
Abstract
Satellite altimetry works conceptually by the satellite transmitting a short pulse of microwave radiation with known power towards the sea surface, where it interacts with the sea surface and part of the signal is returned to the altimeter where the travel time is measured accurately. The determination of sea surface height from the altimeter range measurement involves a number of corrections: those expressing the behavior of the radar pulse through the atmosphere, and those correcting for sea state and other geophysical signals. A number of these corrections need special attention close to the coast and in shallow water regions.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others
Keywords
5.1 Introduction
Satellite altimetry works conceptually by the satellite transmitting a short pulse of microwave radiation with known power towards the sea surface, where it interacts with the sea surface and part of the signal is returned to the altimeter where the travel time is measured accurately. The determination of sea surface height from the altimeter range measurement involves a number of corrections: those expressing the behavior of the radar pulse through the atmosphere, and those correcting for sea state and other geophysical signals. A number of these corrections need special attention close to the coast and in shallow water regions.
Global description of sea level and its variation with time to high accuracy is the ultimate derivative from a satellite altimeter’s range measurement. However, the accuracy with which this can be made is directly linked with the accuracy of the corrections applied to derive the sea surface height.
The corrections fall into two groups. Range corrections deal with the modifications of the radar speed and actual scattering surface of the radar pulse. Geophysical corrections adjust observed sea surface height for the largest time-variable contribution like ocean tide and atmospheric pressure in order to isolate the ocean dynamic height contributors to sea surface height variations.
If the atmosphere were a perfect vacuum, and the wave distribution of the ocean had a well-known distribution, then the range between the altimeter and the sea surface would have been easily determined from the two-way travel time and the speed of the emitted radar pulse. However, the presence of dry gasses, water vapor, and free electrons in the atmosphere reduces the speed of the radar pulse causing the observed range to become longer and the sea surface height to be too low, if this is not accounted for.
The corrections established to model and adjust for the refraction and delay of the radar signal in the atmosphere are correspondingly split into three components. The dry tropospheric correction accounts for dry gasses (mainly oxygen and nitrogen), the wet tropospheric correction accounts for the water vapor, and the ionospheric correction accounts for the presence of free electrons in the upper atmosphere.
Both the wave distribution and the scattering of the radar signal by the sea surface are non-Gaussian: not only are wave troughs more prevalent, but they also reflect more of the radar signal back to the satellite than the crests, causing the sea level detection to be biased low. This bias is related to the local sea state (wind and wave conditions) and is therefore called the sea-state bias. The sea-state bias correction attempts to account for the difference between the actual scattering surface and the actual mean sea surface within the altimeter footprint which is the parameter sought for sea surface height studies. The correction is a combined effect of electromagnetic, skewness, and tracker biases.
Following the schematic illustration in Fig. 5.1 and using similar notation to Fu and Cazenave (2001) the corrected range R corrected is related to the observed range R obs as
where R obs = c t/2 is the computed range from the travel time t observed by the onboard ultra-stable oscillator (USO), and c is the speed of the radar pulse neglecting refraction.

A schematic illustration of the principle of satellite altimetry and the corrections applied to the altimeter observations of sea surface height. The range corrections affect the range through the speed of the radar pulse and sea-state bias. The geophysical corrections removed the largest known contributor to sea level in order to enhance the oceanographic contributor. (Figure modified from AVISO)
The height, h, of the sea surface above the reference ellipsoid is given as
where H is the height of the spacecraft determined through orbit determination. Consequently, the sea surface height accuracy is directly related to the accuracy of the orbit determination. Fortunately, the orbit accuracy has improved from tens of meters on the first altimeters to about 1 cm on the most recent satellites (e.g., Bertiger et al. 2008).
All values must be given in a fixed coordinate system based on a mathematical determinable ellipsoid model of the Earth. Most altimetric products are consistently processed in the International Terrestrial Reference Frame (ITRF) (McCarthy 1996). Furthermore, one should be aware of which tide system (mean tide, zero tide, or tide free) applies to the reference ellipsoid, in order to use this consistently in comparison with other sea surface height data like buoy or gauge data referenced using GPS data, as GPS data are normally processed in a tide-free system.
After the (satellite-specific) range corrections have been applied, the resulting sea surface heights vary spatially between ±100 m with temporal variations up to ±10 m.
The primary focus of satellite altimetry is the study of dynamic sea surface height signals related to oceanographic processes, which are normally on the submeter scale. In order to study/isolate these, it is necessary to remove the dominant geophysical contributors to sea surface height variations, which are:
-
h geoid the geoid correction. This gives – by far – the largest contribution to the measured sea surface height. The geoid correction arises from the fact that, in absence of all forces other than gravity and centrifugal forces, the sea surface would coincide with the equipotential surface called the geoid. This correction has negligible temporal variation and acts like a change in the reference system on the observations and the heights are subsequently given relative to the geoid rather than relative to the reference ellipsoid. By removing the permanent geoid signal and referencing the sea surface height to a given geoid model the sea surface height is reduced to meter scale. Geostrophic ocean currents are subsequently computed from this quantity.
-
h tides the tide correction, which is the dominant contributor to temporal sea surface height variations. Ocean tides are the largest tidal component, but the correction also accounts for solid earth tides, loading tides, and pole tides. Tidal signals have the advantage that they can be modeled and described relatively accurately in the deep ocean from a combination of the astronomical forces of the Sun and Moon and hydrodynamic time-stepping models. In coastal regions the situation is considerably more complicated.
-
h atm the dynamic atmosphere correction, which corrects the sea surface height variations due to the time varying atmospheric pressure loading. The atmosphere exerts a downward force on the sea surface and lowers the sea surface when the pressure is high and vice versa. This correction normally involves a static response (inverse barometer) of the ocean to atmospheric forcing for low-frequency signals (longer than 20 days) combined with a correction for dynamic high-frequency variations (shorter than 20 days) in sea surface height that are aliased into the altimetric measurements because of the subsampling by the altimeter.
The actual sea surface height is a superposition of these geophysical signals and the dynamic sea surface height, h D, such that
or
which means that these geophysical corrections should be subtracted from the sea surface height observations. Note that these are corrections for genuine geophysical signals, but they act like corrections to the range.
The next step is to combine the range and geophysical corrections into a combined set of corrections. To avoid confusion, which generally arises as the range corrections have to be applied to the range and that the geophysical corrections have to be applied to the sea surface height, the space agencies have decided to define that all corrections are to be subtracted from the observed sea surface height. The range and sea-state bias corrections have the effect of making the range estimation shorter, which corresponds to raising the sea surface height. By convention, this is implemented as a negative “height” correction that is removed from the sea surface height.
Combining the range and geophysical corrections using this convention, the dynamic sea surface height, h D, is derived from the height, H, of the spacecraft, and the range, R obs as:
where all corrections are sea surface height corrections and, i.e., ΔR dry = – Δh dry, etc.
A summary of all range corrections and corrections for geophysical signals is shown in Table 5.1 with typical values for mean and standard deviation of the various corrections.
For each of the range and geophysical corrections several models are available, and standards to be applied by the space agencies are regularly decided and updated by the international scientific community. These standards are generally decided by the OSTST (Ocean Surface Topography Science Team) for the TOPEX and Jason missions and by the QWG (Quality Working Group) for the ERS and Envisat missions.
One of the keys to the great success of satellite altimetry and the constant improvement of the quality of sea surface height observations from satellite altimetry lies in the constant improvement of orbit determination and analysis and improvement of the corrections applied to the sea surface height observations by the science community. With current state of the art altimeters the accuracy of each 1-s sea surface height observations is currently at the 2–3 cm level in the open ocean, whereas this value is somewhat higher towards the coast (e.g., Strub 2008).
Altimeter data are distributed through agencies like, EUMETSAT, AVISO, PO.DAAC, and NOAA. In addition to these two operational data centers, RADS (Radar Altimeter Database System) is a joint effort by the Delft University of Technology Department for Earth Observation and Space Systems (DEOS) and the NOAA Laboratory for Satellite Altimetry in establishing a harmonized, validated, and cross-calibrated sea level database from all altimetric missions. RADS users have access to the most recent range and geophysical corrections and create their own altimetric products for their particular purpose.
5.2 Sea Level Anomalies
By applying the geophysical corrections, and particularly the geoid correction, the sea surface height, h D, is referring to the chosen geoid model and the range of sea surface height values are typically reduced from ranging up to 100 m to range up to a few meters.
The local sea level height observations with the geoid removed will seldom have zero temporal mean because the dynamic sea surface height, h D, has both a permanent and a time-variable component. The permanent component reflects, among others, the steric expansion of seawater as well as the ocean circulation that is very nearly in geostrophic balance. The temporal average of the dynamic topography is called the mean dynamic topography.
For studies of sea surface height variations it is often more convenient to refer the sea surface height to the mean sea surface height rather than to the geoid, thus creating the sea level anomalies h sla, determined as
Subtraction of the mean sea surface conveniently removes the temporal mean of the dynamic sea surface height and creates sea level anomalies that, in principle, have zero mean. This is so, because mean sea surfaces are normally computed from averaging altimetric observations over a long time period and preferably combining data from several exact repeat missions. Examples are the DNSC08 MSS computed from an average of 12 years of satellite altimetry and the CLS01 MSS computed from an average of 7 years of satellite altimetry. The DNSC08MSS is shown in Fig. 5.2. When removing the temporal mean, also the temporal mean of the corrections are removed (noticing the large mean of the dry troposphere correction) and only the time-variable part of the correction is then a concern.

