
Abstract
Ideally a flux tower should be installed on a homogeneous and flat terrain. The surface should be physically homogeneous (same forest height and thermal properties) as well as be covered by same tree species, or in the case of the mixed forest, the distribution of the different species should be even (“well-mixed”). The fetch, the outreach of the homogeneous surface, should be longer than the extension of source area of the measurement (footprint). However, many sites are not homogeneous enough in all directions from the tower. In the case of an inhomogeneous surface, knowledge of both the source area and strength is needed to interpret the measured signal. Note that inhomogeneity modifies the footprint by modifying the turbulent flow field. Thus, strictly speaking, any method not accounting for heterogeneities is useless for source area estimation. Namely, either the footprint model is fundamentally wrong because of the implicit assumption of homogeneity or, in the case of the fully homogeneous case, the outcome is trivial and no estimation is needed. Nevertheless, footprint models based on the assumption of horizontally homogeneous turbulence field serve as first approximation for evaluation of source contribution to measured flux in real observation conditions. An alternative is to take the flow inhomogeneity into account in footprint estimation by models capable of simulating such flow fields (cf. Sect. 8.4.1).
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
8.1 Concept of Footprint
Ideally a flux tower should be installed on a homogeneous and flat terrain. The surface should be physically homogeneous (same forest height and thermal properties) as well as be covered by same tree species, or in the case of the mixed forest, the distribution of the different species should be even (“well-mixed”). The fetch, the outreach of the homogeneous surface, should be longer than the extension of source area of the measurement (footprint). However, many sites are not homogeneous enough in all directions from the tower. In the case of an inhomogeneous surface, knowledge of both the source area and strength is needed to interpret the measured signal. Note that inhomogeneity modifies the footprint by modifying the turbulent flow field. Thus, strictly speaking, any method not accounting for heterogeneities is useless for source area estimation. Namely, either the footprint model is fundamentally wrong because of the implicit assumption of homogeneity or, in the case of the fully homogeneous case, the outcome is trivial and no estimation is needed. Nevertheless, footprint models based on the assumption of horizontally homogeneous turbulence field serve as first approximation for evaluation of source contribution to measured flux in real observation conditions. An alternative is to take the flow inhomogeneity into account in footprint estimation by models capable of simulating such flow fields (cf. Sect. 8.4.1).
The footprint defines the field of view of the flux/concentration sensor and reflects the influence of the surface on the measured turbulent flux (or concentration). Strictly speaking, a source area is the fraction of the surface (mostly upwind) containing effective sources and sinks contributing to a measurement point (see Kljun et~al. 2002). The footprint is then defined as the relative contribution from each element of the surface area source/sink to the measured vertical flux or concentration (see Schuepp et~al. 1990; Leclerc and Thurtell 1990). Functions describing the relationship between the spatial distribution of surface sources/sinks and a signal are called the footprint function or the source weight function as shown in (Horst and Weil 1992, 1994; see also Schmid 1994 for details). The fundamental definition of the footprint function ϕ is given by the integral equation of diffusion (Wilson and Swaters 1991; see also Pasquill and Smith 1983):
where \( \eta \) is the quantity being measured at location \( \vec{x} \) (note that \( \vec{x} \) is a vector) and \( Q(\vec{x}^\prime) \) is the source emission rate/sink strength in the surface-vegetation volume R. \( \eta \) can be the concentration or the vertical eddy flux and ϕ is then concentration or flux footprint function, respectively.
The footprint problem essentially deals with the calculation of the relative contribution to the mean concentration or flux at a fixed point in the presence of an arbitrary given source of a compound. Concentration footprints tend to be generally longer than flux footprints (cf. Sect. 8.2.4). The source area naturally depends on measurement height and wind direction. The footprint is also sensitive to both atmospheric stability and surface roughness, as first pointed out by Leclerc and Thurtell (1990). The stability dependence of crosswind-integrated flux footprint function for four different stability regimes is illustrated in Fig. 8.1. It can be seen that the peak location is closer to the receptor and less skewed in the upstream direction with increasingly convective conditions. In unstable conditions, the turbulence intensity is high, resulting in the upward transport of any compound and a shorter travel distance/time. Typically, the location of the footprint peak ranges from a few times the measurement height (unstable) to a few dozen times (stable). In the lateral direction, the stability influences footprints in a similar fashion. Note also the small contribution of the downwind turbulent diffusion in convective cases. Mathematically, the surface area of influence on the entire flux goes to infinity and thus one must always define the %-level for the source area (see Schmid 1994). Often 50%, 75%, or 90% source areas contributing to a point flux measurement are considered.

Crosswind-integrated footprint for flux measurements for four different cases of stabilities (strongly convective, forced convective, neutral, and stable conditions; measurement height: 50 m, roughness length: 0.05 m) obtained by Lagrangian simulation according to Kljun et~al. (2002)
The concentration footprint function is always between 0 and 1 whereas the flux footprint function may be even negative for a complex, convergent flow over a hill (Finnigan 2004). In a horizontally homogeneous shear flow, the flux footprint ϕ f does satisfy 1 > ϕ f > 0, as it is the case always for the concentration footprint. The vertical distribution of the source/sink can also lead to an anomalous behavior (e.g., Markkanen et~al. 2003). Then, the flux footprint represents in fact a combined footprint function that is a source strength-weighted average of the footprints of individual layers. Because of the principle of superposition, the combined function may become negative if one or more of the layers have a source strength that is opposite in sign to the net flux between vegetation and atmosphere (Lee 2003). The combined function is not anymore a footprint function in the sense of Eq. 8.1 and we suggest that it would be called (normalized) flux contribution function (see also Markkanen et~al. 2003).
The determination of the footprint function ϕ is not a straightforward task and several theoretical approaches have been derived over the previous decades. They can be classified into four categories: (1) analytical models, (2) Lagrangian stochastic particle dispersion models, (3) large-eddy simulations, and (4) ensemble-averaged closure models. Additionally, parameterizations of some of these approaches have been developed, simplifying the original algorithms for use in practical applications (e.g., Horst and Weil 1992, 1994; Schmid 1994; Hsieh et~al. 2000; Kljun et~al. 2004a). The parameterization by Kljun et~al. (2004a) is available at http://footprint.kljun.net. The SCADIS closure model (cf. Sect. 8.4.1) was also simplified (two-dimensional domain, neutral stratification, flat topography, etc.) and provided with a user-friendly menu. The operating manual for the set of basic and new created programs, called “Footprint calculator,” was presented by Sogachev and Sedletski (2006) and is available freely by request to the authors or from Nordic Centre for Studies of Ecosystem Carbon Exchange (NECC) site (http://www.necc.nu/NECC/home.asp). A thorough overview over the development of the footprint concept is given in (Schmid 2002) with Foken and Leclerc (2004), Vesala et~al. (2008b), and Vesala et~al. (2010) providing more recent information on the subject. Table 8.1 lists the most important studies on footprint modeling.
8.2 Footprint Models for Atmospheric Boundary Layer
8.2.1 Analytical Footprint Models
The first concept to estimate a two-dimensional source weight distribution has been proposed by Pasquill (1972), using a simple Gaussian model to describe the transfer function between sources and measurement point. Schmid and Oke (1988, 1990) improved Pasquill’s approach by including a diffusion model based on the Monin-Obukhov similarity theory, with an analytical solution of the latter proposed by van Ulden (1978). The first paper, describing a simple analytical model to the diffusion equation using a constant velocity profile and neutral conditions, was presented by Gash (1986). The same approach was later adapted by Schuepp et~al. (1990) in a companion paper to Leclerc and Thurtell (1990) to describe the concept of “flux footprint.” Flux footprint is the assessment of the individual signatures from a particular source either on the ground, in the understory, or in the canopy crown to a point flux measurement.
With the addition of realistic velocity profiles and stability dependence, Horst and Weil’s analytical models (1992, 1994) further expanded the scope of this approach. Again, their analytical solution was based on van Ulden (1978). The analytical footprint models by Horst and Weil (1992, 1994) are not explicit and require numerical solution, although Horst and Weil (1994) have proposed an approximate analytical solution. To date, Schmid’s flux and concentration footprint models (1994, 1997) have been widely used. The two-dimensional extension of these models has generated additional insight into the interpretation of experimental data collected over patchy surfaces.
It should be mentioned that the above models, however compact in their formulation, suffer from numerical instabilities and generally perform poorly in stable conditions.
Later, Haenel and Grünhage (2001) and Kormann and Meixner (2001) have proposed explicit analytical expressions for flux footprint functions. Haenel and Grünhage (2001) used power law profiles for wind speed and eddy diffusivity to obtain an analytical solution. Monin-Obukhov similarity relationships were only introduced in a later stage of their derivation. Kormann and Meixner (2001) followed a similar approach, starting with power law profiles for wind speed and eddy diffusivity and introducing Monin-Obukhov similarity profiles by fitting the power law profiles to similarity profiles at later stage. As summarized by Schmid (2002), physical accuracy was sacrified for simplifications in the derivation of explicit analytical expressions. Therefore, the model by Horst and Weil (1992, 1994) is suggested for Atmospheric Surface Layer (ASL) conditions.
Analytical footprint models, as all other footprint models described here, are based on the assumption of steady-state conditions during the course of the flux period analyzed. They furthermore assume that no contribution to a point flux is possible by downwind sources and are unable to include the influence of nonlocal forcings to flux measurements. The latter point has been shown to be incorrect (Kljun et~al. 2002; Leclerc et~al. 2003a). Implicit in the use of these equations are the assumptions of (1) a horizontally homogeneous turbulence field; (2) no vertical advection; (3) the Monin-Obukhov similarity theory being applicable to the layer of air above the tower; and (4) all eddy contributions from the flux being contained within a sampling period. Recent findings for nocturnal atmospheric boundary layer (Karipot et~al. 2006, 2008a, b) and by Prabha et~al. (2007, 2008b) have shown that vertical advection is modulating the flux response. This fact is currently not included in footprint formulations.
The original footprint concept and its analytical solutions assigned the unit source strength to upwind surface sources. Most of the analytical solutions used have been one-dimensional with the implicit assumption that the sources are infinite in crosswind direction. In practice, this is certainly an issue of relevance as few sources/sinks cover a large enough area to allow neglecting the lateral component of the flow. The lateral diffusion gains significance with decreasing windspeed, that is, the lateral turbulence intensities become larger as the wind meanders.
8.2.2 Lagrangian Stochastic Approach
The Lagrangian stochastic (LS) models describe the diffusion of a scalar by means of a stochastic differential equation, a generalized Langevin equation,
where X(t) and V(t) denote trajectory coordinates and velocity as a function of time t, C 0 is the Kolmogorov constant, \( \bar{\varepsilon } \) is the mean dissipation rate of turbulent kinetic energy (TKE), and W(t) describes the three-dimensional Wiener process. This equation determines the evolution of a Lagrangian trajectory in space and time by combining the evolution of trajectory as a sum of deterministic drift a and random terms. The drift term is to be specified for each LS model constructed for specific flow regime (Thomson 1987).
The Lagrangian stochastic approach can be applied to any turbulence regime, thus allowing footprint calculations for various atmospheric boundary-layer flow regimes. For example, in the convective boundary layer, turbulence statistics are typically non-Gaussian and for realistic dispersion simulations, a non-Gaussian trajectory model has to be applied. An indication of the departure from Gaussianity is often obtained using the turbulence velocity skewness; for instance, in convective boundary layers, the vertical velocity skewness is typically 0.3 while a neutral canopy layer can exhibit negative vertical velocity skewness as large as −2.0 (Leclerc et~al. 1991; Finnigan 2000). However, most Lagrangian trajectory models fulfill the main criterion for construction of Lagrangian stochastic models, the well-mixed condition (Thomson 1987), for only one given turbulence regime.
It should be noted, however, that the Lagrangian stochastic models are not uniquely defined for atmospheric flow conditions. Even in the case of homogeneous but anisotropic turbulence, there are several different stochastic models which satisfy the well-mixed condition (Thomson 1987; Sabelfeld and Kurbanmuradov 1998). This is often called the uniqueness problem (for details, see the discussion in Kurbanmuradov et~al. 1999, 2001; Kurbanmuradov and Sabelfeld 2000). In addition to well-mixed condition by Thomson (1987), trajectory curvature has been proposed as the additional criterion to select the most appropriate Lagrangian stochastic model (Wilson and Flesch 1997), but this additional criterion does not define the unique model (Sawford 1999).
The stochastic Lagrangian method is, nevertheless, very convenient in footprint application: once the form of the parameterization is chosen, the stochastic Langevin-type equation is solved by a very simple scheme (e.g., Sawford 1985; Thomson 1987; Sabelfeld and Kurbanmuradov 1990). The approach needs only a one-point probability density function (pdf) of the Eulerian velocity field. The Lagrangian stochastic trajectory model together with appropriate simulation methods and corresponding estimators for concentration or flux footprints are usually merged into a Lagrangian footprint model. For a detailed overview of the estimation of concentrations and fluxes by the Lagrangian stochastic method, the concentration and flux footprints in particular, see Kurbanmurdov et~al. (2001).
The rather long computing times due to a large number of trajectories required for producing statistically reliable results is an unavoidable weakness of Lagrangian stochastic footprint models. To overcome this, Hsieh et~al. (2000) proposed an analytical model derived from Lagrangian model results. More recently, a simple parameterization based on a Lagrangian footprint model was proposed by Kljun et~al. (2004a). This parameterization allows the determination of the footprint from atmospheric variables that are usually measured during flux observation programs.
8.2.3 Forward and Backward Approach by LS Models
The conventional approach of using a Lagrangian model for footprint calculation is to release particles at the surface point source and track their trajectories downwind of this source toward the measurement location forward in time (e.g., Leclerc and Thurtell 1990; Horst and Weil 1992; Rannik et~al. 2000). Particle trajectories and particle vertical velocities are sampled at the measurement height. In case of horizontally homogeneous and stationary turbulence, the mean concentration at the measurement location (x, y, z) due to a sustained surface source Q located at height z 0 can be described as
where N is number of released particles and n i the number of intersections of particle trajectory i with the measurement height z; w ij , X ij and Y ij denote the vertical velocity and the coordinates of particle i at the intersection moment, respectively. Similarly, the mean flux is given by
The above equations apply identically also to elevated sources located at arbitrary height.
The concentration footprint and the flux footprint can be determined as follows:
Alternatively, it is possible to calculate the trajectories of a Lagrangian model in a backward time frame (cf. Thomson 1987; Flesch et~al. 1995; Flesch 1996; Kljun et~al. 2002). In this case, the trajectories are initiated at the measurement point itself and tracked backward in time, with a negative time step, from the measurement point to any potential surface source. The particle touchdown locations and touchdown velocities are sampled and mean concentration and mean flux at the measurement location can be described as
and
where w i0 is the initial (release) vertical velocity of the particle i and w ij is the particle touchdown velocity. Again, the concentration footprint and the flux footprint are determined using Eqs. 8.5 and 8.6. Note that in case of an elevated plane source with strength Q at arbitrary height Eqs. 8.5 and 8.6 are also applicable with the following modifications: the factor 2 is removed and the touchdown velocities are replaced by the vertical crossing velocities of the trajectories with the source level (both directions).
The forward and backward footprint estimates are theoretically equivalent. In practice, the forward LS models are applicable under horizontally homogeneous conditions since the method can be efficiently employed only using horizontal coordinate transformation. The backward estimators for concentration and flux do not assume homogeneity and stationarity of the turbulence field. The calculated trajectories can be used directly without a coordinate transformation. Therefore, if inhomogeneous probability density functions of the particle velocities are applied, backward Lagrangian footprint models hold the potential to be applied efficiently over inhomogeneous terrain.
In theory, the forward and backward footprint estimates are equivalent (Flesch et~al. 1995). However, certain numerical errors must be avoided. Cai and Leclerc (2007) show that the concentration footprint inferred from backward simulation can be erroneous due to discretization error close to surface where turbulence is strongly inhomogeneous and proposed an adjustment numerical scheme to eliminate the error. In addition, the backward footprint simulation can violate the well-mixed condition at the surface when perfect reflection scheme is applied to skewed or inhomogeneous turbulence (Wilson and Flesch 1993). This numerical problem can be also avoided by a suitable numerical scheme (Cai and Leclerc 2007; Cai et~al. 2008).
Lagrangian footprint models require a predefined turbulence field. Those can be obtained as parameterizations from atmospheric scaling laws such as Monin-Obukhov similarity theory or convective and stable atmospheric boundary-layer scaling laws. Alternatively, the parameterizations can be obtained from measurements or numerical modeling of atmospheric flow.
Closure models of any order can be applied to flow and footprint modeling, including horizontally inhomogeneous flow (see Sect. 8.4.1). Since computing costs may be high for three-dimensional calculations, a way to minimize the calculation time is to use flow statistics derived by an Atmospheric Boundary Layer (ABL) model for LS backward approach. Combined with closure model results, the LS approach has been applied to study the influence of transition in surface properties on the footprint function. The first attempt was done by Luhar and Rao (1994a, b) and by Kurbanmuradov et~al. (2003), later Hsieh and Katul (2009) applied stochastic model for estimating footprint and water vapor flux over inhomogeneous surfaces. They derived the turbulence field of the two-dimensional flow over a change in surface roughness using a closure model and performed Lagrangian simulations to evaluate the footprint functions.
Also Large-Eddy Simulation (LES) (see Sect. 8.2.5) approach has been used in combination with LS modeling to infer footprints for convective boundary layers as well as for canopy flow. For example, Cai and Leclerc (2007) and Steinfeld et~al. (2008) performed LS simulations for sub-grid scale turbulent dispersion. More recently, Prabha et~al. (2008a) made a comparison between the in-canopy footprints obtained using a Lagrangian simulation with those obtained against a large-eddy simulation. In that model, the Lagrangian stochastic model was driven by flow statistics derived from the large-eddy simulation.
8.2.4 Footprints for Atmospheric Boundary Layer
Most footprint models have been developed for a limited atmospheric flow regime. The first footprint study to apply Lagrangian simulations to the description of footprints is attributed to Leclerc and Thurtell (1990) who applied the LS approach to ABL. That study was the first to analyze the influence of atmospheric stability on footprints; it also showed for the first time the impact of surface roughness, atmospheric stability, and measurement height on the footprint. The importance of these results is reflected in that several NASA ABLE 3-B multi-scale, multi-platforms field campaigns were redesigned based on their preliminary calculations. As one of a few, Kljun et~al. (2002) presented a footprint model based on a trajectory model for a wide range of atmospheric boundary-layer stratification conditions.
The stability dependence has been investigated by Kljun et~al. (2002), comparing crosswind-integrated footprints predicted for different stability regimes by a three-dimensional Lagrangian simulation. In the example in Fig. 8.2, measurement height and roughness length were fixed to 10 and 0.01 m, respectively, whereas the friction velocity, vertical velocity scale, Obukhov length, and boundary-layer height were varied to represent convective, neutral, and stable conditions. In unstable conditions, the turbulence intensity is high, resulting in the upward transport of any compound and a shorter travel distance/time. Correspondingly, the peak location is closer to the receptor in unstable conditions. This is in agreement with the findings of Leclerc and Thurtell (1990) and with experimental validation of these models (Finn et~al. 1996; Leclerc et~al. 1997). Stability affects strongly the footprint peak location and its maximum value. Concentration footprints tend to be longer (Fig. 8.2).

