
Abstract
Planetary gearboxes are usually used in several hard work conditions. In fact, they are well known for their symmetrical structure which allows an equal share of the total external torque applied between the planetary gears, the sun and the ring. However non stationary conditions of work such as overload conditions, torque fluctuation during the start-up process in diesel engines and environmental conditions, may affect seriously and unpredictably the dynamic behavior of a planetary gear transmission. As part of an effort to understand this aspect, the present study assessed the impact of external load fluctuation on a planetary gearbox dynamic behavior. For this, a model of planetary gearbox vibration using the lumped mass approach was developed. The model includes effects such as variable tooth mesh stiffness and non stationary external load. Numerical simulations are carried out using a Newark based algorithm. The dynamic vibration results were analyzed using frequency spectrum analysis and develop analysis. Discussion and results are included based on the overall results and analysis.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
During over last two decades, several researches activities have been focused on machinery working under non-stationary load/speed conditions. The non-stationary operating conditions, considered as simultaneous load and speed variation influence machinery diagnosis in a crucial way. In fact, non-stationary fluctuating speed will modify the signal structure leading to frequency modulation. In this case, classical spectral based feature extraction will be no longer efficient.
Planetary gears are one of the most transmission systems that are frequently subjected to time varying loading conditions. Mining machines and wind turbines are typical mechanical systems including such transmissions and such varying loading phenomena.
Randall [1] stated that the amplitude of a gearbox casing vibration, caused by the meshing of the gears, is modulated by the load fluctuation.
Bartelmus [2] has classified the factors that affect the dynamic behavior of a gearbox system into four groups: design, production technology, operation and change condition. A method of examining the influence of the load on diagnostic feature values was proposed by Bartelmus [3]. He claimed that the dependence between the load value and the value of signal vibration is linear in a certain range of frequencies.
Bartelmus and Zimroz [4] showed the importance of identifying the external varying load condition to monitor planetary gearboxes. Bartelmus et al. [5] adopted a model based approach that a transmission subjected to time-varying loading conditions is more sensitive in terms of vibration level than a healthy transmission. In order to explain and understand transient phenomena in gear transmission under non-stationary operations, several techniques can be used.
Zimroz et al. [6] proposed a novel procedure for instantaneous speed estimation using vibration signal. They used an automatic segmentation algorithm in time frequency domain. Zhan et al. [7] proposed a novel technique for state detection of gearbox under varying load condition, which fits a time-varying autoregressive model to the gear motion residual signals applying a noise-adaptive filter. Reviewing the literature, we notice that few authors have been interested in modeling the non stationary dynamic behavior phenomenon especially for planetary gears. Khabou et al. [8] studied the dynamic behavior of a spur gear in a transient regime by proposing an enhanced model of mesh stiffness evolution that takes into account the relation between loading conditions and driving motor speed in startup regime. Chaari et al. [9] applied this procedure for a single stage spur gear transmission objected to load fluctuation and validated results with experimental ones. He extended the procedure to a double stage gearbox transmission with random variation of load amplitude [10]. All these studies confirmed that vibration level is strictly related to load value.
This paper intends to develop the same procedure for the case of planetary gear transmission under time varying loading conditions.
2 Modeling of the Planetary Gear Transmission
The machine modeled is an excavator for mine digging. This machine is usually composed of a motor, a reducer and a planetary gearbox which rotate the bucket-wheel excavator. This last contains 12 buckets.
The varying external load, caused by the varying bucketing load, is applied to the arm-carrier on the planetary gearbox. The influence of this variation on the planetary gearbox dynamic behavior is investigated.
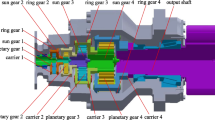
The planetary gearbox set model is a plane composed of a ring (r), sun gear (s), planets (P) and a carrier (c) which carries the planets as shown in Fig. 1. Each component is allowed to translate in two directions and rotate around rotational axis. There are two types of mesh contact: an external gear mesh between the sun gear and planets and an internal gear mesh between the ring and planets. The adopted model have (3N + 9) degrees of freedom, where N is the number of planets.

Gear mesh period varying with torque variation
Using the ‘Lagrange’ formulation, we obtain the equation of motion in matrix form as follow [5]:
Where q is the degree of freedom vector, M is the mass matrix, Cb is the bearings damping matrix [10], Ce is the mesh damping matrix, Kb is the bearings stiffness matrix, Ke (t) is the mesh stiffness matrix and F(t) is the external force vector applied on the system. Expressions of M, Kb, Ke(t) and F(t) are given in Chaari et al. [10].
When the system is driven by a n asynchronous motor, if we increase the resistant torque, we note an increase in the slip and consequently a decrease in the motor speed. Such varying rotational speed will lead to a varying gear mesh frequency since it depends on the rotational frequency of the sun shaft. This gear mesh frequency can be expressed as:
Where \( {f_s}(t) \) is the varying sun shaft rotational frequency, Zs: teeth number of the sun and Zr is teeth number of the ring.
For the planetary gear model we have introduced some functions to express the phase shift in the gear mesh stiffness period of each component of the gearbox as well as the period variability according to loading conditions. Figure 2 shows the phase shift of the carrier shaft, ring gear and sun-gear as well as the correlation between gear mesh stiffness signal and the torque shape. We notice a difference between the phase shifts of each component. This difference will be considered along the numerical analysis which is a new approach.