The DNSC08MSS mean sea surface model. The figure has been significantly smoothed in order to illustrate the main global mean sea surface height features. Units are meters
5.3 Altimetric Sea Level Corrections
In the following sections each correction is introduced with focus on coastal regions. Readers who are interested into a thoroughly physical description of each correction should consult Fu and Cazenave (2001). For each correction, an investigation of the accuracy will be given, by evaluating two state of the art corrections available for Jason-1 satellite altimetry with focus on coastal regions. Table 5.2 shows the two most recent state of the art corrections selected by the OSTST and these are the corrections that have been used for this investigation.
Each satellite will have a number of features that make it unique, and which require special considerations with respect to the range and geophysical corrections that can be applied for that particular satellite. Various models might not be available for the correct time and location and instrument failure might call for altimeter specific corrections (e.g., Naeije et al. 2002). Satellite-specific investigations of various range and geophysical corrections are a huge subject and will not be discussed in this chapter. Interested readers can consult the web site of the T/P-OSTST community (http://sealevel.jpl.nasa.gov/).
The chapter will be completed with a section into available mean sea surfaces for the derivation of sea level anomalies. With the increasing use of satellite altimetry for climate purposes and the constant improvement in the accuracy of sea surface height and sea level anomalies relative to a mean sea surface, this subject is becoming an area of increasing importance. Small differences between recent mean sea surface models of the order of ±10 cm are directly related to the range corrections applied at the time of derivation. Consequently, users requiring highly accurate satellite altimetry observations should be sure to use consistently derived altimetric products. Users should also be aware of the fact that some large-scale signals detected in sea level anomalies can be related to the use of different range and geophysical corrections available on state of the art altimetric products and state of the art available mean sea surfaces.
5.4 Dry Troposphere Refraction
The correction for refraction from dry atmospheric gases is by far the largest adjustment that must be applied to the range as shown by its mean value in Table 5.1. The vertical integration of the air density is closely related to the pressure, and the dry troposphere correction is for most practical purposes approximated using information about the atmospheric pressure at sea level (or sea level pressure, SLP) and a refractivity constant of 0.2277 cm3/g. Formulations for the dry troposphere refraction is described and derived in length by (Smith and Weintraub 1953; Saastamoinen 1972) and is conveniently given in units of cm as
where P 0 is the SLP in hecto-Pascal (hPa) and the coefficient in the parenthesis is the first order Taylor expansion of the latitude (ϕ) dependence of standard gravity evaluated at the location of observation to account for the oblateness of the Earth.
Since direct observations of SLP are infrequent and sparsely distributed, data from operational weather models are generally used. The two most widely used models are the European Centre for Medium-Range Weather Forecasts (ECMWF) and the U.S. National Centers for Environmental Prediction (NCEP). Both of these are delivered on regular grids at regular intervals and the surface pressure is then interpolated from these grids (Fig. 5.3).

The mean (upper plot) and standard deviation (lower plot) of the ECMWF based dry troposphere correction. The values have been computed from 6 years of Jason-1 data. Range corrections are given in centimeters
The spatial distribution of the dry troposphere correction computed from the ECMWF model features a latitudinal dependency, with highest values (−2.33 m and a standard deviation of a few centimeters) around the subtropical gyres and smallest values at high latitudes (−2.27 m and standard deviation around 4–6 cm).
The dry troposphere correction has long spatial scales and it varies only slowly compared with the wet troposphere. This means that the dry correction is relatively unaffected by the presence of land and is not expected to degrade significantly close to the coast. Fu et al. (1994) reported an accuracy of the dry troposphere correction of 0.7 cm, degrading slightly towards the coast.
Fig. 5.4 shows the standard deviation of residual sea surface height variations applying the dry troposphere correction based on ECMWF and NCEP as a function of the distance to the coast. Six years of Jason-1 data have been used and averaged in bins of 2 km as a function of the distance to the coast in order to investigate the quality and difference between the corrections in coastal regions. Comparing the standard deviation of the residual signal while leaving all other corrections unchanged evaluates the two models. A lower standard deviation will indicate that the correction removes more “signal,” indicating that the correction is more efficient (better). Data for this and the following analysis of other corrections have been extracted from RADS and editing of data close to the coast has been disabled, as this would otherwise have removed too many data closer than around 30 km to the coast for Jason-1.

The residual sea surface height variation (in cm) from 6 years of Jason-1 observations corrected using the ECMWF and NCEP based dry troposphere correction and then shown as a function of the distance to the coast (in km)
Interpreting the curves in Fig. 5.4 for the ECMWF and NCEP dry troposphere correction shows that it is basically impossible to tell the two curves apart indicating that the two models have removed the same amount of signal and are presumably of same accuracy. The investigation also confirms that there is only very minor difference (<5 mm) between these two corrections, which is naturally also a consequence of the low temporal variability of the correction. The increase in residual sea surface height closer to the coast is due to increased sea level variability in shallow water depth and not related to the corrections.
A commonly made error in the production of altimeter products (e.g., Jason-2) is to replace the sea level pressure grids by surface pressure grids. The difference between the two is the level at which the pressure is calculated: the former is the pressure at sea level, the latter at the surface. Over oceans the difference is, in principle, irrelevant, since both refer to sea level. However, most atmospheric models are currently based on the linear combination of Gaussian distributions of several spatial scales. As a result, coastal grid points are determined in part by Gaussians centered on points in-land. When the coast is of significant elevation, the surface pressure in-land will be much lower, and thus artificially lower the surface pressure over coastal seas. For example, near Greece errors of a few kPa (several cm of path delay) arise from this error. When using the dry tropospheric correction near the coastline, it should be verified that it was based on sea level pressure grids and not surface pressure grids.
5.5 Wet Troposphere Refraction
The wet troposphere refraction is related to water vapor in the troposphere, and cloud liquid water droplets. The water vapor dominates the wet tropospheric correction by several factors, and the liquid water droplet from small to moderate clouds is generally smaller than one centimeter (Goldhirsh and Rowland 1992).
Although smaller than the dry tropospheric range correction in magnitude, the wet troposphere correction is more complex with higher temporal variations, with rapid variations in both time and space and therefore also needs careful attention in the coastal region. The correction can vary from just a few millimeters in dry, cold air to more than 30 cm in hot, wet air.
The water vapor range correction is in its most simple form is given from the following equation in units of cm as
which involves a vertical integration of the water vapor density σ vap in grams per cubic centimeters (g/cm3). The equation has been simplified by replacing the altitude dependent temperature T of the troposphere with a constant temperature. More advanced formulas are often considered (e.g., Eymard and Obligis 2006).
The columnar water vapor can be estimated using downward looking passive microwave radiometers onboard the satellite or from a collection of ground-based observations integrated into a time-stepping model like ECMWF. As shown in Fig. 5.5, the correction has significant temporal and spatial variability, which stresses the importance of having simultaneous observations of the columnar water vapor and radar altimetric observations of the sea surface height.

The mean (upper plot) and standard deviation (lower plot) of the wet troposphere correction from radiometer observations of columnar water vapor from 6 years of Jason-1 data. The values are given in centimeters
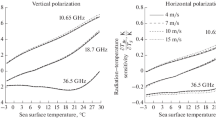
Accurate water vapor estimates can be obtained from three-frequency microwave radiometers available on satellites like TOPEX/Poseidon, Jason-1, and Jason-2. The onboard nadir looking microwave radiometer on TOPEX (TMR) or Jason (JMR) uses the microwave radiation received by the satellite to determine the brightness temperature of the ocean surface around 18.7, 23.8, and 34 GHz (for Jason-1) and the instrument provides nearly direct measurements of the wet troposphere correction by monitoring the strong water vapor absorption line centered at 22.235 GHz and using the two other frequencies to separate this from the liquid water and surface winds. High accuracy relies both on the retrieval method but also on instrument calibration and drift calibration (e.g., Ruf 2002)
Keihm et al. (2000) demonstrated from T/P data, that the accuracy of the wet troposphere correction is around 1.1 cm in the open ocean, even when heavy clouds and wind are present in the microwave foot print. For two-frequency microwave radiometers onboard the ERS, GFO, and Envisat satellites, the accuracy is somewhat less than for three-frequency radiometers (e.g., Schrama et al. 1997). Microwave radiometers are prone to drift and calibration errors are an important issue, so a huge effort is devoted to limit this effect on the range corrections, in order to obtain the best long-term sea level estimate (e.g., Keihm et al. 2000).
The mean of the wet troposphere signal taken from the onboard radiometer on Jason-1 and averaged over 6 years is shown in Fig. 5.5. It has a strong dependency on latitude, with highest values in the equatorial band (−30 cm) and smallest values in the Antarctic circumpolar current (–5 cm). The lower part of the figure shows that the average standard deviation of the signal is around 5 cm. The lowest variation is found close to Antarctica and the highest temporal variability is found at mid-latitude, where it reaches up to 10 cm in the western part of the Pacific Ocean.
The footprint of the radiometer is dependent on the height of the spacecraft and the scanning frequency of the radiometer, but typical values of the footprint of the main beam range between 20 and 30 km. This is considerably larger than the 4–10 km footprint of the altimeter as illustrated in Fig. 5.6 for a pass across the Western Mediterranean Sea. Consequently, the radiometer is contaminated by the presence of land much earlier than the altimeter, as the spacecraft approaches the coast and generally the main beam is affected up to 30 km from the coast. The wet troposphere correction derived from the onboard radiometer is similarly affected, and a lot of research is put into improving the wet troposphere correction in coastal regions (i.e., Obligis et al. 2009).

An example of a Jason-1 track crossing the western Mediterranean Sea. Blue dots indicate the footprint of the altimeter and green circles show the extent of the main beam of the radiometer. The figure illustrates where the radiometer observations are contaminated by land. (Modified from Eymard and Obligis 2006)
The effect of land on the accuracy of the radiometer derived wet troposphere correction, can be as large as 2–4 cm (Brown 2008) close to the coast within the main beam. However, effects can be seen out to 60 km when the side lobes of the main beam get affected (effects up to 2–4 mm). Land has larger emissivity than ocean, and the presence of normally, much warmer land degrade the humidity retrieval methods thus degrading the accuracy of the correction. A number of studies are currently ongoing in order to improve the correction close to the coast.
Fig. 5.7 illustrates how the various available wet troposphere corrections are affected in the coastal zone, by showing the residual sea surface height variation applying two different wet troposphere corrections. As before 6 years of Jason-1 data have been averaged with respect to the nearest distance to the coast.