(a) Crosswind-integrated flux and concentration footprints for 10 m observation height at (0/0) and 0.01 m roughness length under unstable (L = −30 m, u * = 0.2 m s−1, w * = 2.0 m s−1, z i = 2,500 m) and stable (L = 30 m, u * = 0.5 m s−1, z i = 200 m) conditions. (b) Cumulative footprints for the same conditions
Flux and concentration footprints differ significantly in spatial extent. In Lagrangian framework, this can be explained as follows: The flux footprint value over a horizontal area element is proportional to the difference of the numbers or particles (passive tracers) crossing the measurement level in the upward and downward directions. Far from the measurement point, the number of upward and downward crossings of particles or fluid elements across an imaginary x–y plane typically tends to be about the same and thus the up- and downward movements are counterbalanced decreasing the respective fractional flux contribution of those source elements to the flux system. In contrast to the flux footprint, each crossing contributes positively to the concentration footprint independently of the direction of the trajectory. This increases the footprint value at distances further apart from the receptor location.
The cumulative footprint function presented in Fig. 8.2b indicates the fraction of flux (or concentration) contributed by uniform surface sources to the measured flux. Note that the concept of cumulative effective fetch was introduced by Gash (1986) before the footprint function in differential form was proposed by Schuepp (1990). The cumulative footprint function is especially useful in determining the necessary horizontally homogeneous upwind distance for the measured flux to represent certain fraction of surface flux under investigation. Depending on the requirement of representativeness of the measured flux and contrast of the surface types, the cumulative fetch can be determined for different levels of homogeneous fetch. For example, if 80% of the flux should originate from the surface of interest, the homogeneous fetch must extend up to 250 and 500 m in unstable and stable conditions, respectively, for the observation conditions in Fig. 8.2.
The crosswind-integrated footprint function is useful when the assumption of surface homogeneity in crosswind direction applies. In case of patchy surface and also for some applications of footprints (see Sect. 8.5) two-dimensional footprint functions are needed (Fig. 8.3). Again, the flux and concentration footprints exhibit significantly different spatial extent for the same height and roughness conditions.

Footprint functions for neutral atmospheric stratification conditions (u * = 0.8 m s−1, z i = 1,500 m) at 10 m height and 0.01 m roughness length for (a) flux and (b) concentration. The isolines represent 10–50% source area. Cross denotes the tower location

Footprint peak distance depending on measurement height. Curves are presented for range of roughness lengths under neutral stratification conditions and for two stability values for comparison with neutral case for z 0 = 0.01 m. ASL conditions are assumed
8.2.5 Large-Eddy Simulations for ABL
The Large-Eddy Simulation (LES) approach is free of the drawback of a predefined turbulence field. Using Navier-Stokes equations, LES resolves the large eddies with scales equal to or greater than twice the grid size, while parameterizing sub-grid scale processes (SGS). This approach presupposes that most of the flux is contained in the large eddies: since these are directly resolved, this method provides a high level of realism to the flow despite complex boundary conditions (e.g., Hadfield 1994). The Large-Eddy Simulation is a sophisticated model which directly computes the three-dimensional, time-dependent turbulence motions, and only parameterizes the sub-grid-scale motions (SGS). The choice of lateral and surface/upper boundary conditions is one of the aspects of this technique that is critically important and which depends on the application. In addition, in stable boundary layers, the errors due to an imperfect SGS become more important as the characteristic eddy size is smaller in stable conditions. This technique, applied for the first time to the atmosphere by Moeng and Wyngaard (1988), is considered the technique of choice for many cases not ordinarily studied using simpler models and can include the effect of pressure gradient.
Typically, LES predicts the three-dimensional velocity field, pressure, and turbulent kinetic energy. Depending on the purpose, it can also simulate the turbulent transport of moisture, carbon dioxide, and pollutants. There are several parameterizations available in treating the sub-grid scales. One of the most widely used simulations is that originally developed by Moeng (1984) and Moeng and Wyngaard (1988) and modified by Leclerc et~al. (1997), Su et~al. (1998), and by Patton et~al. (2001) for adaptation to include canopy and boundary-layer scalar transport.
Often, the SGS is parameterized using the 1.5 order of closure scheme. Depending on the research interest, the LES can contain a set of cloud microphysical equations, thermodynamic equation, and can predict the temperature, concentrations, and pressure. Some LES also include a terrain-following coordinate system. A spatial cross-average and temporal average is applied to the simulated data once the simulation has reached quasi steady-state equilibrium. Typical boundary conditions are periodic with a rigid lid applied to the top of the domain so that waves are absorbed and reflection of the domain from the upper portion of the domain is decreased. The LES is computationally very expensive and limited to relatively simple flow conditions by the number of grid points in flow simulations.
This powerful type of simulations has been used extensively in atmospheric flow modeling and in particular in convective boundary layers (Mason 1988). The technique has been used successfully to describe the influence of surface patchiness on the convective boundary layers at different scales (Hadfield 1994; Shen and Leclerc 1995).
The first attempt to apply LES approach for footprint modeling was made by Hadfield (1994). Further, the LES method has been applied to simulate footprints in the convective boundary layer (Leclerc et~al. 1997; Guo and Cai 2005; Peng et~al. 2008; Steinfeld et~al. 2008; Cai et~al. 2010). In some of the recent studies (Cai and Leclerc 2007; Steinfeld et~al. 2008; Cai et~al. 2010), the LES was used in conjunction with the Lagrangian simulation sub-grid scale turbulent dispersion to reproduce convective boundary-layer turbulence and infer concentration footprints. Steinfeld et~al. (2008) used LES to describe the footprint in boundary layers of different complexities. They documented positive and negative flux footprints in the convective boundary layer in a manner analogous to Prabha et~al. (2008a) in a forest canopy. This is consistent with Finnigan’s (2004) conclusion that the flux footprint function is a functional of the concentration footprint function and in complex flows there is no guarantee that the flux footprint is positive, bounded by zero and one. Wang and Rotach (2010) applied LES with backward Lagrangian stochastic approach over undulating surface and observed impact of flow divergence and convergence on footprint function for near-surface receptors. They observed that crosswind-integrated footprint function peak was located closer to receptor in the area with surface-wind convergence and was opposite in the area with wind divergence, respectively.
8.3 Footprint Models for High Vegetation
8.3.1 Footprints for Forest Canopy
The study by Baldocchi (1997) was first to address the footprint behavior inside a forest canopy by using LS modeling approach. He used literature-based parameterizations for turbulence vertical profiles inside the canopy and similarity relationships above the canopy (within this section we use “canopy” to refer to “forest canopy”). The influence of higher-order velocity moments on footprint prediction was not included in this study. However, one of the benefits of Lagrangian models is their capability to consider both Gaussian and non-Gaussian turbulence. While the flow within the surface layer is nearly Gaussian, non-Gaussianity characterizes flow fields of both canopy layer and convective mixed layer. Another benefit of Lagrangian stochastic models over analytical ones is their applicability in near-field conditions, that is, in conditions when fluxes of constituents are disconnected from their local gradients, providing thus proper description for within canopy dispersion. This makes it possible to locate trace gas sources/sinks within a canopy. Baldocchi (1997), Rannik et~al. (2000, 2003), Mölder et~al. (2004), and Prabha et~al. (2008a) studied qualitative effects of canopy turbulence on the footprint function. In the case of tall vegetation, the footprint prediction depends primarily on two factors: canopy turbulence and the source/sink levels inside the canopy. These factors become of particular relevance for observation levels close to the treetops (Shen and Leclerc 1997; Rannik et~al. 2000; Lee 2003; Markkanen et~al. 2003; Göckede et~al. 2007; Sogachev and Lloyd 2004).
Lee (2003, 2004) adopted a different approach for inside-canopy scalar advection modeling based on localized near-field theory and applied the model to footprint prediction over a forest canopy. The near-field effect had an impact on footprint prediction inside the roughness sublayer but could be neglected inside the inertial sublayer.
The wind statistics necessary for LS footprint simulations originate from similarity theory, experimental data, or an output from a flow model capable to produce wind statistics. However, the description of wind statistics inside a canopy becomes uncertain due to poor understanding of stability dependence of the canopy flow as well as of Lagrangian correlation time. In terms of parameterization of the value of the Kolmogorov constant C 0 it has been shown that the LS model results are sensitive to the absolute value of the constant (Mölder et~al. 2004; Rannik et~al. 2003). Poggi et~al. (2008) revealed that C 0 may vary nonlinearly inside the canopy while the LS model predictions were not sensitive to gradients of C 0 inside canopy.
In addition to LS approach closure modeling (cf. Sect. 8.4) and LES have been successfully applied to footprints inside and above a forest canopy. The clear benefit of these models is their ability to simulate complex canopy flows.
The versatility of the LES has been recognized as a potential tool to describe the flow over (Chandrasekar et~al. 2003) and near (Shen and Leclerc 1997) or inside very strongly sheared atmospheric flows such as within plant canopies (Su et~al. 1998; Shen and Leclerc 1997; Watanabe 2009) and urban canopies (Letzel et~al. 2006). Recently, LES studies have been applied to canopy turbulence and been shown to reproduce many observed characteristics of airflow within and immediately above a plant canopy, including skewness, coherent structures, and two-point statistics (Su et~al. 1998; Shen and Leclerc 1997; Prabha et~al. 2008a).
Concentrations and flux footprints have been studied using the LES, by examining the behavior of tracers released from multiple sources inside a forest canopy. Recently, the flux footprint over or inside the forest canopy using the LES has been modeled by Su and Leclerc (1998), Prabha et~al. (2008a), and by Mao et~al. (2008).
8.3.2 Footprint Dependence on Sensor and Source Heights
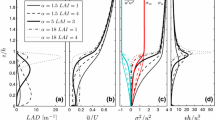
Rannik et~al. (2000), Markkanen et~al. (2003), and Prabha et~al. (2008a) highlighted the dependence of the footprint function on the vertical source location. This is of relevance in case of flux measurements over high vegetation, where exchange of many atmospheric consituents of wide interest (CO2) occurs mainly at the higher part of canopy. Figure 8.5 examines the influence of source height on footprint function. For this illustration, turbulence profiles in LS simulation of footprint functions were parameterized for pine forest according to measurements reported in Launiainen et~al. (2007). It can be seen that the footprint function peak is higher for elevated sources inside the canopy (Fig. 8.5a). The footprint funtion for measurements over forest at a typical height varies significantly depending on source location either on the forest floor or in the upper part of forest canopy. The footprint function for flux measurements above the forest floor inside trunk space is much more constrained.