Phase shift on the sun-gear component
The gear mesh stiffness for a sun-planet n mesh can be expressed by:
\( {f_{mesh}}(t) \) is the time varying mesh frequency.
\( {\gamma_{si}} \) and \( {\gamma_{ri}} \)are respectively the phasing between sun planets and planets ring {i = 1, 2, 3, 4}. k m is the mean value of the mesh stiffness and k sj , k rj are amplitudes of stiffness fluctuation around the mean value. The speed variation caused by the load variation, causes a variation in the gear mesh stiffness period. So the assumption that the mesh stiffness period is constant is no longer kept. In fact, Fig. 2 shows that for a decreasing cycle of the driving torque, the gear mesh stiffness period decreases.
3 Numerical Simulations
The dynamic response of the planetary gear transmission is computed to look at the different vibration signatures obtained when a time varying loading condition is applied. A focus is made on sun (input) and carrier bearing (output) acceleration. The load applied on machine fluctuates in a saw-tooth shape with a frequency fload = 1.92 Hz (Tload = 0.52 s). The fixed-ring planetary gear parameters are given in Table 1.
3.1 Vibration Response on the Carrier Bearing
The external torque applied to the planetary gear is considered varying in a sawtooth shape function (Fig. 3).

Torque applied to the planetary gearbox
Figure 4 shows the acceleration of the carrier on the x direction. The influence of varying load on the sun vibration signal is noted. In fact it can be seen clearly that the signals are modulated by the variation of the torque. The amplitude of the acceleration increases when the torque increases.

Carrier bearing vibration on x-direction
3.2 Envelop Analysis
In order to put in evidence the modulation effect, spectrum is not suitable. To detect the response frequencies, an envelop analysis based method has been used. For each time varying signal x(t), we can associate the following analytical signal:
H(x(t)) is the hilbert transformation of the signal x(t). The envelop is then defined as the module of zx(t).
Spectrum of the envelope of the signal is shown in Fig. 5.

Spectrum of the carrier bearing envelop
From the Fig. 5, it is clear that the load variation frequency is dominating this spectrum which confirm that this frequency. The spectrum contains also the mesh frequency (20.03 Hz) as detailed in Table 2. We can deduce that the amplitude frequency variation can cause an amplitude increase or drop of amplitude components of the vibration spectrum.
4 Conclusion
In this paper a model of a single-stage planetary gear set was developed to examine its dynamic behavior in the case of time varying loading conditions which is the case of several industrial cases such as mining machines. The different mesh stiffness was defined in these conditions. It was a found an intimate relation between the load variation and the response amplitude. Several extensions can be done for this work. The case of multistage gearboxes and interaction with other mechanical components can be investigated. Time frequency analysis should be implemented to analyze the frequency content since the system runs under non-stationary operations.
References
Randall, R.B.: A new method of modeling gear faults. J. Mech. Des. 104, 259–267 (1982)
Bartelmus, W.: Mathematical modeling and computer simulations as an aid to gearbox diagnostics. Mech. Syst. Signal Process. 15, 855–871 (2001)
Bartelmus, W.: Vibration condition monitoring of gearboxes. Mach. Vib. 1, 178–189 (1992)
Bartelmus, W., Zimroz, R.: Vibration condition monitoring of planetary gearbox under varying external load. Mech. Syst. Signal Process. 23, 246–257 (2009)
Bartelmus, W., et al.: Modelling of gearbox dynamics under time-varying non stationary load for distributed fault detection and diagnosis. Eur. J. Mech. A/Solids 29, 637–646 (2010)
Zimroz, R., et al.: A procedure of vibration analysis from planetary gearbox under non-stationary cyclic operations for instantaneous frequency estimation in time-frequency domain. In: Conference on Condition Monitoring and Machinery Failure Prevention Technologies (CM and MFPT 2010), Stratfodr-upon-Avon, UK, 2010
Zhan, Y., et al.: Adaptive state detection of gearboxes under varying load conditions based on parametric modelling mechanical. Mech. Syst. Signal Process. 20(1), 188–221 (2006)
Khabou, M.T., et al.: Study of a spur gear dynamic behavior in transient regime. Mech. Syst. Signal Process. 25(8), 3089–3101 (2011)
Chaari, F., et al.: Gearbox vibration signal amplitude and frequency modulation. Shock. Vib. 18, 1–18 (2011)
Chaari, F., et al.: Model based investigation on a two stages gearbox dynamics under non-stationary operations. In: Proceedings of the Second International Conference “Condition Monitoring of Machinery in Non Stationary Opertations”, 26–28 Mar 2012, Springer
Acknowledgments
This paper was financially supported by the Tunisian – Spanish Joint Project no A1/037038/11.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer Science+Business Media Dordrecht
About this paper
Cite this paper
Feki, M.S., Chaari, F., Abbes, M.S., Viadero, F., del Rincon, A.F., Haddar, M. (2013). Dynamic Analysis of Planetary Gear Transmission Under Time Varying Loading Conditions. In: Viadero, F., Ceccarelli, M. (eds) New Trends in Mechanism and Machine Science. Mechanisms and Machine Science, vol 7. Springer, Dordrecht. https://doi.org/10.1007/978-94-007-4902-3_33
Download citation
DOI: https://doi.org/10.1007/978-94-007-4902-3_33
Published:
Publisher Name: Springer, Dordrecht
Print ISBN: 978-94-007-4901-6
Online ISBN: 978-94-007-4902-3
eBook Packages: EngineeringEngineering (R0)