B (2010) Telepresence in industrial applications: implementation issues for assembly tasks. Presence: Teleoperators and Virtual Environments 19(5):415–429
Derby S, Eckert G, Brown D, McFadden J (2013) The compact flowbot: a robotic pick and place motion system (patent pending). Ind Robot: An Int J 40(2):106–110
Bauernhansl T, Hartleif S, Felix T (2018) The digital shadow of production–a concept for the effective and efficient information supply in dynamic industrial environments. Procedia CIRP 72:69–74
Weeks K, Guiffrida A, Safa M (2016) The efficacy of routing and flexibility on financial performance within an international manufacturing setting. Int J Res Dev 7(1):63–83
Liu C-H, Chiu C-H, Chen T-L, Pai T-Y, Hsu M-C, Chen Y (2018) Topology optimization and prototype of a three-dimensional printed compliant finger for grasping vulnerable objects with size and shape variations. J Mech Robot 10(4):044502
Huo Y, Blaber J, Damon SM, Boyd BD, Bao S, Parvathaneni P, Noguera CB, Chaganti S, Nath V, Greer JM, Lyu I, French WR, Newton AT, Rogers BP, Landman BA (2018) Towards portable large-scale image processing with high-performance computing. J Digit Imaging
Hilmola O-P, Tolli A (2016) Warehouse layout implications on picking distance: case of human factor. World Review of Intermodal Transportation Research, 6(1)
Ogun PS, Usman Z, Dharmaraj K, Jackson MR (2015) 3d vision assisted flexible robotic assembly of machine components. In: Eighth international conference on machine vision (ICMV 2015), volume 9875, page 98751o. International society for optics and photonics
Sam R, Buniyamin N (2012) A bernoulli principle based flexible handling device for automation of food manufacturing processes. pp 214–219
Huang P-C, Mok AK (2018) A case study of cyber-physical system design autonomous pick-and-place robot. In: 2018 IEEE 24Th International Conference on Embedded and Real-time Computing Systems and Applications (RTCSA), IEEE, pp 22–31
Hildebrandt A-c, Schuetz C, Wahrmann D, Wittmann R, Rixen D (2017) A Flexible Robotic Framework for Autonomous Manufacturing Processes : Report from the European Robotics Challenge Stage 1, pp 53–59
Vittor T, Staab H, Breisch S, Soetebier S, Stahl T, Hackbarth A, Kock S (2011) A flexible robotic gripper for automation of assembly tasks: a technology study on a gripper for operation in shared human environments. pp 1–6
Estévez E, Pérez F, Orive D, Marcos M (2017) A novel approach for flexible automation production systems. pp 695–699
Xiao-Long W, Chun-Fu W, Li G-D, Qing-Xie C (2017) A robot navigation method based on rfid and qr code in the warehouse. In: 2017 Chinese Automation Congress (CAC), IEEE, pp 7837–7840
Merkumians MM, Baierling M, Schitter G (2016) A service-oriented domain specific language programming approach for batch processes. pp 1–9
Hedberg T, Helu M, Sprock T (2018) A standards and technology roadmap for scalable distributed manufacturing systems. In: ASME 2018 13Th International Manufacturing Science and Engineering Conference, American Society of Mechanical Engineers, pp v003t02a019–v003t02a019
Hansen K, Pedersen J, Sølund T, Aanæs H, Kraft D (2014) A structured light scanner for hyper flexible industrial automation. In: 2014 2Nd International Conference on 3d Vision, vol 1, IEEE, pp 401–408
Tavares P, Sousa A (2015) Flexible pick and place architecture using ros framework. In: 2015 10Th Iberian Conference on Information Systems and Technologies (CISTI), IEEE, pp 1–6
Neugschwandtner G, Reekmans M, van der Linden D (2013) An open automation architecture for flexible manufacturing. pp 1–5
Choi S, Zhang G, Fuhlbrigge T, Watson T, Tallian R (2013) Applications and requirements of industrial robots in meat processing. pp 1107–1112
Basile F, Chiacchio P, Coppola J, systems DG (2015) Automated warehouse a cyber-physical system perspective. In: 2015 IEEE 20Th Conference on Emerging Technologies & Factory Automation (ETFA), IEEE, pp 1–4
Elango M, Nachiappan SP (2011) Balancing multi-robot prioritized task allocation a simulation approach. In: 2011 IEEE International Conference on Industrial Engineering and Engineering Management, IEEE, pp 1725–1729
Rosati G, Faccio M, Carli A, Rossi A (2011) Convenience analysis and validation of a fully flexible assembly system. In: ETFA2011, IEEE, pp 1–8
Patil S, Vyatkin V, Pang C (2015) Counterexample-guided simulation framework for formal verification of flexible automation systems. In: 2015 IEEE 13Th International Conference on Industrial Informatics (INDIN), IEEE, pp 1192–1197
Park JY, Moon H (2012) Design and control of 2 degree-of-freedom air jet array for manipulating flat objects. pp 467–468
