
Abstract
Analysis procedures developed in the last two decades for performance-based seismic assessment and retrofit design of building structures are critically evaluated. Nonlinear analysis procedures within the framework of deformation-based seismic assessment process are classified with respect nonlinear modeling and acceptance criteria. The critical transition from linear engineering to nonlinear, performance-based engineering practice is addressed. Specifically, the need for enhancing engineers’ knowledge on nonlinear behavior and analysis methods in university education and professional training is highlighted. Rigorous as well as practice-oriented nonlinear analysis procedures based on pushover analysis are treated where special emphasis is given to the latter. All significant pushover analysis procedures developed in the last two decades are summarized and systematically assessed on the basis of a common terminology and notation. Each procedure is evaluated in terms of its practical use as a capacity estimation tool versus capacity-and-demand estimation tool.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
With rapidly growing urbanization in earthquake prone areas in various parts of the world and the consequent increase in urban seismic risk, seismic performance assessment of existing buildings continues to be one of the key issues of earthquake engineering. This contribution is devoted to the evaluation of developments took place in the last two decades in seismic assessment and retrofit design of existing buildings in terms of progress achieved in analysis philosophy and implementation procedures.
In spite of the rationalization of the strength-based design of new buildings in 1980s with the publication of ATC-03 report (ATC, 1978), it was realized in time that this procedure was not suitable for the seismic assessment of existing, old structures, which remained as a critical problem to be resolved until 1990s. Eventually it was concluded that structural behavior and damageability of structures during strong earthquakes were essentially controlled by the inelastic deformation capacities of ductile structural elements. Accordingly, earthquake engineering inclined towards a new approach where seismic evaluation and design of structures are based on nonlinear deformation demands, not on linear stresses induced by reduced seismic forces that are crudely correlated with an assumed overall ductility capacity of a given type of a structure, the starting point of the strength-based design.
The footsteps of performance-based seismic engineering were heard in 1995 with the publication of Vision 2000 document (SEAOC, 1995). This paved the way for two major documents, ATC-40 (ATC, 1996) and FEMA 273-274 (FEMA, 1997), which pioneered the implementation of practice-oriented nonlinear analysis procedures for seismic evaluation and rehabilitation of buildings within the framework of performance-based seismic engineering. In the last decade, such practice was started to be codified in the USA (FEMA, 2000; ASCE, 2007), in Europe (CEN, 2004), in Japan (BCJ, 2009) and in Turkey (MPWS, 2007).
2 Analysis Procedures for Seismic Assessment and Design
Analysis procedures for seismic assessment can be broadly broken down into two main categories, namely, linear analysis procedure for strength-based design and assessment and, nonlinear analysis procedures for deformation-based assessment.
2.1 Linear Analysis Procedure for Strength-Based Assessment and Design: Traditional Procedure for “Linear Engineers”
Strength-based design is the traditional code procedure, which is still being used throughout the world for the seismic design of new structures. It is the extension of the historical seismic coefficient method, which is rationalized and re-defined in 1978 with the publication of ATC-03 document (ATC, 1978). In this procedure, elastic equivalent seismic loads are reduced by certain load reduction factors (response modification factors) and applied to the building in each mode for a linear elastic analysis. The concept of load reduction is based on a single-valued global ductility capacity assumed for the entire structure. This is a judgmental assumption based on several factors, including structural material behavior, redundancy, inherent over strength as well as past experience obtained from case studies with nonlinear analyses, laboratory tests and post-earthquake observations. A typical reduction factor (R) is estimated through the so-called R y – μ – T relationships and augmented by an over-strength factor.
Essentially, estimation of reduced seismic load is nothing but a more elegant way of directly assuming a seismic coefficient for a given type of a building. The most significant progress in strength-based design was realized with the introduction of capacity design principles in 1970s (see Paulay and Priestley, 1992). Although such principles were included in ATC-03 document (1978), their adoption by the seismic codes came relatively late, starting in 1988 with the Uniform Building Code (ICBO, 1988).
With the design of sections according to section forces obtained from the linear analysis under reduced seismic loads combined with an appropriate implementation of capacity design principles have led to a relatively simple and successful prescriptive design approach for new buildings, which is still being used worldwide by almost all seismic design codes.
Regarding the use of strength-based approach for the seismic assessment of existing buildings, however, there are several obstacles. The first major problem is the estimation of a target ductility factor for the building to be assessed. Even the terminology is at odds, as nothing can be targeted for an existing building. Essentially the strength-based approach was developed as a design approach, not an assessment approach. Estimation of an existing ductility capacity applicable to the entirety of an existing building is impossible. On the other hand, linear behavior assumption under reduced seismic loads gives the engineer no indication about the real, inelastic response of the structural system and the possible damage distribution.
In spite of serious drawbacks of strength-based approach in seismic assessment, we have to admit that until recently it was the only approach that practicing engineers could possibly apply to existing buildings. We have to confess that we, civil and structural engineers all over the world, are all “linear engineers” by mentality as a result of our education. Even though we have learned through ultimate strength design that materials behave nonlinearly at section basis, still we are accustomed to analyze our structural systems based on linear system behavior for any action under “prescribed loads” defined by the codes. Actually there is nothing wrong with it, because we are sure that our systems would remain more or less in the linear range under almost all actions. But alas, practicing engineers learned rather lately that the seismic action was an exception.
In view of the fact that majority of design engineers in practice still remain as “linear engineers”, a group of code writers attempted to develope an assessment version of the strength-based design approach. In this scheme, demand to capacity ratios (DCR’s) are calculated by dividing the elastic section forces (elastic demands) to the corresponding section capacities of the existing sections. Thus in an equivalent sense, strength reduction factors of the individual sections are obtained. This is followed by applying the well-known equal displacement rule by assuming that those factors are equal to the corresponding section ductility demands, and finally such demands are compared, at each section, to the prescribed section ductility capacities.
It is seen that the system-based approach applied in the traditional strength-based design is now being imitated in a kind of section-based approach. The question is whether such an imitation is theoretically viable. First of all, the parameters and relationships including the displacement ductility ratio, μ, are all valid only for the equivalent (modal) SDOF system. It is not clear how section ductility ratio can be defined. Moreover equal displacement rule is verifiable only through comparisons of linear and nonlinear peak displacement responses of SDOF systems and such a relationship can hardly be extended to the section responses of linear and nonlinear multi-degree-of-freedom (MDOF) systems. Finally this section-based approach eventually relies on judgmentally prescribed section ductility capacities as acceptance criteria, as for the global target ductility capacity prescribed in the system-based approach.
It is thus clear that section-based approach of strength-based design cannot be considered as a viable and reliable seismic assessment procedure. Yet, this procedure is now contained in a number of codes, including the USA (ASCE, 2007) and Turkey (MPWS, 2007). Considering the fact that the engineering community worldwide is in a transition stage from linear to nonlinear engineering practice, such linear procedures should be considered to be temporary applications until practicing engineers become fully familiar with the new, modern procedures.
2.2 Nonlinear Analysis Procedures for Deformation-Based Seismic Assessment: A New Era in Earthquake Engineering
The last decade of the previous millennium witnessed the development of the concept of performance-based seismic assessment, where seismic demand and consequent damage are estimated on a quantifiable basis under given levels of seismic action and such damage is then checked to satisfy the acceptable damage limits set for the specified performance objective(s). Seismic action levels and performance objectives can be found in the relevant literature (ASCE, 2007).
Since damage to be estimated at the component level is generally associated with the nonlinear behavior under strong ground motion, the concept of performance-based seismic assessment is directly related to nonlinear analysis procedures and deformation-based seismic assessment concept.
There is no doubt that development of deformation-based seismic assessment procedure represents a new era in earthquake engineering. For the first time, practicing engineers have become able to calculate the plastic deformation quantities under a given seismic action as seismic demand quantities, which are the direct attributes of the seismic damage. They have realized that such demand quantities should be within the limits of deformation capacities of the ductile structural elements. They better understood the significance of brittle demand quantities and brittle failure modes. They learned how they could identify the weaknesses of a given structural system and thus they began feeling themselves better equipped to construct well-behaved ductile structural systems, either in new construction or in retrofit design of existing structures. We should admit that before the advent of deformation-based assessment, any of the above-mentioned topics was hardly on the agenda of the structural engineer who had no idea of a seismic design with an alternative approach other than strength-based approach.