(a) Flux footprints predicted for within-canopy wind statistics according to Launianinen et~al. (2007) by assuming source locations at the forest floor (Z s = 0) or at height 0.65× canopy height. (b) Cumulative footprints corresponding to (a). Observation levels z h −1 = 0.15, 1.5
8.3.3 Influence of Higher-Order Moments
The velocity distribution inside canopy is significantly skewed (Fig. 8.6). Leclerc et~al. (1991) examined the behavior of the vertical velocity skewness inside and above a forest canopy for a wide range of atmospheric stabilities, defined as the stability above the canopy, and found that non-dimensionalized vertical velocity skewness can be as large as −2. The trajectory model of Thomson (1987) enables to account only for Gaussian turbulence statistics. Flesh and Wilson (1992) developed a two-dimensional trajectory model able to account also for third and fourth moments. Since more than 1D Lagrangian trajectory models are not uniquely defined, the model of Flesh and Wilson (1992) was run for the comparison also with Gaussian parameterization of velocity distribution function. Non-Gaussian turbulence statistics tend to move the footprint peak further away from the measurement point, reducing the contribution from very close sources from below and around the observation point (Fig. 8.7). However, the integrals over horizontal distance (representing the fraction of flux contributed by the given horizontal distance) converge and the choice between the two trajectory models does hardly affect the estimate of the footprint extent.

Vertical profiles of higher moments: (a) skewness (Sk), and (b) kurtosis (K) of vertical (w) and along-wind (u) components (Rannik et~al. 2003)

Prediction of flux footprint pdf with Lagrangian stochastic trajectory model of Flesch and Wilson (1992), parameterized with Gaussian (G) and non-Gaussian (NG) turbulence profiles. 0.15, 0.3, and 1.5 refer to observation heights above forest surface normalized to forest height h, profiles parameterized according to Rannik et~al. (2003) and skewness and kurtosis as presented in Fig. 8.6
8.4 Complicated Landscapes and Inhomogeneous Canopies
8.4.1 Closure Model Approach
Often the estimation methods of ecosystem–atmosphere exchange rely on horizontal homogeneity. Nevertheless, the assumption of spatial homogeneity is rarely met within most natural ecosystems and airflow passing through and over them is essentially two- or three-dimensional, leading to advective transport occurring besides the turbulent transfer. The large and often undetermined uncertainty of ecosystem–atmosphere exchange derived by single-point micrometeorological measurements has become one of the most important topics of methodological micrometeorology (e.g., Rannik et~al. 2006). Capturing of advection and horizontal flux components at imperfect sites requires auxiliary experiments and cannot yet be routinely performed (e.g., Aubinet et~al. 2003, 2005). Numerical modeling has been recognized as an effective and flexible tool in the investigation of spatially dependent complex processes, providing supplementary information on variables of interest, generally overlooked in field measurements.
As airflow mediates the biosphere–atmosphere exchange and coupling, the first step toward understanding the role of advection in exchange processes over complex terrain is characterizing wind flow. Over the last 30 years, different modeling approaches to simulate vegetation–atmosphere interaction have been applied to horizontally homogeneous canopies, and these form a basis for more complex flows. It has became clear that for any model that aims to adequately simulate the airflow over heterogeneous surfaces, the turbulence length scale, l, must be calculated as a dynamic variable (e.g., Ayotte et~al. 1999; Finnigan 2007). For practical applications (such as footprint estimation), where information on higher-order statistics of turbulent flows is superfluous, the approach based on two-equation closure (see below) seems to be the optimal choice for modeling of such flows since second- and higher-order closure models (e.g., Rao et~al. 1974; Launder et~al. 1975) or Large-Eddy Simulation (e.g., Deardorff 1972; Moeng 1984) providing a practical framework for computing these statistics are computationally more demanding. The approach based on differential transport equations for the turbulent kinetic energy (TKE) E, and for a length scale determining a variable related to E (that is more often one of the following parameters: El, ε, or ω – the product of E and l, the dissipation rate of E, or the specific dissipation (ε/E), respectively), provides the minimum level of complexity that is capable of simulating l without any additional speculation (e.g., Launder and Spalding 1974; Wilcox 2002; Kantha 2004). Although having a number of well-known deficiencies, two-equation closure has still been used in industrial computations for a long time and has proved to be an excellent compromise between accuracy and computational effort (see Hanjalić 2005 or Hanjalić and Kenjereš 2008 for a review). During the last two decades, models using two-equation closure have attracted great attention in the geophysical modeling community and a number of authors have found it is sufficient for most practical tasks (Wang and Takle 1995; Umlauf and Burchard 2003; Castro et~al. 2003; Hipsey et~al. 2004; Katul et~al. 2004). Applications of this approach to atmospheric and oceanic flows have highlighted, however, serious uncertainties in the treatment of buoyancy and plant drag effects (e.g., Duynkerke 1988; Svensson and Häggkvist 1990; Apsley and Castro 1997; Wilson et~al. 1998; Baumert and Peters 2000; Kantha 2004; Sogachev and Panferov 2006). Recently, Sogachev (2009) showed how different sources/sinks appearing in the turbulent kinetic energy equation due to these effects can be treated in the supplementary equation in such a way as to minimize the uncertainty. This gives new opportunities in the use of two-equation closure models for environment problems. However, some types of models (e.g., E–El) have problems with properly reproducing the log-law region near wall unless extra terms are included (e.g., Kantha 2004). Application of such models to the canopy and planetary boundary layer could be limited; for example, determination of the near-wall term in the presence of vegetation could be difficult similarly to determination of l (see, for discussion, Sogachev and Panferov 2006).
A natural question demanding more careful consideration is still an ability of such models based on gradient-diffusion scheme to describe adequately turbulence under conditions of unstable stratification and inside of vegetation. Discussions on this question with reference to vegetation repeatedly rose in scientific literature (Sogachev et~al. 2002; Katul et~al. 2004; Sogachev et~al. 2008). Here we summarize the main points. Central to any first or one-and-half order closure model is a simple relationship used for the description of the turbulent exchange within the vegetation, namely K-theory where the mean turbulent flux (F s ) is related to the mean concentration (C) gradient as follows:
Here z is the height and K s(z) is the local eddy diffusivity for c s. A number of investigators have noted, however, that K-theory may be inadequate for description of turbulent fluxes from local gradients within the canopy due to strong variability in the sources and sinks of any scalar s, and due to the possible occurrence of countergradient transfer (Denmead and Bradley 1985; Raupach 1988; Finnigan 2000). Nevertheless, researchers still consider models based on gradient-diffusion approximation to explore disturbed flows (Gross 1993; Wilson et~al. 1998; Wilson and Flesch 1999; Pinard and Wilson 2001; Katul et~al. 2004, 2006; Sogachev and Lloyd 2004; Foudhil et~al. 2005; Sogachev and Panferov 2006). This is in part due to the fact that keeping the number of equations and necessary constants to a minimum provides a significant computing profitability over other methods which can reproduce nonlocal, nondiffusive behavior in the Eulerian framework such as Large-Eddy Simulation (LES) (Shaw and Schumann 1992; Shen and Leclerc 1997) and higher-order closure (Wilson and Shaw 1977, Meyers and Paw 1986) models. Most importantly, however, there is a distinct dynamical support to describe the behavior of strongly perturbated canopy flows as is the case for flows near the transition between a forest edge and an open forest gap (Wilson et~al. 1998; Belcher et~al. 2003) or on hills (Finnigan and Belcher 2004).
Thus, near the forest edge, most of the flow distortion initially is dominated by inertial effects, resulting in large advective terms (Belcher et~al. 2003). These lead to reduction in K which is not offset by the new energetic small-scale eddies generated as the flow encounters the foliage. Hence, these eddies have a small integral length scale and the “near-field” effect (a nondiffusive contribution from nearby sources) associated with them is localized. Thus the basic requirement of K-theory – that the length scale of the mixing process needs to be substantially smaller than that of the inhomogeneity in the mean scalar or momentum gradient – is not violated here (Corrsin 1974). Airflow over hill is different from that near forest edge but it also leads to distortion and breaking up of large eddies and using K-theory is admissible (Wilson et~al. 1998; Katul et~al. 2004).
A common conclusion from above was expressed by Gross (1993), who found that the application of the flux-gradient approach by two-dimensional and three-dimensional-modeling is admissible, in particular, in simulations for which advective processes are of greater importance than diffusive processes. Such situations are typical for inhomogeneous vegetation and complex terrain. Regarding diffusion process that is always present irrespective of advection, we note that for the forward problem, which is considered when we are looking for flux footprint, the objective is to calculate fluxes from the canopy and underlying surface to a reference point. In this case, “near-field” dispersion provides distortions to the local concentration profiles within the canopy but does not contribute substantially to the transport between the canopy layers and the reference point (Raupach 1989; Katul et~al. 1997; Leuning et~al. 2000).
8.4.2 Model Validation
All numerical results presented below were derived using ABL model SCADIS based on one-and-half order closure with different closure schemes during different stages of model development. The last version of model is based on E–ω closure scheme, modified according to Sogachev (2009). There exists a variety of experimental data about airflow characteristics inside the vegetation canopy. As a rule, such data have been derived from single-point measurements. In the literature one can find many models of different levels of complexity (including analytical ones) for the canopy flow that is mainly validated by using such data. Applicability of those models is justified for homogeneous conditions but is rather questionable for heterogeneous ones. There are few natural experiments exploring turbulence characteristics spatially, that is, in vicinity of forest edge (Cash 1986; Kruijt 1994; Irvine et~al. 1997; van Breugel et~al. 1999; Flesch and Wilson 1999; Morse et~al. 2002). The lack of the experimental data limits seriously a development of high-resolution flow models capable to take into account the natural heterogeneity. Nevertheless, the results of recent model tests over a wide range of canopy architectures by Sogachev and Panferov (2006) suggest that the model SCADIS can adequately reproduce the interaction between the flow and the forest edge. Thus, the behavior of the turbulence scale and the turbulence field as predicted by our two-equation model is in qualitative agreement with the description suggested by Belcher et~al. (2003) (see above) and corresponds to that experimentally obtained by Krujit (1994) and by Morse et~al. (2002) (see Fig. 8.8).

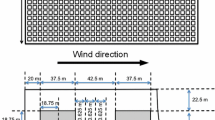
Two-dimensional fields of horizontal wind velocity (U), mixing length (l), and turbulent kinetic energy (TKE) near the leading edge of a forest derived by E – ω model. The thick dashed line encloses the forest approximated by vertically uniform vegetation with a height of 15 m and LAI = 3. The horizontal distance is normalized by the tree height, x/h. Here and in figures below the airflow from the left to the right (After Sogachev and Panferov 2006)
Comparison of model results with observations of Chen et~al. (1995) for turbulent kinetic energy in wide gap downwind of the model forest derived from wind tunnel study shows that the model also deals well with the readjustment of the turbulence field on the lee side of a forest (see Fig. 8.9).

Comparison between vertical profiles of measured (symbols) and modeled (lines) turbulent kinetic energy (TKE) downwind the model forest edge. The position at x/h = 0 corresponds to the beginning of the open place (After Sogachev and Panferov 2006)
There are differences between airflow above smooth and rough ridge. Belcher and Hunt (1998) pointed out that higher roughness of the ridge or larger wind shear of the approaching flow enhances the stress perturbation so that separation tends to occur at smaller slopes. Model results for airflow over two different ridges – one with relatively smooth surface and another covered by homogeneous forest – are demonstrated in Fig. 8.10. Comparing the left-side and the right-side panels of Fig. 8.10, it can be seen that separation occurs for a ridge with a large surface roughness, whereas there was no separation for the ridge with small surface roughness. This is in good agreement with the conclusion of Belcher and Hunt (1998). As is seen, the model reproduces qualitatively the most significant flow features of hilly terrain (Raupach and Finnigan 1997) and is therefore suitable for preliminary investigation of both scalar dispersion and footprint behavior in complex terrain.

Isolines of the stream function for neutral stability airflow over a ridge having a relatively smooth surface (soil with surface roughness assumed to be z 0 = 0.3 m) (the left panel) and having a rough surface (forest) (the right panel). The height of the forest was assumed to be 20 m (denoted by the dashed line) with LAI = 2.4 m2 m−2. Aerodynamic drag of the forest and the flow through the forest were considered. The topography variations are shown by black area. Arrows show the direction of the airflow (After Sogachev et~al. 2004)
8.4.3 Footprint Estimation by Closure Models
The spatial distribution of sources and sinks within plant canopies is strongly heterogeneous and depends on vegetation properties and prevailing meteorological conditions. However, such details regarding the distribution of local sources and sinks are not needed for many practical tasks. To interpret experimental data correctly it is often sufficient to know the footprint of the measurement with some finite horizontal resolution; this being sufficient to identify the contribution of the main vegetation types to the measured flux.
Thus assuming that the vertical scalar flux measured by a sensor at a given point can be estimated by Eq. 8.9, we can then find the integral contribution of each model cell to that measurement from modeled fields of scalar concentration and turbulent diffusion. When using SCADIS there are two nearly equivalent techniques (difference can be caused by boundary conditions at simulation domain) to estimate the contribution of any model cell to the measured vertical flux at a prescribed location. These are presented schematically in Fig. 8.11.

