
Abstract
This paper presents Foster I and Foster II realizations of fractors using RC ladders while meeting five different specifications together, i.e., exponent, coefficients, upper and lower limits of constant phase zone, and phase band. The work mainly focusses on achieving the specified phase band to circumvent the present limitation of state-of-the-art. A comparison among the proposed algorithm and existing algorithms of fractor realization highlights the benefits of the proposed one. Furthermore, effects of tolerance limits of resistances (R) and capacitances (C) on the values of the fractor parameters are studied via Monte Carlo simulation using PSpice. Based on that, it develops suitable algorithm to choose R and C elements in practice. A set of experimental results are presented at the end to substantiate the presented guidelines and simulation results.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Practical application of fractional order (FO) calculus is now an emerging research topic in electrical engineering [18]. Several generalized theorems [27, 33, 36,37,38,39] are developed in the last few years vis-a-vis FO controller [15, 17, 34, 41, 48] and FO circuits [1, 2, 10, 20, 24, 28, 44, 45, 47]. The research in FO domain has unraveled many unique features which are absent in the conventional integer-order systems. For example, a typical FO resonator possesses infinite Q factor [6,7,8], FO oscillators can generate very high and low frequency signals [19, 35], and FO PLL shows broad capture range and less locking time [43]. However, the unavailability of fractor (FO element) in the market often poses a limitation to these studies [3]. Several research works are currently going on to fabricate fractors similar to the commercially available capacitors [4, 9, 11, 21, 23, 26, 42], but most of them are still at their nascent stage. The reported prototypes of such fractors are often found to suffer from unstable nature [30], voluminousness [4], or small constant phase zone [23].
In this scenario, researchers often follow an alternative approach [40], i.e., the realization of FO immittance by RC ladder circuits. The RC ladder requires a large number of resistors (R) and capacitors (C), but the advantage is that there are defined techniques to design the ladder circuits which can meet different fractor specifications [5, 12,13,14, 16, 22, 25, 29, 31, 46]. Such degrees of freedom yet not attained in the cases of the single-element type fractor fabrication. However, the realization of a fractor with all parameters specified is still a challenge. A typical fractor has four significant parameters—fractor’s order or exponent, fractance or coefficient, constant phase zone, and phase band [3]. For a better understanding of the rest of the paper, first, these four parameters are explained briefly.

Typical phase plots of an ideal fractor and practical fractor (for \(\alpha \) = 0.5)
Fractor is the elemental FO immittance whose impedance function \(Z_F (s)\) (in the Laplace domain) or \(Z_F (\omega )\) (in the frequency domain) is:
Here, \(\alpha \) is the order or exponent of the fractor; it is a fractional number. F is the coefficient of the fractor, which is named as fractance. Unit of fractance is \(\mho \)s\(^\alpha \). A detail analysis on the unit of fractance is discussed in [3]. We see that the fractor possesses a constant phase nature at \(-\,\frac{\alpha \pi }{2}\) radian or \({-}\,90^\circ \alpha \). Thus, it is also called a constant phase element. Ideally, this constant phase nature is for infinite frequency range, and it results in a horizontal straight line in the phase plot, but in the case of a practically realized fractor, it is confined only to a limited zone (\(f_\mathrm{l}\), \(f_\mathrm{u}\)) viz. Fig. 1. This zone is called constant phase zone (CPZ).
Even, within this CPZ, the phase is not exactly constant; instead, the phase plot oscillates within a band, as shown in Fig. 1. The amplitude of this band is named here as the phase band (PB). Therefore, one may say, practical fractors have at least five defining parameters: \(\alpha \) (exponent), F (coefficient), CPZ limits, and PB. Design of a ladder fractor can be said complete if all these parameters’ values can be controlled by that design.
The earliest techniques on ladder fractor design mainly focussed on the realization of a typical \(\alpha \) value. Carlson’s method [12] and DuttaRoy’s method [16] can be mentioned in this context [12, 16]. Later, new guidelines were proposed by Oldham et al. [31] and Oustaloup [32] to include the CPZ limits. The fractance value was introduced in the design first by Charef et al. [13] and later, by Adhikary et al. [5]. In 2013, for the first time, Valsa and Vlach proposed guidelines involving the phase band as one of the specifications [46]. Still, none of these guidelines takes into account all five specifications together (viz. Table 1).