Nonlinear analysis procedures for deformation-based seismic assessment can be grouped into two main categories, namely, Nonlinear Response History Analysis (NLRHA) and Practice Oriented Nonlinear Analysis (PONLA) procedures.
NLRHA is the rigorous analysis procedure based on the numerical integration of nonlinear equations of motion of MDOF structural system in the domain. Currently NLRHA appears to remain less popular in engineering community compared to PONLA due to a number of understandable reasons, such as the difficulties in selection and scaling of ground motion input data, excessive computer hardware and run time requirements, lack of availability of reliable software in sufficient numbers to choose from, difficult post-processing requirements of excessive amount of output data, etc.
Practice Oriented Nonlinear Analysis (PONLA) procedures, however, have become extremely popular during the last decade due to practical appeal of the pushover concept by structural engineers and the direct use of elastic response spectrum tool in a nonlinear assessment practice. In fact, it is much easier to explain the essentials of deformation-based assessment to the engineers with a pushover concept. Deformation-based approach can be presented as an opposite to the strength-based approach, where the capacity curve is obtained from the nonlinear pushover analysis followed by an appropriate coordinate transformation. Thus yield strength of the equivalent SDOF system and the yield reduction factor is directly obtained from a nonlinear analysis, not as a result of target ductility assumption as in the strength-based approach. Once the yield reduction factor is calculated, peak inelastic displacement response of the nonlinear equivalent SDOF system, i.e., inelastic spectral displacement can be readily obtained from the elastic spectral displacement by utilizing an appropriate \({{\upmu }} - R_{\textrm{y}} - T\) relationship. Following the calculation of the peak inelastic displacement response of the nonlinear equivalent SDOF system, peak inelastic response quantities of MDOF system, i.e., plastic hinge rotations or plastic strains are readily obtained from the corresponding pushover analysis output. Internal forces associated with the brittle failure modes are also calculated.
It is clear that deformation-based seismic assessment procedure is particularly suitable for the seismic evaluation of existing buildings, bridges and other structures, as the engineer is directly able to calculate the inelastic seismic demand quantities corresponding to the seismic damage to occur in the structural system. The assessment is finalized by checking whether seismic demand quantities remain within the limits of acceptance criteria, i.e., limiting values of plastic hinge rotations or plastic strains specified for various performance objectives.
Practice Oriented Nonlinear Analysis (PONLA) procedures are based on single-mode or multi-mode pushover analysis, which will be covered in the subsequent parts of this contribution. When rigorous Nonlinear Response History Analysis (NLRHA) procedure is used, inelastic seismic demand quantities, e.g., plastic hinge rotations, are directly obtained from the analysis output.
2.2.1 Reshaping Engineers’ Minds for Nonlinear Seismic Behavior: From University Education to Professional Training
The above-given arguments and recent developments in earthquake engineering dictate that we can no longer escape from the nonlinear seismic performance assessment of existing structures. However as pointed out above, we, civil and structural engineers all over the world, are all “linear engineers”, who generally feel themselves at odds with the analytical aspects of the nonlinear analysis methods in spite of the worldwide availability of pushover-based simple nonlinear analysis software. Most engineers often think of even the simple single-mode pushover analysis as a complex and difficult-to-understand procedure. In other words, they are not aware how the procedure is actually handled in the computer programs and hence the pushover analysis is still treated as a black box.
It is clear that we need a conceptual transformation towards nonlinear response analysis in both university education and professional training. A rational university curriculum needs to be developed. In the short run, a straightforward professional training model may be based on a simple plastic hinge concept for nonlinear modeling and piecewise linear hinge-by-hinge incremental analysis of the system under equivalent seismic loads without nonlinear iteration, which will be demonstrated subsequently in this contribution.
2.2.2 “Linear Engineers” Strikes Back: Fallacy of Equivalent Linear Response with a Fictitious Damping
While the need for a conceptual transformation is stressed for a realistic understanding of the nonlinear behavior in seismic response, there are counter attacks from the proponents of “linear engineering”, who prefer to hide the nonlinear nature of the seismic response and present it as if it were a linear response based on a secant stiffness combined with a fictitious damping to imitate the nonlinear response. In fact many people with minds resting on this fallacy interpret the effect of an increasing nonlinearity as nothing but an increase in viscous damping of the structural system.
The underlying theory is based on Jacobsen’s well known equivalent damping concept (see standard textbooks, e.g. Chopra, 2001). To some people this is perfectly legitimate. But many see it as the distortion of the concept of real nonlinear behavior in seismic response. This artificial treatment of nonlinearity may be viewed as the imprisonment of the engineer’s mind behind the bars of linearity. It is ironic to note that a recently introduced new seismic design methodology by Priestley et al. (2007) is totally based on equivalent linear response concept where design response spectra are defined for very long periods and very high artificial damping factors.
2.2.3 Nonlinear Modeling and Acceptance Criteria in Deformation-Based Seismic Assessment
The first critical stage of any nonlinear analysis is the modeling of nonlinear properties. In principle, the same nonlinear model can be used in both Nonlinear Response History Analysis (NLRHA) and Practice Oriented Nonlinear Analysis (PONLA).
2.2.3.1 Concentrated Plasticity Approach
Concentrated (lumped) plasticity and distributed plasticity are the two main approaches used for nonlinear modeling. The former is represented by the simplest and most popular model based on plastic hinges, which are zero-length elements through which the nonlinear behavior is assumed to be concentrated or lumped at predetermined sections. A typical plastic hinge is ideally located at the centre of a plastified zone called plastic hinge length, which are generally defined at the each end of a clear length of a beam or column. A one-component plastic hinge model with or without strain hardening can be appropriately used to characterize a bi-linear moment-curvature relationship (Filippou and Fenves, 2004). The so-called normality criterion of the classical plasticity theory can be used to account for the interaction between plastic axial and bending deformation components (Jirasek and Bazant, 2001).
Plastic hinge concept is ideally suited to the piecewise linear representation of concentrated nonlinear response. Linear behavior is assumed in between the predetermined plastic hinge sections as well as temporally in between the formation of two consecutive plastic hinges. As part of a piecewise linearization process, the yield surfaces of plastic hinge sections may be appropriately linearized, i.e., they may be represented by finite number of yield lines and yield planes in two- and three-dimensional hinge models, i.e., in the so-called PM hinges and PMM hinges, respectively.
In Practice Oriented Nonlinear Analysis (PONLA) procedures based on pushover analysis, modeling of backbone curves of typical moment-rotation relationships of plastic sections are sufficient for nonlinear modeling. Typical bi-linear backbone curves with and without strength-degradation have been specified in the applicable codes (e.g., ASCE, 2007). In the Nonlinear Response History Analysis (NLRHA), cyclic hysteretic behavior of plastic hinge is additionally required to be defined. Standard bi-linear model with parallel loading and unloading branches, peak-oriented model with or without pinching and Takeda type models are the most well-known hinge hysteretic models. The so-called Ibarra-Krawinkler model is recently developed as the most advanced general model to simulate the hysteretic behavior of reinforced concrete and steel hinges (Ibarra and Krawinkler, 2005).
Acceptance criteria for plastic hinge response is generally defined in terms plastic rotation capacities, which are specified in the relevant codes, e.g., ASCE 41 (2007) and Eurocode 8-, Part 3 (CEN, 2005). On the other hand, concrete compressive strain and rebar steel strain capacities have been specified in the recent Turkish Code (MPWS, 2007) as acceptance criteria, which are to be compared with strain demands obtained from plastic hinge rotation demands.
2.2.3.2 Distributed Plasticity Approach
The fiber model is the most popular distributed plasticity model being used for the nonlinear modeling, where cross section of the structural element is subdivided into concrete fibers and steel fibers (Spacone et al., 1996; Filippou and Fenves, 2004; CSI, 2006). Since the response is obtained in terms of uniaxial deformation of the fibers, the load versus deformation response of a fiber model is defined in terms of uniaxial stress-strain relations specified for concrete and reinforcement. Various material models are available in the literature, e.g., Orakcal and Wallace (2004) for concrete, Menegotto and Pinto (1973) for steel.