Methods of estimation of source weight function by means of the numerical model; “i” indicates a model grid cell within a domain of I gridcells, “k” is the investigated grid cell (measurement point), “Z1” and “Z2” are the heights for which the footprint is estimated. The dashed areas depict high-intensity areas of vertical scalar flux (After Sogachev and Lloyd 2004)
According to the first technique (I) the contribution of a given cell to the measured vertical flux at point (k,Z) is determined by excluding all sources and sinks in the investigated cell (e.g., i = 3 in Fig. 8.11a). The alternative approach (II) is complementary where all sources and sinks in the model domain are excluded (1,I) except for those within the investigated cell (e.g., i = 3 in Fig. 4b). The bulk vertical flux at point (k,Z) is then calculated by summing up the result of the individual calculations for each cell (Fig. 4c). Taking the total contribution of all cells to bulk flux as unity it is then possible to estimate the influence (or weight) of each cell and, therefore, define the flux footprint function.
In the current modeling approach, it is difficult to predefine equal source strength inside all grid cells, especially over complex terrain. This is because complex topography and varying tree compositions with different height and density will change aerodynamic resistance and stomatal conductivity in unpredictable manner. Therefore, modeling approach is needed for normalization of sources for each grid cell to get uniform distribution of sources for footprint estimation. The major problems with this approach occur when the cells next to inflow lateral border have significantly different source/sink strengths to each other or if the inflow lateral border of the model is not far enough from point (k). This is because the source/sink from the inflow border cell (i = 1) mostly defines the model background flux as the contribution to point (k,Z) from outside of the model domain. So any sudden changes in inflow conditions can result in uncertain footprint prediction.
These problems can, however, be overcome by imposing the mean canopy properties onto several inflow cells or by having the inflow border at a sufficient distance from estimated measurement point. Some guidance for the appropriate distance can be obtained from analytical footprint models. An irregular horizontal grid with a model step that increases as one moves away from the measurement point also helps to solve the problem with lateral border conditions, especially for two-dimensional model domains, and without significantly increasing computational requirements.
It should be noted that the footprint estimation for fluxes where the source or sink strength is dependent on specific surrounding conditions (e.g., photosynthetic activity and ambient CO2 concentration) are, however, slightly incorrect as advective terms are ignored. Footprint estimation taking into account the upwind influences is relatively simple for the two-dimensional model when using the cumulative technique (CT). This approach is illustrated in Fig. 8.11d. The contributions of model cells to the flux at the investigated measurement point are estimated by this approach as follows. First the source/sink influence of an inflow border cell (i = 1) is estimated when for all other cells (i = 2,I) all sources/sinks are not active. Then the sources/sinks in the next downwind cell are activated and the joint influence of the two cells is estimated. Then the sources/sinks in the next downwind cell are activated (i = 1,3) and so on until the value of bulk flux in investigated point is reached as a result of the joint influence of all upwind sources/sinks (i = 1,k). After that it is easy to derive the cumulative flux for each upwind cell from numerical data. The derivative of this cumulative flux function is the footprint. This technique is much more difficult or even impossible to implement for three-dimensional conditions because of very complicated upwind conditions. So for full three-dimensional simulations it is assumed that the source/sink strengths of different cells are independent of each other with the exception of the upwind boundary cell. The resultant flux at the investigated (measurement) point is then a result of superposition of flux fields produced by all cells. According to this assumption the first two techniques of footprint modeling are equivalent.
According Sogachev and Lloyd (2004) the “footprint function” as calculated by above-described techniques does not strictly adhere to the footprint definition, for which footprint function should depend only on turbulent diffusion and source-receptor location. Rather, it represents a normalized contribution function (or “source weight function”), where variations in the horizontal distributions of fluxes will by definition also give rise to a variation in estimated footprint function. In case of horizontally homogeneous source/sink field our normalized contribution function is effectively equivalent to a footprint function and is thus referred to as such.
There are no general criteria guiding the validation of footprint models. Only a handful of validation experiments are available (see Foken and Leclerc 2004). Therefore, the approach of footprint estimation based on SCADIS was mainly validated using comparison with other approaches. Footprint functions modeled by SCADIS were compared with footprints derived from both analytical and Lagrangian stochastic approaches for condition of uniform surface (e.g., Schuepp et~al. 1990; Leclerc and Thurtell 1990; Kormann and Meixner 2001). The best agreement was obtained in neutral conditions. In Sogachev et~al. (2005a), additional proofs of credibility of the closure approach were given by a comparison of footprints predicted by SCADIS and two different LS models (Thomson 1987; Kurbanmuradov and Sabelfeld 2000) (see Fig. 8.12). Figure displays footprint predictions derived by different models for the same flow conditions over homogeneous vegetation. The vegetation was presented by slash pine managed forest in Florida (Leclerc et~al. 2003a). The forest has a closed canopy with an average height of 13.5 m and LAI of about 3. SCADIS footprints exhibit very close values compared to Lagrangian stochastic (LS) model results.

Predictions of flux footprint with the Lagrangian stochastic trajectory simulation of Thomson (1987) (LS-TH) and Kurbanmuradov and Sabelfeld (2000) (LS-KS), and SCADIS model estimations of flux footprints above a managed forest plantation in Florida (z = 1.4 h) in neutral conditions (After Sogachev et~al. 2005a)
8.4.4 Footprints over Complex Terrain
The main advantage of the approach for footprint estimation based on closure models is that it does not rely on the assumption of spatially homogeneous vegetation. Therefore, it could be successfully applied for a wide range of practical tasks like the choice of optimal sensor position for flux measurements over complex terrain, or for the data interpretation from existing measurement sites.
The approach has been applied to estimate footprints for existing flux measurement sites in Tver region (European Russia) (Sogachev and Lloyd 2004) and Hyytiälä (Finland) (Sogachev et~al. 2004), taking into account mainly the vegetation heterogeneities in the first case and complex topography in the second. Applications of the method to real sites lead us to several interesting observations. For example, for a mixed coniferous forest in European Russia on a plain relief a marked asymmetry of the footprint in the crosswind direction was observed, this being especially pronounced for nonuniform plant distributions involving vegetation types with different morphological and physiological properties (see Fig. 8.13). It was also found that, other factors being equal, for above-canopy measurement sensor, the footprint peak for forest soil respiration is typically over twice the distance as compared to that for canopy photosynthesis. This result has important consequences for interpretation of annual ecosystem carbon balance estimations with the eddy-covariance method. The study of the Hyytiälä site revealed the effects of topography on scalar concentration and flux fields within the atmospheric surface layer. The fluxes at a fixed height vary as a function of position in respect of topography. The fluxes tend to be larger at the upwind foot of the ridge and at the downwind side of the ridge crest, being smaller downhill. Correspondingly, the flux footprints depend on the location of the flux measurement point and may significantly deviate from those for a flat terrain.

Examples of footprint predictions for two different directions of surface wind and time points at three heights above forest canopy. (a) – west wind; upper panel for 3.00 LT (L ≈ 50 m), down panel – 15.00 LT (L ≈ −120 m). (b) – north wind, 15.00 LT (L ≈ −120 m). The dashed quadrate at all panels indicates the location of measuring tower. Arrow indicates the surface wind direction. Numbers of per cent indicate total contribution from model domain to measured flux. Colors of each type correspondent to colors of vegetation type approximation in domains (white – birch; different grey for different spruce stands) (After Sogachev and Lloyd 2004)
Vertical fluxes and footprint behavior over a few simplified landscape types were investigated by Sogachev et~al. (2005b). Hypothetical heterogeneous vegetation patterns – forest with clear-cuts as well as a hypothetical heterogeneous relief, a bell-shaped valley, and a ridge covered by forest – were considered. The disturbances induce changes in scalar flux fields within the atmospheric surface layer compared to fluxes for homogeneous conditions: at a fixed height the fluxes vary as a function of distance from disturbance. Correspondingly, the flux footprint estimated from model data depends on the location of the point of interest (flux measurement point). This study demonstrated mainly that any generalization of the footprint and flux behavior as a function of landscape heterogeneity is still a challenging task due to their site specificity.
The behavior of both scalar fluxes and flux footprints near a forest edge were investigated in detail for the Florida AmeriFlux site (Sogachev et~al. 2005a) and Bankenbosch forest in the Netherlands (Klaassen and Sogachev 2006). The former study examined the influence of bare soil patch located upwind of the eddy-covariance tower on fluxes in a forest plantation. Scalar fluxes and flux footprints from a clear-cut–forest transect with swaths of logged land with dimensions varying with wind direction were modeled (see Fig. 8.14). In sharp contrast with momentum fluxes, the magnitudes of CO2 and scalar fluxes were found to be sensitive to clear-cut width. The adjustment to new underlying scalar flux values as a function of distance from the leading forest edge appeared to be far greater for scalar fluxes than for momentum fluxes. This result is consistent for all modeled clear-cut swaths – forest canopy interfaces, suggesting that CO2 flux measurements using the eddy-covariance technique require a larger fetch for forest flux towers than previously thought. The footprint analysis indicated flux contributions from the clear-cut, forest floor, and forest canopy to the tower flux hundreds of meters downwind of the clear-cut–forest interface and highlighted the need for caution in the interpretation of data away from the leading forest edge (up to 30 canopy heights) (Fig. 8.14). This is especially true when the strengths of both surface and in-canopy sources are of comparable magnitude.

Examples of net footprints (joint contribution of sources located within the canopy layer and on the soil surface are considered) derived by the model for a case of 17 h wide clear-cut for sensors located at various normalized distances, x/h downwind of the forest edge at a height of 1.4 h (After Sogachev et~al. 2005a)
The study of Klaassen and Sogachev (2006) showed in addition that with increasing forest density, atmospheric fluxes deviate even more strongly from surface fluxes, but over shorter fetches. It was concluded that scalar fluxes over forests are commonly affected by inhomogeneous turbulence over large fetches downwind of an edge. It is recommended to take horizontal variations in turbulence into account when the footprint is calculated for atmospheric flux measurements downwind of a forest edge. The spatially integrated footprint is recommended for describing the ratio between the turbulent flux above forest and the average surface flux in the source area.
The knowledge of the footprint itself considerably improves our ability to decompose a flux signal into its different source signatures. However, Sogachev et~al. (2005b) pointed out that for establishing and locating the flux towers, the information provided by the footprint function is more convenient if presented in a different form. They introduced fractional flux function describing the contribution of given source into a signal at that imaginary flux tower. Figure 8.15 compares these fractional flux functions for measurement height z = 1.4 h obtained for the different modeled clear-cut sizes. The behavior of these functions depends on the flow structure in the clear-cut–forest transition zone, which in turn is defined by the canopy structure. The flow acceleration in the lower canopy and above, the flow deceleration in the upper canopy region together with the vertical air motions, all occurred in this zone resulting in a complicated distribution of the scalar field and vertical fluxes. With information on fluxes from the soil in clear-cut and forest areas (as might be seen during nighttime conditions with upward CO2 fluxes, for example) and from the forest canopy, net fluxes at given height downwind of the forest edge can be estimated.

Variation of the fractional flux functions at a height of 1.4 h with normalized distance, x/h downwind of the forest edge, derived by footprint modeling for sources on forest floor, inside a tree layer and on the clear-cut. These functions describe the contribution of corresponding sources to a measured signal at an arbitrary location downwind of the clear-cut–forest edge (After Sogachev et~al. 2005a)
Both studies suggested that, to improve our current assessment of net carbon uptake, attention should be given to the importance of careful tower location selection in a landscape characterized by a mosaic of surface properties as observed in most natural ecosystems. For towers located in complex terrain, the approach based on two- and three-dimensional flow model capable of taking into account heterogeneity of surface is strongly recommended for footprint estimation. The interpretation of the eddy-covariance flux measurements over Lake Valkea-Kotinen in the framework of Helsinki Environment Research Centre (HERC) project (Vesala et~al. 2006) is a practical example confirming the adequacy and usefulness of this approach.
8.4.5 Modeling over Urban Areas
Recently, Vesala et~al. (2008a) successfully implemented this method for estimation of footprint for measuring tower surrounded by complex urban terrain. Besides the above example for Tver region (European Russia) (Sogachev and Lloyd 2004), it is a second attempt of footprint prediction in three-dimensional landscape reported in the literature. Performed footprint analysis allowed for discrimination of the influence of surface and canopy sinks/sources and complex topography on observed fluxes. The heterogeneity of urban surface results in complex transport from sources to receptor and the footprint signature was asymmetric along prevailing wind direction. Thus, any two-dimensional footprint models (especially based on analytical solutions) should be avoided for urban surrounding even with flat topography. Jarvi et~al. (2009) applied also the ABL model for estimation of footprint over urban areas including the effect of real urban structure on the flow. In simulations, land use was classified into nine different types including roads, parking areas, soil, and trees with two different height classes, and buildings with four different height classes. Buildings were considered to be impenetrable. The footprint calculation was made for the road sector with the surface wind from a direction perpendicular to the road, and a geostrophic wind speed of 10 ms−1. Neutral stratification of the atmosphere was assumed. The cell size used in the simulation was 20 × 20 m2. The airflow at the height of 10 m above surface and flux footprint for ground sources and for the sensor located at the height of 31 m are presented in Fig. 8.16.