In this paper, we look into this issue and propose a set of guidelines which can meet all these specifications. The proposed guidelines are based on the guidelines already reported in [5], which took into account all but PB. So, here we first investigate how the phase band can be controlled from the design stage (Sect. 2), and based on that, modified guidelines are proposed (Sect. 3). Initially, the guidelines were reported for Foster I structure [5]. Here, it is extended to Foster II structure also. A comparison between proposed and existing guidelines with different case studies is given in Sect. 4. Spice-based Monte Carlo analysis and practical results are presented in Sect. 5. The paper concludes in Sect. 6.
2 Variation of Phase Band in a Ladder-Based Fractor
The phase band (PB) is defined as the amplitude of phase variation within the CPZ limits. If within the CPZ limits (\(f_\mathrm{l}\), \(f_\mathrm{u}\)), the maximum phase is \(\theta _{\text {max}}\), and the minimum phase is \(\theta _{\text {min}}\), then the PB is defined as:

Truncated RC ladder structure (modified Foster I) for realizing FO immittances
To study the variation of PB with ladder configuration, a modified Foster I structure (Fig. 2) is adopted here as per [5]. The structure contains N+2 number of parallel RC blocks and a single resistor, connected in series and indexed as 0, 1, 2 \(\ldots \)N+2. In the intermediate blocks, values of consecutive resistors and capacitors are in simple geometric progression:
where
Whereas, the R and C values of the terminal blocks are modified as follows to imitate the effects of the truncated parts on either side of the ladder circuit.
Therefore, the ladder design involves the evaluation of five design variables: N, a, b, R, and C. The design guidelines, described in [5], deduce these variables from the given specifications of \(\alpha \), F, CPZ lower limit (\(f_\mathrm{l}\)), and upper limit (\(f_\mathrm{u}\)). Based on those values, the ladder resistors and capacitors are selected as per Eqs. (3)–(9). Nevertheless, the reported guidelines do not consider any specification on the phase band (PB). The ladder fractors, realized by this technique, showed different PB values for different \(\alpha \) and could not be set from the design level [5]. So, first, one needs to find out which of these design variables bear a direct correlation with PB and how PB depends on \(\alpha \).
2.1 PB is Correlated with the Design Variable b
Theoretically, an infinite number of RC blocks whose characteristic frequencies (\(f_\mathrm{c}\)) are dispersed over the frequency axis at the infinitesimal interval results in an ideal FO immittance [12]. The magnitude versus frequency plot of such ideal fractor gives a straight line whose gradient is \({-}\,20\alpha \) dB/decade, viz. Fig. 3. However, one can not have an infinite number of RC blocks in practice, neither their characteristic frequencies are infinitesimal interval apart. In practice, there is a finite difference between the \(f_\mathrm{c}\) of two consecutive RC blocks which manifests in a staircase-type magnitude response as well as an oscillatory phase response, viz. Fig. 3.

Effect of closeness of characteristic frequencies (\(f_\mathrm{c}\)) on the phase band (PB)
It is, thus, evident that less is the difference between two consecutive \(f_\mathrm{c}\), smaller is the staircases, smaller is the PB. However, the closer is the \(f_\mathrm{c}\), more is the required number of blocks to achieve the desired CPZ. Therefore, one needs to identify the maximum allowable dispersion between the consecutive \(f_\mathrm{c}\) to have the specified PB. Now, the first two steps of the earlier reported guidelines (by Adhikary et al. [5]) were as follows:
Step 1: Choose a and b by following relations,
Step 2: Determine the fundamental time constant \(\tau _{0} = RC\) (the time constant of the \(0{\text {th}}\) block) from the specification of CPZ lower limit \(f_\mathrm{l}\), by:
Therefore, the time constant for the ith block is (\(i \le N\))
That means, the time constants of consecutive blocks are ab times than the previous one. Again, \(f_\mathrm{c} = \frac{1}{2\pi \tau }\); therefore, the characteristic frequencies of consecutive blocks are \(\frac{1}{ab}\) times apart. Moreover, \(a \approx b^{\frac{\alpha }{1-\alpha }}\) as per Eq. (11) \(\Rightarrow ab \approx b^{\frac{1}{1-\alpha }}\). So, hypothetically, it can be said that the PB, which depends on the separation between the \(f_\mathrm{c}\) of consecutive blocks, is a function of \(b^{-\frac{1}{1-\alpha }}\):
2.2 The Relation Between PB and the Design Variable b
To find out the relation between PB and x, where \(x = b^{-\frac{1}{1-\alpha }}\), several ladder fractors are designed as per the guidelines, given in [5] and simulated using the MATLAB 2017a. In this study, the F and the CPZ limits are kept constant while b and \(\alpha \) are varied. Next, for each combination, PB is determined directly from the simulated phase plot, and from that, a PB versus x plot is drawn for different \(\alpha \) (viz. Fig. 4a).
