
Abstract
The Global Positioning System (GPS) transmits signals in two frequencies. It allows the correction of the first order ionospheric effect by using the ionosphere free combination. However, the second and third order ionospheric effects, which combined may cause errors of the order of centimeters in the GPS measurements, still remain. In this paper the second and third order ionospheric effects, which were taken into account in the GPS data processing in the Brazilian region, were investigated. The corrected and not corrected GPS data from these effects were processed in the relative and precise point positioning (PPP) approaches, respectively, using Bernese V5.0 software and the PPP software (GPSPPP) from NRCAN (Natural Resources Canada). The second and third order corrections were applied in the GPS data using an in-house software that is capable of reading a RINEX file and applying the corrections to the GPS observables, creating a corrected RINEX file. For the relative processing case, a Brazilian network with long baselines was processed in a daily solution considering a period of approximately one year. For the PPP case, the processing was accomplished using data collected by the IGS FORT station considering the period from 2001 to 2006 and a seasonal analysis was carried out, showing a semi-annual and an annual variation in the vertical component. In addition, a geographical variation analysis in the PPP for the Brazilian region has confirmed that the equatorial regions are more affected by the second and third order ionospheric effects than other regions.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Global Position System
- Global Navigation Satellite System
- Global Navigation Satellite System
- Precise Point Position
- Global Position System Data
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Global Navigation Satellite Systems (GNSS), especially the GPS, represent one of the most advanced technologies which are currently available for geodetic positioning. GPS has been widely used both for geodetic positioning and scientific research work that are demanding more and more precise coordinate determination. After the deactivation of SA (Selective Availability), the ionospheric effect is one of the main factors that cause limitations to the accuracy of positioning with single frequency receivers, also causing difficulties to resolve the carrier phase integer ambiguities.
When GPS receivers capable of collecting double frequency data are available, it is possible to obtain the ionosphere free linear combination from L1 and L2 signals in order to correct for first order ionospheric effects. However, the second (2nd) and third (3rd) order ionospheric effects (also called higher order ionospheric effects), which may cause errors of the order of centimeters in the GPS measurements, still remain. In recent years the international scientific community has driven more attention to this kind of effects and some works have shown that for high accuracy GNSS positioning these effects have to be taken into consideration (Hernández-Pajares et al. 2007).
In this paper the 2nd and 3rd order ionospheric effects, which were taken into account in the GPS data processing in the Brazilian region, were investigated. The GPS observables were corrected from these effects using an in-house software called “RINEX_HO” (see Sect. 76.3). The mathematical models used to compute these effects will be presented, as well as the transformations involving the Earth magnetic field and the use of TEC from Global Ionospheric Maps or calculated from GPS pseudorange measurements.
The corrected and not corrected GPS data were processed in the relative and PPP approaches, respectively, using Bernese V5.0 software and PPP software (GPSPPP) from NRCAN. The main goal of the exercise was to analyze the impact of accounting for higher order effects in the modeling of the ionosphere when processing GNSS data in the Brazilian region. For the relative positioning case, a Brazilian network with long baselines was processed in a daily solution considering a period involving the year 2006. For the PPP case, the analysis was accomplished using data collected in the IGS FORT station, considering the period from 2001 to 2006. A seasonal analysis was also carried out. In addition, a geographical variation analysis using PPP results for the Brazilian region was undertaken.
2 Second and Third Order Ionospheric Effects
The development of the equations to compute the 2nd and 3rd ionospheric effects can be found in Bassiri and Hajj (1993), Odijk (2002), Hernández-Pajares et al. (2007), among other authors. The phase (\( {{\phi}_{\rm{Li}}} \)) and pseudorange (\( {\hbox{P}}{{\hbox{R}}_{\rm{Li}}} \)) observations equations in the band Li (i = 1, 2) can be written as:
where, \( {{\rho^\prime}} \) is the geometric distance between the satellite and receiver added by non-dispersive effects such as troposphere and clocks. The components \( {\hbox{I}}_{\rm{g}}^{{(1)}} \), \( {\hbox{I}}_{\rm{g}}^{{(2)}} \) and \( {\hbox{I}}_{\rm{g}}^{{(3)}} \) denote, respectively, the first, second and third order ionospheric effects of the group. The phase ambiguity is represented by NLi and the components \( {{{\upsilon }}_{\rm{\phi}_{\rm{Li}}}} \) and \( {{{\upsilon }}_{{{\rm{P}}_{\rm{Li}}}}} \)are, respectively, unmodeled phase and pseudorange effects. From (76.1) it is noticeable that the ionospheric effects are similar for phase and group, differing only by the sign and the factors 2 and 3, respectively, for the 2nd and 3rd order ionospheric effects. The 2nd and 3rd order ionospheric effects for the group in the frequency fLi (i = 1, 2) can be computed by (Bassiri and Hajj 1993; Odijk 2002):
where,
\( {\hbox{A}} \cong 80.6\;{{\hbox{m}}^3}{/}{{\hbox{s}}^2} \); e = 1.60218.10−19 C for the electron charge; me = 9.10939.10−31 kg for the electron mass; \( \left\| {\hbox{B}} \right\| \) denotes the magnitude of the geomagnetic induction vector B and \( {{\theta }} \) the angle between the wave propagation direction and the geomagnetic field vector. The product \( \left\| {\hbox{B}} \right\|{{ \times }}\left| {{{\cos\theta }}} \right| \) has to be evaluated for the computation of the 2nd order effect what can be done based on the inner product of the vector B (geomagnetic induction) and the unit vector J (propagation direction of the signal) at the height of the single ionospheric layer (Fig. 76.1):

