
Abstract
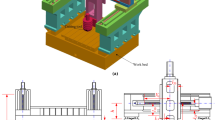
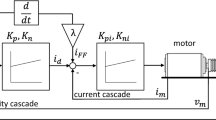
A dual stage feed drive system is well suited to satisfying current demands of high performance machining with tight position control under high feed rates in the presence of disturbances. It does this by integrating an actuator with high position resolution and fast response together with a conventional linear drive. A magnetostrictive actuator (MA) with a bandwidth in the kHz range capable of several kN of force output is an ideal candidate for use as the fine positioning element in such a dual stage system. However, MAs display significant hysteresis in their performance. This makes the effective implementation of real-time fast servo control challenging. In this paper, a dynamic Preisach model is utilized to reduce the undesired nonlinearity. A sliding mode controller (SMC) is designed to deal with uncertainties such as the Preisach modeling error as well as external disturbances so as to ensure a robust stable system. Experimental results show the servo performance improvement during a feed step test for single axis control and a single axis component of a sharp path interpolation test.
Article PDF
Similar content being viewed by others

Avoid common mistakes on your manuscript.
References
Schulz H, Moriwaki T (1992) High-speed machining. CIRP Ann 41/2:637–643
Pritschow G, Philipp W (1990) Direct drives for high- dynamic machine tool axes. CIRP Ann 39/1:413–415
Pritschow G, Philipp W (1992) Research on the efficiency of feed forward controllers in direct drives. CIRP Ann 41/1:411–415
Pritschow G (1998) A comparison of linear and conventional electromechanical drives. CIRP Ann 47/2:541–548
Weck M (1999) Components of HSC-Machine. 2nd international conference on high speed machining. Darmstadt, Germany
Koren Y, Lo CC (1992) Advanced controller for feed drive. CIRP Ann 41/2:689–698
Alter DM, Tsao T (1994) Stability of turning process with actively controlled linear motor feed drives. Trans ASME 116:298–306
Mayergoyz ID (1991) Mathematical models of hysteresis. Springer, Berlin Heidelberg New York
Hughes D, Wen J (1994) Preisach modeling and compensation for smart material hysteresis. SPIE Active Mater. Smart Struct 2427:50–64
Natale C, Velardi F, Visone C (2001) Modeling and compensation of hysteresis for magnetostrictive actuators. Proc IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp 744–749
Venkataraman R, Krishnaprasad PS (2000) Approximate inversion of hysteresis: theory and numerical results. Proc 39th IEEE Conference on Decision and Control, pp 4448–4454
Tong D, Veldhuis SC, Elbestawi MA (2006) Control of a dual stage magnetostrictive actuator and linear motor feed drive system. CIRP 2nd International Conference on High Performance Cutting, Vancouver, Canada
Hirano T, Fan LS (1998) High-bandwidth high accuracy rotary microactuators for magnetic hard disk drive tracking servo. IEEE/ASME Trans Mechatron l.3:156–165
Schroceck SJ, Messner WC (2001) On compensator design for linear time-invariant dual-input single-output systems. IEEE/ASME Trans Mechatron l.6(1):50–57
Altintas Y, Erkorkmaz K, Zhu W (2000) Sliding mode controller design for high speed feed drives. CIRP Ann 49(1):265–270
Slotine JJE, Li W (1991) Applied nonlinear control. Prentice-Hall, Englewood Cliffs, NJ
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Tong, D., Veldhuis, S.C. & Elbestawi, M.A. Control of a dual stage magnetostrictive actuator and linear motor feed drive system. Int J Adv Manuf Technol 33, 379–388 (2007). https://doi.org/10.1007/s00170-006-0769-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-006-0769-y