
Abstract
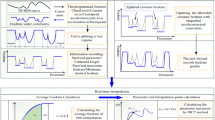
The interpolator is the key part of a CNC system, which has strong effect on machining accuracy, tool motion smoothness, and machining efficiency. In this paper, a real-time adaptive interpolator is developed for non-uniform rational B-spline curves (NURBS) interpolation while considering the maximum acceleration/deceleration of the machine tool. In this proposed interpolator, both constant feedrate and high accuracy are achieved while the inconsistency of feedrate is dramatically reduced as well. In order to deal with the acceleration/deceleration around the feedrate-sensitive sharp corners, a look-ahead function is introduced to detect and adjust the feedrate adaptively. Furthermore, a parameter compensation scheme is proposed to eliminate the parametric truncation error which has been analyzed by several researchers but still not incorporated into any real-time interpolator so far. A case study was conducted to evaluate the feasibility of the developed interpolator.
Article PDF
Similar content being viewed by others


Avoid common mistakes on your manuscript.
References
Koren Y (1997) Control of machine tools. ASME Trans J Manuf Sci Eng 119:749–755
Koren Y, Lo CC, Shpitalni M (1993) CNC interpolators: algorithm and analysis. ASME Winter Annual Meeting PED 64:83–92
Hwang J (1992) Interference-free tool-path generation in the NC machining of parametric compound surfaces. CAD 24:667–677
Kawabe S, Kimura F, Sata T (1981) Generation of NC commands for sculptured surface machining from three-coordinate measuring data. CIRP Ann 30:369–372
Bedi S, Ali I, Quan N (1993) Advanced interpolation techniques for CNC machines. ASME J Eng Ind 115:329–336
Huang JT, Yang DCH (1992) A generalized interpolator for command generation of parametric curves in computer controlled machines. Japan/USA Symposium on Flexible Automation 1:393–399
Shpitalni M, Koren Y, Lo CC (1994) Real-time curve interpolators. CAD 26(11):832–838
Yang DCH, Kong T (1994) Parametric interpolator versus linear interpolator for precision surface machining. CAD 26(3):225–234
Yeh S, Hsu P (1999) The speed-controlled interpolator for machining parametric curves. CAD 31:349–357
Yeh S, Hsu P (2002) Adaptive-feedrate interpolation for parametric curves with a confined chord error. CAD 34:229–237
Yong T, Narayanaswami R (2003) A parametric interpolator with confined chord errors, acceleration and deceleration for NC machining. CAD 35:1249–1259
Zhang Qiyi G, Greenway RB (1998) Development and implementation of a NURBS curve motion interpolator. Robot Comput-Integr Manuf 14:27–36
Erkorkmaz K, Altintas Y (2001) High-speed CNC system design. Part I.Jerk-limited trajectory generation and quintic spline interpolation. Int J Adv Manuf Technol 41:1323–1345
Nam S, Yang M (2004) A study on a generalized parametric interpolator with real-time jerk-limited acceleration. CAD 36:27–36
Tsai YF, Farouki RT, Feldman B (2001) Performance analysis of CNC interpolators for time-dependent feedrates along PH curves. Comput-Aid Geom Des 18:245–265
Zhiming X, Jincheng C, Zhengjin F (2002) Performance evaluation of a realtime interpolation algorithm for NURBS curves. Int J Adv Manuf Technol 20:270–276
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Yan, C., Du, D. & Li, C. Design of a real-time adaptive interpolator with parameter compensation. Int J Adv Manuf Technol 35, 169–178 (2007). https://doi.org/10.1007/s00170-006-0692-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-006-0692-2