Geomagnetic induction vector B. Adapted from Odijk (2002)
The inner product \( {{\hbox{B}}^{\rm{t}}} \cdot {\hbox{J}} \) is more easily obtained in a geomagnetic reference system, where it is possible to use a dipolar geomagnetic system or a more realistic geomagnetic field, such as that of the International Geomagnetic Reference Model (IGRM). In general, the approximation by dipolar model has an accuracy of approximately 75% (Bassiri and Hajj 1993). Then, the geodetic receiver coordinates must be transformed to geomagnetic coordinates and, after that, transformed to the geomagnetic local system (Em, Nm, Um), as exemplified in Fig. 76.2.

Geomagnetic local reference system. Adapted from Odijk (2002)
Then, the inner product \( {{\hbox{B}}^{\rm{t}}} \cdot {\hbox{J}} \) can be computed as a function of the receiver and satellite positions (Odijk 2002; Kedar et al. 2003):
where, am and zm denote, respectively, the geomagnetic azimuth and zenithal angle of the satellite in the local geomagnetic system (Fig. 76.2), \( {\phi}_{\rm{m}}^{\prime} \) is the geomagnetic latitude of the pierce point, \( {{\hbox{R}}_{\rm{e}}} \) is Earth equatorial radius, hion is the height of the ionospheric layer, and Beq is the amplitude of the equatorial magnetic field at the Earth’s surface (~3.12 × 105 T).
The 3rd order ionospheric effect can be computed by (Odijk 2002):
The 3rd order ionospheric effect is very similar to the 2nd order effect once it is given as a function of the TEC. However, it is a function of the maximum electron density \( {{\hbox{N}}_{{\rm{e,max}}}} \) and the factor \( \eta \), which can be approximated by a constant value of 0.66 (Odijk 2002). An expression to compute \( {{\hbox{N}}_{{\rm{e,max}}}} \) as a function of the TEC is given based on studies made by Brunner and Gu (1991):
2.1 TEC from Pseudorange
The Total Electron Content in the satellite-receiver path can be computed using pseudorange (PRLi) measurements:
where, \( {\rm f_{Li}} \) (i = 1, 2) is the GPS frequency, \( {\hbox{DC}}{{\hbox{B}}_{\rm{r}}} \) and \( {\hbox{DC}}{{\hbox{B}}^{_{\rm{s}}}} \) (in units of seconds) are the Differential Code Bias, hardware delays between the two frequencies, respectively, in the receiver and satellite. The speed of light in vacuum is represented by c and \( {\varepsilon_{\rm{L1L2}}} \) represents all remaining unmodeled effects. Considering that the standard deviations of the pseudoranges (\( {\sigma_{{\rm{P}}{{\rm{R}}_{\rm{L1}}}}} \) and \( {\sigma_{{\rm{P}}{{\rm{r}}_{\rm{L2}}}}} \), respectively, for PRL1 and PRL2) and of the DCBs (\( {\sigma_{{\rm{DC}}{{\rm{B}}_{\rm{r}}}}} \) and \( {\sigma_{{\rm{DC}}{{\rm{B}}^{\rm{s}}}}} \), respectively for receiver and satellite) are known (in units of meters), it is possible to estimate the TEC variance, by the covariance propagation law, from (76.7):
The TEC can also be computed based on the pseudorange smoothed by the phase or from Global Ionosphere Maps (GIMs). The GIMs are available at CODE (Center for Orbit Determination for Europe)’s home page, along with complementary information such as the daily and monthly DCBs.
2.2 The Earth Magnetic Field