These PB versus x plots are found quite linear, and straight lines can be fitted through these plots using curve-fitting application of MATLAB 2017a (which uses least-square fitting). The goodness of fit (\(R^2\)) is found to be more than 0.995 (viz. Table 2). On a closer look to these fitted equations, an interesting fact is revealed. The fitted lines have almost same gradient for \(\alpha \)= 0.2 & 0.8; 0.3 & 0.7; and 0.4 & 0.6. It is apparent also in Fig. 4a. Moreover, the gradient values are close to \(\alpha (1-\alpha )\). Now, if the PB versus x curves are fitted to the lines whose gradients are \(\alpha (1-\alpha )\), corresponding offset terms become approximately equal to \({-}\,2(1-\alpha )\alpha ^{\frac{2}{3}}\). Based on these observations, we here propose the following empirical relationship between PB and b value,

The PB versus \(b^{-\frac{1}{1-\alpha }}\) plots: a as obtained from the phase plot, simulated in MATLAB, b as estimated by the proposed relationship, given in Eq. (15)
In support of this proposed relation, PB versus \(\alpha \) is plotted as per Eq. (15) in Fig. 4b, and those plots are compared with the actual PB plots, given in Fig. 4a. We see that they match each other closely. The \(R^2\) value and RMSE, when the actual PB data are fitted to the proposed relationship, are given in Table 2. A graphical comparison between actual PB and assessed PB as per Eq. (15) is shown in Fig. 5. Next, according to the relationship of Eq. (15), the earlier-reported guidelines are modified, and a new set of guidelines are presented in the next section.

PB versus \(\alpha \) for different b: Comparison between actual PB as found from MATLAB phase plots and the PB values as estimated by proposed Eq. (15)
3 Guidelines for Fractor Design: With Specified \(\alpha \), F, \(f_\mathrm{l}\), \(f_\mathrm{u}\), and PB
3.1 For Modified Foster I Structure
The following guidelines are for the modified Foster I structure, shown in Fig. 2 and described in Sect. 2.
Step 1: Choice of the geometric ratios: a and b
The choice of a and b is governed by the specifications of \(\alpha \) and PB (in degree),
Step 2: Choice of the fundamental time constant, \(\varvec{\tau }_0\) The fundamental time constant \(\tau _{0} = RC\) is basically the time constant of the \({0}^{\text {th}}\) block and is evaluated as per the specification of CPZ lower limit \({f}_\mathrm{l}\).
Step 3: Choice of the number of blocks (\(\varvec{N}\)) Next, CPZ upper limit \(f_\mathrm{h}\) determines the value of N.
Step 4: Evaluation of the constant terms \(\varvec{R}\) & \(\varvec{C}\) Now, as per the expressions for resistor and capacitor of each block, mentioned in Sect. 2, the overall impedance of the RC ladder circuit (Fig. 2) is,
where \(p = ab\) and,
The truncated ladder approximates a fractor within the CPZ; thus, comparing the ladder impedance with the impedance of an ideal fractor, we get,
Here, \(\omega _\mathrm{C}\) is the geometric mean frequency of the specified CPZ, i.e., \(\omega _\mathrm{C} = 2\pi \sqrt{f_\mathrm{l}f_\mathrm{h}}\). The geometric mean frequency has been chosen to minimize the effect of the truncated terminal blocks. Once R is evaluated, capacitance constant C is found from Eq. (17) by putting \(C = \tau _0/R\).
Step 5: Evaluation of R, C of individual blocks
Now, a, b, N, R, and C, all are known; one can find out the values of the resistors and capacitors of the ladder circuit of Fig. 2 following Eqs. (3)–(9) and can realize a particular fractor for the given values of F, \(\alpha \)\((0<\alpha <1)\), CPZ (\(f_\mathrm{l}\) and \(f_\mathrm{h}\)), and PB.
3.2 For Modified Foster II Structure
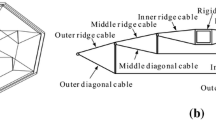
The above guidelines can also be extended for a modified Foster II-type ladder structure. The suitable structure is depicted in Fig. 6 with necessary description. Here also the design variables are same: a, b, N, R, and C. Although, this time, a is the geometric progression ratio for capacitors and b is for resistors.