Although fiber model is more advanced compared to plastic hinge model, its use in beams and columns is not warranted from practical viewpoint. In such elements, abundance of test data regarding stiffness modeling and rotation capacities leads instead to a wider use of the plastic hinge modeling. Fiber model, however, is more appropriate in flexural walls of rectangular and U or L shapes in plan. Acceptance criteria may be specified in terms of concrete and steel strain capacities or compatible plastic hinge rotations.
In addition to plastic hinge and fiber models, as briefly described above, more rigorous nonlinear finite element models are also available. However for the time being, such models are not very suitable for practical applications.
3 Rigorous Nonlinear Analysis Procedure: Nonlinear Response-History Analysis
Nonlinear Response-History Analysis (NLRHA) procedure is the most advanced and precise procedure to obtain inelastic demand quantities. The procedure is based on the direct, step-by-step integration of coupled equations of motion of the MDOF structural system.
It has to be admitted that NLRHA is still far from a routinely used procedure in the practical seismic assessment and design process. As indicated above, the obstacles of a wider use of NLRHA in engineering practice include the difficulties in selection and scaling of ground motion input data, excessive computer hardware and run time requirements, lack of availability of reliable software in sufficient numbers to choose from, problems associated with the construction of damping matrix, difficult post-processing requirements of excessive amount of output data, etc. However, a very rapid progress is currently taking place to reduce, if not completely eliminate, such obstacles. It appears that in a few years time, the problems related to excessive run-time requirements will be avoided with the significant developments to occur in computer hardware industry. Although currently only a couple of reliable software is available, it is expected that the growing demand would accelerate the competition in this field.
Selecting and scaling the input motion still appear to be a problematic area where more research is needed. In the current practice, at least three or seven ground motion records are needed to be run. In the former case the maximum results and in the latter case mean values obtained from seven analyses are considered as the governing seismic demand quantities. There is no doubt that such number of selected ground motions is not sufficient to obtain statistically meaningful results. Maximum or mean values of response quantities may be very unreliable, depending on the ground motion selection and scaling process. It is expected that numbers of selected ground motions will be significantly increased in the near future with the developments in computer hardware for a meaningful statistical evaluation.
4 Practice-Oriented Nonlinear Analysis Procedures Based on Pushover Analysis
In the last two decades, a significant progress has been achieved in the seismic assessment and design of structures with the development of Practice-Oriented Nonlinear Analysis (PONLA) procedures based on the so-called pushover analysis.
All pushover analysis procedures can be considered as approximate extensions of the modal response spectrum method to the nonlinear response analysis with varying degrees of sophistication. For example, Nonlinear Static Procedure – NSP (ATC, 1996; ASCE, 2007) may be looked upon as a single-mode inelastic response spectrum analysis procedure where the peak response can be obtained through a nonlinear analysis of a modal single-degree-of-freedom (SDOF) system. In practical applications, modal peak response can be appropriately estimated through inelastic displacement spectrum (ASCE, 2007; CEN, 2005).
In the following sections, pushover analysis methods will be evaluated in detail. It is believed that in spite of its shortcomings, pushover analysis is a practice-oriented procedure in the right direction to help familiarize the practicing engineers with rational estimation of seismic damage.
4.1 Historical Evolution of Pushover Analysis: From “Capacity Analysis” to “Capacity-and-Demand Analysis”
From a historical perspective, pushover analysis has always been understood as a nonlinear capacity estimation tool and generally called as capacity analysis. The nonlinear structure is monotonically pushed by a set of forces with an invariant distribution until a predefined displacement limit at a given location (say, lateral displacement limit at the roof level of a building) is attained. Such predefined displacement limit is generally termed target displacement. The structure may be further pushed up to the collapse state in order to estimate its ultimate deformation and load carrying capacities. It is for this reason that pushover analysis has been also called as collapse analysis.
However, in view of performance-based seismic assessment and design requirements, the above definition is not sufficient. According to the improved concept introduced by Freeman et al. (1975) and Fajfar and Fischinger (1988), which was subsequently adopted in ATC 40 (1996), FEMA 273 (1997), FEMA 356 (2000) and Eurocode 8 (CEN, 2004, 2005), pushover analysis with its above-given historical definition represents only the first stage of a two-stage nonlinear static procedure, where it simply provides the nonlinear capacity curve of an equivalent single-degree-of-freedom (SDOF) system. The peak response, i.e., seismic demand is then estimated through nonlinear analysis of this equivalent SDOF system under a given earthquake or through an inelastic displacement spectrum. In this sense the term pushover analysis now includes as well the estimation of the so-called target displacement. Eventually, controlling seismic demand parameters, such as plastic hinge rotations, are obtained and compared with the specified limits (acceptance criteria) to verify the performance of the structure according to a given performance objective under a given earthquake. Thus according to this broader definition, pushover analysis is not only a capacity estimation tool, but at the same time it is a demand estimation tool.
It is interesting to note that majority of the new pushover analysis procedures developed in the last decade, particularly those dealing with multi-mode response, belong to capacity estimation category, which will be briefly evaluated later in this contribution.
4.2 Piecewise Linear Relationships for Modal Equivalent Seismic Loads and Displacements
Piecewise linear representation of pushover analysis, which provides a non-iterative solution technique with an adaptive load or displacement pattern, has been introduced by Aydınoğlu (2003, 2005, 2007). At each pushover step in between the formation of two consecutive plastic hinges, structural system can be considered to be piecewise linear. Accordingly, relationships between the coordinates of modal capacity diagrams (i.e., modal displacement and modal pseudo-acceleration of modal SDOF systems) versus the corresponding response quantities of the MDOF system can be expressed as in the following.
Piecewise linear relationship between n’th modal displacement increment, \({\Delta }d_{\textrm{n}}^{{\textrm{(i)}}}\), and the corresponding displacement increment of MDOF system, \({\boldsymbol \Delta} {\mathop{\mathbf{u}}\nolimits} _{\textrm{n}}^{{\textrm{(i)}}}\), at (i)’th pushover step is
where \({\boldsymbol \Phi}_{\textrm{n}}^{{\textrm{(i)}}}\) represents the instantaneous mode shape vector and \(\Gamma _{{\textrm{xn}}}^{{\textrm{(i)}}}\) denotes the participation factor for the n’th mode at the (i)’th step for an earthquake in x direction, which is expressed as
in which M is the lumped mass matrix and \({\textbf{\i}}_{\textbf{x}}\) represents the ground motion influence vector for an x direction earthquake. Instantaneous mode shape vector \({\boldsymbol \Phi}_{\textrm{n}}^{{\textrm{(i)}}}\) is obtained from the solution of the eigenvalue problem:
in which the elements of the second-order stiffness matrix, i.e., \({\mathop{\bf K}\nolimits} ^{{\textrm{(i)}}}\) and \({\mathop{\bf K}\nolimits} _{\textrm{G}}^{{\textrm{(i)}}}\) represent the first-order stiffness matrix and geometric stiffness matrix, respectively. \({{\upomega }}_{\textrm{n}}^{{\textrm{(i)}}}\) is the instantaneous natural circular frequency. The equivalent modal seismic load increment, \({\boldsymbol \Delta} {\mathop{\bf f}\nolimits} _{\textrm{n}}^{{\textrm{(i)}}}\), representing the n’th mode capacity increment of the structure is given by
from which piecewise linear relationship between n’th modal pseudo-acceleration increment and the corresponding equivalent seismic load increment of MDOF system at (i)’th pushover step can be expressed in the familiar form as
where \({\Delta }a_{\textrm{n}}^{{\textrm{(i)}}}\) represents modal pseudo-acceleration increment, defined as
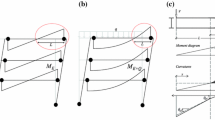
In monotonic pushover response, cumulative values of modal displacement and modal pseudo-acceleration, i.e., the coordinates of modal capacity diagrams (see Figs. 8.1 and 8.2) can be written for the end of the (i)’th step as

Estimating modal displacement demand

Scaling of modal displacements through monotonic scaling of response spectrum
Implementation of pushover analysis can be based on either a monotonic increase of displacements given by Eq. (1) or equivalent seismic loads given by Eq. (5). These correspond to displacement-controlled and force-controlled pushovers, respectively.
4.3 Single-Mode Pushover Analysis: Piecewise Linear Implementation with Adaptive and Invariant Load Patterns
Single-mode piecewise linear pushover procedure is applicable to low-to-medium rise regular buildings whose response is effectively controlled by the first (predominant) mode. Slight torsional irregularities may be allowed provided that a 3-D structural model is employed.