The internal magnetic field can be approximated by an earth centered dipole in ionosphere heights. The dipole axis crosses the Earth’s surface in two points (north and south poles) which change with time because of the secular variations of the Earth magnetic field. The geomagnetic south pole is located approximately at the geographic latitude 79°S and longitude 110°E, while the geomagnetic north pole at approximately 79°N and 70°W (Davies 1990). The relation between the dipolar coordinates and the corresponding geographic coordinates can be found in Davies (1990) and a way to update the pole coordinates in function of MJD (Modified Julian Date) can be found in Hapgood (1992).
The Earth’s magnetic field can be represented more accurately when the Earth’s scalar potential is expanded in spherical harmonics, which involves an adjustment of the coefficients in certain intervals of time because of the intrinsic changes of the magnetic field. The responsibility of this task is of International Geomagnetic Reference Field (IGRF). The IGRF model consists of a set of global spherical harmonics coefficients that are available for users on the internet in addition to the corresponding subroutines to perform the transformations between geographic and geomagnetic systems, as for example in the package GEOPACK (Tsyganenko 2005). In this paper the Corrected Geomagnetic Model (CGM) was used, whose Fortran subroutines are available at the PIM (Parameterized Ionospheric Model) home page (PIM 2001). The CGM presents a grid with corrected geomagnetic latitudes and longitudes that were created based on a more realistic magnetic field, i.e. the DGRF and IGRF (Gustafsson et al. 1992).
3 Results
The GPS data processing was accomplished based, in turn, on data that was corrected and not corrected from 2nd and 3rd order ionospheric effects. Results were then compared, in order to analyze the impact of accounting or not for the higher order ionospheric effects.
The corrections were applied based on the in-house C++ software called RINEX_HO. This software reads a RINEX file and applies the corrections to the GPS observations, creating a corrected RINEX file. The TEC can be interpolated from GIM (Global Ionospheric Maps) or computed from pseudorange measurements. The transformation involving terrestrial and geomagnetic systems is performed with the subroutines that apply the Corrected Geomagnetic Model (PIM 2001).
3.1 TEC Analysis
Using the DCBs data available at CODE, their standard deviation (SD) was computed considering the data of the year 2002. The IGS FORT station was chosen and the computed precision for DCBr (P1-P2) was 2.07 TECU. Then choosing a typical satellite (PRN 31) and applying the same procedure the computed precision for DCBs (P1-P2) was 0.4 TECU. These computed precisions from CODE data were inserted in (76.8) to compute the precision of our calculated TEC. In this case the values adopted for the precisions of P1 and P2 observables were, respectively, 0.60 and 0.80 m. The result from the covariance propagation with (76.8) gives the value of 10.05 TECU. The computed precision of the TEC was used for the covariance propagation into the second order ionospheric effect. The covariance propagation equation was developed from (76.2), where the projection of the geomagnetic induction vector onto the propagation path was considered as constant. Figure 76.3 shows the computed precision of the 2nd order ionospheric effects (L1 and L2) for PRN 31 as a function of the computed TEC precision (10.05 TECU).