The guidelines for Foster II structure can be derived directly from those for Foster I, by simply interchanging R and C terms and replacing \(\alpha \) by \(1{-}\alpha \). Therefore, the guidelines for Foster II realization are, in brief,

Truncated RC ladder structure (modified Foster II) for realizing FO immittances
Once a, b, N, R, and C are evaluated as per Eqs. (22)−(25), values of the resistors and capacitors are determined according to the description of Fig. 6.
4 Validation of Proposed Guidelines via MATLAB Simulations
In this section, first a typical design example with the proposed guidelines will be explained and then three case studies will be presented highlighting the contribution of this work.
Example
Design a ladder circuit for constant phase = \({-}\,45^\circ \), constant phase zone from 1 Hz to 1 MHz, fractance 1 \(\mu \)s\(^{0.5}\), and PB = \(2^\circ \).
Here, the design example is illustrated for Foster I structure (Fig. 2). As specified constant phase is \({-}\,45^\circ \), hence, required \(\alpha = \frac{-45}{-90} = 0.5\). Besides, required \(F = 1\times 10^{-6}\), \(f_\mathrm{l}\) = 1, \(f_\mathrm{u}\) = \(10^6\), and PB = 2\(^\circ \). Therefore,
\(\vartriangleright b = \left[ \frac{1}{0.5(0.5)}\left( 2 + 2\times 0.5\times 0.5^{\frac{2}{3}}\right) \right] ^{-0.5} =0.3083\) \(\cdots \ \) from Eq. (16)
\(\vartriangleright \ln (a) \approx \dfrac{0.5}{0.5} \ln (0.3083) \Rightarrow a = 0.3083\) \(\cdots \ \) from Eq. (16)
\(\vartriangleright \tau _0 = \left( \dfrac{111}{2\pi }\right) \dfrac{0.3083^2}{1} = 1.6793\) \(\cdots \ \) from Eq. (17)
\(\vartriangleright N + 1 \ge \dfrac{5.5 + \ln (10^6/1) - 3 (0.5)^{2/3}}{-\ln (0.3083\times 0.3083)} = 7.4 \Rightarrow N = 7\) \(\cdots \) from Eq. (18)
\(\vartriangleright \omega _\mathrm{c} = 2\pi \sqrt{f_\mathrm{l}f_\mathrm{u}} = 2000\pi \)
\(\vartriangleright k(j\omega _\mathrm{c}) = (9.55-j9.33)\times 10^{-3} \Rightarrow R \approx 251977 \text { and } C \approx 6.665\times 10^{-6} \)
\(\cdots \) from Eqs. (20)–(21).
Therefore,
Using the above-deduced values, the ladder fractor \(\hbox {LF}_1\) is designed and its magnitude and phase response are simulated in MATLAB 2017a (viz. Fig. 7a, b). From the phase plot, we see that the deviation in minimum and maximum phase, within 1 Hz to 1 MHz range, is 4.21\(^\circ \). Thus, the achieved PB is 2.11\(^\circ \). From the phase data, the average phase is found \({-}\,44.96^\circ \) which satisfy the CP specification. The simulated fractance value is obtained from the magnitude data, and it is found to be 3.87 \(\mu \)s\(^{0.5}\) (viz. Table 3). This design illustrates how all the specifications including \(\alpha \), F, CPZ limits, and PB can be achieved closely with the proposed guidelines.
4.1 Case Study I: Different PB for Same \(\alpha \), F, and CPZ

MATLAB simulated a phase and b magnitude plots for three ladder fractors, \(\hbox {LF}_1\), \(\hbox {LF}_2\), and \(\hbox {LF}_3\) (described in Table 3)

MATLAB simulated a phase and b magnitude plots of the fractors which are designed with different \(\alpha \) and F values with same PB (2.0\(^\circ \)) and CPZ (1 Hz to 1 MHz)
In this case study, two different RC ladder-based fractors \(\hbox {LF}_2\) and \(\hbox {LF}_3\) are designed whose \(\alpha \) (0.5), F (3.75\(\mu \mho \)s\(^{0.5}\)), and CPZ (1 Hz to 1 MHz) specifications are same as above-designed \(\hbox {LF}_1\), but the required PB is \(0.5^\circ \) and 1\(^\circ \), respectively. The fractors are designed by the proposed guidelines, and their MATLAB simulated impedance plots are given in Fig. 8a, b. Table 3 presents the desired specifications and the achieved values side-by-side.
This case study establishes that the PB can be adjusted using the proposed guidelines, keeping other parameters intact. It can be seen from Table 3, that to get smaller PB, b value needs to be increased, which increases N in turn. That means, to decrease PB, one needs more blocks. The RC ladder-based fractor design is, thus, a trade-off between the number of components (cost and size) and PB (performance). With presented modification, one can meet the trade-off as required.