The residual sea surface height variation (in cm) applying the wet troposphere correction from the onboard radiometer and interpolated from ECMWF columnar water vapor estimates averaged in 2 km bins as a function of the distance to the coast (in km)
The onboard radiometer reduces the sea surface height variability slightly more than the interpolated ECMWF correction everywhere in the deep ocean to roughly 50 km from the coast, with the radiometer reducing the sea surface height variability between 10% and 20% more than the ECMWF corresponding to between 5 and 10 mm.
Closer than 50 km to the coast, where the radiometer observations are expected to degrade, the radiometer correction still performs equally accurate to the ECMWF model. This is most likely due to the fact that the ECMWF model also degrades close to the coast where the correction changes rapidly and observations are lacking. All the way until around 10 km from the coast, where the radiometer corrections becomes seriously contaminated by land, it still performs equally accurate to the ECMWF model values. Overall the analysis shows that the accuracy of the correction degrades from around 1.1 cm in the open ocean to roughly half the accuracy at around 30 km from the coast. This number is hard to confirm exactly, as the result showed that both the radiometer and the ECMWF model based correction degrades equally all the way to 10 km from the coast.
The chapter by Obligis et al., this volume, investigates two methods to improve the retrieval of the wet troposphere correction in the coastal zone. One uses the Dynamically Linked model (DLM) based on the dynamic combination of radiometer measurements, model data, and GPS/GNSS-derived path delay estimates. The second approach investigates the measured brightness temperatures in order to remove the contamination coming from the surrounding land and hereby improving the accuracy of the radiometer observations in the coastal zone.
5.6 Ionosphere Refraction
The refraction of electromagnetic waves in the earth’s ionosphere is directly linked to the presence of free electrons and ions at altitudes above about 100 km. At this altitude high-energy photons emanating from the sun are able to strip atomic and molecular gasses of an electron. At lower altitudes, up to about 300 km, NO+ and O +2 are the most prevalent species, while at higher altitudes, stretching even far above the altitude of the radar altimeters, we find H+, O+, N+ and He+ (e.g., Bilitza 2001).
The interaction between the electromagnetic waves and the ions causes the waves to slow down by an amount proportional to the electron density in the ionosphere. Hence, the total delay incurred on the altimeter radar pulse along its path through the ionosphere is proportional to the number of electrons per unit area in a column extending from the earth surface to the altimeter. This columnar electron density count is referred to as the Total Electron Content (TEC). The TEC unit, or TECU, equals 1016 electrons/m2.
The ionospheric correction (the negative of the delay) is also inversely proportional to the square of the radar frequency:
where k is a constant of 0.40250 m GHz2/TECU. At the Ku-band frequency of approximately 13.6 GHz, this means that the ionospheric delay amounts to about 2 mm for each TEC unit (Schreiner et al. 1997).
Since the delay is dispersive, the delay at the two frequencies will be different. If the frequencies differ significantly, then the difference in their path delay (and hence the difference in their total travel time) can be used as a measure for the TEC value. This difference in path delay is used most prominently by geodetic GPS systems, measuring at two frequencies (L1 and L2) to eliminate the effect of the ionospheric delay on the GPS positions. The more recent high-precision altimeters (TOPEX, Jason-1, Envisat, and Jason-2) also carry dual-frequency altimeters with the same purpose: estimating TEC to be able to correct for the ionospheric path delay in the primary Ku-band range measurement.
The secondary frequencies used in altimetry are in the C-band (TOPEX and Jason: 5.3 GHz) and S-band (Envisat: 3.2 GHz). The range measurements at these frequencies are inherently less precise than the Ku-band ranges. Differencing the range measurements at two frequencies creates a rather noisy estimate of the ionospheric delay, which needs to be smoothed over about 200 km along the altimeter tracks in order to not adversely impact the altimeter measurement precision, while still capturing most of the important features of the global distribution of the total electron content (Imel 1994).
As Fig. 5.8 shows, the ionospheric correction is largest, both in mean magnitude and in variation, along two bands paralleling the geomagnetic equator (approximately −10 and 6 cm, for the mean and standard deviation, respectively). Towards the poles, the magnitude becomes smaller and also much more predictable, as its variation drops. One should not be deceived by the relative homogeneity of the mean: the variations are in places almost as large as the mean. The local variation of the ionosphere depends on a number of factors: season of year, time of day, and solar activity.

Mean (upper plot) and standard deviation (lower plot) of the ionosphere range correction from smoothed dual-frequency altimeter observations based on 6 years of Jason-1 data. Values are given in centimeters
The annual variation is generally relatively small and is mainly due to the changing orientation of the sun with respect to the geomagnetic field. Seasonal changes in TEC levels are most prominent in Polar Regions where summer levels go up to about five times the winter levels. The variation during the day is quite marked: TEC levels can increase about ten-fold between their lowest level around 2:00 at night local time and their highest level 12 h later at 14:00 local time. Finally, the dependency on solar activity closely follows the 11-year cycle in solar radio flux (F10.7, as depicted in Fig. 5.9). This gives a variation by a factor of 5 between low and high solar activity.

Variation of the solar 10.7-cm radio flux during the last two solar cycles. The duration of the altimeter missions is shown by rectangles. The outlined rectangles of TOPEX, Jason-1, Jason-2, and Envisat indicate the availability of dual-frequency measurements. TEC models are shown at the bottom
Since the ionosphere is insensitive to coastlines, unlike the way the wet troposphere is strongly influenced by coastal dry or wet atmospheric currents, one would not expect that modelling ionospheric path delay near coasts is any different from doing so anywhere on the open ocean. But be not deceived: the majority of the Indian Ocean and Western Pacific coastline is located beneath the most volatile region of the ionosphere. Secondly, when based on dual-frequency altimeter measurements, the ionospheric correction will eventually be affected by land in the altimeter footprint. This, however, will largely coincide with the general deterioration of the altimeter range measurement.
As an alternative to dual-frequency altimeter measurements, a number of climatological models have been in use, like the Bent model (Llewellyn and Bent 1973) or the International Reference Ionosphere (IRI) (e.g., Bilitza 2001; Bilitza and Reinisch 2008). These climatological models attempt to find systematic behavior in the temporal and spatial variation of historical TEC data and correlate those with one or two global ionospheric forcing parameters, like solar radio flux or sun spot number, to estimate TEC at any location on the globe.
More recently, observational models are being produced based on alternative satellite dual-frequency measurements. Since 1998, both the Jet Propulsion Laboratory and the University of Berne produce 6-hourly maps of the TEC based on observations by over a hundred GPS stations in the IGS network (e.g., Komjathy and Born 1999; Komjathy et al. 2005). These GPS-derived global ionosphere maps (GIM) can be interpolated in space and time to the altimeter ground track and come close to the accuracy of the dual-frequency altimeters. A complication is that the GPS measurements integrate TEC to about 20,000 km altitude, while altimeters fly only at 800 or 1,350 km altitude, and thus see only a portion (even though the major portion) of the ionosphere (Iijima et al. 1999).
The NIC09 ionosphere climatological model (Scharroo and Smith 2010) is based on the GIMs for 1998–2008 and can also be applied to all single frequency altimeter data prior to 1998. Just as other TEC models, its accuracy is more or less proportional to the TEC itself. At 18% error, NIC09 comes close to the JPL GIM model accuracy of 14% and is much better than the 35% error of the most recent IRI model (IRI2007).
Another way of estimating TEC is using the Doppler Orbitography and Radiopositioning Integrated by Satellite (DORIS) system, which is used primarily for orbit determination for T/P and Jason. This ground-based set of beacons can also be used to determine the integrated electron content along the line of sight between the satellite and the DORIS transmitter which can then be combined with a model to derive TEC. However, given the lack of accuracy compared to the GPS-based ionosphere maps, the production of DORIS ionosphere maps has ceased and their values are no longer reported on the altimeter data products.
Since all of these ionosphere models are global, they are not affected by the presence of coastlines. This gives us an opportunity to look at the impact of land in the altimeter footprint on the determination of the ionospheric correction.
Fig. 5.10 shows the RMS sea level anomaly as a function of the distance to the coast while applying two different ionospheric corrections: based on the dual-frequency altimeter measurements or the JPL GPS ionosphere maps (Web1). At this level the differences are minute. A more detailed portrayal of the accuracy of the ionospheric corrections is given in Fig. 5.11, where the various models are compared to Jason-1. Since this comparison was made during low solar activity, the model errors are rather low (less than 1 cm), but still far exceeding the comparison between the dual-frequency altimeter measurements of Jason-1 and Jason-2. The semblance of an increased error at distances shorter than 100 km from the coast is certainly not due to contamination of the altimeter footprint. Rather, the increased error of the dual-frequency correction should be sought in prevailing conditions near the coast that could make the measurements less accurate: such as unusual sea states (lower than common wave heights) and short-wavelength variations in the wind fields. In addition, the smoothing process of the ionosphere correction will also become one-sided, producing a noisier smoothed value.