Single-mode pushover analysis can be performed as an incremental analysis, for which no iterative solution is required. This is the analysis scheme that can be easily grasped by “linear” practicing engineers.
4.3.1 Adaptive Load or Displacement Patterns
In the case of adaptive patterns, first-mode counterpart of equivalent seismic load increment given in Eq. (5) can be written for the (i)’th pushover step as
where \({\bar{\bf m}}_{\textrm{1}}^{{\textrm{(i)}}}\) represents the vector of participating modal masses effective in the first mode. Superscript (i) on the participating modal mass and mode shape vectors as well as on the modal participation factor indicates that instantaneous first-mode shape corresponding to the current configuration of the structural system is considered following the formation of the last plastic hinge at the end of the previous pushover step. In adaptive case, a fully compatible modal expression can be written from Eq. (1) for the increment of displacement vector as well:
Since both \({\boldsymbol \Delta} {\mathop{\bf u}\nolimits} _{\textrm{1}}^{{\textrm{(i)}}}\) and \({\boldsymbol \Delta} {\mathop{\bf f}\nolimits} _{\textrm{1}}^{{\textrm{(i)}}}\) are based on the same instantaneous modal quantities, there is a one-to-one correspondence between them. Thus, adaptive implementation of the single-mode pushover analysis can be based on either a monotonic increase of displacements or equivalent seismic loads, leading to displacement-controlled or load-controlled analyses.
4.3.2 Invariant Load Pattern
In the case of invariant load pattern, Eq. (8) is modified as
where the vector of first-mode participating modal masses, \(\bar{\bf m}_{\textrm{1}}^{{\textrm{(1)}}}\),is defined at the first linear pushover step (i = 1) and retained invariant during the entire course of pushover history. Note that inverted triangular or even height-wise constant amplitude mode shapes have been used in practice (FEMA, 2000) in place of \({\boldsymbol \Phi}_{\textrm{1}}^{{\textrm{(1)}}}\). Currently ASCE 41 (2007) solely requires the use of \({\boldsymbol \Phi}_{\textrm{1}}^{{\textrm{(1)}}}\).
4.3.3 Load-Controlled Piecewise Linear Pushover-History Analysis
In load-controlled piecewise linear pushover history analysis, equivalent seismic load vector of the MDOF system, which could have either adaptive or invariant pattern, is increased monotonically in increments of \({\boldsymbol \Delta} {\mathop{\bf f}\nolimits} _{\textrm{1}}^{{\textrm{(i)}}}\) where modal pseudo-acceleration increment, \({\Delta }a_{\textrm{1}}^{{\textrm{(i)}}}\), is calculated as the single unknown quantity at each (i)’th pushover step leading to the formation of a new hinge.
In the case of using adaptive load pattern, once \({\Delta }a_{\textrm{1}}^{{\textrm{(i)}}}\) is calculated for a given step, the corresponding modal displacement increment, \({\Delta }d_{\textrm{1}}^{{\textrm{(i)}}}\) can be obtained from Eq. (6) for n = 1. Cumulative modal displacement and modal pseudo-acceleration at each step can then be calculated from Eq. (7). Thus, modal capacity diagram can be directly plotted without plotting and then converting the pushover curve.
In the case of an invariant pattern, modal equivalent loads and resulting displacement increments are not compatible with respect to modal parameters. In this case, modal displacement increment is calculated through Eq. (9), by specializing it for the roof displacement increment with the corresponding first-mode shape amplitude of the first pushover step.
4.3.4 Displacement-Controlled Piecewise Linear Pushover-History Analysis
In displacement-controlled piecewise linear pushover history analysis, adaptive displacement vector of the MDOF system is increased monotonically in increments of \({\boldsymbol \Delta}{\mathop{\bf u}\nolimits} _{\textrm{1}}^{{\textrm{(i)}}}\) where modal displacement increment, \({\Delta }d_{\textrm{1}}^{{\textrm{(i)}}}\), is calculated as the single unknown quantity at each (i)’th pushover step leading to the formation of a new hinge. Once \({\Delta }d_{\textrm{1}}^{{\textrm{(i)}}}\) is calculated for a given step, the corresponding modal pseudo-acceleration increment, \({\Delta }a_{\textrm{1}}^{{\textrm{(i)}}}\) can be obtained from Eq. (6) for n = 1. Cumulative modal displacement and modal pseudo-acceleration at each step can then be calculated from Eq. (7). As in load-controlled adaptive analysis, modal capacity diagram can be directly plotted without plotting the pushover curve.
4.3.5 Estimation of Modal Displacement Demand: Inelastic Spectral Displacement
When the last pushover step is reached, the modal displacement at the end of this step, \(d_{\textrm{1}}^{{\textrm{(p)}}}\) (indicated by superscript p for peak), is effectively equal to first-mode inelastic spectral displacement, \(S_{{\textrm{di,1}}}\), which may be calculated for a given ground motion record through nonlinear analysis of the modal SDOF system. The analysis is performed by considering the hysteresis loops defined according to modal capacity diagram taken as the backbone curve.However for practical purposes, inelastic first-mode spectral displacement, \(S_{{\textrm{di,1}}}\), can be appropriately defined through a simple procedure based on equal displacement rule:
in which \(S_{{\textrm{de,1}}}\) represents the elastic spectral displacement of the corresponding linear SDOF system with the same period (stiffness) of the initial period of the bilinear inelastic system. \(C_{{\textrm{R,1}}}\) refers to spectral displacement amplification factor, which is specified in seismic codes through empirical formulae (FEMA, 2000; MPWS, 2007; ASCE, 2007).
Note that in practice cracked section stiffnesses are used in reinforced concrete systems throughout the pushover analysis and therefore the fundamental period of the system calculated at the first linear pushover step (i = 1) is taken as the initial period of the bilinear inelastic system. This is contrary to the traditional approach where fundamental period is further lengthened excessively due to bi-linearization of modal capacity diagram. In Fig. 8.1, modal capacity diagram and the elastic response spectrum are combined in a displacement – pseudo-acceleration format, where \(T_{\textrm{S}}\) refers to characteristic spectrum period at the intersection of constant velocity and constant acceleration regions.
4.4 Multi-Mode Pushover Analysis
Single-mode pushover analysis can be reliably applied to only two-dimensional response of low-rise building structures regular in plan or simple regular bridges, where the seismic response is essentially governed by the fundamental mode. There is no doubt that application of single-mode pushover to high-rise buildings or any building irregular in plan as well as to irregular bridges involving three-dimensional response would lead to incorrect, unreliable results. Therefore, a number of improved pushover analysis procedures have been offered in the last decade in an attempt to take higher mode effects into account (Gupta and Kunnath, 2000; Elnashai, 2002; Antoniou et al., 2002; Chopra and Goel, 2002; Kalkan and Kunnath, 2004; Antoniou and Pinho, 2004a, b). In this context, Incremental Response Spectrum Analysis (IRSA) procedure has been introduced as a direct extension of the traditional linear Response Spectrum Analysis (RSA) procedure (Aydınoğlu, 2003, 2004).
With reference to the above-mentioned differentiation in identifying pushover analysis as a capacity estimation tool only or a capacity-and-demand estimation tool, it is observed that among the various multi-mode methods appeared in the literature during the last decade, only two procedures, i.e., Modal Pushover Analysis (MPA) introduced by Chopra and Goel (2002) and Incremental Response Spectrum Analysis (IRSA) by Aydınoğlu (2003, 2004) are able to estimate the seismic demand under a given earthquake ground motion. Others have actually dealt with structural capacity estimation only, although this important limitation has been generally overlooked. Those procedures have generally utilized the elastic response spectrum of a specified earthquake, not for the demand estimation, but only for scaling the relative contribution of vibration modes to obtain seismic load vectors (Gupta and Kunnath, 2000; Elnashai, 2002; Kalkan and Kunnath, 2004; Antoniou and Pinho, 2004a) or to obtain displacement vectors (Antoniou and Pinho, 2004b) through modal combination. Generally, building is pushed to a selected target displacement that is actually predefined by a nonlinear response history analysis (Gupta and Kunnath, 2000; Kalkan and Kunnath, 2004). Alternatively a pushover analysis is performed for a target building drift and the earthquake ground motion is scaled in nonlinear response history analysis to match that drift (Antoniou and Pinho, 2004a, b). Therefore results are always presented in a relative manner, generally in the form of story displacement profiles or story drift profiles where pushover and nonlinear response history analysis results are superimposed for a matching target displacement or a building drift. Thus, such pushover procedures are able to estimate only the relative distribution of displacement and deformation demand quantities, not their magnitudes and hence their role in the deformation-based seismic evaluation/design scheme is questionable.