Precision of the 2nd order effect (SD of TEC 10.05 TECU)
From Fig. 76.3, it is possible to see that for low satellite elevation angles the precision reaches values near 1 mm for L1, showing that the TEC with an uncertainty of the order of 10 TECU can be used to calculate the 2nd order ionospheric effects. These results show that it is possible to use the TEC either from GIM or from pseudorange, once the precision of the TEC in both cases is near 10 TECU (Ciraolo et al. (2007)).
3.2 Dipolar Versus CGM
The geomagnetic latitudes were calculated using the dipolar and the Corrected Geomagnetic Model. The differences can be seen in Fig. 76.4.

Geomagnetic latitude differences (degrees)
The difference in geomagnetic latitude between dipolar and CGM reached up to 18° for Equatorial regions. The second order ionospheric effects (L1) for some IGS stations on the day 48 of 2007 were computed using the CGM and dipolar models, respectively. The differences for each IGS stations (Fig. 76.5) were then calculated using the max values (in mm) during the day.

Second order ionospheric differences (dipolar versus CGM)
The differences are from −4 up to 4 mm, which corresponds to about 50% of the total effect considering the CGM.
3.3 Relative Network Processing
The relative GPS data processing was accomplished using data from a Brazilian network (Fig. 76.6) with the Bernese software in a free adjustment and a posteriori normal equations solution. The results were generated with data corrected and not corrected in a daily solution for the year 2006.

Brazilian station used in the relative processing
The daily vertical discrepancies (DU) due to accounting and not accounting for the higher order ionopsheric effects, in a local geodetic system for the BRAZ station, are shown in the Fig. 76.7.

Vertical daily differences (station BRAZ)
Figure 76.7 shows that the vertical discrepancies can reach the order of up to 4 mm. However, there are some discontinuities in the time series which must be analyzed for future works. The mean discrepancies in the vertical component for all stations considering the entire period (year 2006) can be seen in Fig. 76.8.

Mean difference in the vertical component (year 2006) for all station (relative processing)
The largest difference was for the CUIB station as can be seen in the Fig. 76.7, reaching the order of 3 mm. For the remaining stations the mean discrepancies were of the order of 1–2 mm.
3.4 Precise Point Positioning
The PPP was accomplished using the software GPSPPP from NRCAN. Dual frequency GPS data were used to form the ionosphere free combination and the following corrections were applied: Zenital Tropospheric Delay estimated as a random walk process; Earth body tide; Ocean Tide Loading, Absolute Phase Center Variations, Phase Windup, among others (NRCAN 2004). The coordinates are presented in terms of daily solutions. It is important to mention that the data was processed using precise ephemeris and satellite clock corrections from IGS which are not corrected from higher order ionospheric effects. The influence of the higher order ionospheric effects on PPP was analyzed geographically (Fig. 76.9) considering the day 80 of 2003, when kp (the planetary geomagnetic index) reached a maximum of 5, indicating a moderate to active ionosphere (Davies 1990).

Second- and third-order effect in PPP (geographical variation – mm)
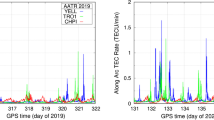
The discrepancies due to accounting for 2nd and 3rd order ionospheric effects in the PPP reach up to 8 mm near the Equatorial region, as can be seen in Fig. 76.9. A time series of these discrepancies, is shown in Fig. 76.10. The values are in millimeters. In this case GPS data from station FORT (latitude: −3.52°; longitude: −38.25°) was used, considering the years 2001–2006. A seasonal variation of the vertical component (DU) is shown in Fig. 76.11, which is based on a decomposition time series using the statistical software Minitab (Minitab 2009).