The residual sea surface height variation (in cm) applying the ionospheric correction from the dual-frequency altimeter or the interpolated JPL GIM estimates averaged in 2 km bins as a function of the distance to the coast (in km)

The root-mean-square difference of several ionosphere correction models compared to the Jason-1 dual-frequency correction during Jason-1 Cycle 246 (9–19 September 2008). The RMS difference between the dual-frequency corrections as measured by Jason-1 and Jason-2 along their collinear tracks is depicted as well
In general, the dual-frequency ionosphere correction applies well to coastal data. Where there is no direct measurement of the electron content available, the JPL GIM or NIC09 models will suffice.
5.7 Sea-State Bias Correction
The sea-state bias (SSB) correction compensates for the bias of the altimeter range measurement toward the troughs of ocean waves. This bias is thought to arise from three interrelated effects: an electromagnetic (EM) bias, a skewness bias, and an instrument tracker bias. Radar scattering (EM) bias is physically related to the distribution of the specular facets. The elevation skewness bias is related to the fact that the altimeter uses a median tracker, while the mean is the desired parameter. The instrument tracker bias is related to the specific tracker used to estimate the significant wave height (SWH) derived from the waveform (e.g., Brown 1977), where the SWH represents the average height of the 1/3 highest waves considered.
The SSB was originally modeled as a simple percentage of the SWH (e.g., Δh ssb = -0.04 SWH), explaining that, with increasing SWH, altimeter ranges longer or more below the mean sea surface within the altimeter footprint.
The SSB also depends on the wind field and the different wave types (e.g., fully developed swell waves versus wind waves). Therefore, a more advanced parametric model consisting of four parameters has been introduced to describe the SSB (Chelton 1994; Gaspar et al. 1994). The model is generally referred to as the BM4 model:
where U is the wind speed derived from the backscatter coefficient. This formula gives the total SSB correction including all the three contributions to SSB mentioned above, as all of these are dependent on the SWH.
Each altimeter will have a different set of coefficients for the parametric estimation of the four parameters (a 1, a 2, a 3 and a 4). Table 5.3 illustrates how different the empirically estimated parameters are for six different altimeters (Scharroo and Lillibridge 2005). The big spread seen in the a 1 parameter represents the linear scaling of the SWH parameter on the SSB correction.
In principle, the dependence on wind speed, U, and significant wave height of the SSB should be estimated nonparametrically rather than by a preassumed functional form like the one given above. Several authors have experimented with nonparametric estimations of the SSB (e.g., Chelton 1994; Rodrigues and Martin 1994). The nonparametric method for estimating the SSB developed by Gaspar and Florens (1998) represents a significant improvement compared to the classical parametric methods and better retrieves wind and wave related variations. It improved the estimation of rare sea-state events, improving the SSB accuracy up to a few centimeters for some of the sea states.
To avoid specification of a parametric formulation of the SSB model, Gaspar and Florens reformulated and solved the SSB estimation problem in a totally nonparametric way based on the statistical technique of kernel smoothing. This method has since been refined and enhanced significantly (Labroue et al. 2006); and the uncertainty of the new TOPEX SSB estimate is now close to 1.1 cm (Labroue et al. 2008).
The spatial pattern from 6 years of Jason-1 observations is shown in Fig. 5.12. The nonparametric SSB correction has smallest magnitude at low to mid latitudes (from −5 to −10 cm mean value with a standard deviation around 1 cm) and highest values at high latitudes (up to −20 cm in the mean value with standard deviation variability greater than 5 cm).

The mean (upper plot) and standard deviation (lower plot) of the nonparametric sea-state bias correction for Jason-1. Values are given in centimeters
In order to evaluate the BM4 parametric and the nonparametric sea-state model in the coastal zone, Fig. 5.13 shows the standard deviation of residual sea surface height variation from 6 years of TOPEX observations applying the BM4 and the CLS nonparametric SSB model (Jason-1 data unavailable with both corrections).

Standard deviation of residual sea surface height variation from 6 years of TOPEX observations applying the BM4 and the CLS nonparametric SSB model
The temporal variation of the SSB correction is only a few cm in most places. Therefore it is hard to determine which correction model reduces the variability of the sea surface height the most and both seem to be performing equally accurate in coastal regions.
In the coastal zone there are several complications to SSB computation. One is the fact that the changing shape of the waves and the wind propagation, as well as interaction with bathymetry and the coastal shape will create more noisy waveforms and hence more noisy SWH estimates.
Furthermore, the retracking bias is related to the specific waveform shape (mostly Brown) and the retracker used to derive the height from the waveform, will need to be changed or made more tolerant close to the coast as the waveform shape changes (see the chapter by Gommenginger et al., this volume).
To examine the effects of changing waveforms, Fig. 5.14 shows how Envisat waveform changes when the altimeter approaches the coast. The plots shows a track going from land to sea in the left panel and a track going from sea to land in the right panel. The along-track distance to the coast is shown on the vertical axis and the figure should be read horizontally with one line for each distance to the coast. Each horizontal line represents the power in each of the 128-Envisat recording bins for each 18-Hz observation, with red colours representing high power and blue colours representing low power. Normal Brown waveforms are seen away from the coast in the top of the figure. In the left panel, the waveforms are more or less Brown (Brown 1977) all the way until 15 km from the coast. However, the waveforms on the track approaching the coast (right panel) are less affected by the coast and more or less Brown all the way to 8 km from the coast. Closer than this the waveform shapes change and retracking using more tolerant retrackers is needed if sea surface height shall be retrieved (Berry et al. 2005).

The waveform power (red high and blue low) as a function of the distance to the coast. Two Envisat tracks close to Italy in the northeast part of the Western Mediterranean Sea are shown. The along-track distance to the coast is shown on the vertical axis and the waveform power in each 128 bins along the horizontal axis. Normal Brown waveforms are seen away from the coast in the top of the figure, but close to the coast and on land the waveforms are distorted (Fenoglio-Marc 2008). Black dots indicate track point and location of available 1-Hz SSH observations
SWH, and thus SSB parameters, can currently only be estimated for Brown waveforms which limits SSB estimation to roughly 10–15 km from the coast. However in the future more research is needed into retracking and how to estimate SSH as well as SWH and SSB parameters closer than roughly 10–15 km from the coast.
Fig. 5.14 also illustrates how dramatically the waveform shape changes within 1 s. This also illustrates the importance of applying the corrections on the individual 18-Hz data and not on the 1-s averaged values in future altimetric products close to the coast.
5.8 Tide Corrections
The ocean tide correction is by far the correction that reduces the temporal sea surface height variance the most. In an analysis of collinear differences of sea surface heights, Ray et al. (1991) found that the ocean tides were responsible for more than 80% of the total signal variance in most regions.
Besides the dominating ocean tide signal, the tidal correction includes correction for several smaller tidal signals: the loading tide, the solid earth tide, and the pole tide. The sum of the tidal corrections can be written as
Below each of the tidal contributions are described. However, only the ocean has been analyzed in coastal regions. The solid earth and pole tide correction are independent of coastal regions and are normally derived using closed mathematical formulas.
5.8.1 Ocean Tide
The altimeter senses the geocentric or elastic ocean tide, which is the sum of the ocean and load tide:
This is in contrast to tide gauges fixed to the sea bottom which only measure the ocean tide. As the altimeter measures from space, it observes the sum of ocean tide and small loading displacement of the ocean’s bottom due to the loading by the water column. The load tide has a magnitude of 4–6% of the ocean tide and can be determined by a convolution of the ocean tide and the response of the upper lithosphere to the ocean loading by that model (i.e., Scherneck 1990; Agnew 1997).
The determination of the ocean tides have dramatically improved since the launch of TOPEX/Poseidon and most recent investigations indicate that global models are now accurate to around 1–2 cm in the global ocean. The tidal signal has much higher frequency than the sampling of the satellite (0.5 days versus 9.9 days sampling for TOPEX/Poseidon). Therefore, the tidal signal is aliased into periods longer than 20 days because of the subsampling of the satellite (i.e., Andersen 1995). One example is the largest semidiurnal constituent M2, which is aliased into a signal with a period of 62 days by the 9.9156 days sampling of TOPEX/Poseidon and Jason.
The amplitude of the M2 constituent is shown in Fig. 5.15 from the global ocean tide model called GOT4.7. This model is from 2006 and is the latest in a sequence of empirical ocean tide models derived from satellite altimetry (Ray 2008). The model corrects for the major eight diurnal and semidiurnal constituents (K1, O1, P1, Q1, M2, S2, K2, N2) along with a number of smaller constituents. Furthermore, a number of local tide models have been patched into GOT4.7 for several coastal regions like the Bay of Fundy on the Canadian and US east coast.

M2 amplitude from the GOT4.7 ocean tide model (Ray 2008). The amplitude is given in cm and the largest amplitudes are found in the English Channel and Bay of Fundy on the Canadian and US east coast
The 2D Finite Element Solution FES2004 (Lyard et al. 2006) is another widely used global ocean tide model based on assimilation of satellite altimetry into a time-stepping finite element hydrodynamic model. The FES models were pioneered by Christian Le Provost in the early 1990s (Le Provost et al. 1994) and have been developed since to include 15 tidal constituents distributed on 1/8° grids. Both the GOT4.7 and FES2004 include corrections for long period tides and also the largest quarter diurnal shallow water constituent M4.
Fig. 5.16 shows the standard deviation of the ocean tides correction, which closely resembles the amplitude of the largest ocean tide constituent M2 in Fig. 5.15, indicating that in large parts of the ocean, the standard deviation of the ocean tide signal is larger than 50 cm.

The standard deviation of the ocean tide correction given in centimeters
The tidal range is larger in coastal regions than in the open ocean, and coastal tidal waves are much more complex. The pattern of the tidal waves is scaled down as the speed of the tidal wave reduces, because bottom friction modifies the progressions of the tidal waves. Similarly, resonance and near-resonance responses add to the complexity of the tidal pattern and produce some of the world’s largest tidal amplitudes like in the Irish Sea (Britain) or in the Bay of Fundy, where amplitudes reach 10 m. This also means that mis-modelling or omission of tidal constituents in particularly coastal regions, will potentially create large differences between the ocean tide models like FES2004 and GOT4.7.
In order to investigate the correction in coastal zones, Fig. 5.17 shows the standard deviation of residual sea surface height variation applying the FES2004 and GOT4.7 ocean tide models. It clearly illustrates, that in the deep ocean there is virtually no difference between the two models. However in coastal region there is significant difference in the models and here GOT4.7 is clearly reducing more sea surface height variability than FES2004.