Aerial photograph of the measurement location. Topography of the measurement site (relative to sea level) is denoted by black contours. Wind vector plots (a) and the flux footprint function (b) (scale 10−6, the unit of flux footprint is m−2) are shown when the wind direction is perpendicular to the road (117°), Geostrophic wind speed is 10 m s−1 and the boundary layer is neutrally stratified. The location of the measurement tower is marked by a white star, and its distance to the edge of the road is around 150 m (After Jarvi et~al. 2009)
The flow pattern was strongly affected by buildings, and therefore the footprint function of the surface fluxes showed a complex pattern, unlike the smooth pattern characteristic of horizontally homogeneous conditions. In fact, the function had two local maxima, one close to the measurement tower and another at a distance further upwind. Model simulations also indicated that the footprint function was highly sensitive to wind direction.
There are only a few attempts presented above to estimate footprint over urban area. However, over complex topography and heterogeneous terrain, the only possible way to estimate the influence of surface sources on the measured flux is through the use of numerical calculations.
8.5 Quality Assessment Using Footprint Models
The application of the eddy-covariance technique to monitor turbulent exchange processes between surface and atmosphere is restricted to basic theoretical assumptions, the most important of which are steady-state flows, a mean vertical wind component of zero, and non-advective conditions (e.g., Foken et~al. 2004; Foken 2006; Kaimal and Finnigan 1994). Deviations from these assumptions will increase measurement uncertainty, and thus have a negative impact on overall data quality (see also Chap. 4). Heterogeneity in the area surrounding an eddy-covariance measurement site, such as clearings in a forest, fields with different crop types in an agricultural area, or obstacles like buildings or trees in an otherwise open grassland, holds the potential to disturb the atmospheric flow, and trigger the above-mentioned deviations from ideal conditions that cause data quality to decrease (e.g., Baldocchi et~al. 2005; Panin and Tetzlaff 1999; Schmid and Lloyd 1999). Evaluating the influence of such terrain heterogeneity on eddy-covariance measurements through footprint modeling can, therefore, serve as an important component in the overall eddy-covariance data quality assessment strategy (Foken et~al. 2004).
In recent years, the growing number of eddy-covariance sites organized in networks such as FLUXNET (Baldocchi et~al. 2001), CarboEurope (Valentini et~al. 2000), or Ameriflux (Law 2005), lead to a shift from ideal, homogeneous sites to complex and heterogeneous conditions (e.g., Schmid 2002). To facilitate coverage for a wide range of ecosystems many sites had to be established in heterogeneous areas with variable land cover types, since there had to be a compromise between the ecological importance of a new site and the suitability of the surrounding environment for high-quality eddy-covariance measurements. Accordingly, there is a strong interest in methods and applications that can link quality features in the measured data with characteristics of the surrounding terrain. Such efforts are particularly valuable for the increasing number of FLUXNET synthesis studies (Grant et~al. 2009; Luyssaert et~al. 2008; Stoy et~al. 2009) that pool observations from multiple sites to generate, for example, products representative for larger scales.
As a diagnostic quality assessment tool for existing databases, footprint analyses can generally be applied in three different areas:
-
Testing the spatial representativeness of the measured fluxes. Footprint model results can reveal the composition of different land cover types, different forest age classes, etc., in the fetch of a measurement (Göckede et~al. 2004, 2006). This information can be used to characterize the variability in the flux time series that is caused by a changing field of view of the sensors, and ideally the total flux can be decomposed into flux contributions from different biomes (Barcza et~al. 2009; Soegaard et~al. 2003; Wang et~al. 2006). If data from a homogeneous flux source are required, for example, to train a model for a specific biome like conifer forest, the footprint filter can indicate which measurements provide the “true” forest signal, and which are “contaminated” by, for example, clearings or water bodies (Göckede et~al. 2008; Rebmann et~al. 2005). A test for spatial representativeness is also necessary to link eddy-covariance measurements to data at different spatial resolution, such as upscaling to remote sensing information grids (Chen et~al. 2008; Kim et~al. 2006; Reithmaier et~al. 2006) or aircraft data (Kustas et~al. 2006; Ogunjemiyo et~al. 2003), or downscaling for comparison to soil chamber measurements (Davidson et~al. 2002; Myklebust et~al. 2008; Reth et~al. 2005).
-
Linking data quality to terrain features. Eddy-covariance data quality assessment results, as, for example, outlined in Chap. 4, can be linked with footprint analyses to produce spatial maps of the data quality (Göckede et~al. 2004, 2006, see below for details) These maps hold the potential of identifying general instrumentation problems, disturbed wind sectors under different conditions of atmospheric stability, or even the influence of single obstacles in the near field of a sensor. Potential effects will show up as structures in the spatial maps, for example, a single wind sector with reduced data quality for a specific atmospheric stability regime. Such structures are often caused by subtle trends which might easily be missed in a standard database filter. Such “bad” situations can be flagged to strengthen the database.
-
Visualize spatial structures in ancillary parameters. In the same way as outlined above for the data quality, in principle any measured parameter (scalars and fluxes) can be linked with the footprint analyses to produce spatial maps. A classic example for this application would, for example, be the visualization of spatial structures in the mean vertical wind component (Göckede et~al. 2008). Other examples include visualizing the flux fields sensible or latent heat, which may indicate spatially variable sources for these parameters.
In addition to analyzing existing datasets in a diagnostic way, footprint modeling can also be applied in a “predictive” way to assist in the planning of new meteorological experiments. Using either hypothetical or measured wind climatology datasets, the instrument position can be optimized by, for example, maximizing the influence of fluxes from the biome intended to monitor, and/or minimizing the influence of potential obstacles in the fetch of the sensors.
8.5.1 Quality Assessment Methodology
A comprehensive quality assessment framework to include footprint analyses into eddy-covariance data quality assessment schemes was first introduced by Göckede et~al. (2004). Their approach, which built on an analytic flux footprint model (FSAM, Schmid 1994, 1997), addressed all three general quality assessment areas listed above, and was successfully applied by Rebmann et~al. (2005) to 18 sites of the CARBOEUROFLUX network. An upgraded version of this framework (Göckede et~al. 2006), which aimed at a more reliable performance and broader applicability, replaced the analytic footprint model by a forward Lagrangian stochastic (LS) trajectory model (Rannik et~al. 2003). This software tool provided the results for an extensive quality control study of CarboEurope-IP data (Göckede et~al. 2008) that summarized findings from 25 forested sites.
To ensure representative findings, footprint analyses for data quality assessment should use a database of several months (at least 2–3) of meteorological measurements, so that several thousand half-hourly averaged observations are available. The correct interpretation of the findings relies on a good sample of the local wind climatology, and sufficient coverage of different atmospheric stability conditions for all wind sectors. The analysis will be strengthened by choosing a database that covers a period of the year with high absolute values of exchange fluxes between surface and atmosphere. Concerning the required gridded maps of the terrain characteristics such as land cover type or stand age, the spatial resolution as well as the number of classes assigned only play a minor role as long as the map resolves those details in the surrounding terrain the specific study is aiming at (Reithmaier et~al. 2006). For example, coarse resolution maps might be sufficient for studies that simply differentiate between generic forest and the non-forest areas beyond the forest edge, while finer resolution maps will be required if also patches of coniferous, deciduous, and mixed forest need to be resolved, or the forest is interspersed by small clearings. Overall, the quality of the footprint results tend to improve through the use of more detailed, remote sensing based map material.
An integral part of footprint-based quality assessment approaches is the average source weight function for a longer measurement period, the so-called footprint climatology (e.g., Amiro 1998). It is obtained by summing up the source weight functions of individual 30-min measurements over a longer period of time, and thus reflects the local wind climatology and the distribution of different classes of atmospheric stability on the long-term measurement conditions. Figure 8.17 demonstrates the variability of footprint climatologies under different stratification regimes, highlighting also the change in the composition of land cover types within the footprint with varying conditions. In these two-dimensional visualizations, the white effect level rings indicate the three-dimensional topography of the footprint climatologies, with the most influential terrain areas located in the center of the concentric rings.

Top-down view on footprint climatologies (white lines), accumulated for different regimes of atmospheric stability, obtained for the Weidenbrunnen tower in southeastern Germany. Panels give footprint climatologies for all cases (top left), unstable (top right), neutral (bottom left) and stable (bottom right) stratification. Values are in percentages to the peak of the function, with solid lines ranging from 90% to 10%, and the dashed line as 5% of the maximum. High values indicate a high relative contribution of the specific area to the fluxes measured in the given observation period. Colors in the background indicate land cover classes. Distances to the tower position (red cross) are given in [m]
For the evaluation of the spatial representativeness of an eddy-covariance flux dataset, footprint climatologies merged with land cover maps as shown in Fig. 8.17 already provide a first impression on the potential impact of terrain heterogeneity on the observations. The most prominent land cover classes within the area encircled by the white isolines will also dominate the flux measurements. “Disturbance elements,” such as clearings in a forest, will have a higher impact on the dataset the closer they are situated to the center of the concentric effect level rings. For a more detailed analysis, each 30-min source weight function has to be projected onto the gridded land cover map, assigning a weighting factor to each grid cell that represents its relative contribution to the actual measurement. The distribution of flux contributions from the different land cover types can then be obtained by accumulating these weights sorted by land cover type. Application on a larger dataset reveals patterns in the composition of the footprint that are dependent on wind sector and stability regime. This information is particularly valuable in case a dataset is supposed to represent a certain “target land cover type,” for example, for a site intercomparison, or the training of an ecophysiological model. For such applications, the footprint results can be used to provide the percentage contribution of the specified target land cover type to the total flux, and measurements that fail to reach a user-specified minimum threshold can be discarded from the database (e.g., Nagy et~al. 2006).
For network intercomparison studies such as presented by Rebmann et~al. (2005) or Göckede et~al. (2008), it is recommended to classify the homogeneity of flux sources within the source area by defining thresholds of target area flux contributions. Göckede et~al. (2008) defined four different classes:
-
Homogeneous measurements, with 95% or more of the flux emitted by the target land cover type
-
Representative measurements (80–95%)
-
Acceptable measurements (50–80%)
-
Disturbed measurements (<50%)
For a site intercomparison, it can then be determined what percentage of the total dataset at each site could, for example, be classified as homogeneous or representative measurements, which can serve as an indicator of how well the sites could be compared, or how suitable they are for model training focusing on a specific biome.
For the second way of applying footprints in eddy-covariance quality assessment, linking data quality to terrain features, the footprint results need to be coupled to approaches evaluating the flux data quality of the measurements. The specific method to assign flux data quality, as well as the definition and resolution of quality classes, can be chosen by the user and customized for each study, as long as the quality ratings are numeric to allow aggregation. Göckede et~al. (2006, 2008) applied a scheme proposed by Foken and Wichura (1996) in the revised version as presented by Foken et~al. (2004), which assigns quality flags between 1 (best) and 9 (worst) for the fluxes of momentum, sensible and latent heat, and CO2. To create spatial maps of the data quality, the quality flags for each individual 30-min measurement are projected onto a discrete grid, storing relative influence and quality flag results for each grid cell in a database. After processing the entire dataset, this information can be converted into a frequency distribution of data quality for each cell, which in turn yields the overall quality rating as the median of the distribution (see Göckede et~al. 2004, 2006 for details). Visualization of the results helps in revealing spatial patterns in data quality, such as isolated wind sectors with significantly reduced quality ratings compared to neighboring regions (Fig. 8.18). Such patterns may, for example, hint at terrain structures in that specific wind sector which has a negative impact on atmospheric measurement conditions, or might be caused by flow distortion induced by the instrumental setup. Observations of multidirectional reduction in data quality for specific subsets of the measurements (Fig. 8.19) can indicate instrumental problems, such as water in the tubing of a closed-path infrared gas analyzer that only precipitates during lower temperatures at night. Whatever the cause of the reduced data quality, affected wind sectors or stability regimes can be flagged and removed from the database to improve overall data quality.

Example for an isolated wind sector with reduced data quality, taken from Göckede et~al. (2008). Background colors give the median quality rating (1 = best) of the momentum flux during stable stratification (z/L > 0.0625; z: measurement height [m]; L: Obukhov length [m]) at the Wetzstein site in central Eastern Germany (See caption of Fig. 8.17 for further details)

Comparison of the spatial data quality of the latent heat flux (left panel) and the CO2 flux (right panel) during stable stratification, taken from Göckede et~al. (2008). Background colors give the median quality rating (1 = best) obtained for the Soroe site in Denmark (See captions of Fig. 8.17 for further details)
For the visualization of spatial structures in ancillary parameters, the procedure resembles the one described above for quality flag analysis, only that observational data such as the mean vertical wind speed or the friction velocity replace the data quality ratings. This application allows exploring spatial effects for a large number of parameters which hold the potential to help interpret cases of low data quality, or identify instrumental problems. An example of this type of analysis included into the framework by Göckede et~al. (2006) is the visualization of spatial structures in the vertical wind component before and after application of the Planar-Fit coordinate rotation (Wilczak et~al. 2001). These results indicate tilt and distortion of the initial wind field, and the effectiveness of the coordinate rotation to correct the flow conditions to a mean vertical wind of zero, as required for eddy-covariance measurements. Figure 8.20 gives an example of structures in the vertical wind field before and after rotation. In this case, the absolute deviations from the ideal value of zero could be significantly reduced through Planar-Fit, but spatial patterns still remain in the corrected dataset, because the complex terrain at this site produces a slightly curved wind field that cannot be completely corrected for with a single set of rotation angles. In a similar fashion, sectors with particularly low friction velocities during nighttime could be identified to highlight advection-prone conditions. The visualization of heterogeneity in the sources for momentum, hear, or CO2, surrounding the site is also possible; however, for this application the impact of external drivers such as temperature or radiation on the flux variability needs to be taken into account through additional filters.

