
Abstract
Robotic technology is acquiring more attention now. COVID-19 pandemic brought a large change within short span of time making social distancing among everyone. High safety considerations have to be established everywhere, and in case of hospitals, it is necessary. In order to control a robot, we have to go deep into its control strategies. Control strategy is the major section of robot that makes a robot self-stabilized and helps to control its position and thereby reducing the error. In this chapter, the control strategy and machine learning approach in robot are discussed. Control strategy discussed here helps to ensure the trajectory tracking by back stepping technique and by using sliding mode control (SMC). It helps to achieve the velocity convergence and balancing the robots. In SMC, there is presence of chattering, and other intelligent technique is also discussed to reduce this chattering phenomenon. Those intelligent techniques are adaptive neuro fuzzy interference system (ANFIS) and neuro-sliding mode control scheme. Also, machine learning (ML) which is a part of artificial intelligence (AI) is also discussed here. This chapter mainly focusing on the idea of two-wheeled balancing robot with SMC and back stepping controller along with information about machine learning technology
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Zeng, Z., Chen, P.J., Alan A.L.: From high-touch to high-tech: Covid 19 drives robotics adoption, Tourism Geographies (2020)
Khan, Z.H., Siddique, A., Lee, C.W.: Robotics utilization for healthcare digitization in global covid19 management, Int. J. Environ. Res. Public Health, 28 May 2020
Yang, G.Z., Nelson, B.J., Murphy, R.R., Choset, H., Christensen, H., Collins, S.H., Dario, P., Goldberg, K., Ikuta, K., Jacobstein, N. et al.: Combating covid 19—the role of robotics in managing public health and infectious diseases. Sci. Robot. (2020)
Vänni, K.J., Salin, S.E., Kheddar, A., Yoshida, E., Suzuki, K., Cabibihan, J.J, Eyssel, F.: A need for service robots among health care professionals in hospitals and housing services. Appl. Evolut. Comput. 10652, 178–187 (2017)
Lakshmi, N.K., kumaran, D.N.M., Rajakumar, G.: Design and fabrication of medicine delivery robots for hospitals. In: Proceedings of (ICRTCCNT’19), Kings Engineering College, 18–19 October 2019
360 degree protection hits HIA’s from every angle. https://xenex.com/light-strike/
Quantigence report, robotics and AI assist in caring for the elderly. Nanalyze. Available online: https://www.nanalyze.com/2017/11/robotics-ai-caring-elderly/ (accessed on 19 March 2020)
Care is a team effort. Diligentrobots. Available online: https://diligentrobots.com/ (accessed on 18 March 2020)
What are the main types of robots used in healthcare? verdict. Available online: https://www.medicaldevice-network.com/comment/what-are-the-main-types-of-robots-used-in-healthcare/ (accessed on 19 March 2020)
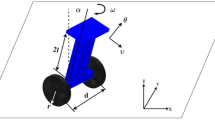
Esmaeili, N., Alfi, A., Khosravi, H.: Balancing and trajectory tracking of two-wheeled mobile robot using back stepping sliding mode control: design and experiments, Springer Science and Business Media Dordrecht (2017)
Kapoor, N., Ohri, J.: Sliding Mode Control (SMC) of robot manipulator via intelligent controllers, Springer (2016)
Mohareri, O., Dhauodi, R., Rad, A.B.: Indirect adaptive tracking control of a nonholonomic mobile robot via neural networks, Elsevier (2012)
Villarreal-Cervantes, M.G., Guerrero-Castellanos, J.F., Ramírez-Martínez, S., Sanchez-Santana, J.P.: Stabilization of a (3,0) mobile robot by means of an event-triggered control. ISA Trans. 58, 605–613 (2015)
Miah, M.S., Gueaieb, W.: Mobile robot trajectory tracking using noisy RSS measurements: an RFID approach. ISA Trans. 53, 433–443 (2014)
Baloh, M., Parent, M.: Modeling and model verification of an intelligence self-balancing two-wheeled vehicle for an autonomous urban transportation system. In: Conf. Comput. Intell., Robot., Auton. Syst., pp. 1–7 (2003)
Salerno, A., Angeles, J.: A new family of two wheeled mobile robots: modelling and controllability. IEEE Trans. Robot. 23, 169–173 (2007)