Standard deviation of residual sea surface height variation from 6 years of Jason-1 observations applying the FES2004 and GOT4.7 ocean tide models
In order to explore the difference between the FES2004 and GOT4.7 ocean tide model a bit further, the spatial pattern of the standard deviation of residual sea surface height variations of FES04 minus GOT4.7 is given in Fig. 5.18. Yellow and red regions indicate that GOT4.7 reduces the residual sea surface variability more than FES2004. The improvement ranges up to 2–4 cm in some regions and the largest improvement is clearly seen in coastal regions which are known for very large coastal tides like the North Sea, the Patagonian shelf, the Yellow Sea, and around Indonesia.

The standard deviation of residual sea surface height variations computed from the difference between FES2004 and GOT4.7 (in cm). Where the signal is yellow and red GOT4.7 reduces the residual sea surface variability more than FES2004
This investigation stresses the importance of further improving ocean tide modelling in coastal regions. Improving the ocean tide model in particular shallow water region is still the single correction where the largest accuracy gain can still be made.
Recent investigations by, e.g., Ray (2008) and Roblou and Lyard (2008), also demonstrate the potential improvement of future ocean tide models by improving bathymetry, improved modelling (3D), improved inversion strategies, modelling of wetting and drying, an inclusion of more shallow water constituents (e.g., Andersen et al. 2006b) and inclusion of data from the TOPEX and Jason-1 interleaved missions.
One approach is using data assimilation with nested high-resolution models tied to lower resolution global models. This approach appears feasible, but it places severe demands on the accuracy and resolution of bathymetry data. However, Ray et al. (2009) demonstrate the importance of using this approach for future development of future global ocean tide models.
In the deep ocean, recent investigations showed that ocean tide has an accuracy of around 1.4 cm (e.g., Bosch 2008). However, the global ocean tide model still have errors exceeding 10–20 cm close to the coast as also demonstrated by Ray (2008) in a comparison with coastal tide gauges.
5.8.2 Solid Earth Tide Correction
The solid Earth tide is the response of the solid Earth to gravitational forces of the Sun and the Moon. As the response is fast enough to be considered in equilibrium with the tide-generating forces, the tidal elevation is proportional to the tidal potential. The proportionality is determined by the Love numbers, and the solid Earth tide is computed using closed formulas as described by Cartwright and Taylor (1971) and Cartwright and Edden (1973). The magnitude of the solid earth tide ranges up to ±20 cm and the correction is assumed to be highly accurate. The permanent part of the Earth tide, due to the simple presence of Sun and Moon, is explicitly excluded since the solid earth tide correction only deals with temporal height variations.
5.8.3 Pole Tide Correction
The variation of the Earth’s axis of rotation with respect to its mean geographic pole has a period around 428–435 days and amplitude varying between 0.002″ and 0.30″. This variation is called the Chandler Wobble after Seth Carlo Chandler, who confirmed its existence in 1891 through observations of latitude. The changes in the centrifugal forces due to the variation of the Earth’s axis produce a signal in sea surface height at the same frequency, called the pole tide. Unlike other luni-solar tides, the pole tide has nothing to do with the gravitational attraction of the Sun and Moon. Furthermore, the tide has the ability to modify what is presumably its own generation mechanism (i.e., the Chandler Wobble). The pole tide is computed as described by, e.g., Wahr (1985) to high accuracy.
5.9 Dynamic Atmosphere Correction
The ocean reacts roughly as a huge inverted barometer, coming up when atmospheric pressure is low, and down when pressure rises. The sea surface height correction due to variations in the atmosphere, is divided into low-frequency contribution (periods longer than 20 days), and a high-frequency contribution (periods shorter than 20 days).
For the low-frequency contribution the classical inverse barometer correction is used to account for the presumed hydrostatic response of the sea surface to changes in atmospheric pressure (Wunsch and Stammer 1997). One hecto-Pascal increase in atmospheric pressure depresses the sea surface by about 1 cm. Consequently, the instantaneous correction to sea level can be computed directly from the surface pressure and in units of cm it is given like
where P 0 can be determined from the dry troposphere correction. P ref is the global “mean” pressure (reference pressure). Traditionally a constant global value of 1,013.3 hPa has been used as this value is the average pressure over the globe.
However, the mean pressure over the globe is not identical to the mean pressure over the ocean. Fig. 5.19 shows that the mean pressure over the ocean is closer to 1,011 hPa. Furthermore, the figure shows that the global mean pressure is not constant, but has annual amplitude of roughly 0.6 hPa. When applying an inverse barometer correction with a non-constant reference pressure, the standard deviation of the residual sea surface height signal is lower than when applying an inverse barometer correction with a constant reference pressure. This shows that using a non-constant reference pressure for the low-frequency part of the correction better corrects atmospheric pressure effects.

Global mean pressure integrated over the oceans from the ECMWF model for the period 1985–2005. The global mean pressure is around 1,011 mbar (hPa) and it has a clear annual signal with amplitude of roughly 0.6 mbar
The ocean has a dynamic response to pressure forcing at high frequencies (periods below 5 days) and at high latitudes. Furthermore, investigations have shown that wind effects prevail around the 10-day period (Fukumori et al. 1998; Ponte and Gaspar 1999; Fu et al. 2003; Pascual et al. 2008) and that signals up to this frequency should be removed as they might be aliased by the sub-Nyquist sampling of the satellite (9.9156 days for Jason-1, 35 days for Envisat) into lower frequency signals of longer periods greater than twice the sampling interval for the satellite (i.e., longer than 20 days for Jason-1), and this will pollute the sea surface height signal if not corrected.
Global adjustment for high-frequency sea level variability has been implemented using a MOG2D model (Carrère and Lyard 2003). The MOG2D (two-dimensional Gravity Waves model) is a barotropic, nonlinear, and time-stepping model with the model’s governing equations being classical shallow water continuity and momentum equations. The finite elements space discretization, allows for increasing the resolution in shallow water areas and other areas of interest like strong topographic gradients-areas. The grid size ranges from 100 km in the deep ocean to 10 km in coastal, shallow seas. MOG2D_IB is a combined dynamic atmosphere correction that combines an inverse barometer correction for time scales longer than 20 days with a MOG2D model for high-frequency variability with timescales shorter than 20 days.
The spatial distribution of the mean and variance of the MOG2D_IB correction is given in Fig. 5.20 and is quite similar to the spatial pattern of the dry troposphere correction in Fig. 5.3, but with quite different amplitudes: mean range is from −10 cm around the 30° parallels to 15 cm at high latitude. Similarly, the standard deviation of the correction changes dramatically from a few cm around the Equator to 10–15 cm at high latitudes.

The mean (upper plot) and standard deviation (lower plot) of the dynamic atmosphere correction based on MOG2D_IB correction. Values are given in centimeters
Investigation of the inverse barometer correction and the MOG2D_IB dynamic atmosphere correction in coastal regions is shown in Fig. 5.21. Again, the standard deviation of residual sea surface height from 6 years of Jason-1 data applying the two models is shown. The figure reveals that MOG2D_IB removes considerably more sea surface variability in coastal regions compared with the traditional inverse barometer corrections. This is a direct effect of the inclusion of correction for temporal frequencies shorter than 20 days in the MOG2D_IB correction. In many regions, the improvement is as large as 10–15 mm, corresponding to 10–30% reduction of the residual sea surface height signal.

Standard deviation of residual sea surface height variation (in cm) applying the inverse barometer correction and the MOG2D_IB
A closer investigation into which coastal regions benefit from the use of the MOG2D_IB model can be seen in Fig. 5.22. This shows the difference between residual sea surface height variation from MOG2D_IB and from a local inverse barometer correction. The largest improvement is found in the North Sea and in the Yellow Sea where the improvement is more than 30% compared with the inverse barometer correction, but also large regions in the Antarctic Circumpolar Current region benefit from using the MOG2D_IB model.

Difference between standard deviation of residual sea surface height variation from MOG2D_IB and a local inverse barometer correction. Region of red and yellow colours indicate, that MOG2D_IB removes more sea surface height variability by including a correction for periods shorter than 20 days. Units are in centimeters
The accuracy of the dynamic atmosphere correction is naturally limited by the uncertainty in the sea surface atmosphere pressure with global accuracy estimate of roughly 1 cm (Fu and Cazenave 2001). The error is somewhat higher closer to the coast where the inclusion of the high-frequency component will increase the error, even though it still removes more dynamic atmospheric related signal.
The presented comparison clearly demonstrates the importance of including the high-frequency variability extension to the local inverse barometer correction in shallow water regions for further improvement of the dynamic atmosphere correction in the future. Numerous local surge models are available for the high-frequency part of the dynamic atmosphere correction. The use of high-frequency sea level modelling by applying high-resolution storm surge models is further pursued in the chapter by Woodworth and Horsburgh, this volume, who demonstrate the successful application of storm surge modelling results on the Northwest European shelf. The application of local models has both pros and cons but the patching of these models into a global model is a huge task and the largest obstacle for using this approach in the future. Woodworth and Horsburgh also make clear that the continued development of global barotropic models is important to provide corrections for all coastal areas in future coastal altimetric product.
5.10 Geoid and Mean Sea Surface Models
The geoid height dominates the set of geophysical corrections with variation ranging from −105 m south of India to +85 m north east of New Guinea and spatial variations in the geoid are due to spatial inhomogeneities in the density of the Earth interior and crust as well as variations in the depth of the ocean. The mean sea surface mimics the geoid to within a few meters and consequently the two look alike when plotted (see Fig. 5.2).
For different applications either the geoid or the mean sea surface can be removed from the sea surface height observation. If the study concerns temporal variations of the sea surface from the mean as, e.g., storm surge studies, then the mean sea surface should be removed and not the geoid variations. If the issue is studies of large-scale ocean circulation, then the geoid should be removed. Both of these surfaces can be determined with an accuracy of 10–20 cm (e.g., Pavlis et al. 2008; Andersen and Knudsen 2009).
The global geoid is mainly determined from a compilation of gravity derived from GRACE, satellite altimetric, terrestrial, airborne, and marine observations along with numerous other data sources. The accuracy of the geoid is also fundamental to the precision of orbit determination and therefore in two ways fundamental to the accuracy of sea surface height observations. With the release of the EGM2008 the RMS uncertainty is around 10 cm for the ocean (Pavlis et al. 2008).
The mean sea surface height is a geometrical description of the averaged sea surface height. The DNSC08MSS model is derived from a combination of 12 years of satellite altimetry from a total of nine different satellite missions covering the period 1993–2004 and the RMS uncertainty is between 5 and 10 cm. The DNSC08MSS height was shown previously in Fig. 5.2.
The mean sea surface and the geoid do not coincide because the dynamic sea surface height h D has both a permanent and a time-variable component. The permanent component reflects the steric expansion of seawater as well as the ocean circulation that is very nearly in geostrophic balance. The temporal average of the dynamic topography is called the mean dynamic topography h MDT. The mean dynamic topography is the quantity that bridges the mean sea surface with the geoid height, since
Each of the three quantities can, in principle, be derived from the other two quantities. Long-term mean dynamic topography MDT (Fig. 5.23) can be derived from compilation of 100 years of ship data (Loziers et al. 1994, 1995) but it can also be computed from altimetry and geoid information (e.g., Andersen and Knudsen 2009) or from a merger of both (e.g., Rio et al. 2005). In principle these mean dynamic topography models should agree, but in reality they show very interesting differences (Andersen and Knudsen 2009). With the increased accuracy of new geoid and new mean sea surface models the agreement has been improved significantly, but there are still inconsistencies to be explained in the equation due to inaccuracies in each quantity (Andersen et al. 2006a).