Spatial map of the mean vertical wind component before (left panel) and after (right panel) application of the Planar-Fit coordinate rotation. Results taken from site analysis of the Weidenbrunnen site in southeastern Germany (See captions of Fig. 8.17 for further details)
8.5.2 Site Evaluation with Analytical and LS Footprint Models
Analytical footprint models have been widely applied to characterize the “field of view” of eddy-covariance measurements. Their popularity is mainly based on their relative mathematical simplicity (e.g., Schmid 2002) that allows integrating them into eddy-covariance processing software packages without high additional computational expense, or even estimate fetch lengths through spreadsheet applications. This simplicity is what makes them attractive as a component in site evaluation tools, since particularly network studies require the processing of tens of thousands of footprint estimates. Analytic footprint models are often restricted to rather narrow ranges of input parameters like aerodynamic roughness length or stability of atmospheric stratification, which reduces the dataset that can actually be processed, and/or calls for adaptations in the assignment of effective roughness lengths. Rebmann et~al. (2005) demonstrated the potential of the site evaluation tool by Göckede et~al. (2004), which is based on an analytical footprint model, for network-wide studies on a large number of sites. Even though their study was impacted by certain conceptual limitations of the analytical footprint model such as the exclusion of stable stratification cases beyond a certain stability threshold, they produced a comprehensive survey on fetch conditions and data quality among the participating 18 observation sites, and pointed out footprint-related measurement problems. Since analytical footprint estimates tend to be larger than stochastic ones due to the neglect of along-wind diffusion, and at the same time the land cover structure is usually more heterogeneous with increasing distance from the tower (tower locations are commonly selected to be homogeneous at least in the near field), the site evaluations based on analytical models provide a conservative estimate of quality results.
Lagrangian stochastic (LS) footprint models offer more ways of adaptation to local measurement conditions, which is particularly valuable for studies over tall vegetation (see also Sect. 8.3). However, the gains in accuracy achieved by, for example, the consideration of within-canopy transport (Baldocchi 1997; Rannik et~al. 2003), sources at multiple levels (Markkanen et~al. 2003), or along-wind diffusion (Rannik et~al. 2000), come along with significantly increased computational expense, which plays a major role for site evaluation concepts that cover multiple sites over a time frame of several months. Also, the quality of the simulations is dependent on a reliable description of vertical turbulence profiles under various atmospheric conditions (Göckede et~al. 2007), while high-quality datasets to describe these profiles are only available for a small subset of sites within FLUXNET. Application of LS models in extensive site evaluation studies, therefore, usually calls for simplifications in the setup, such as the use of generic turbulence profiles that are not customized for each specific forest stand, and the pre-calculation of source weight functions for specific combinations of atmospheric stability, measurement height, and terrain roughness (Göckede et~al. 2006). Using this strategy, the network study by Göckede et~al. (2008) processed 30-min footprints for 76 data months of flux measurements from 25 sites, demonstrating the applicability of LS footprints as a standard quality assessment tool for eddy-covariance databasing.
8.5.3 Applicability and Limitations
Quality assessment using footprint models, like most other areas where footprints are commonly used, is subject to an inherent contradiction that needs to be taken into consideration when interpreting the results. The application of most footprint models is theoretically restricted to horizontally homogeneous flow conditions, which can only be obtained if the tower is surrounded by perfectly uniform terrain with respect to topography, aerodynamic roughness, and sources for sensible and latent heat. This is particularly the case for analytic and forward Lagrangian stochastic models which are easy to use and flexible enough to be applied to multiple sites over longer time frames, as required for the network studies cited above. The overriding objective of footprint-based site evaluation, however, is to characterize the influence of heterogeneity in the surrounding terrain on the flux measurements. Therefore, such tools will always violate the area of applicability that has been defined for the employed footprint model (Vesala et~al. 2008b), except for the unusual case that the terrain is perfectly flat, and the analyzed heterogeneities only affect the sources of “passive” scalars like CO2 but not the flow conditions. These problems can only be avoided through the use of backward LS footprint models (Kljun et~al. 2002) or closure approaches (Sogachev et~al. 2005a, b) (see also Sects. 8.2 and 8.4) that can explicitly handle inhomogeneous flow conditions, but their requirements for setting up the model domain might make extensive network studies impossible.
All footprint results obtained outside the area of applicability of the underlying models will be subject to increased uncertainty. Complex topography and step changes in roughness or heat flux source strength alter the atmospheric flow conditions (Foken and Leclerc 2004; Klaassen et~al. 2002; Leclerc et~al. 2003a; Schmid and Oke 1988), so source area predictions based on the assumption of homogeneous transport will be biased (Finnigan 2004). This uncertainty will only slightly affect qualitative site evaluation results like the identification of a wind sector with reduced data quality, but quantitative findings like the percentage flux contribution of a certain land cover type have to be evaluated carefully. A general error estimate cannot be provided, since the deviations from ideal flow conditions depend on the relative location of “disturbing” terrain elements with respect to the sensor position, and the local wind climatology, so that they need to be reassessed for every case study.
Footprint studies that aim at the assessment of long-term averaged properties, like a representative footprint climatology or the mean data quality for a specific sector, are likely to be biased by problems related to simulating source weight at night. Analytical models, like, for example, the FSAM model (Schmid 1994, 1997) used in the framework by Göckede et~al. (2004), are often restricted to input parameter ranges that exclude parts of the stable stratification range, effectively discriminating against nighttime measurements which often have large source areas and tend toward lower flux quality ratings. LS models are less numerically unstable than analytical ones in situations as such, but also the representativeness of LS footprints is questionable in case of weak and intermittent turbulence, or even flow conditions dominated by wave motions. Exclusion of these situations leads to a systematic shift toward higher data quality and smaller footprint climatologies, compared to a treatment of the complete dataset; however, at least in case of the LS models, the major part of the excluded data does not fulfill the theoretic assumptions for eddy-covariance data processing either, so these data also would not be considered for the assessment of the net carbon budget, for example.
In an attempt to better characterize the problems linked to the application of footprint models in heterogeneous flow conditions, Markkanen et~al. (2009) classified the agreement of different footprint models with an LES study (Steinfeld et~al. 2008). Their results categorized the correlation between models in relation to the contribution of different flux sources to the total flux, and also considered the location of “disturbing” grid elements relative to the location of the peak of the source weight function. Factors influencing the model output, such as the horizontal grid resolution, or the measuring height of the sensors, were taken into account in a sensitivity study. Data quality analyses such as described in the previous sections can generally be improved by comparing the general accuracy of employed footprint models with a reference model that is better suited for application in heterogeneous conditions. Such an approach would strengthen the data quality analyses, and allow for drawing more reliable conclusions on the site characteristics
8.6 Validation of Footprint Models
Validations of footprint models are often only a comparison of different footprint models. According to Foken and Leclerc (2004), only a few experimental datasets of tracer experiments are available for validation purposes. While analytical footprint predictions were often evaluated using results of Lagrangian footprint models, there is no such simple possibility for the evaluation of Lagrangian footprint models. LS footprint models consist of a dispersion model and an estimation scheme for the footprint function. LS dispersion models have been tested against dispersion experiments in numerous cases for different turbulence regimes (Reynolds 1998; Kurbanmuradov and Sabelfeld 2000; Kljun et~al. 2002); therefore, the ability of LS models to reproduce dispersion statistics for several flows is well established. Only a few footprint results from Lagrangian models were compared with experimental data: Leclerc et~al. (1988) first compared a Lagrangian simulation against a tracer released at different depths above and inside a short alfalfa canopy. The results suggest that the influence of thermal stability inside plant canopies played an important role on the turbulent diffusion. Subsequently, Finn et~al. (1996) performed a tracer experiment in the convective boundary layer at Hanford over a short sagebrush canopy in unstable conditions against which they tested both a Lagrangian simulation used in Leclerc and Thurtell (1990) and the Horst and Weil (1994) analytical solution to the diffusion equation. Leclerc et~al. (1997) compared both LES and Lagrangian simulations against tracer flux data in the convective boundary layer with good results. Leclerc et~al. (2003a, b) have compared the footprint models for fluxes over forest canopy with tracer flux measurement experiments. Mölder et~al. (2004) dealt with the validation of footprint models as a way to compare both analytical and Lagrangian models against experimental data. Kljun et~al. (2004b) compared forward and backward Lagrangian models against data from tracer release experiments in a wind tunnel. Such independent comparisons between models and experimental validation enable a robust assessment of model sensitivity to various environmental variables. In general, the investigated footprint models agree well with the tracer experiment. Even though these comparisons gave promising results, there is still a need for further experimental data allowing for validation of footprint models, the LS models in particular.
Foken and Leclerc (2004) pointed out that complex validation experiments are expensive, and hence difficult to achieve. Nevertheless, the authors show that ongoing experiments can also be used to validate footprint models, when two or more well-defined and neighboring surfaces with significantly different fluxes can be studied. These issues are important if footprint models are to be used as a tool to define experimental requirements and validate experimental data. An application of this method was successfully made by Göckede et~al. (2005) with two flux stations over bare soil and a meadow. A third flux station with a footprint area covering both surfaces was used to validate the footprint model, because the contributions of both surfaces changed with the stability and wind velocity. Earlier investigations used a similar approach: Soegaard et~al. (2003) operated five ground-level EC systems over five different crop fields together with a sixth set up on top of a higher mast to enable landscape-wide flux measurements. The agreement between high-level values and those integrated from ground-level using a reformulated version of the models of Gash (1986) and Schuepp et~al. (1990) was good. Hsieh et~al. (2000) developed an analytical model based on Lagrangian dispersion model and dimensional analysis. They found a good agreement with model predictions and measured fluxes over a transect from a desert to an irrigated potato field. More recently, Marcolla and Cescatti (2005) compared three analytical footprint models over a meadow with different surface characteristics and one of the models (Schuepp et~al. 1990) overestimated the footprint.
The LES approach provides a valuable “dataset,” with much of the flow complexities inherent in a true atmospheric flow against which simpler footprint models can be verified. Recently, Prabha et~al. (2008a) made a comparison between the in-canopy footprints obtained using a Lagrangian simulation with those obtained against a large-eddy simulation. In that model, the Lagrangian stochastic model was driven by flow statistics derived from the large-eddy simulation. Markkanen et~al. (2009) published a review of conventional stochastic models, that is, that of Kljun et~al. (2002) and that of Rannik et~al. (2000) tested against LES-driven footprint estimates for ABL and ASL conditions, respectively. They concluded that the models agreed well for most of the measurement heights. The two conventional flux footprint models agreed best under near-neutral conditions, whereas the agreement between LES and LS model for ABL was better for intermediate measurement heights and for the convective case.
References
Amiro BD (1998) Footprint climatologies for evapotranspiration in a boreal catchment. Agric For Meteorol 90(3):195–201
Apsley DD, Castro IP (1997) A limited-length-scale k – ε model for the neutral and stably-stratified atmospheric boundary layer. Bound Layer Meteorol 83:75–98
Aubinet M, Heinesch B, Yernaux M (2003) Horizontal and vertical CO2 advection in a sloping forest. Bound Layer Meteorol 108(3):397–417
Aubinet M, Berbigier P, Bernhofer Ch, Cescatti A, Feigenwinter C, Granier A, Grünwald Th, Havrankova K, Heinesch B, Longdoz B, Marcolla B, Montagnani L, Sedlak P (2005) Comparing CO2 storage and advection conditions at night at different Carboeuroflux sites. Bound Layer Meteorol 116:63–94