Kim, Y., Lee, S., Kim, D.H.: Dynamic equations of a wheeled inverted pendulum with changing its centre of gravity. In: Int. Conf. Control., Autom. Syst., pp. 8534–854 (2011)
Pinzon-Morales, R.D., Hirata, Y.: A portable stand-alone bi-hemispherical neuronal network model of the cerebellum for adaptive robot control. In: IEEE Int. Conf. Robot. Biomim., pp. 1148–1151 (2014)
Wu, J., Jia, S.: T-S adaptive neural network fuzzy control applied in two-wheeled self-balancing robot. In: Int. Forum Strat. Technol., pp. 1023–1026 (2011)
Zeng, W., Wang, Q., Liu, F., Wang, Y.: Learning from adaptive neural network output feedback control of a unicycle-type mobile robot. ISA Trans. 61, 337–347 (2016)
Dai, Y., Kim, Y., Wee, S.G., Lee, D.H., Lee, S.G.: Symmetric caging formation for convex polygonal object transportation by multiple mobile robots based on fuzzy sliding mode control. ISA Trans. 60, 321–332 (2016)
Balancing and trajectory tracking of two-wheeled mobile robot using back stepping sliding mode control: design and experiments
Asif, M., Jan, S., Rahman, M.U.R., Khan, Z.H.: Waiter robot—solution to restaurant automation. In: Proc. 1St Stud. Multi Discipl. Res. Conf., pp. 14–15, Wah Cantt, Pakistan, 14–15 November 2015
Kumar, M., Shenbagaraman, V.M., Ghosh, A.: Predictive data analysis for energy management of a smart factory leading to sustainability. In: Favorskaya, M.N., Mekhilef, S., Pandey, R.K., Singh, N. (eds.) Innovations in electrical and electronic engineering, pp. 765–773. Springer (2020) ISBN 978-981-15-4691-4
Mandal, S., Balas, V.E., Shaw, R.N., Ghosh, A.: Prediction analysis of idiopathic pulmonary fibrosis progression from OSIC dataset. In: 2020 IEEE Int. Conf. Comput., Power Commun. Technol. (GUCON), pp. 861–865, 2–4 October 2020. https://doi.org/10.1109/gucon48875.2020.9231239
Mandal, S., Biswas, S., Balas, V.E., Shaw, R.N., Ghosh, A.: Motion prediction for autonomous vehicles from lyft dataset using deep learning. In: 2020 IEEE 5Th Int. Conf. Comput. Commun. Autom. (ICCCA), pp. 768–773, 30–31 October 2020. https://doi.org/10.1109/iccca49541.2020.9250790
Shaw, R.N., Walde, P., Ghosh, A.: IOT based MPPT for performance improvement of solar PV arrays operating under partial shade dispersion. In: 2020 IEEE 9Th Power India Int. Conf. (PIICON) held at Deenbandhu Chhotu Ram University of Science and Technology, SONEPAT. India on February 28–March 1 2020
Fatima, M., Shafique, M., Khan, Z.H.: Towards a low-cost brain-computer interface for real time control of a 2-DOF robotic arm. In: Proc. Int. Conf. Emerg. Technol. IEEE, pp. 1–6, Peshawar, Pakistan, 19–20 December 2015
Taylor, R.H., Kazanzides, P., Fischer, G.S., Simaan, N.: Medical robotics and computer-integrated interventional medicine, pp. 617–672. Elsevier, Amsterdam, The Netherlands, 2020
Liu, C., Rani, P., Sarkar, N.: An empirical study of machine learning techniques for affect recognition in human-robot interaction, Springer (2016)
Clabaugh, C., Matarić, M.: Robots for the people, by the people: personalizing human-machine interaction, Science robotic, Focus (2019)
Jung, S.: Improvement of tracking control of a sliding mode controller for robot manipulators by a neural network, Springer (2018)
Barak, K., Veloso, M.M.: Mobile service robot state revealing through expressive lights: formalism, design, and evaluation, Accepted: 28 September 2017/ Published online: 16 October 2017, Springer Science and Business Media B.V. (2017)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this chapter

Cite this chapter
Amritha Ashok, K., Savy, A., Shijoh, V., Shaw, R.N., Ghosh, A. (2021). Hospital Assistance Robots Control Strategy and Machine Learning Technology. In: Bianchini, M., Simic, M., Ghosh, A., Shaw, R.N. (eds) Machine Learning for Robotics Applications. Studies in Computational Intelligence, vol 960. Springer, Singapore. https://doi.org/10.1007/978-981-16-0598-7_3
Download citation
DOI: https://doi.org/10.1007/978-981-16-0598-7_3
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-0597-0
Online ISBN: 978-981-16-0598-7
eBook Packages: Intelligent Technologies and RoboticsIntelligent Technologies and Robotics (R0)