An example of the DNSC08MDT created from filtered differences between the DNSC08MSS and the EGM2008 geoid model. The colour scale is in meters
5.11 Reference Frame Offsets
For joint use of multi-mission studies of sea level variability using satellite altimetry it is important to correct for reference frame differences between the various altimeters, which includes differences between the orbits as well as some other geographical differences in the altimeter-dependent models (like sea-state bias).
One example of these reference frame offsets are models expressed by five spherical harmonic coefficients: C 00 (a constant bias), C 10, C 11, S 11 (shifts in Z, X, and Y direction), and C20 (a difference in flattening). Though these are not standard range or geophysical corrections, they can be treated as a “standard” correction along with the others and this way multi-mission altimetry will be in the same reference frame. Reference frame offsets are implemented in the RADS data archive like a standard sea surface height correction and can easily be applied by the user.
Because it is eventually arbitrary which offset to trust as reference, we chose TOPEX. So all these spherical harmonic coefficients are 0 for TOPEX and the coefficients for the other satellites are relative to the TOPEX coefficients (see Fig. 5.24).

Reference frame offsets of ERS-1, ERS-2, Geosat, GFO, Envisat, and Jason-1 with respect to TOPEX
5.12 Range Corrections and Mean Sea Surface Determination
For oceanographic applications of satellite altimetry, a MSS is used along with the sea surface height observations to create sea level anomalies (hsla) as the MSS can be given with higher accuracy than the geoid along track. For ocean circulation studies, the Mean Dynamic Topography (MDT) is the fundamental parameter. The MSS is determined by averaging satellite-derived sea surface height observations over time. In many cases, the MDT model is determined from the mean sea surface and the geoid (e.g., Rio and Andersen 2009). In some Level-3 products from, e.g., AVISO, the MDT computed from an MSS minus a geoid model is even added back to the altimetric anomalies (Level-3 products) to compute absolute altimetric heights.
It is therefore important that the suite of standard corrections applied to determine the MSS is the same as those used to compute the altimetric anomalies. There is otherwise a possibility that the differences in the corrections will show up the altimetric signal. The issue is equally important for the use of satellite altimetry in both open ocean and in shelf and shallow water regions. This means that the user should be aware of checking that the sea level anomalies (hsla) has been calculated using the same set of corrections that was used for the MSS. If not, the user might get erroneous results, caused by the difference in corrections rather than real ocean dynamic topography.
In order to investigate the scale of the problem, three recent global MSS models were studied for their differences. The MSS height above the reference ellipsoid generally ranges between ±100 m and the difference between various MSS models seldom exceeds 10 cm. This is less than 0.1% of the total range. However, the magnitude of the error can be critical for studies of ocean dynamics.
The differences can be related to three factors: different range corrections applied; different orbital solutions; or a different averaging period for the mean sea surface determination.
The presently two most widely used global MSS models are the DNSC08MSS (Andersen and Knudsen 2009) and the CLS01 MSS model (Hernandez and Schaeffer 2000). The CLS01 MSS model is based on 7 years of satellite altimetry data covering the period 1993–2000 whereas the DNSC08MSS is based on 12 years of data based on the 1993–2004 period. Both of these mean sea surface models are actually already “outdated” with respect to state of the art range corrections, as these have been updated since the models were developed. Therefore an updated version of DNSC08MSS using state of the art range and geophysical corrections was introduced in order to further explore the impact of using an updated set of corrections. Table 5.4 shows the range and geophysical corrections applied for the derivation of the various MSS models.
The difference between the DNSC08MSS and CLS01 mean sea surfaces is shown in Fig. 5.25, The difference between the two mean sea surfaces has a standard deviation of 2.3 cm.

The difference between DNSC08MSS and CLS01 Mean Sea surfaces. An offset of 2 cm has been removed from the difference due to different reference pressure used for the Dynamic Atmosphere correction (Figure courtesy of S. Holmes and N. Pavlis [NGA])
The first important contributor to the difference between the two MSS models is the fact that CLS01 and DNSC08MSS have adopted a different mean reference pressure for the inverse barometer correction (it is otherwise identical). The CLS01 model uses the mean average pressure over the ocean of 1,011 mbar, whereas the DNSC08MSS uses the global mean of 1,013 mbar. This generates a 2 cm global offset or bias between the two mean sea surfaces. This bias has been removed from Fig. 5.25 in order to center the colour scale, so this difference will not show up.
The second feature, which shows up in the difference in Fig. 5.25, is the north–south oriented striations. This striation originates from a combination of different range corrections and is most prominently seen in the central Pacific Ocean. This effect is subscribed to the way that different corrections are averaged in the computation of TOPEX and particularly ERS-2 mean profiles for the MSS models. It is related to averaging of sun-synchronous altimetric observations by particularly the ERS-2 satellite, as ERS-2 data is an important data source in both CLS01 and the DNSC08MSS models.*
The third contributor is the oceanwide difference of ±5 cm from east to west in the Pacific Ocean. This reflects interannual ocean variability that has been averaged out differently for the two MSS. DNSC08MSS is averaged over 12 years (1993–2004) whereas the CLS01 MSS is referenced to the 7-year (1993–1999) period.
This can be seen by computing the differences between identical processed datasets averaged effect of inter-annual ocean variability to 7 years (1993–1999) or 12 years (1993–2004) as shown in Fig. 5.26. The east-west dipole in the difference between CLS01 and DNSC08MSS in the Pacific Ocean is highlighted in the figure. The feature is largely caused by the 1997–1998 El Niño being averaged differently into the 7-year CLS01 period than in the 12-year period for DNSC08MSS. Besides the Pacific dipole structure, interannual ocean variability related to the location of the large current systems like the Kuroshio Current is seen in the figure.

The difference between the temporal mean of 7 and 12 years of TOPEX/Poseidon altimetric data. Interannual ocean variability related to the location of the Kuroshio Current and the El Niño signal is very clearly seen in the figure. The differences range up to ±5 cm with standard deviation of 1.9 cm
An examination of the difference between the older set of range corrections used for derivation of the DNSC08MSS and the new standard set of corrections (shown in Table 5.4) and used for the updated DNSC08MSS is shown in Fig. 5.27. The figure is smoothed with a Gaussian smoother to 1,000 km and the same averaging period of 12 years was used.

Difference between DNSC08MSS and the updated DNDSC08MSS based on state of the art range corrections. Both MSS have been computed over 12 years for the 1993–2004 period
The difference has a mean of 2.2 cm and a standard deviation of 1.9 cm. This reflects the combined effect of different gravity models applied for the orbit computation and different range and geophysical corrections. Most of the mean difference of 2.2 cm is readily explained by the difference in mean pressure for the dynamic atmosphere correction as seen before.
Only the ocean tide correction, the dynamic atmosphere correction, and the sea-state correction have been updated between the two MSS versions, and it was shown previously, that there is no influence on the mean from the ocean tide correction. Therefore the mean differences must be subscribed to differences in the orbits applied and the dynamic atmosphere and sea-state bias corrections applied.
The difference, due to the use of different sets of orbits creates a difference ranging between 0 and 1 cm with a mean value of 0.15 cm, so the major contributor to the difference must be subscribed to the use of the different range and geophysical corrections.
In order to investigate the striation seen in Fig. 5.25 and its relationship to the application of different range and geophysical correction, the difference between 6 years mean profiles using Jason-1 sampled data are shown in Fig. 5.28.