Ayotte KW, Finnigan JJ, Raupach MR (1999) A second-order closure for neutrally stratified vegetative canopy flows’. Bound Layer Meteorol 90:189–216
Baldocchi D (1997) Flux footprints within and over forest canopies. Bound Layer Meteorol 85:273–292
Baldocchi D et al (2001) FLUXNET: a new tool to study the temporal and spatial variability of ecosystem-scale carbon dioxide, water vapor, and energy flux densities. Bull Am Meteorol Soc 82(11):2415–2434
Baldocchi DD et al (2005) “Wet/dry Daisyworld”: a conceptual tool for quantifying the spatial scaling of heterogeneous landscapes and its impact on the subgrid variability of energy fluxes. Tellus B 57(3):175–188
Barcza Z et al (2009) Spatial representativeness of tall tower eddy covariance measurements using remote sensing and footprint analysis. Agric For Meteorol 149(5):795–807
Baumert H, Peters H (2000) Second-moment closures and length scales for weakly stratified turbulent shear flows. J Geophys Res 105:6453–6468
Belcher SE, Hunt JCR (1998) Turbulent air flow over hills and waves. Annu Rev Fluid Mech 30:507–538
Belcher SE, Jerram N, Hunt JCR (2003) Adjustement of a turbulent boundary layer to a canopy of roughness elements. J Fluid Mech 488:369–398
Cai XH, Leclerc MY (2007) Forward-in-time and backward-in-time dispersion in the convective boundary layer: the concentration footprint. Bound Layer Meteorol 123:201–218
Cai X, Peng G, Guo X, Leclerc MY (2008) Evaluation of backward and forward Lagrangian footprint models in the surface layer. Theor Appl Climatol 93:207–233
Cai X, Chen J, Desjardins RL (2010) Flux footprints in the convective boundary layer: large-eddy simulation and lagrangian stochastic modelling. Bound Layer Meteorol 137:31–47
Castro FA, Palma JMLM, Silva LA (2003) Simulation of the Askervein flow: Part 1: Reynolds averaged Navier-Stokes equations (k-ε turbulence model). Bound Layer Meteorol 107:501–530
Chandrasekar A, Philbrick CR, Clark R, Doddridge B, Georgopoulos P (2003) A large-eddy simulation study of the convective boundary layer over Philadelphia during the 1999 summer NE-OPS campaign. Environ Fluid Mech 3:305–329
Chen JM,~Black TA, Novak MD, Adams RS (1995) A wind tunnel study of turbulent air flow in forest clearcuts. In: Coutts MP, Grace J (eds) Wind and trees. Cambridge University Press, London, pp 71–87, chap. 4
Chen BZ, Chen JM, Mo G, Black A, Worthy DEJ (2008) Comparison of regional carbon flux estimates from CO2 concentration measurements and remote sensing based footprint integration. Glob Biogeochem Cycles 22(2)
Corrsin S (1974) Limitations of gradient transport models in random walks and turbulence. Adv Geophys 18A:25–60
Davidson EA et al (2002) Minimizing artifacts and biases in chamber-based measurements of soil respiration. Agric For Meteorol 113(1–4):21–37
Deardorff JW (1972) Numerical investigations of neutral and unstable planetary boundary layers. J Atmos Sci 18:495–527
Denmead OT, Bradley EF (1985) Flux-gradient relationships in a forest canopy. In: Hutchison BA, Hicks BB (eds) The forest-atmosphere interaction. Reidel, Dordrecht, pp 421–442
Duynkerke PG (1988) Application of the E - ε turbulence closure model to the neutral and stable atmospheric boundary layer. J Atmos Sci 45:865–880
Finn D, Lamb B, Leclerc MY, Horst TW (1996) Experimental evaluation of analytical and Lagrangian surface-layer flux footprint models. Bound Layer Meteorol 80:283–308
Finnigan J (2000) Turbulence in plant canopies. Annu Rev Fluid Mech 32:519–571
Finnigan JJ (2004) The footprint concept in complex terrain. Agric For Meteorol 127:117–129
Finnigan JJ (2007) Turbulent flow in canopies on complex topography and the effects of stable stratification. In: Gayev YA, Hunt JCR (eds) Flow and transport processes with complex obstructions. Springer, Dordrecht, pp 199–219
Finnigan JJ, Belcher SE (2004) Flow over a hill covered with a plant canopy. Q J R Meteorol Soc 130:1–29
Flesch TK (1996) The footprint for flux measurements, from backward Lagrangian stochastic models. Bound Layer Meteorol 78:399–404
Flesch TK, Wilson JD (1992) A two-dimensional trajectory-simulation model for non-Gaussian, inhomogeneous turbulence within plant canopies. Bound Layer Meteorol 61:349–374
Flesch TK, Wilson JD (1999) Wind and remnant tree sway in forest cutblocks: I. Measured winds in experimental cutblocks. Agric For Meteorol 93:229–242
Flesch TK, Wilson JD, Yee E (1995) Backward-time Lagrangian stochastic dispersion models and their application to estimate gaseous emissions. J Appl Meteorol 34:1320–1332
Foken T (2006) Angewandte Meteorologie, Mikrometeorologische Methoden, 2. überarb. u. erw. Aufl. Springer, Berlin/Heidelberg/New York, 326 pp
Foken T, Leclerc MY (2004) Methods and limitations in validation of footprint models. Agric Forest Meteorol 127:223–234
Foken T, Wichura B (1996) Tools for quality assessment of surface-based flux measurements. Agric For Meteorol 78:83–105
Foken T et al (2004) Post-field data quality control. In: Lee X et al (eds) Handbook of micrometeorology: a guide for surface flux measurements. Kluwer Academic Publishers, Dordrecht, pp 181–208
Foudhil H, Brunet Y, Caltagirone J-P (2005) A fine-scale k-ε model for atmospheric flow over heterogeneous landscapes. Environ Fluid Mech 5:247–265
Gash JHC (1986) A note on estimating the effect of a limited fetch on micrometeorological evaporation measurements. Bound Layer Meteorol 35:409–413
Göckede M et al (2004) A combination of quality assessment tools for eddy covariance measurements with footprint modelling for the characterisation of complex sites. Agric For Meteorol 127(3–4):175–188
Göckede M, Markkanen T, Mauder M, Arnold K, Leps J-P, Foken T (2005) Validation of footprint models using natural tracer measurements from a field experiment. Agric For Meteorol 135 (1–4):314–325
Göckede M et al (2006) Update of a footprint-based approach for the characterisation of complex measurement sites. Bound Layer Meteorol 118:635–655
Göckede M, Thomas C, Markkanen T, Mauder M, Ruppert J, Foken T (2007) Sensitivity of Lagrangian Stochastic footprints to turbulence statistics. Tellus B 59:577–586
Göckede M et al (2008) Quality control of CarboEurope flux data – Part 1: coupling footprint analyses with flux data quality assessment to evaluate sites in forest ecosystems. Biogeosciences 5:433–450
Grant RF et al (2009) Interannual variation in net ecosystem productivity of Canadian forests as affected by regional weather patterns - a Fluxnet-Canada synthesis. Agric For Meteorol 149(11):2022–2039
Gross G (1993) Numerical simulation of canopy flows. Springer, Berlin, 168 pp
Guo XF, Cai XH (2005) Footprint characteristics of scalar concentration in the convective boundary layer. Adv Atmos Sci 22:821–830
Hadfield MG (1994) Passive scalar diffusion from surface sources in the convective boundary layer. Bound Layer Meteorol 69:417–448
Haenel HD, Grünhage L (2001) Reply to the comment on ‘footprint analysis: a closed analytical solution based on height-dependent profiles of wind speed and eddy viscosity’ by T. W. Horst. Bound Layer Meteorol 101:449–458
Hanjalić K (2005) Will RANS survive LES? A view of perspectives. ASME J Fluid Eng 27:831–839
Hanjalić K, Kenjereš S (2008) Some developments in turbulence modeling for wind and environmental engineering. J Wind Eng Ind Aerodyn 96:1537–1570
Hipsey MR, Sivapalan M, Clement TP (2004) A numerical and field investigation of surface heat fluxes from small wind-sheltered waterbodies in semi-arid Western. Environ Fluid Mech 4:79–106
Horst TW, Weil JC (1992) Footprint estimation for scalar flux measurements in the atmospheric surface layer. Bound Layer Meteorol 59:279–296
Horst TW, Weil JC (1994) How far is far enough? The fetch requirements for micrometeorological measurement of surface fluxes. J Atmos Ocean Technol 11:1018–1025
Hsieh C-I, Katul G (2009) The Lagrangian stochastic model for estimating footprint and water vapor flux over inhomogeneous surfaces. Int J Biometeorol 53:87–100
Hsieh CI, Katul G, Chi T (2000) An approximate analytical model for footprint estimation of scalar fluxes in thermally stratified atmospheric flows. Adv Water Resour 23:765–772
Irvine MR, Gardiner BA, Hill MK (1997) The evolution of turbulence across a forest edge. Bound Layer Meteorol 84:467–496
Järvi L, Rannik U, Mammarella I, Sogachev A, Aalto PP, Keronen P, Siivola E, Kulmala M, Vesala T (2009) Annual particle flux observations over a heterogeneous urban area. Atmos Chem Phys 9:7847–7856
Kaimal JC, Finnigan JJ (1994) Atmospheric boundary layer flows: their structure and measurement. Oxford University Press, New York, 289 pp
Kantha LH (2004) The length scale equation in turbulence models. Nonlinear Process Geophys 11:83–97
Karipot A, Leclerc MY, Zhang G, Martin T, Starr G, Hollinger D, McCaughey JH, Hendrey GR (2006) Nocturnal C02 exchange over a tall forest canopy associated with intermittent low-level jet activity. J Theor Appl Climatol 85:243–248
Karipot A, Leclerc MY, Zhang G (2008a) Climatology of the nocturnal low-level jets observed over north Florida. Mon Weather Rev 137:2605–2621
Karipot A, Leclerc MY, Zhang G, Lewin K, Nagy J, Starr G (2008b) Influence of nocturnal low-level jet on turbulence structure and CO2 flux measurements over a forest canopy. J Geophys Res 113, D10102
Katul GG, Oren R, Ellsworth D, Hseih CI, Phillips N, Lewin K (1997) A Lagrangian dispersion model for predicting CO2 sources, sinks and fluxes in uniform loblolly pine (Pinus taeda L.) stand. J Geophys Res 102:9309–9321
Katul GG, Mahrt L, Poggi D, Sanz C (2004) One- and two-equation models for canopy turbulence. Bound Layer Meteorol 113:81–109
Katul GG, Finnigan JJ, Poggi D, Leuning R, Belcher SE (2006) The influence of hilly terrain on canopy-atmosphere carbon dioxide exchange. Bound Layer Meteorol 118:189–216
Kim J et al (2006) Upscaling fluxes from tower to landscape: overlaying flux footprints on high-resolution (IKONOS) images of vegetation cover. Agric For Meteorol 136(3–4):132–146
Klaassen W, Sogachev A (2006) Flux footprint simulation downwind of a forest edge. Bound Layer Meteorol 121:459–473
Klaassen W et al (2002) Increased heat fluxes near a forest edge. Theor Appl Climatol 72 (3–4):231–243
Kljun N, Rotach MW, Schmid HP (2002) A 3-D backward Lagrangian footprint model for a wide range of boundary layer stratifications. Bound Layer Meteorol 103:205–226
Kljun N, Calanca P, Rotach MW, Schmid HP (2004a) A simple parameterisation for flux footprint predictions. Bound Layer Meteorol 112:503–523
Kljun N, Kastner-Klein P, Fedorovich E, Rotach MW (2004b) Evaluation of a Lagrangian footprint model using data from a wind tunnel convective boundary layer. Special issue on footprints of fluxes and concentrations. Agric For Meteorol 127:189–201
Kormann R, Meixner FX (2001) An analytic footprint model for neutral stratification. Bound Layer Meteorol 99:207–224
Kruijt B (1994) Turbulence over forest downwind of an edge. PhD thesis, University of Groningen, Groningen
Kurbanmuradov OA, Sabelfeld KK (2000) Lagrangian stochastic models for turbulent dispersion in the atmospheric boundary layer. Bound Layer Meteorol 97:191–218
Kurbanmuradov O, Rannik Ü, Sabelfeld K, Vesala T (1999) Direct and adjoint Monte Carlo algorithms for the footprint problem. Monte Carlo Methods Appl 5:85–112
Kurbanmuradov O, Rannik Ü, Sabelfeld KK, Vesala T (2001) Evaluation of mean concentration and fluxes in turbulent flows by Lagrangian stochastic models. Math Comput Simul 54:459–476
Kurbanmuradov O, Levykin AI, Rannik Ü, Sabelfeld K, Vesala T (2003) Stochastic Lagrangian footprint calculations over a surface with an abrupt change of roughness height. Monte Carlo Methods Appl 9:167–188
Kustas WP et al (2006) Using a remote sensing field experiment to investigate flux-footprint relations and flux sampling distributions for tower and aircraft-based observations. Adv Water Resour 29:355–368
Launder BE, Spalding DB (1974) The numerical computation of turbulent flows. Comput Methods Appl Mech Eng 3:269–289
Launder BE, Reece GJ, Rodi W (1975) Progress in the development of a Reynolds-stress turbulent closure. J Fluid Mech 68:537–566
Launiainen S, Vesala T, Mölder M, Mammarella I, Smolander S, Rannik Ü, Kolari P, Hari P, Lindroth A, Gatul G (2007) Vertical variability and effect of stability on turbulence characteristics down to the floor of a pine forest. Tellus 59B:919–936
Law BE (2005) Carbon dynamics in response to climate and disturbance: recent progress from multiscale measurements and modeling in AmeriFlux. In: Omasa K et al (eds) Plant responses to air pollution and global change. Springer, Tokyo, pp 205–213
Leclerc MY, Thurtell GW (1990) Footprint prediction of scalar fluxes using a Markovian analysis. Bound Layer Meteorol 52:247–258
Leclerc MY, Thurtell GW, Kidd GE (1988) Measurements and Langevin simulations of mean tracer concentration fields downwind from a circular line source inside an alfalfa canopy. Bound Layer Meteorol 43:287–308
Leclerc MY, Beissner KC, Shaw RH, den Hartog G, Neumann HH (1991) The influence of buoyancy on third-order turbulent velocity statistics within a decidious forest. Bound Layer Meteorol 55:109–123
Leclerc MY, Shen S, Lamb B (1997) Observations and large-eddy simulation modeling of footprints in the lower convective boundary layer. J Geophys Res 102(D8):9323–9334
Leclerc MY, Karipot A, Prabha T, Allwine G, Lamb B, Gholz HL (2003a) Impact of non-local advection on flux footprints over a tall forest canopy: a tracer flux experiment. Agric For Meteorol 115:19–30
Leclerc MY, Meskhidze N, Finn D (2003b) Comparison between measured tracer fluxes and footprint model predictions over a homogeneous canopy of intermediate roughness. Agric For Meteorol 117:145–158
Lee X (2003) Fetch and footprint of turbulent fluxes over vegetative stands with elevated sources. Bound Layer Meteorol 107:561–579
Lee X (2004) A model for scalar advection inside canopies and application to footprint investigation. Agric For Meteorol 127(3–4):131–141
Letzel M,~Kanda M, Raasch S (2006) A new dimension of Urban Climate Modelling with parallel Large-eddy Simulation. In: Preprints, 6th international conference on urban climate, Göteborg, Sweden. International Association for Urban Climate
Leuning R, Denmead OT, Miyata A, Kim J (2000) Source-sink distributions of heat, water vapour, carbon dioxide and methane in rice canopies estimated using Lagrangian dispersion analysis. Agric For Meteorol 104:233–249
Luhar AK, Rao KS (1994a) Source footprint analysis for scalar fluxes measured over an inhomogeneous surface. In: Gryning SE, Milan MM (eds) Air pollution modeling and its applications. Plenum Press, New York