Various multi-mode pushover analysis procedures developed in the last decade are systematically evaluated in the following sub-sections with consistent terminology and notation.
4.4.1 Modal Scaling
Referring to piecewise linear relationships for modal equivalent seismic loads and displacements given in Section 8.4.2, it is clear that in order to define modal MDOF response, modal displacement increments \({\Delta }d_{\textrm{n}}^{{\textrm{(i) }}}\) or modal pseudo-acceleration increments \({\Delta }a_{\textrm{n}}^{{\textrm{(i) }}}\) have to be determined in all modes at each pushover step, depending on whether displacement- or force-controlled pushover is applied. Since just a single plastic hinge forms and therefore only one yield condition is applicable at the end of each piecewise linear step, a reasonable assumption needs to be made for the relative values of modal displacement or modal pseudo-acceleration increments, so that the number of unknowns is reduced to one. This is called modal scaling, which is the most critical assumption to be made in all multi-mode pushover procedures. In this respect the only exception is the Modal Pushover Analysis – MPA (Chopra and Goel, 2002) where modal coupling is completely disregarded in the formation of plastic hinges and therefore modal scaling is omitted.
4.4.1.1 Modal Scaling Based on Instantaneous or Initial Elastic Spectral Quantities
As it is mentioned above, modal scaling is probably the most critical and at the same time one of the most controversial issues of the multi-mode pushover analysis. In a number of studies, such as Gupta and Kunnath (2000), Elnashai (2002), Antoniou et al. (2002), Antoniou and Pinho (2004a), force-controlled pushover is implemented based on Eq. (5) where modal scaling is performed on instantaneous modal pseudo-accelerations. Using consistent terminology and notation, such a modal scaling can be expressed as
where \(S_{{\textrm{aen}}}^{{\textrm{(i)}}}\) represents the instantaneous n’th mode elastic spectral pseudo-acceleration at the (i)’th pushover step and \({\Delta}\stackrel{\frown}{F} ^{{\textrm{(i)}}}\) refers to an incremental scale factor, which is independent of the mode number. Thus Eq. (12) means that modal pseudo-acceleration increments are scaled in proportion to the respective elastic spectral accelerations. Note that the above defined modal scaling is essentially identical to scaling of modal displacement increments in proportion to respective instantaneous elastic spectral displacements in a displacement-controlled pushover implementation based on Eq. (1), which may be expressed as
where \(S_{{\textrm{den}}}^{{\textrm{(i)}}}\) represents the instantaneous n’th mode elastic spectral displacement corresponding to above-given \(S_{{\textrm{aen}}}^{{\textrm{(i)}}}\), i.e., \(S_{{\textrm{aen}}}^{{\textrm{(i)}}} {{ = (\upomega }}_{\textrm{n}}^{{\textrm{(i)}}} {\textrm{)}}^{{\textrm{2 }}} S_{{\textrm{den}}}^{{\textrm{(i)}}}\). Such a scaling has been used in a displacement-controlled pushover procedure (Antoniou and Pinho, 2004b).
It is doubtful whether this type of modal scaling should be implemented for a nonlinear response. In fact instantaneous elastic spectral parameters have no relation at all with the instantaneous nonlinear modal response increments. When the structure softens due to accumulated plastic deformation, the instantaneous elastic spectral displacement of the first mode would increase disproportionately with respect to those of the higher modes, leading to an exaggeration of the effect of the first-mode in the hinge formation process prior to reaching the peak response.
Note that a modal scaling scheme similar to the one expressed by Eq. (12) have been prescribed in FEMA 356 document (2000) where modal pseudo-acceleration increments were scaled in proportion to the initial elastic spectral accelerations:
where \(S_{{\textrm{aen}}}^{{\textrm{(1)}}}\) represents the instantaneous n’th mode elastic spectral pseudo-acceleration at the first linear pushover step, which is retained invariant during pushover analysis along with the invariant mode shapes and participation factors defined for the first pushover step. Such a multi-mode invariant scheme is even more controversial than the adaptive scheme explained above with the instantaneous modal parameters. This highly approximate scheme was removed from the practice with ASCE 41 (2007), however it is still important as it represents one of the early schemes in the development of multi-mode pushover procedures, which will be summarized in Sections 8.4.4.2, 8.4.4.3, 8.4.4.4, 8.4.4.5, 8.4.4.6, and 8.4.4.7.
4.4.1.2 Modal Scaling Based on Instantaneous Inelastic Spectral Displacements and Application of “Equal Displacement Rule”
Displacement-controlled pushover based on Eq. (1) is the preferred approach in Incremental Response Spectrum Analysis – IRSA (Aydınoğlu, 2003, 2004), in which modal pushovers are implemented simultaneously by imposing instantaneous displacement increments of MDOF system at each pushover step.
In principle, modal displacements are scaled in IRSA with respect to inelastic spectral displacements, \(S_{{\textrm{din}}}^{{\textrm{(i)}}}\), associated with the instantaneous configuration of the structure (Aydınoğlu, 2003). This is the main difference from the other studies referred to above where modal scaling is based on instantaneous elastic spectral pseudo-accelerations or displacements. IRSA’s adoption of inelastic spectral displacements for modal scaling is based on the notion that those spectral displacements are nothing but the peak values of modal displacements to be reached.
In practice, modal scaling based on inelastic spectral displacements can be easily achieved by taking advantage of the equal displacement rule. Assuming that seismic input is defined via smoothed elastic response spectrum, according to this simple and well-known rule, which is already utilized above for the estimation of modal displacement demand in single-mode pushover, peak displacement of an inelastic SDOF system and that of the corresponding elastic system are assumed practically equal to each other provided that the effective initial period is longer than the characteristic period of the elastic response spectrum. The characteristic period is approximately defined as the transition period from the constant acceleration segment to the constant velocity segment of the spectrum. For periods shorter than the characteristic period, elastic spectral displacement is amplified using a displacement modification factor, i.e., C 1 coefficient given in FEMA 356 (2000). However such a situation is seldom encountered in mid- to high-rise buildings and long bridges involving multi-mode response. In such structures, effective initial periods of the first few modes are likely to be longer than the characteristic period and therefore those modes automatically qualify for the equal displacement rule. On the other hand, effective post-yield slopes of the modal capacity diagrams get steeper and steeper in higher modes with gradually diminishing inelastic behavior (Fig. 8.2). Thus it can be comfortably assumed that inelastic spectral displacement response in higher modes would not be different from the corresponding spectral elastic response.
Hence, smoothed elastic response spectrum may be used in its entirety for scaling modal displacements without any modification. As in single-mode analysis, in reinforced concrete buildings elastic periods calculated at the first pushover step may be considered in lieu of the initial periods obtained from bi-linearization of modal capacity diagrams (see Fig. 8.1(b)).
In line with the equal displacement rule, scaling procedure applicable to n’th mode increment of modal displacement at the (i)’th pushover step is expressed as
where \({\Delta }\tilde F^{{\textrm{(i)}}}\) is an incremental scale factor, which is applicable to all modes at the (i)’th pushover step. \(S_{{\textrm{den}}}^{{\textrm{(1)}}}\) represents the initial elastic spectral displacement defined at the first step (Fig. 8.2), which is taken equal to the inelastic spectral displacement associated with the instantaneous configuration of the structure at any pushover step. Cumulative modal displacement and the corresponding cumulative scale factor at the end of the same pushover step can then be written as
Note that modal scaling expressions given above correspond to a monotonic increase of the elastic response spectrum progressively at each step with a cumulative scale factor starting from zero until unity. Physically speaking, the structure is being pushed such that at every pushover step modal displacements of all modes are increased by increasing elastic spectral displacements defined at the first step (i = 1) in the same proportion according to equal displacement rule until they simultaneously reach the target spectral displacements on the response spectrum. Shown in Fig. 8.2 are the scaled spectra corresponding to the first yield, to an intermediate pushover step (\(\tilde F^{{\textrm{(i)}}}\) < 1) and to the final step (\(\tilde F^{{\textrm{(i)}}} = 1\)), which are plotted in ADRS (Acceleration-Displacement Response Spectrum) format and superimposed onto modal capacity diagrams. It is worth warning that equal displacement rule may not be valid at near-fault situations with forward directivity effect.