Difference between the mean values of the range corrections using 6 years of Jason-1 altimetry. Upper row is dry and wet troposphere correction. Middle row is ionosphere and dynamic atmosphere correction. Lower row is ocean tide and sea-state bias correction (corresponding to the models listed in Table 5.2). All figures except the sea-state bias correction are shown using a colour scale ranting between ±2 cm. The sea-state bias correction uses ±5 cm
Only the wet troposphere correction in the upper right panel of Fig. 5.28 seems to have striation patterns in the difference between the averaging of the ECMWF model and the radiometer correction. This also corresponds very well with the DNSC08MSS model being produced using the ECMWF wet troposphere correction and the CLS01 MSS being developed using the radiometer wet troposphere correction.
For the dry troposphere, the ionosphere, and the tide ocean tide correction the difference on a six year mean is insignificant. Large differences emerge between the BM4 parametric SSB model and the CLS nonparametric SSB model in the lower right panel of Fig. 5.28. The difference ranges between ±5 cm with some latitudinal pattern. Relatively large differences are found in coastal regions, which indicate that this is an important issue for future research and the users should be aware of consistent use of SSB model for studies of sea level anomalies in coastal regions.
If the user wants to use data from sun-synchronous satellites like ERS-1, ERS-2, and Envisat, the situation is more complicated and more care should be taken.
Fig. 5.3, 5.5, 5.8, 5.10, and 5.12 illustrate the mean value over time of a particular correction computed from six Jason-1 data. If the value was computed using 6 years of Envisat or ERS-2 data a more complicated and different result would emerge. This is because the ERS and Envisat satellites are sun-synchronous. Consequently, sun-synchronous contributions to the range and geophysical corrections will be observed at the same phase and averaging the satellite altimeter observations over time will not average them out. As such these sun-synchronous contributions might end up in the sea level anomalies.
For mean sea surface computation it is important to include the sun-synchronous satellites ERS and Envisat as these satellites have denser ground-tracks and furthermore are the only satellites covering the high latitude regions between the 65 and 82 parallels. However, here the ERS mean profiles are normally fitted to the TOPEX profiles in order to minimize the striation (e.g., Andersen and Knudsen 2009). However striations might still be seen due to the use of ERS and Envisat data.
Fig. 5.29 illustrates a 6-year mean of the difference in state of the art ocean tide and inverse barometer corrections. These plots are “identical” to the plots shown in Fig. 5.28, but computed from ERS-2 rather than Jason-1.