Sam R, Nefti S (2008) Design and development of flexible robotic gripper for handling food products. In: 2008 10Th International Conference on Control, Automation, Robotics and Vision, IEEE, pp 1684–1689
Ribeiro T, Garcia I, Pereira D, Ribeiro J, Lopes G, Ribeiro AF (2017) Development of a prototype robot for transportation within industrial environments. pp 192–197
Kobata T, Tada Y, Muromaki T (2016) Development of automatic parcel delivery system using image processing techniques. pp 292–295
Ferreira EP, Miranda VM (2011) Development of static neural networks as full predictors or controllers for multi-articulated mobile robots in backward movements-new models and tools. In: 2011 9th IEEE International Conference on Control and Automation (ICCA), IEEE, pp 985–990
Chou T-S, Chang S-Y, Lu Y-F, Wang Y-C, Ouyang MK, Shih C-S, Kuo T-W, Hu JS, Liu JW-S (2009) Emwf for flexible automation and assistive devices. In 2009 15th IEEE Real-Time and Embedded Technology and Applications Symposium, IEEE, pp 243–252
Effenberger I, Kühnle J, Verl A (2013) . Fast and flexible 3d object recognition solutions for machine vision applications 8661:86610N
Soetebier S, Muller C, Mauser N, Kock S, Legeleux F (2008) Flexible automation for automotive body assembly. In: 2008 IEEE International Conference on Automation Science and Engineering, IEEE, pp 341–346
Hata S, Hiroyasu T, Hayash J, Hojoh H, Hamada T (2009) Flexible handling robot system for cloth. In: 2009 International Conference on Mechatronics and Automation, IEEE, pp 49–54
Holzmuller-Laue S, Rimane K, Neubert S, Kreuzfeld S, Arndt D, Gode B, Thurow K, Stoll R (2008) Flexible r&d integration platform of process informatics for automated medical applications and mobile data acquisition. pp 621–626
Chu X, Roddelkopf T, Fleischer H, Stoll N, Klos M, Thurow K (2016) Flexible robot platform for sample preparation automation with a user-friendly interface. In: 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), IEEE, pp 2033–2038
Zaepernick N (2013) From rapid prototyping to emanufacturing. pp 176–180
Frischkorn F, Miesner J, Glass S (2008) . Full automatic packaging of a hybrid transceiver module 6899:2–6
Angerer S, Strassmair C, Staehr M, Roettenbacher M, Robertson NM (2012) Give me a hand—the potential of mobile assistive robots in automotive logistics and assembly applications. pp 111–116
Koppensteiner G, Schwingenschlögl C, Merdan M, Zoitl A (2012) Implementation of an event-based low-level control for mobile robots. pp 135–140
Rane AB, Sudhakar DSS, Rane S, et al. (2015) Improving the performance of assembly line: review with case study. In: 2015 International Conference on Nascent Technologies in the Engineering Field (ICNTE), IEEE, pp 1–14
Franke J, Hofmann B, Tremel J, Meyer A (2015) Innovative methods for automated assembly and fixation of permanent magnets in electrical machines. Procedia CIRP 26:724–728
Adeyeri MK, Mpofu K, Olukorede TA (2015) Integration of agent technology into manufacturing enterprise: a review and platform for industry 4.0., pp 1–10
Pedersen Mikkel R, Herzog Dennis L, Krüger V (2014) Intuitive skill-level programming of industrial handling tasks on a mobile manipulator. In: 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, IEEE, pp 4523–4530
Syberfeldt A, Ayani M, Holm M, Wang L, Lindgren-Brewster R (2016) Localizing operators in the smart factory: a review of existing techniques and systems. In: 2016 International Symposium on Flexible Automation (ISFA), IEEE, pp 179– 185
Lenz C, Knoll A (2014) Mechanisms and capabilities for human robot collaboration. In: The 23rd IEEE International Symposium on Robot and Human Interactive Communication, IEEE, pp 666–671
Mazzolini M, Brusaferri A, Carpanzano E (2010) Model-checking based verification approach for advanced industrial automation solutions. In: 2010 IEEE 15Th Conference on Emerging Technologies & Factory Automation (ETFA 2010), IEEE, pp 1–8
Schmitt R, Pfeifer T, Pavim A, Stemmer M, Hübner J, Roloff M (2011) Multiagent-based approach for the automation and quality assurance of the small series production. In: ETFA2011, IEEE, pp 1–8
Kang S, Kim K (2017) Multiple concurrent operations and flexible robotic picking for manufacturing process environments. In: 2017 14Th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), IEEE, pp 380–381
Akan B, Çürüklü B, Spampinato G, Asplund L (2009) Object selection using a spatial language for flexible assembly. In: 2009 IEEE Conference on Emerging Technologies & Factory Automation, IEEE, pp 1–6