4.4.2 Single-Run Pushover Analysis with Invariant Combined Single-Load Pattern
Pushover analysis performed with a single-load pattern that accounts for elastic higher mode effects is one of the procedures recommended in FEMA 356 (2000). In this procedure, the equivalent seismic loads defining the load pattern to be applied to a structure is calculated from the story shears determined by linear response spectrum analysis (RSA) through modal combination. Resultant load pattern is assumed invariant throughout the pushover analysis.
In this case modal pseudo-acceleration increments are scaled in proportion to the initial elastic spectral accelerations as given in Eq. (14). Substituting into Eq. (5) and considering initial elastic modal properties,
Combined story shear vector obtained from RSA and a typical j’th story shear calculated by SRSS rule can then be expressed as
and finally combined invariant load pattern defined is defined as
Pushover analysis is run under the above-defined combined single-load invariant pattern of the equivalent seismic loads, and the resultant single pushover curve is plotted as usual. Note that definition of combined invariant load pattern based on elastic seismic loads yields to a highly controversial result. While on one hand the resultant capacity diagram of the equivalent SDOF system is deemed to represent all modes considered, on the other hand it is treated as if it was a capacity diagram of a single mode (first – dominant mode) in the estimation of inelastic peak displacement of the equivalent SDOF system through C1 displacement modification coefficient of FEMA 356 (2000). It is clear that this procedure can estimate neither SDOF nor MDOF system inelastic response accurately. It can be identified only as a highly approximate capacity estimation tool. For this reason the procedure specified in FEMA 356 (2000) was later removed from ASCE 41 (2007) document.
4.4.3 Single-Run Pushover Analysis with Adaptive Combined Single-Load Patterns
Similar to above-given invariant single-run pushover procedure, an alternative multi-mode pushover analyses based on adaptive single-load patterns have been proposed by Elnashai (2002), Antoniou et al. (2002) and Antoniou and Pinho (2004a). In these force-controlled pushover procedures, equivalent modal seismic load increments, consistent with the instantaneous mode shapes, are calculated at each pushover step based on instantaneous stiffness state of the structure, and modal pseudo-acceleration increments are scaled in proportion to the respective instantaneous elastic spectral accelerations as expressed by Eq. (12):
Then equivalent seismic loads are combined (for example with SRSS rule) at each step to obtain single load patterns. Combined load vector and a typical j’th story load can then be expressed as
As similar to above-described invariant single-run pushover procedure, pushover analysis is run under the combined single-load adaptive pattern of the equivalent seismic loads until a prescribed target roof displacement. The analysis is terminated by plotting the resultant single pushover curve.
The main drawback of this procedure is that it is short of providing the essential output required for seismic performance assessment, i.e., it cannot estimate the inelastic seismic demand quantities under a given earthquake ground motion. Instead, as indicated in Section 8.4.4, target displacements are predefined through inelastic time history analyses of the MDOF systems. Alternatively pushover analysis is performed for a target building drift and the earthquake ground motion is scaled in nonlinear response history analysis to match that drift (Antoniou and Pinho, 2004a, b). Thus this procedure can only be treated as an improved capacity estimation tool, rather than a demand estimation tool under a given earthquake ground motion, as required in seismic performance assessment.
On the other hand, when P-delta effects are included in pushover analysis, pushover curve gradually descends after a certain step. Previously formed plastic hinges and P-delta effects lead to a negative-definite second-order stiffness matrix starting with that step, where eigenvalue analysis results in a negative eigenvalue and eventually an imaginary natural vibration frequency for the first mode or first few modes. As there is no physical meaning of an imaginary natural frequency, natural vibration periods and corresponding instantaneous spectral accelerations can not be estimated. Thus, multi-mode pushover analyses utilizing modal scaling procedure based on instantaneous spectral quantities have to be terminated without reaching the target displacement. This is an important limitation of the modal scaling procedure based on the instantaneous elastic spectral quantities when P-delta effects are considered in the analysis.
4.4.4 Single-Run Pushover Analysis with Adaptive Combined Single-Displacement Patterns
Antoniou and Pinho (2004b) presented a displacement-controlled adaptive pushover procedure (DAP) to avoid the drawbacks of force-controlled adaptive pushover procedure (FAP) described in the previous sub-section. In this procedure, displacement increments of the MDOF system, consistent with the instantaneous mode shapes, are calculated at each pushover step based on instantaneous stiffness state of the structure, and modal displacement increments are scaled in proportion to the respective instantaneous elastic spectral displacements as expressed by Eq. (13):
This is followed by the calculation of story drifts as,
which are then combined (for example with SRSS rule) at each step for a story drift pattern:
Finally a single-displacement pattern is obtained by successively summing up the story drift pattern:
In this case, pushover analysis is run by imposing the combined single-displacement adaptive pattern to the building until a prescribed target roof displacement. The analysis is terminated by plotting the resultant single pushover curve.
Although displacement-controlled DAP appears to be more meaningful than its force-controlled counterpart (FAP), it suffers from exactly the same problems indicated in the previous sub-section, which will not be repeated here.
4.4.5 Simultaneous Multi-Mode Pushover Analyses with Adaptive Multi-Mode Load Patterns: Adaptive Spectra-Based Pushover Procedure
In a force-controlled adaptive pushover procedure developed by Gupta and Kunnath (2000), multi-modal load patterns are defined exactly in the same way the other force-controlled procedures. It means equivalent modal seismic load increments, consistent with the instantaneous mode shapes, are calculated at each pushover step based on instantaneous stiffness state of the structure, and modal pseudo-acceleration increments are scaled in proportion to the respective instantaneous elastic spectral accelerations as expressed by Eq. (12):
which is nothing but the modal load expression given by Eq. (20). The main difference of this procedure is that the above-defined modal loads are not combined as opposed to other force-controlled procedures. Instead they are applied incrementally in each mode individually to the structural system and the increments of modal response quantities of interest including the coordinates of the pushover curve are calculated at each step, followed by modal combination by SRSS.
This approach is more meaningful compared to other procedures described above, as the conventional response spectrum analysis is actually being applied at each step. However, use of instantaneous spectral accelerations in modal scaling, as given in Eq. (12) and applied to Eq. (26), impairs the procedure for the consistent estimation of the inelastic seismic demands. For this reason, Gupta and Kunnath (2000) had to compare the story drifts estimated by this procedure at an equal roof displacement obtained from a nonlinear response-history analysis. As in the others, this procedure suffers as well from the improper representation of P-Delta effects.
As with the others given above, this procedure also can be treated as an improved capacity estimation tool only, rather than a demand estimation tool under a given earthquake ground motion.