4.2 Case Study II: Different \(\alpha \) and F for Same PB
In this case study, seven different fractors with different \(\alpha \) and F values are designed. However, each fractor is designed for the same CPZ (1 Hz to 1 MHz) and same PB value (2\(^\circ \)). The MATLAB simulated phase plots of the designed fractors are shown in Fig. 8a. This case study indicates that one can achieve the desired PB value for any value of \(\alpha \) or F.

MATLAB simulated phase plots for fractor \(\hbox {LF}_4\) (desired CP = \({-}\,\)36\(^\circ \), PB = 2\(^\circ \)), designed by different methods
4.3 Case Study III: Comparison with Other Ladder Design Techniques
In this study, the proposed technique is compared with other existing techniques of ladder realization. The comparison is carried out with Oustaloup method [32], Rational Algorithm [13, 14], Matsuda method [29], and Valsa guidelines [46]. In this case, the ladder fractor \(\hbox {LF}_4\) is designed for F = 1 \(\mu \)s\(^\alpha \), CPZ 1 to 1 MHz, PB = 2\(^\circ \), and \(\alpha \) = 0.4. The phase plots of the simulated fractors, designed by different algorithms, are shown in Fig. 9, and corresponding observations are noted in Table 4. Here, FOMCON and ninteger toolboxes are used to derive Oustaloup and Matsuda approximation.
First of all, Oustaloup, Matsuda, and Rational Algorithm do not consider any specification on phase band, whereas the proposed method includes phase band specifications in design. We also see that for the same number of RC blocks, the ladder fractor, which is designed by the proposed method, achieves the constant phase and PB specifications more accurately (viz. Table 4).
It is only the Valsa guidelines which also take care of PB specification, but unlike the presented method, it does not take into account the fractance specifications. Moreover, we see that the achieved PB is considerably higher than the desired value when designed by Valsa guidelines.
It can also be mentioned here, that the presented guidelines directly evaluate RC values, unlike the Oustaloup or Matsuda method, where transfer functions are derived at first. Hence, if proposed method is adopted, one need not realize and negative resistor.
These studies show the advantage of the proposed technique over the existing technique. The main limitation of the technique is that the derived R and C values do not exactly match with the commercially available values. To find out the impact of this deviation on practical circuits, Monte Carlo study is carried out next.
5 Monte Carlo Simulation and Practical Realization
So far, it is discussed how the proposed guideline can attain a desired PB value from the design stage. It is also seen that the proposed technique can achieve the desired specifications closer than the other existing methods (Table 4). However, the exact values of R and C as derived by the proposed guidelines, are not available in the market. In practice, one has to approximate those R and C values with the nearest available resistors or capacitors and that leads to a distortion in the impedance plots.

The algorithm to choose values of R and C for practical circuits as per the commercial availability
The practical choice of R and C depends on different factors, like, (i) the values of R and C which are available, (ii) the maximum number of R or C that can be connected in series or parallel in a particular block, (iii) the maximum number of series or parallel combinations that are allowed in the entire network. The R and C should be chosen in such a way that the practical time constant of each block should be close to its theoretical value. Based on this fact, a heuristic algorithm is proposed here to choose the R and C values in practice. The algorithm is described in the flowchart of Fig. 10. Following are the descriptions the notations which are used in the flowchart.
\(R_{\text {i(t)}}\): The theoretical R value for the \(i{\text {th}}\) block
\(C_{\text {i(t)}}\): The theoretical C values for the \(i{\text {th}}\) block
{\(R_\mathrm{c}\)}: Set of commercially available resistor values
{\(C_\mathrm{c}\)}: Set of commercially available capacitor values
{\(R'_\mathrm{c}\)}: Set of possible resistor values after n number of series/parallel combinations of the members of {\(R_\mathrm{c}\)}
{\(C'_\mathrm{c}\)}: Set of possible capacitor values available by n number of series/parallel combinations of the members of {\(C_\mathrm{c}\)}
\(R_{\text {i(t)}}\): The finally selected R value for the \(i{\text {th}}\) block in practical circuit
\(C_{\text {i(t)}}\): The finally selected C value for the \(i{\text {th}}\) block in practical circuit

Histogram plots for Monte Carlo simulations for 5% tolerance band in R and C for the case a desired \(\alpha \) = 0.2, PB = 0.5\(^\circ \), b desired \(\alpha \) = 0.5, PB = 0.5\(^\circ \), c desired \(\alpha \) = 0.2, PB = 2.0\(^\circ \), d desired \(\alpha \) = 0.5, PB = 2.0\(^\circ \)
This approach can be optimized further, using the genetic algorithm technique. Such genetic algorithm-based optimization of Valsa structure has already been reported in [25]. Similar optimization will be pursued for the presented technique in the future work.