Zoitl A, Strasser T, Valentini A (2010) Open source initiatives as basis for the establishment of new technologies in industrial automation: 4diac a case study. In: 2010 IEEE International Symposium on Industrial Electronics, IEEE, pp 3817–3819
Pesic J, Morea A (2015) Operating a network close to the “zero margin” regime thanks to elastic devices. In: 2015 17Th International Conference on Transparent Optical Networks (ICTON), IEEE, pp 1–1
Zhao J, Ding Y, Tian C, Hao C, Meng L (2017) Path planning of the omni-directional mobile vehicle in warehouse environment. In: 2017 Chinese Automation Congress (CAC), IEEE, pp 4147–4152
Caridá VF, Morandin O, Cerioni PR, Tuma CCM (2014) Prediction model using coverability tree from a modeling in petri nets applied in agvs dispatching. In: Brazilian Conference on Intelligent Systems, IEEE, pp 140–145
Holfeld B, Wieruch D, Raschkowski L, Wirth T, Pallasch C, Herfs W, Brecher C (2016) Radio channel characterization at 5.85 ghz for wireless m2m communication of industrial robots. In: 2016 IEEE Wireless Communications and Networking Conference, IEEE, pp 1–7
Fan Y, Te T, Lin H-C, Zhao Y, Tomizuka M (2017) Real-time robust finger gaits planning under object shape and dynamics uncertainties. In: 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, pp 1267–1273
Popescu D, Ionete C, Aguridan R, Popescu L, Meng Q, Ionete AA (2009) Remote vs. simulated, virtual or real-time automation laboratory. In: 2009 IEEE International Conference on Automation and Logistics, IEEE, pp 1410–1415
Chun-Fu W, Xiao-Long W, Qing-Xie C, Xiao-Wei C, Li Guo-Dong (2017) Research on visual navigation algorithm of agv used in the small agile warehouse. In: 2017 Chinese Automation Congress (CAC), IEEE, pp 217–222
Jost J, Kirks T, Gupta P, Lunsch D, Stenzel J (2018) Safe human-robot-interaction in highly flexible warehouses using augmented reality and heterogenous fleet management system. In: IEEE International Conference on Intelligence and Safety for Robotics, pp 256–260
Moser T, Biffl S (2012) Semantic integration of software and systems engineering environments. IEEE Transactions on Systems, Man, and cybernetics, Part C (Applications and Reviews) 42(1):38–50
Dose S, Dillmann R (2012) Shop floor based programming of assembly assistants for industrial pick-and-place applications. In: 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, IEEE, pp 4966–4971
Wirabhuana A, Haron H, Imtihan MR (2008) Simulation and re-engineering of truck assembly line. In: 2008 Second Asia International Conference on Modelling & Simulation (AMS), IEEE, pp 783–787
Kuehl A, Furlan S, Gutmann J, Meyer M, Franke J (2017) In: 2017 IEEE International Electric Machines and Drives Conference (IEMDC), IEEE, pp 1–6
Jasper D, Edeler C, Diederichs C, Naroska M, Stolle C, Fatikow S (2009) Towards automated robotic nanomanipulation systems. In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics
Hjorth TJ, Gupta P, Balasubramanian A (2016) University implements distribution automation to enhance system reliability and optimize operations. In: 2016 69Th Annual Conference for Protective Relay Engineers (CPRE), IEEE, pp 1–8
Nerakae P, Uangpairoj P, Chamniprasart K (2016) Using machine vision for flexible automatic assembly system. Procedia Comput Sci 96:428–435
Ciubucciu G, Solea R, Filipescu A, Filipescu A (2017) . Visual servoing and obstacle avoidance method based control autonomous robotic systems servicing a mechatronics manufacturing line 2:874–879
Zheng H, Chen L, Zhao X, Liu Z (2016) Design of control system for flexible packaging bags palletizing production line based on plc. In: Mechanical Engineering and Control Systems: Proceedings of 2015 International Conference on Mechanical Engineering and Control Systems (MECS2015), pp 206– 209
Tompkins JA, White JA, Bozer YA, Tanchoco JMA (2010) Facilities planning. John Wiley & Sons
Groover MP (2011) Automação industrial e sistemas de manufatura. Pearson Education do Brasil
Manzini R, Gamberi M, Regattieri A (2006) Design and control of an AS/RS. Int J Adv Manuf Technol 28(7-8):766–774
Shivanand HK, Benal MM, Koti V (2006) Flexible Manufacturing system, volume 91. New Age International
Acknowledgements
This study received financial support from the Brazilian funding agency FAPEG.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Custodio, L., Machado, R. Flexible automated warehouse: a literature review and an innovative framework. Int J Adv Manuf Technol 106, 533–558 (2020). https://doi.org/10.1007/s00170-019-04588-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-019-04588-z