Time series of PPP errors caused by higher order ionospheric effects

Time series decomposition for DU
From the detrended data (Fig. 76.11) an annual and semi-annual variation caused by the 2nd and 3rd order ionospheric effects on PPP can be observed. Considering all years involved in the processing the vertical discrepancies (Fig. 76.10) reached up an average of approximately 4 mm with standard deviation of 2 mm. Concerning to the years 2001 and 2002 (maximum of the solar cycle) the vertical discrepancies reached up the order of 12 mm. These results indicate that for high accuracy GNSS PPP these effects must be taken into consideration.
4 Conclusions
In this paper the second and third order ionospheric effects, which were taken into account in the GPS data processing in the Brazilian region, were investigated. The GPS observables were corrected from these effects using an in-house software called “RINEX_HO”. The corrected and not corrected data was processed in the relative and PPP approaches. The main goal was to analyze the impact of accounting for higher order ionospheric effects in GNSS data processing for the Brazilian region.
The discrepancies in the PPP due to the consideration of the 2nd and 3rd order ionospheric effects in the data processing reached up to the order of centimeters during an active ionosphere period (maximum of the solar cycle) and the PPP time series has shown annual and semi-annual variations. The relative network processing, using or not using higher order ionospheric corrections, has presented variations of the order of −4 up to 4 mm in the stations coordinates. This confirms that for high precision GNSS positioning, either relative or absolute, the 2nd and 3rd order ionospheric effects must be taken into account.
References
Bassiri S, Hajj GA (1993) Higher-order ionospheric effects on the global positioning systems observables and means of modeling them. Manuscr Geod 18:280–289
Brunner F, Gu M (1991) Manuscr Geod 16:205–214
Ciraolo L, Azpilicueta F, Brunini C, Meza A, Radicella SM (2007) J Geod 81(2):111–120
Davies K (1990) Ionospheric radio. Peter Peregrinus Ltd., London, 580 pp
Gustafsson G, Papitashvili NE, Papitashvili VO (1992) A revised corrected geomagnetic system for epochs 1985 and 1990. J Atm Terr Phy 54(11/12):1609–1631
Hapgood MA (1992) Space physics coordinate transformations: a user guide. Planet Space Sci 40(5):711
Hernández-Pajares M, Juan JM, Sanz J (2007) Second-order ionospheric term in GPS: implementation and impact on geodetic estimates. J Geophys Res 112:B08417
Kedar S, Hajj A, Wilson BD, Heflin MB (2003) Geophys Res Lett 30(16):1829
Minitab. Minitab Quality Companion (2009) MINITAB – statistical software. http://www.minitab.com. Acessed in March of 2009
NRCAN (2004) On-line precise point positioning: ‘how to use’ document, 2004. http://www.geod.nrcan.gc.ca/userguide/index_e.php. Acessed in March of 2009.
Odijk D (2002) Fast precise GPS positioning in the presence of ionospheric delays, 242 pp. PhD dissertation, Faculty of Civil Engineering and Geosciences, Delft University of Technology, Delft
PIM (2001) Parametrized ionospheric model: user guide, 2001. http://www.cpi.com. Acessed in March of 2009.
Tsyganenko N (2005) Geopack: a set of fortran subroutines for computations of the geomagnetic field in the Earth’s magnetosphere. Universities Space Research Association, Washington, DC
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2012 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Marques, H.A., Monico, J.F.G., Rosa, G.P.S., Chuerubim, M.L., Aquino, M. (2012). Second and Third Order Ionospheric Effects on GNSS Positioning: A Case Study in Brazil. In: Kenyon, S., Pacino, M., Marti, U. (eds) Geodesy for Planet Earth. International Association of Geodesy Symposia, vol 136. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-20338-1_76
Download citation
DOI: https://doi.org/10.1007/978-3-642-20338-1_76
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-20337-4
Online ISBN: 978-3-642-20338-1
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)