It is also important to mention that the commercial R and C elements come with some certain tolerance bands. A resistor of 10 k\(\Omega \) with 5% tolerance can have a resistance value between 9.5 and 10.5 k\(\Omega \). These tolerance bands deviate the fractor response further, changing the PB value. A study has been carried out in this work through several Monte Carlo simulations in PSpice, with 5% tolerance band for both R and C. For different \(\alpha \) and PB specifications, the histogram plots of practically achieved PB are shown in Fig. 11a–d. It can be seen that when the desired PB is 0.5\(^\circ \), more than 90% cases result in PB less than 0.75\(^\circ \). When the desired PB is 2.0\(^\circ \), more than 84% cases result in PB less than 3.0\(^\circ \). The rate of occurrence is more when the desired \(\alpha \) is less.
5.1 Practical Realization and Experimental Results
Finally, to validate the proposed guidelines in practice, fractors \(\hbox {LF}_1\) and \(\hbox {LF}_3\) are realized in hardware. The practical R and C values are chosen as per the algorithm of Fig. 10. Both practical and theoretical values are presented in Tables 5 and 6. The * marked entries in the table indicate that the values are achieved by a series connection of two resistors or parallel connection of two capacitors. The R and C are chosen with 5% tolerance band. Total 32 elements are needed to design the fractor with PB = 0.5\(^\circ \), but only 21 elements to design with PB = 2.0\(^\circ \).

The experimentally obtained impedance plots for practically realized fractors: a phase plots, b magnitude plots
The experimentally obtained phase and magnitude plots (data are collected using Novocontrol impedance analyzer) are shown in Fig. 12a, b. Table 7 gives the experimentally obtained value of \(\alpha \), F, CPZ limits, and PB. It is found that the experimental PB values are 0.64\(^\circ \) and 3.45\(^\circ \), which closely matches the desired PB specifications. The deviation in PB values is due to the tolerance bands, which is per the Monte Carlo simulation.
6 Conclusion
Fractor design using discrete RC component is a topic of approximation. This paper presents guidelines for both Foster I and Foster II design of ladder structures using which a fractor can be realized with all its parameters specified, i.e., constant phase or \(\alpha \), fractance, CPZ limits as well as phase band. The primary contribution of this work is to include the phase band into the design. The ladder fractor, designed with the proposed guidelines, matches the specifications much closer than those, which are designed by other standard methods, like Oustaloup, Matsuda, or Valsa method. Several MATLAB and PSpice simulations, as well as hardware experimental results, are presented to substantiate the advantages of the proposed technique. With such better control on the fractor realization, design of fractional order oscillators, filters, and other FO circuitries will now be more accurate.
In the future work, the proposed guidelines are to be extended for the Cauer structure as well. A genetic algorithm-based optimization technique can thus be adopted to select the most optimal structure depending upon the given availability of R and C elements.
References
A.M. AbdelAty, A.S.W.A. Ahmed, A.G. Radwan, On the analysis and design of fractional-order chebyshev complex filter. Circuits Syst. Signal Process. pp. 915–938 (2018)
A. Adhikary, S. Choudhary, S. Sen, Optimal design for realizing a grounded fractional order inductor using shape GIC. IEEE Trans. Circuits Syst I 65(8), 2411–21 (2018)
A. Adhikary, M. Khanra, J. Pal, K. Biswas, Realization of fractional order elements. INAE Lett. 2(2), 41–47 (2017)
A. Adhikary, M. Khanra, S. Sen, K. Biswas, Realization of a carbon nanotube based electrochemical fractor, in International Symposium on Circuits and System, ISCAS 2015 (Lisbon, Portugal, 2015), p. 2329–32
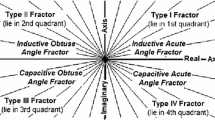