4.4.6 Simultaneous Multi-Mode Pushover Analyses with Adaptive Multi-Mode Displacement Patterns: Incremental Response Spectrum Analysis (IRSA)
In a displacement-controlled adaptive procedure developed by Aydınoğlu (2003, 2004, 2007), piecewise linear relationship between n’th modal displacement increment, \({\Delta }d_{\textrm{n}}^{{\textrm{(i)}}}\), and the corresponding displacement increment of MDOF system, \({\boldsymbol \Delta} {\mathop{\bf u}\nolimits} _{{\bf n}}^{{{\bf (i)}}}\), at (i)’th pushover step is expressed as given by Eq. (1). At the same time modal displacement increment, \({\Delta }d_{\textrm{n}}^{{\textrm{(i)}}}\) is scaled at each step with an instantaneous inelastic spectral displacements. As explained in sub-section “Modal Scaling Based on Instantaneous Inelastic Spectral Displacements and Application of “Equal Displacement Rule”” above, this is achieved by utilizing the well-known equal displacement rule, which simplifies the modal scaling as given by Eq. (15). Substituting into Eq. (1) leads to the following expression for the displacement vector increment in the n’th mode at the (i)’th pushover step:
4.4.6.1 Piecewise-Linear Pushover-History Analysis and Estimation of Peak Response (Seismic Demand)
IRSA is performed at each pushover step (i), by monotonically imposing MDOF system displacement increments \(\Delta {\mathop{\textbf{u}}\nolimits} _{\textrm{n}}^{{\textrm{(i)}}}\) defined in Eq. (27) simultaneously in all modes considered. In this process, the increment of a generic response quantity of interest, such as the increment of an internal force, a displacement component, a story drift or the plastic rotation of a previously developed plastic hinge etc, is calculated in each mode as
where \(\tilde r_{\textrm{n}}^{{\textrm{(i)}}}\) represents the generic response quantity to be obtained in each mode for \(\Delta \tilde F^{{\textrm{(i)}}} = 1\), i.e., by imposing the displacement vector \(\tilde {\bf u}_{\textrm{n}}^{{\textrm{(i)}}}\) given in Eq. (27). This quantity is then combined by an appropriate modal combination rule, such as Complete Quadratic Combination (CQC) rule to obtain the relevant response increment for \(\Delta \tilde F^{{\textrm{(i)}}} = 1\):
where \(\uprho _{{\textrm{mn}}}^{{\textrm{(i)}}}\) is the cross-correlation coefficient of the CQC rule. Thus, generic response quantity at the end of the (i)’th pushover step can be estimated as
in which \(r^{{\textrm{(i)}}}\) and \(r^{{\textrm{(i}} - {\textrm{1)}}}\) are the generic response quantities to develop at the end of current and previous pushover steps, respectively. In the first pushover step (i = 1), response quantities due to gravity loading are considered as \(r^{{\textrm{(0)}}}\).
Incremental scale factor \(\Delta \tilde F^{{\textrm{(i)}}}\) is the only, single unknown quantity at each pushover step, which is obtained without any iteration from piecewise linearized yield condition of the currently weakest plastic hinge. Once it is calculated, all response quantities of interest are obtained from the generic expression of Eq. (30).
Essentially IRSA is the extension of the single-mode pushover history analysis described earlier. Indeed, instead of running a static analysis under first-mode displacements or adaptive equivalent seismic loads, a multi-mode response spectrum analysis is performed at each step where seismic input data is specified in the form of initial spectral displacement in each mode, \(S_{{\textrm{den}}}^{{\textrm{(1)}}}\), which is calculated in the first pushover step and remains unchanged at all pushover steps.
Peak response, i.e., seismic demand quantities are obtained when cumulative modal displacements, \(d_{\textrm{n}}^{{\textrm{(i)}}}\), which are calculated by Eqs. (15) and (7), simultaneously reach the respective initial elastic spectral displacements \(S_{{\textrm{den}}}^{{\textrm{(1)}}}\), which are assumed equal to the corresponding inelastic displacements according to equal displacement rule. IRSA has been comprehensively tested by Önem (2008).
4.4.6.2 Treatment of P-Delta Effects in IRSA
P-delta effects are rigorously considered in IRSA through straightforward consideration of geometric stiffness matrix in each increment of the response spectrum analysis performed. Along the pushover-history process, accumulated plastic deformations result in negative-definite second-order stiffness matrices, which in turn yield negative eigenvalues and hence negative post yield slopes in the modal capacity diagrams of the lower modes. The corresponding mode shapes are representative of the post-buckling deformation state of the structure, which may significantly affect the distribution of internal forces and inelastic deformations of the structure.
Analysis of inelastic SDOF systems based on bilinear backbone curves with negative post-yield slopes indicate that such systems are susceptible to dynamic instability rather than having amplified displacements due to P-delta effects. Therefore the use of P-delta amplification coefficient (C 3) defined in FEMA 356 document (FEMA, 2000) is no longer recommended (FEMA, 2005; ASCE, 2006). The dynamic instability is known to depend on the yield strength, initial stiffness, negative post-yield stiffness and the hysteretic model of SDOF oscillator as well as on the characteristics of the earthquake ground motion. Accordingly, practical guidelines have been proposed for minimum strength limits in terms of other parameters to avoid instability (Miranda and Akkar, 2003; ASCE, 2006; FEMA, 2005, 2009). For the time being, equal displacement rule is used in IRSA even P-delta effects are present as long as an imminent danger of dynamic instability is not expected according to the above-mentioned practical guidelines.
4.4.7 Individual Multi-Mode Pushover Analysis with Invariant Multi-Mode Load Patterns: Modal Pushover Analysis (MPA)
Modal Pushover Analysis (MPA), which was developed by Chopra and Goel (2002) based on earlier studies by Paret et al. (1996) and Sasaki et al. (1998), ignores the joint contribution of the individual modes to the section forces in the formation of plastic hinges. Nonlinear response is estimated independently for each mode with a single-mode pushover analysis based on an invariant load pattern proportional to initial linear elastic mode shape of a given mode (see Eq. (17)).
Since joint contribution of modes to response quantities during pushover is ignored, modal scaling is not required at all in MPA. Peak modal response quantities are obtained for each mode from the corresponding equivalent SDOF system analysis independently and then combined (exactly as in the linear response spectrum analysis) with an appropriate modal combination rule. It is reported that MPA procedure is able to estimate story drifts with a reasonable accuracy (Chopra and Goel, 2002; Chintanapakdee and Chopra, 2003). However it fails to estimate the locations of plastic hinges as well as the plastic hinge rotations and section forces, the essential demand quantities for the performance assessment in ductile and brittle behavior modes. Such quantities, which are already calculated by MPA, are completely disregarded and recalculated approximately by indirect supplementary analyses (Goel and Chopra, 2004, 2005). Certain refinements have been made on MPA through energy based development of modal capacity diagrams (Hernandeez-Montes et al., 2004; Kalkan and Kunnath, 2006).
5 Concluding Remarks
Rapid urban development all around the world including earthquake prone areas in the last 50 years resulted in higher seismic risk for existing buildings and lifelines. This created a need for improved tools in assessment of existing structures for seismic performance and retrofit design, which in turn prompted the development of performance-based assessment and design concept.
Performance-based assessment and design concept, which is essentially based on deformation-based evaluation approach, has evolved as a reaction to the traditional strength-based design approach. Towards the end of the last century engineers began realizing that seismic evaluation and design of structures should be based on nonlinear deformation demands, not on linear stresses induced by reduced seismic forces that are crudely correlated with an assumed overall ductility capacity of a given type of a structure, the starting point of the strength-based de-sign.
Development of performance-based assessment and design concept supported by deformation-based assessment approach is a totally new era in earthquake engineering, where practicing engineers have become able to quantify the nonlinear deformations as seismic demand quantities under a given seismic action, which are the direct attributes of the seismic damage.
The significant developments took place in the last two decades in practice-oriented nonlinear analysis procedures based on the so-called pushover analysis. It appears that some more time is needed before the use of rigorous nonlinear response history analysis, which is the ultimate tool of performance-based seismic assessment, is accepted by the engineering profession. On the contrary, engineers liked the idea behind and physical appeal of the pushover analysis. Yet they have a serious barrier in their front: By education and professional inheritance they are all “linear engineers”. A new transformation is needed in university education and professional training to incorporate the nonlinear behavior of materials and systems into the curricula. Another barrier is the attempts by some linear-minded method developers and code writers to replace the nonlinear response with a fictitious “equivalent linear” response concept.
It can be argued that single-mode pushover based on predominant mode response may be considered to reach a maturity and engineers (although currently in small numbers) enjoy using this new and exciting tool for the performance assessment of existing structures. However, regarding the progress in pushover analysis, the challenge is in the development of rational and practical multi-mode pushover procedures. Although a great deal of effort has been spent during the last decade by many researchers to develop new and reliable procedures, the outcome is not satisfactory. The majority of the newly developed procedures have confined themselves merely with plotting the single multi-mode pushover curve, as if it were the ultimate goal of such an analysis. This tendency limits the role of pushover analysis of being no more than a “capacity estimation tool”. Yet some researchers could not stop themselves to try the illogical: To convert the single multi-mode pushover curve to an equivalent SDOF system (basically of the dominant mode) in an attempt to estimate the seismic demand.
The number of multi-mode pushover procedures that are able to estimate the seismic demand under a given earthquake is very limited and their accuracy has not been fully tested. More research and practical application studies are still needed towards achieving the ultimate goal: Performing seismic assessment of existing structures as well as the design of new structures with improved performance-based analysis procedures.