Luhar AK, Rao KS (1994b) Source footprint analysis for scalar fluxes measured in flows over inhomogeneous surface. In: Gryning SE, Millan MM (eds) Air pollution modelling and its application, vol X. Plenum Press, New York, pp 315–323
Luysseart S et al (2008) Old-growth forests as global carbon sinks. Nature 455(11):213–215
Mao S, Leclerc MY, Michaelides EE (2008) Passive scalar flux footprint analysis over horizontally inhomogeneous plant canopy using large-eddy simulation. Atmos Environ 42:5446–5458
Marcolla B, Cescatti A (2005) Experimental analysis of flux footprint for varying stability conditions in an alpine meadow. Agric For Meteorol 135:291–301
Markkanen T, Rannik Ü, Marcolla B, Cescatti A, Vesala T (2003) Footprints and fetches for fluxes over forest canopies with varying structure and density. Bound Layer Meteorol 106:437–459
Markkanen T, Steinfeld G, Kljun N, Raasch S, Foken T (2009) Comparison of conventional Lagrangian stochastic footprint models against LES driven footprint estimates. Atmos Chem Phys 9:5575–5586
Mason PJ (1988) Large-eddy simulation of the convective atmospheric boundary layer. J Atmos Sci 46:1492–1516
Meyers T, Paw UKT (1986) Testing of a higher-order closure model for modeling airflow within and above plant canopies. Bound Layer Meteorol 37:297–311
Moeng C-H (1984) A large-eddy simulation model for the study of planteray boundary-layer turbulence. J Atmos Sci 41:252–2061
Moeng C-H, Wyngaard JC (1988) Spectral analysis of large-eddy simulations of the convective boundary layer. J Atmos Sci 45:3575–3587
Mölder M, Klemedtsson L, Lindroth A (2004) Turbulence characteristics and dispersion in a forest—tests of Thomson’s random-flight model. Agric For Meteorol 127(3–4):203–222
Morse AP, Gardiner BA, Marshall BJ (2002) Mechanisms controlling turbulence development across a forest edge. Bound Layer Meteorol 103:227–251
Myklebust MC et al (2008) Comparison of eddy covariance, chamber, and gradient methods of measuring soil CO2 efflux in an annual semi-arid grass, Bromus tectorum. Agric For Meteorol 148(11):1894–1907
Nagy MT et al (2006) Footprint-adjusted net ecosystem CO2 exchange and carbon balance components of a temperate forest. Agric For Meteorol 139(3–4):344–360
Ogunjemiyo SO et al (2003) Methods of estimating CO2, latent heat and sensible heat fluxes from estimates of land cover fractions in the flux footprint. Agric For Meteorol 117(3–4):125–144
Panin GN, Tetzlaff G (1999) A measure of inhomogeneity of the land surface and parametrization of turbulent fluxes under natural conditions. Theor Appl Climatol 62(1–2):3–8
Pasquill F (1972) Some aspects of boundary layer description. Q J R Meteorol Soc 98:469–494
Pasquill F, Smith FB (1983) Atmospheric diffusion, 3rd edn. Wiley, New York
Patton EG, Davis HJ, Barth MC, Sullivan P (2001) Decaying scalars emitted by a forest canopy: a numerical study. Bound Layer Meteorol 100:91–129
Peng G, Cai X, Zhang H, Li A, Hu F, Leclerc MY (2008) Heat flux apportionment to heterogeneous surfaces using flux footprint analysis. Adv Atmos Sci 25:107–116
Pinard J-P, Wilson JD (2001) First- and second-order closure models for wind in a plant canopy. J Appl Meteorol 40:1762–1768
Poggi D, Katul GG, Cassiani M (2008) On the anomalous behavior of the Lagrangian structure function similarity constant inside dense canopies. Atmos Environ 42:4212–4231
Prabha T, Leclerc MY, Karipot A, Hollinger DY (2007) Low-frequency effects on eddy-covariance fluxes under the influence of a low-level jet. J Appl Meteorol 46:338–352
Prabha T, Leclerc MY, Baldocchi D (2008a) Comparison of in-canopy flux footprints from Lagrangian simulations against wind tunnel experiments and large-eddy simulation. J Appl Meteorol Climatol 47(8):2115–2128
Prabha TV, Leclerc MY, Karipot A, Hollinger DY, Mursch-Radlgruber E (2008b) Influence of nocturnal low-level jets on eddy covariance fluxes over a tall forest canopy. Bound Layer Meteorol 126:219–236
Rannik Ü, Aubinet M, Kurbanmuradov O, Sabelfeld KK, Markkanen T, Vesala T (2000) Footprint analysis for the measurements over a heterogeneous forest. Bound Layer Meteorol 97:137–166
Rannik Ü, Markkanen T, Raittila J, Hari P, Vesala T (2003) Turbulence statistics inside and over forest: influence on footprint prediction. Bound Layer Meteorol 109:163–189
Rannik Ü, Kolari P, Vesala T, Hari P (2006) Uncertainties in measurement and modelling of net ecosystem exchange of a forest ecosystem at different time scales. Agric For Meteorol 138:244–257
Rao KS, Wyngaard JC, Coté OR (1974) Local advection of momentum, heat, and moisture in micrometeorology. Bound Layer Meteorol 7:331–348
Raupach M (1988) Canopy transport processes. In: Flow and transport in the natural environment: advances and applications. Springer, Berlin, pp 95–127
Raupach MR (1989) Applying Lagrangian fluid mechanics to infer scalar source distributions from concentration profiles in plant canopies. Agric For Meteorol 47:85–108
Raupach MR, Finnigan JJ (1997) The influence of topography on meteorology variables and surface-atmosphere interactions. J Hydrol 190:182–213
Rebmann C et al (2005) Quality analysis applied on eddy covariance measurements at complex forest sites using footprint modelling. Theor Appl Climatol 80(2–4):121–141
Reithmaier LM et al (2006) Use of remotely sensed land use classification for a better evaluation of micrometeorological flux measurement sites. Theor Appl Climatol 84(4):219–233
Reth S, Göckede M, Falge E (2005) CO2 efflux from agricultural soils in Eastern Germany – comparison of a closed chamber system with eddy covariance measurements. Theor Appl Climatol 80(2–4):105–120
Reynolds AM (1998) A two-dimensional Lagrangian stochastic dispersion model for convective boundary layers with wind shear. Bound Layer Meteorol 86:345–352
Sabelfeld KK, Kurbanmuradov OA (1990) Numerical statistical model of classical incompressible isotropic turbulence. Sov J Numer Anal Math Model 5:251–263
Sabelfeld KK, Kurbanmuradov OA (1998) One-particle stochastic Lagrangian model for turbulent dispersion in horizontally homogeneous turbulence. Monte Carlo Methods Appl 4:127–140
Sawford BL (1985) Lagrangian statistical simulation of concentration mean and fluctuation fields. J Clim Appl Meterol 24:1152–1166
Sawford BL (1999) Rotation of trajectories in Lagrangian stochastic models of turbulent dispersion. Bound Layer Meteorol 93:411–424
Schmid HP (1994) Source areas for scalar and scalar fluxes. Bound Layer Meteorol 67:293–318
Schmid HP (1997) Experimental design for flux measurements: matching scales of observations and fluxes. Agric For Meteorol 87:179–200
Schmid HP (2002) Footprint modeling for vegetation atmosphere exchange studies: a review and perspective. Agric For Meteorol 113:159–183
Schmid HP, Lloyd CR (1999) Spatial representativeness and the location bias of flux footprints over inhomogeneous areas. Agric For Meteorol 93(3):195–209
Schmid HP, Oke TR (1988) Estimating the source area of a turbulent flux measurement over a patchy Surface. In: Proceedings of the eighth symposium on turbulence and diffusion, Preprints. American Meteorological Society, Boston, pp 123–126
Schmid HP, Oke TR (1990) A model to estimate the source area contributing to turbulent exchange in the surface layer over patchy terrain. Q J R Meteorol Soc 116:965–988
Schuepp PH, Leclerc MY, MacPherson JI, Desjardins RL (1990) Footprint prediction of scalar fluxes from analytical solutions of the diffusion equation. Bound Layer Meteorol 50:355–373
Shaw RH, Schumann U (1992) Large-eddy simulation of turbulent flow above and within a forest. Bound Layer Meteorol 61:47–64
Shen S, Leclerc MY (1995) How large must surface inhomogeneities be before they influence the connective boundary layer structure? A case study. Q J R Meteorol Soc 121:1209–1228
Shen S, Leclerc MY (1997) Modelling the turbulence structure in the canopy layer. Agric For Meteorol 87:3–25
Soegaard H, Jensen NO, Boegh E, Hasager CB, Schelde K, Thomsen A (2003) Carbon dioxide exchange over agricultural landscape using eddy correlation and footprint modelling. Agric For Meteorol 114:153–173
Sogachev A (2009) A note on two-equation closure modelling of canopy flow. Bound Layer Meteorol 130(3):423–435. doi:10.1007/s10546-008-9346-2
Sogachev A, Lloyd JJ (2004) Using a one-and-a-half order closure model of the atmospheric boundary layer for surface flux footprint estimation. Bound Layer Meteorol 112:467–502
Sogachev A, Panferov O (2006) Modification of two-equation models to account for plant drag. Bound Layer Meteorol 121:229–266
Sogachev A,~Sedletski A (2006) SCADIS “Footprin calculator”: operating manual. In: Kulmala M, Lindroth A, Ruuskanen T (eds) Proceedings of bACCI, NECC and FCoE activities 2005, Book B, Report Series in Aerosol Science 81B, Helsinki, Finland
Sogachev A, Menzhulin G, Heimann M, Lloyd J (2002) A simple three dimensional canopy – planetary boundary layer simulation model for scalar concentrations and fluxes. Tellus 54B:784–819
Sogachev A, Rannik Ü, Vesala T (2004) On flux footprints over the complex terrain covered by a heterogeneous forest. Agric For Meteorol 127:143–158
Sogachev A, Leclerc MY, Karipot A, Zhang G, Vesala T (2005a) Effect of clearcuts on footprints and flux measurements above a forest canopy. Agric For Meteorol 133:182–196
Sogachev A, Panferov O, Gravenhorst G, Vesala T (2005b) Numerical analysis of flux footprints for different landscapes. Theor Appl Climatol 80(2–4):169–185
Sogachev A, Leclerc MY, Zhang G, Rannik U, Vesala T (2008) CO2 fluxes near a forest edge: a numerical study. Ecol Appl 18(6):1454–1469
Steinfeld G, Raasch S, Markkanen T (2008) Footprints in homogeneously and heterogeneously driven boundary layers derived from a Lagrangian Stochastic particle model embedded into large-eddy simulation. Bound Layer Meteorol 129:225–248
Stoy PC et al (2009) Biosphere-atmosphere exchange of CO2 in relation to climate: a cross-biome analysis across multipe time scales. Biogeosciences 6:2297–2312
Strong C, Fuentes JD, Baldocchi DD (2004) Reactive hydrocarbon flux footprints during canopy senescence. Agric For Meteorol 127:159–173
Su HB, Leclerc MY (1998) Large-eddy simulation of trace gas footprints from infinite crosswind line sources inside a forest canopy. In: Preprints, Proceedings of the 23rd conference on agriculture and forest meteorology. American Meteorological Society, Boston, pp 388–391
Su H-B, Shaw RH, Paw KT, Moeng C-H, Sullivan PP (1998) Turbulent statistics of neutrally stratified flow within and above a sparse forest from large-eddy simulation and field observations. Bound Layer Meteorol 88:363–397
Svensson U, Häggkvist K (1990) A two-equation turbulence model for canopy flows. J Wind Eng Ind Aerodyn 35:201–211
Thomson DJ (1987) Criteria for the selection of stochastic models of particle trajectories in turbulent flows. J Fluid Mech 189:529–556
Umlauf L, Burchard H (2003) A generic length-scale equation for geophysical turbulence models. J Mar Res 61:235–265
Valentini R et al (2000) Respiration as the main determinant of carbon balance in European forests. Nature 404(6780):861–865
Van Breugel PB, Klaassen W, Moors EJ (1999) Fetch requirements near a forest edge. Physics and chemistry of the earth, Part B. Hydrol Oceans Atmos 24:125–131
van Ulden AP (1978) Simple estimates for vertical diffusion from sources near the ground. Atmos Environ 12:2125–2129
Vesala T, Huotari J, Rannik Ü, Suni T, Smolander S, Sogachev A, Ojala A (2006) Eddy covariance measurements of carbon exchange and latent and sensible heat fluxes over a boreal lake for a full open-water period. J Geophys Res. doi:10.1029/2005JD006365
Vesala T, Järvi L, Launiainen S, Sogachev A, Rannik U, Mammarella I, Siivola E, Keronen P, Rinne J, Riikonen A, Nikinmaa E (2008a) Surface-atmosphere interactions over complex urban terrain in Helsinki, Finland. Tellus 60B:188–199
Vesala T, Kljun N, Rannik Ü, Rinne J, Sogachev A, Markkanen T, Sabelfeld K, Foken Th, Leclerc MY (2008b) Flux and concentration footprint modelling: state of the art. Environ Pollut 152:653–666
Vesala T, Kljun N, Rannik Ü, Sogachev A, Markkanen T, Sabelfeld K, Foken Th, Leclerc MY (2010) Flux and concentration footprint modelling. In: Modelling of pollutants in complex environmental systems, vol II. ILM Publications, St Albans, pp 339–355
Wang W, Rotach M (2010) Flux footprints over an undulating surface. Bound Layer Meteorol 136:325–340
Wang H, Takle ES (1995) A numerical simulation of boundary-layer flows near shelterbelts. Bound Layer Meteorol 75:141–173
Wang WG et al~(2006) Decomposing CO2 fluxes measured over a mixed ecosystem at a tall tower and extending to a region: a case study. J Geophys Res Biogeosci 111(G2):1–14
Watanabe T (2009) LES study on the structure of coherent eddies inducing predominant perturbations in velocities in the roughness sublayer over plant canopies. J Meteorol Soc Jpn 87:39–56
Wilcox DC (2002) Turbulence modeling for CFD. DCW Industries Inc, La Cañada, CA, 540 pp
Wilczak JM, Oncley S, Stage SA (2001) Sonic anemometer tilt correction algorithms. Bound Layer Meteorol 99(1):127–150
Wilson JD,~Flesch TK (1993) Flow boundaries in random-flight dispersion models: enforcing the well-mixed condition. J Appl Meteorol 32:1695–1707
Wilson JD, Flesch TK (1997) Trajectory curvature as a selection criterion for valid Lagrangian stochastic dispersion models. Bound Layer Meteorol 84:411–426
Wilson JD, Flesch TK (1999) Wind and remnant tree sway in forest openings III. A windflow model to diagnose spatial variation. Agric For Meteorol 93:259–282
Wilson NR, Shaw RH (1977) A higher order closure model for canopy flow. J Appl Meteorol 16:1197–1205
Wilson JD, Swaters GE (1991) The source area influencing a measurement in the planetary boundary-layer – the footprint and the distribution of contact distance. Bound Layer Meteorol 55:25–46
Wilson JD, Finnigan JJ, Raupach MR (1998) A first-order closure for disturbed plant-canopy flows, and its application to winds in a canopy on a ridge. Q J R Meteorol Soc 124:705–732
Acknowledgments
Support from ACCENT-BIAFLUX, IMECC EU project and ICOS EU project is acknowledged together with the Academy of Finland Center of Excellence program (project number 1118615).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2012 Springer Science+Business Media B.V.
About this chapter
Cite this chapter
Rannik, Ü. et al. (2012). Footprint Analysis. In: Aubinet, M., Vesala, T., Papale, D. (eds) Eddy Covariance. Springer Atmospheric Sciences. Springer, Dordrecht. https://doi.org/10.1007/978-94-007-2351-1_8
Download citation
DOI: https://doi.org/10.1007/978-94-007-2351-1_8
Published:
Publisher Name: Springer, Dordrecht
Print ISBN: 978-94-007-2350-4
Online ISBN: 978-94-007-2351-1
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)