A. Adhikary, P. Sen, S. Sen, K. Biswas, Design and performance study of dynamic fractors in any of the four quadrants. Circuits Syst. Signal Process. 35(6), 1909–32 (2015)
A. Adhikary, S. Sen, K. Biswas, Practical realization of tunable fractional order parallel resonator and fractional order filters. Trans. Circuits. Syst. I 63(8), 1142–51 (2016)
A. Adhikary, S. Sen, K. Biswas, Realization and study of a fractional order resonator using an obtuse angle fractor, in: IEEE Students’ Technology Symposium (IEEE TechSym 2016), Kharagpur, India (2016)
A. Adhikary, S. Sen, K. Biswas, Design and hardware realization of a tunable fractional order series resonator with high quality factor. Circuits Syst. Signal Process. 36(9), 3457–76 (2017)
A. Agambayev, M. Farhat1, S.P. Patole1, A.H. Hassan1, H. Bagci1, K.N. Salama1, An ultra-broadband single-component fractional-order capacitor using MoS2-ferroelectric polymer composite. Appl. Phys. Lett. (2018). https://doi.org/10.1063/1.5040345
P. Bertsias, C. Psychalinos, A. Elwakil, B. Maundy, Current-mode capacitorless integrators and differentiators for implementing emulators of fractional-order elements. AEU Int. J. Electron. Commun. 80, 94–103 (2018)
R. Caponetto, S. Graziani, F.L. Pappalardo, F. Sapuppo, Experimental characterization of ionic polymer metal composite as a novel fractional order element. Adv. Math. Phys. 2013, 1–10 (2013) Article ID: 953695
G.E. Carlson, C.A. Halijak, Approximation of fractional capacitors \((1/s)^{1/n}\) by a regular Newton process. IEEE Trans. Circuits Syst. CAS-11 (2), 210–213 (1964)
A. Charef, H.H. Sun, Y.Y. Tsao, B. Onaral, Fractal system as represented by singularity function. IEEE Trans. Autom. Control 37(9), 1465–70 (1992)
S. Das, Functional Fractional Calculus: For System Identification and Controls, 2nd edn. (Springer, Berlin, 2011)
O. Domansky, R. Sotner, L. Langhammer, J. Jerabek, C. Psychalinos, G. Tsirimokou, Practical design of RC approximants of constant phase elements and their implementation in fractional-order PID regulators using cmos voltage differencing current conveyors. Circuits Syst. Signal Process. pp. 1–27 (2018). https://doi.org/10.1007/s00034-018-0944-z
S.C. DuttaRoy, On the realization of a constant-argument immitance of fractional operator. IEEE Trans. Circuit Theory 14(3), 264–274 (1967)
P. Dwivedi, S. Pandey, A.S. Junghareb, Robust and novel two degree of freedom fractional controller based on two-loop topology for inverted pendulum. ISA Trans. 75, 189–206 (2018)
A. Elwakil, Fractional-order circuits and systems: an emerging interdisciplinary research area. IEEE Circuits Syst. Mag. 10(4), 40–50 (2010)
A. Elwakil, A. Allagui, B.J. Maundy, C. Psychalinos, Low frequency oscillator using a super-capacitor. AEU Int. J. Electron. Commun. 70(7), 970–973 (2016)
D. Goyal, P. Varshney, Analog realization of electronically tunable fractional-order differ-integrators. Arab. J. Sci. Eng. 1–16 (2018)
T.C. Haba, G. Ablart, T. Camps, F. Olivie, Influence of the electrical parameters on the input impedance of a fractal structure realised on silicon. Chaos, Solitons Fractals 24(2), 479–490 (2005)
Q. He, Y. Pu, B. Yu, X. Yuan, Scaling fractal-chuan fractance approximation circuits of arbitrary order. Circuits Syst. Signal Process (2019)
D.A. John, S. Banerjee, G.W. Bohannan, K. Biswas, Solid-state fractional capacitor using mwcnt-epoxy nanocomposite. Appl. Phys. Lett. 110(16), 163504 (2017)
N. Kalil, L.A. Said, A.G. Radwan, A.M. Soliman, Generalized two-port network based fractional order filters. AEU Int. J. Electron. Commun. 104, 128–146 (2019)
A. Kartci, A. Agambayev, M. Farhat, N. Herencsar, L. Brancik, H. bagci, K.N. Salama, Synthesis and optimization of fractional-order elements using a genetic algorithm. IEEE Access 7, 80233–46 (2019)
A. Kartci, A. Agambayev, N. Herencsar, K.N. Salama, Analysis and verification of identical-order mixed-matrix fractional-order capacitor networks, in 2018 14th Conference on Ph.D. Research in Microelectronics and Electronics (PRIME), Switzerland, (2018), p. 277