References
Antoniou S, Rovithakis A, Pinho R (2002) Development and verification of a fully adaptive pushover procedure. Paper No. 822. In: Proceedings of the 12th European conference on earthquake engineering, London
Antoniou S, Pinho R (2004a) Advantages and limitations of adaptive and non-adaptive force-based pushover procedures. J Earthquake Eng 8:497–552
Antoniou S, Pinho R (2004b) Development and verification of a displacement-based adaptive pushover procedure. J Earthquake Eng 8:643–661
ASCE – American Society of Civil Engineers (2007) Seismic rehabilitation of existing buildings (ASCE 41-6), 1st edn, Washington, DC
ATC – Applied Technology Council (1978) Tentative provisions for the development of seismic regulations for buildings (ATC – 03), Redwood City, CA
ATC – Applied Technology Council (1996) Seismic evaluation and retrofit of concrete buildings (ATC – 40), Redwood City, CA
Aydınoğlu MN (2003) An incremental response spectrum analysis based on inelastic spectral displacements for multi-mode seismic performance evaluation. Bull Earthquake Eng 1:3–36
Aydınoğlu MN (2004) An improved pushover procedure for engineering practice: Incremental Response Spectrum Analysis (IRSA). International workshop on “performance-based seismic design: concepts and implementation”, Bled, Slovenia, PEER Report 2004/05 pp 345–356
Aydınoğlu MN (2005) A code approach for deformation-based seismic performance assessment of reinforced concrete buildings. International workshop on “seismic performance assessment and rehabilitation of existing buildings”, Joint Research Centre (JRC), ELSA Laboratory, Ispra, Italy
Aydınoğlu MN (2007) A response spectrum-based nonlinear assessment tool for practice: incremental response spectrum analysis (IRSA), Special issue: response spectra (Guest Editor: Trifunac MD). ISET J Earthquake Technol 44(1):481
BCJ (2009) Building center of Japan: the building standard law of Japan, Tokyo
CEN (2004) European committee for standardization: Eurocode 8: design of structures for earthquake resistance, Part 1: general rules, seismic actions and rules for buildings. European Standard EN 1998-1, Brussels
CEN (2005) European committee for standardization: Eurocode 8: design of structures for earthquake resistance, Part 3: assessment and retrofitting of buildings. European Standard EN 1998-3, Brussels
Chintanapakdee C, Chopra AK (2003) Evaluation of the modal pushover analysis procedure using vertically regular and irregular generic frames. Report No. EERC-2003/03, Earthquake Engineering Research Center, University of California, Berkeley, CA
Chopra AK (2001) Dynamics of structures, 2nd edn. Prentice Hall, Englewood Cliffs, NJ
Chopra AK, Goel RK (2002) A modal pushover analysis for estimating seismic demands for buildings. Earthquake Eng Struct Dyn 31:561–582
CSI (2006) Computers and Structures Inc.: perform – components and elements for perform-3D and perform-collapse, Version 4, Berkeley, CA
Elnashai AS (2002) Do we really need inelastic dynamic analysis? J Earthquake Eng 6:123–130
Fajfar P, Fischinger M (1988) N-2 A method for nonlinear seismic analysis of regular structures. In: Proceedings of the 9th world conference on earthquake engineering, Tokyo
FEMA – Federal Emergency Management Agency (1997) NEHRP guidelines for the seismic rehabilitation of buildings (FEMA 273). Washington, DC
FEMA – Federal Emergency Management Agency (1997) NEHRP Commentary on the guidelines for the seismic rehabilitation of buildings (FEMA 274). Washington, DC
FEMA – Federal Emergency Management Agency (2000) Prestandard and commentary for the seismic rehabilitation of buildings (FEMA 356). Washington, DC
FEMA – Federal Emergency Management Agency (2005) Improvement of nonlinear static seismic analysis procedures (FEMA 440). Washington, DC
FEMA – Federal Emergency Management Agency (2009) Effects of strength and stiffness degradation on seismic response (FEMA 440A). Washington, DC
Filippou FC, Fenves GL (2004) Methods of analysis for earthquake-resistant design. In: Bozorgnia Y, Bertero VV (eds) Earthquake engineering – from engineering seismology to performance-based engineering. CRC Press, Boca Raton, FL
Freeman SA, Nicoletti JP, Tyrell JV (1975) Evaluations of existing buildings for seismic risk – a case study of puget sound naval shipyard, Bremerton, WA. In: Proceedings of the 1st U.S. national conference on earthquake engineering, EERI, Berkeley, pp 113–122
Goel RK, Chopra AK (2004) Evaluation of modal and FEMA pushover analyses: SAC buildings. Earthquake Spectra 20:225–254
Goel RK, Chopra AK (2005) Extension of modal pushover analysis to compute member forces. Earthquake Spectra 21:125–139
Gupta B, Kunnath SK (2000) Adaptive spectra-based pushover procedure for seismic evaluation of structures. Earthquake Spectra 16:367–391
Hernandeez-Montes E, Kwon OS, Aschheim MA (2004) An energy based formulation for first and multiple-mode nonlinear (pushover) analyses. J Earthquake Eng 8:69–88
Ibarra LF, Krawinkler H (2005) Global collapse of frame structures under seismic excitations. PEER Report 2005/06, Berkeley, CA
ICBO – International Conference of Building Officials (1988) Uniform building code, Whittier, CA
Kalkan E, Kunnath SK (2004) Method of modal combinations for pushover analysis of buildings. Paper No. 2713. In: Proceedings of the 13th world conference on earthquake engineering, Vancouver, BC
Kalkan E, Kunnath SK (2006) Adaptive modal combination procedure for nonlinear static analysis of building structures. J Struct Eng ASCE 132:1721–1731
Jirasek M, Bazant ZP (2001) Inelastic analysis of structures. Wiley, Ne York, NY
Menegotto M, Pinto PE (1973) Method of analysis for cyclically loaded R.C. plane frames including change in geometry and non-elements behavior of elements under combined normal force and bending. In: Proceedings of the IABSE symposium, vol 13, Lisbon, Portugal, pp 15–22
Miranda E, Akkar SD (2003) Dynamic instability of simple structural systems. J Struct Eng 129:1722–1726
MPWS – Ministry of Public Works and Settlement (Turkish Government) (2007) Specification for buildings to be built in earthquake zones (in Turkish), Ankara
Orakcal K, Wallace JW (2004) Modeling of slender reinforced concrete walls. In: Proceedings of the 13th world conference on earthquake engineering, Vancouver, BC
Önem G (2008) Evaluation of practice-oriented nonlinear analysis methods for seismic performance assessment. Ph.D. Thesis, Boğaziçi University Kandilli Observatory and Earthquake Research Institute, Istanbul
Paret TF, Sasaki KK, Eilbeck DH, Freeman SA (1996) Approximate inelastic procedures to identify failure mechanisms from higher mode effects. Paper No. 966. In: Proceedings of the 11th world conference on earthquake engineering, Acapulco, Mexico
Paulay T, Priestley MJN (1992) Seismic design of reinforced concrete and masonry buildings. Wiley, New York, NY
Priestley MJN, Valvi GM, Kowalsky MJ (2007) Displacement-based seismic design of structures. IUSS Press, Pavia
Sasaki KK, Freeman SA, Paret TF (1998) Multimode pushover procedure (MMP) – a method to identify the effects of higher modes in a pushover analysis. In: Proceedings of the 6th U.S. national conference on earthquake engineering, Seattle, WA
SEAOC – Structural Engineers Association of California (1995) Vision 2000: performance based seismic engineering of buildings. San Francisco, CA
Spacone E, Filippou FC, Taucer FF (1996) Fibre bean-column model for nonlinear analysis of R/C frames. Earthquake Eng Struct Dyn 25:711–725
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2010 Springer Science+Business Media B.V.
About this chapter
Cite this chapter
Aydınoğlu, M.N., Önem, G. (2010). Evaluation of Analysis Procedures for Seismic Assessment and Retrofit Design. In: Garevski, M., Ansal, A. (eds) Earthquake Engineering in Europe. Geotechnical, Geological, and Earthquake Engineering, vol 17. Springer, Dordrecht. https://doi.org/10.1007/978-90-481-9544-2_8
Download citation
DOI: https://doi.org/10.1007/978-90-481-9544-2_8
Published:
Publisher Name: Springer, Dordrecht
Print ISBN: 978-90-481-9543-5
Online ISBN: 978-90-481-9544-2
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)