G. Liang, J. Hao, Analysis and passive synthesis of immittance for fractional-order two-element-kind circuit. Circuits Syst. Signal Process. 38, 3661–3681 (2019)
S. Mahata, R. Kar, D. Mandal, Optimal fractional-order highpass butterworth magnitude characteristics realization using current-mode filter. AEU Int. J. Electron. Commun. 102, 78–89 (2019)
K. Matsuda, H. Fujii, \(\text{ H }_\infty \) optimized wave-absorbing control: analytical and experimental results. J. Guidance Control Dyn. 16(6), 1146–53 (1993)
D. Mondal, K. Biswas, Packaging of single component fractional order element. IEEE Trans. Device Mater. Rel. 13(1), 73–80 (2013)
K.B. Oldham, C.G. Zoski, Analogue instrumentation for processing polarographic data. J. Electroanal. Chem. 157, 27–51 (1983)
A. Oustaloup, F. Levron, B. Mathieu, F. Nanot, Frequency band complex non integer differentiator: characterization and synthesis. IEEE Trans. Circuits Syst. I 47(1), 25–40 (2000)
I. Petra, Tuning and implementation methods for fractional-order controllers. Fract. Calculus Appl. Anal. 15(2), 282–303 (2012)
I. Podlubny, Fractional-order systems and shape P shape I\(^{\lambda }\) shape D\(^{\mu }\)-controllers. IEEE Trans. Autom. Control 44(1), 208–214 (1999)
A.G. Radwan, A.S. Elwakil, A.M. Soliman, Fractional-order sinusoidal oscillators: design procedure and practical examples. IEEE Trans. Circuit. Syst. I 55(7), 2051–63 (2008)
A.G. Radwan, A.S. Elwakil, A.M. Soliman, On the generalization of second-order filters to the fractional-order domain. J. Circuits Syst. Comput. 18(2), 361–386 (2009)
A.G. Radwan, M. Fouda, Optimization of fractional-order shape RLC filters. Circuits Syst. Signal Process. 32(5), 2097–2118 (2013)
A.G. Radwan, A.M. Soliman, A.S. Elwakil, On the stability of linear system with fractional order elements. Chaos, Solitons Fractals 40, 2317–28 (2009)
M.S. Sarafraz, M.S. Tavazoei, Realizabilty of fractional-order impedances by passive electrical networks composed of a fractional capacitor and shape rlc components. IEEE Trans. Circuit Syst. I 62(12), 2829–36 (2015)
Z.M. Shah, M.Y. Kathjoo, F.A. Khanday, K. Biswas, C. Psychalinos, A survey of single and multi-component fractional-order elements ( shape FOEs) and their applications. Microelectron. J. 84, 9–25 (2019)
R. Sotnar, J. Jerabek, A. Kartci, O. Domansky, N. Herenscsar, V. Kledrowetz, B.B. Alagoz, C. Yeroglu, Electronically reconfigurable two-path fractional-order shape PI/D controller employing constant phase blocks based on bilinear segments using shape CMOS modified current differencing unit. Microelectron. J. 86, 114–129 (2019)
S. Tu, Q. Jiang, X. Zhang, H.N. Alshareef, Solid state mxene based electrostatic fractional capacitors. Appl. Phys. Lett. 114(23), 232903 (2019)
M.C. Tripathy, D. Mondal, K. Biswas, S. Sen, Design and performance study of phase-locked loops ( shape PLLs) using fractional order loop filters. Int. J. Circuit Theory Appl. 43 (2014)
G. Tsirimokou, C. Psychalinos, A.S. Elwakil, Switched-current fractional-order filter designs, in: 2016 IEEE International Symposium on Circuits and Systems (ISCAS), (2016), p. 682
G. Tsirimokou, C. Psychalinos, A.S. Elwakil, K.N. Salama, Electronically tunable fully integrated fractional-order resonator. IEEE Trans. Circuits Syst II pp. 166–170 (2018)
J. Valsa, J. Vlach, RC models of a constant phase element. Int. J. Circuit Theory Appl. 41(1), 59–67 (2013)
R. Verma, N. Pandey, R. Pandey, Realization of a higher fractional order element based on novel OTA based IIMC and its application in filter. Analog Integr. Circuits Signal Process. 97, 177–191 (2018)
A. Wahab, W. Omar, N.H. Abbas, A new method to tune a fractional-order shape PID controller for a twin rotor aerodynamic system. Arab. J. Sci. Eng. (2017). https://doi.org/10.1007/s13369-017-2629-5
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Adhikary, A., Shil, A. & Biswas, K. Realization of Foster Structure-Based Ladder Fractor with Phase Band Specification. Circuits Syst Signal Process 39, 2272–2292 (2020). https://doi.org/10.1007/s00034-019-01269-w
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00034-019-01269-w