The mean difference between the FES2004 and GOT4.7 ocean tide correction computed from 6 years of ERS-2 data (upper plot) and the mean difference between the inverse barometer correction and MOG2D_IB correction (lower plot ). Values are given in centimeters
Interesting global patterns of highs and lows are seen in both the difference between the applied tide models and difference in the applied dynamic atmosphere correction. Both correspond to aliasing of the S2 constituent. For the ocean tide the effect is most likely due to the difference in the amplitude of the S2 tide between the FES2004 and GOT4.7 ocean tide models.
For the dynamic atmosphere correction in the lower panel of Fig. 5.29, the cause is the fact that the S2 atmospheric tide is included in the MOG2D_IB correction, but not in the inverse barometer correction. Interested readers are referred to Rio and Andersen (2009) for a more detailed investigation of the subject.
It is important that users of satellite altimetry using particularly sea level anomalies (h sla) make sure that the suite of standard corrections applied to the MSS determination is identical to (or at least compatible with) those used to compute the altimetric anomalies. This is equally important in the open ocean and the coastal zone. Otherwise the differences between the applied correction models might contaminate the altimetric sea surface height signal. This is naturally more important for users of sun-synchronous data from ERS-1, ERS-2, and Envisat than for users of the TOPEX/Poseidon, Jason-1, and Jason-2 data.
5.13 Summary
Most range and geophysical corrections need special attention in proximity to the coast: either because the signal is much larger or the correction is less accurate in coastal regions.
The wet troposphere correction is complex and shows high temporal variations, with rapid variations in both time and space and therefore also needs careful attention in the coastal region. However, closer than 50 km to the coast, where the radiometer observations are expected to degrade, the radiometer correction still performs equally accurate to the ECMWF model. This is most likely due to the fact that the ECMWF model also degrades close to the coast where the correction changes rapidly and observations are lacking. Several approaches aim at improving the correction. One uses the Dynamically Linked Model (DLM) based on the dynamic combination of radiometer measurements, model data, and GPS/GNSS-derived path delay estimates. The second approach investigates the measured brightness temperatures in order to remove the contamination coming from the surrounding land, thereby improving the accuracy of the radiometer observations in the coastal zone.
The sea-state bias correction is related to the waveform shape and cannot be estimated close to the coast (<10 km) where changing waveforms prevent the estimation of significant wave height essential to derive the correction. Further away from the coast, the temporal variation of the SSB correction is only a few cm in most places and it is hard to determine if the parametric or non-parametric corrections are performing better in coastal regions.
The high-frequency extension to the inverse barometer correction using a time-stepping finite element model with high resolution in coastal regions showed large improvement in coastal regions like the North Sea and in the Yellow Sea where the improvement is more than 30% compared with the classical inverse barometer correction. However, also large regions in the Antarctic Circumpolar Current region benefited from using the MOG2D_IB model.
Tides are by far the largest contributor to sea level variations and the investigation stresses the importance of further improving ocean tide modelling in coastal regions. In the deep ocean, recent investigations showed that ocean tide models have an accuracy of around 1.4 cm (e.g., Bosch 2008). However, the global ocean tide models still have errors exceeding 10–20 cm close to the coast as also demonstrated by Ray (2008) in a comparison with coastal tide gauges. Particularly in shallow water regions, the largest accuracy gain in altimetric sea level determination is still expected to come from improvement of tidal models.
Altimetric sea level anomalies are determined by removing the mean sea surface from the sea surface height observations. When computing those anomalies, the same suite of range and geophysical corrections should be applied, as those used during the process of determining the mean sea surface. With the accuracy of current sea level observations, differences between the applied correction model used for the sea surface height and mean sea surface models might contaminate the altimetric sea level anomalies. This was shown to be more important for users of sun-synchronous data from ERS-1, ERS-2, and Envisat than for users of the TOPEX/Poseidon, Jason-1, and Jason-2 data.
If determined properly, the dry troposphere and ionosphere corrections are barely contaminated or degraded in coastal regions. When determined by dual-frequency altimeters, land in the altimeter footprint could contaminate the ionosphere correction, but when smoothed properly, this effect is negligible. The dry troposphere correction could suffer land effects only when it is erroneously based on surface pressure instead of sea level pressure grids.
Abbreviations
- AVISO:
-
Archiving, Validation and Interpretation of Satellite Oceanographic data
- BM4:
-
4-Parameter SSB model
- CLS:
-
Collecte Localisation Satellites
- DEOS:
-
Department for Earth Observation and space Systems
- DLM:
-
Dynamically Linked model
- DNSC:
-
Danish National Space Centre
- DORIS:
-
Doppler Orbitography and Radiopositioning Integrated by Satellite
- ECMWF:
-
European Centre for Medium-Range Weather Forecasts
- EGM:
-
Earth Gravity Model
- EM:
-
ElectroMagnetic
- ERS:
-
European Remote-sensing Satellite
- EUMETSAT:
-
European Organization for the Exploitation of Meteorological Satellites
- FES:
-
Finite Element Solution
- GFO:
-
Geosat follow-on
- GIM:
-
Global Ionosphere Map
- GOT:
-
Goddard Ocean Tide model
- GPS/GNSS:
-
Global Positioning System/Global Navigation Satellite System
- GRACE:
-
Gravity Recovery And Climate Experiment
- IB:
-
Inverse Barometer
- IGS:
-
International GPS Service for geodynamics
- IRI:
-
International Reference Ionosphere
- ITRF:
-
International Terrestrial Reference Frame
- JMR:
-
Jason-1 Microwave Radiometer
- JPL:
-
Jet Propulsion Laboratory
- MDT:
-
Mean Dynamic Topography
- MOG 2D:
-
Two-dimensional Gravity Waves model
- MSS:
-
Mean Sea Surface
- NCEP:
-
National Centers for Environmental Prediction
- NIC:
-
NOAA Ionosphere Climatology
- NOAA:
-
National Oceanic and Atmospheric Administration
- OSTST:
-
Ocean Surface Topography Science Team
- PO.DAAC:
-
Physical Oceanography Distributed Active Archiving Center
- QWG:
-
Quality Working Group
- RADS:
-
Radar Altimeter Database System (http://rads.tudelft.nl/)
- RMS:
-
Root Mean Square
- SLP:
-
Sea Level Pressure
- SSB:
-
Sea-State Bias
- SWH:
-
Significant Wave Height
- SWT:
-
TOPEX science Working Team
- TEC:
-
Total Electron Content
- TECU:
-
Total Electron Content Unit
- TMR:
-
TOPEX Microwave Radiometer
- TOPEX:
-
Topography EXperiment
References
Agnew D (1997) NLOADF: a program for computing ocean tide loading. J Geophys Res 102(B3):5109–5110
Andersen OB (1995) Global Ocean tides from ERS-1 and TOPEX/Poseidon altimetry. J Geophys Res 100(C12):25,249-25,260
Andersen OB, Knudsen P (2009) The DNSC08 mean sea surface and mean dynamic topography. J Geophys Res 114:C11001. doi:10.1029/2008JC005179
Andersen OB, Knudsen P, Trimmer R (2005) Improved high resolution gravity field mapping (the KMS02 global marine gravity field). In: Sanso F (ed) A window on the future of geodesy. IAG symposium, vol 128, pp 326–331
Andersen OB, Vest AL, Knudsen P (2006a) The KMS04 multi-mission mean sea surface. In: Knudsen P (ed) GOCINA: improving modelling of ocean transport and climate prediction in the North Atlantic region using GOCE gravimetry. Cahiers du Centre Européen de Géodynamique et de Séismologie, vol 25, pp 103–106, Luxembourg
Andersen OB, Egbert GD, Erofeeva SY, Ray RD (2006b) Mapping nonlinear shallow-water tides: a look at the past and future (Honorary symposium for C. Le Provost). Ocean Dyn 56:416–429
Berry PAM, Garlick JD, Freeman JA, Mathers EL (2005) Global inland water monitoring from multi-mission altimetry. Geophys Res Lett 32(16):L16401. doi:10.1029/2005GL022814
Bertiger W, Desai S, Dorsey A, Haines B, Harvey N, Kuang D, Lane C, Weiss J, Sibores A (2008) Jason-2, Precision orbit determination status, OSTST workshop, Nice, Nov 2008, http://www.aviso.oceanobs.com/fileadmin/documents/OSTST/2008/oral/bertiger.pdf
Bilitza D (2001) International reference ionosphere 2000. Radio Sci 36(2):261–275. doi:10.1029/2000RS002432
Bilitza D, Reinisch BW (2008) International reference ionosphere 2007: Improvements and new parameters. Adv Space Res 42(4):599–609. doi:10.1016/j.asr.2007.07.048
Bosch W (2008) EOT08a model performances near coasts. Presented at Second coastal altimetry Workshop, Pisa, Italy, 6–7 November 2008
Brown GS (1977) The average impulse response of a rough surface and its applications. IEEE Trans Antennas Propag AP-25(1):67–74
Brown S (2008) Novel near-land radiometer wet path delay retrieval algorithm: Application to the advanced microwave radiometer. Presented at Second coastal altimetry workshop, Pisa, Italy, 6–7 November 2008
Carrère L, Lyard F (2003) Modelling the barotropic response of the global ocean to atmospheric wind and pressure forcing – comparisons with observations. Geophys Res Lett 30(6):1275
Cartwright DE, Edden AC (1973) Corrected tables of tidal harmonics. Geophys J Royal Astron Soc 33:253–264
Cartwright DE, Taylor RJ (1971) New computations of the tide-generating potential. Geophys J Royal Astron Soc 23:45–74
Chelton DB (1994) The sea state bias in altimeter estimates of sea level from collinear analysis of TOPEX data. J Geophys Res 99(C12):24,995–25,008
Eymard L, Obligis E (2006) The altimetric wet troposphere correction: progress since the ERS-1 mission. In: Symposium 15 years of progress in satellite altimetry, Venice, Italy, 2006
Fenoglio-Marc L (2008) Retracking in the (NW) Mediterranean Sea. Presented at Second coastal altimetry workshop, Pisa, Italy, 6–7 November 2008
Fu LL, Cazenave A (2001) Satellite altimetry and earth sciences: a handbook of techniques and applications. Academic, San Diego, CA, 624pp
Fu LL, Christensen EJ, Yamaron CA, Lefebvre M, Ménard Y, Dorrer M, Escudier P (1994) TOPEX/Poseidon mission overview. J Geophys Res 99(C12):24,369–24,382
Fu LL, Stammer D, Leben D, Chelton R (2003) Improved spatial resolution of ocean surface topography from the T/P-Jason-1 altimeter mission. EOS Trans AGU 84(26):241–242
Fukumori J, Raghunathand R, Fu LL (1998) Nature of global large scale sea level variability in relation to atmospheric forcing: a modelling study. J Geophys Res 99:24369–24381
Gaspar P, Florens JP (1998) Estimation of the sea state bias in radar altimeter measurements of sea level: results from a new nonparametric method. J Geophys Res 103(C8):15803–15814
Gaspar P, Ogor F, Le Traon PY, Zanifé OZ (1994) Estimating the sea state bias of the TOPEX and Poseidon altimeters from crossover differences. J Geophys Res 99(C12):24981–24994
Goldhirsh J, Rowland JR (1992) A tutorial assessment of atmospheric height uncertainties for high-precision satellite altimeter missions to monitor ocean currents. IEEE Trans Geosci Remote Sensing 20:418–434
Hernandez F, Schaeffer P (2000) Altimetric mean sea surfaces and gravity anomaly maps inter-comparisons AVI-NT-011-5242-CLS. CLS Ramonville St Agne, France, 48pp
Iijima BA, Harris IL, Ho CM, Lindqwister UJ, Mannucci AJ, Pi X, Reyes MJ, Sparks LC, Wilson BD (1999) Automated daily process for global ionospheric total electron content maps and satellite ocean altimeter ionospheric calibration based on global positioning system data. J Atmos Solar-Terr Phys 61:1205–1218. doi:10.1016/S1364-6826(99)00067-X
Imel DA (1994) Evaluation of the dual-frequency ionosphere correction. J Geophys Res 99(C12):24895–24906
Keihm SJ, Zlotnicki V, Ruf CS (2000) TOPEX microwave radiometer performance evaluation, 1992–1998. IEEE Trans Geosci Remote Sensing 38(3):1379–1386
Komjathy A, Born GH (1999) GPS-based ionospheric corrections for single frequency radar altimetry. J Atmos Solar-Terr Phys 61(16):1197–1203. doi:10.1016/S1364-6826(99)00051-6
Komjathy A, Sparks L, Wilson BD, Mannucci AJ (2005) Automated daily processing of more than 1000 ground-based GPS receivers for studying intense ionospheric storms. Radio Sci 40:RS6006. doi:10.1029/2005RS003279
Labroue S, Gaspar P, Dorandeu J, Mertz F, Zanifé OZ (2006) Overview of the Improvements made on the empirical determination of the sea state bias correction. In: Symposium 15 years of progress in radar altimetry, Venice, Italy, 2006
Labroue S, Tran N, Vandermark D, Scharroo R, Feng H (2008) Sea state bias correction in coastal waters. In: Second coastal altimetry workshop, Pisa, Italy, 6–7 November 2008
Le Provost C, Genco ML, Lyard F, Vincent P, Canceil P (1994) Spectroscopy of the world ocean tides from a finite element hydrodynamic model. J Geophys Res 99(C12):24777–24,797
Llewellyn SK, Bent RB (1973) Documentation and description of the Bent ionospheric model. Rep. AFCRL-TR-73-0657. Air Force Cambridge Research Laboratory, Hanscom Air Force Base, Massachusetts
Loziers MS, McCarthy MS, Owens WB (1994) Anomalous anomalies in averaged hydrographic data. J Phys Oceanog 24:2624–2638
Loziers MS, Owens WB, Curry RG (1995) The climatology of the North Atlantic. Proc Oceanogr 36:1–44
Lyard F, Lefèvre F, Letellier T, Francis O (2006) Modelling the global ocean tides: modern insights from FES2004. Ocean Dyn 56(5–6):394–415. doi:10.1007/s10236-006-0086-x
McCarthy DD (1996) IERS Standards (1996) IERS Technical Note 21, Central Bureau of IERS, Observatoire de Paris, France
Naeije MC, Doornbos E, Mathers L, Scharroo R, Schrama EJO, Visser P (2002) RADSxx: exploitation and extension, NUSP-2 report 02-06, SRON/NIVR, Delft, the Netherlands
Obligis E, Desportes C, Eymard L, Fernandes J, Lazaro G, Nunes A (2009) Tropospheric corrections for coastal altimetry, ibid
Pascual A, Marcos M, Gomis D (2008) Comparing the sea level response to pressure and wind forcing of two barotropic models: validation with tide gauge and altimetry data. J Geophys Res 113:C07,011. doi:10.1029/2007JC004459
Pavlis NK, Holmes SA, Kenyon SC, Factor JK (2008) An Earth gravitational model to degree 2160: EGM2008. Presented at the 2008 General Assembly of the European Geosciences Union, Vienna, Austria, 13–18 April
Ponte RM, Gaspar P (1999) Regional analysis of the inverted barometer effect over the global ocean forced by barometric pressure. J Geophys Res 104(C7):15587–15602
Ray RD (2008) Tide corrections for shallow-water altimetry: a quick overview. Presented at Second coastal altimetry workshop, Pisa, Italy, 6–7 November 2008
Ray RD, Koblinsky CJ, Beckley BD (1991) On the effectiveness of Geosat altimeter corrections. Int J Remote Sensing 12:1979–1984
Ray RD, Egbert G, Erofeeva SY (2009) Tide prediction in shelf and shallow water; Status and prospects, ibid
Rio MH, Andersen O (2009) GOCE user toolbox – standards and recommended models. ESA publication. http://earth.esa.int/gut/, 70pp
Rio MH, Schaeffer P, Hernandez F, Lemoine JM (2005) The estimation of the ocean mean dynamic topography through the combination of altimetric data, in-situ measurements and Grace geoid: from global to regional studies. In: Proceedings of the GOCINA workshop in Luxemburg, 13–15 April 2005
Roblou L, Lyard F (2008) Tidal modelling in coastal and shelf seas: methodology and application to the Persian Gulf. Presented at Second coastal altimetry workshop, Pisa, Italy, 6–7 November 2008
Rodrigues E, Martin JM (1994) Estimation of the electromagnetic bias from retracked TOPEX data. J Geophys Res 99:24957–24969
Ruf CS (2002) Characterization and correction of a drift in calibration of the TOPEX microwave radiometer. IEEE Trans Geosci Remote Sens 40(2):509–511
Saastamoinen J (1972) Atmospheric corrections for the troposphere and stratosphere in radio ranging of satellites. In: Hendriksen SW, Mancini A, Chovitz BH (eds) The use of artificial satellites for geodesy. Geophysical Monograph Series 15:247–251, AGU, Washington, DC
Scharroo R, Lillibridge JL (2005) Non-parametric sea-state bias models and their relevance to sea level change studies. In: Lacoste H, Ouwehand L (eds) Proceedings of the 2004 Envisat & ERS symposium, European Space Agency Special Publication, ESA SP-572
Scharroo R, Smith WHF (2010) A GPS-based climatology for the total electron content in the ionosphere. J Geophys Res (in press)
Scherneck HG (1990) Loading Greens function for a continental shelf with a Q structure for the mantle and density constraints from the geoid. Bulletin d’Information des Marées Terrestres 108:7775–7792
Schrama EJO, Scharroo R, Naeije M (1997) Radar altimeter database system (RADS): towards a generic multi-satellite altimeter database system, Final Report. 88p. SRON/BCRS publication, USP-2 report 00-11, ISBN 90-54-11-319-7
Schreiner WS, Markin RE, Born GH (1997) Correction of single frequency altimeter measurements for ionosphere delay. IEEE Trans Geosci Remote Sensing 35(2):271–277. doi:10.1109/36.563266
Smith EK, Weintraub S (1953) The constants in the equation for atmospheric refractive index at radio frequencies. Proc IRE 41:1035–1037
Strub T (2008) Coastal altimeter evaluation of Jason-1 and Jason-2. Presented at OSTST meeting, Nice 2008
Wahr J (1985) Deformation of the Earth induced by polar motion. J Geophys Res 90(B11):9363–9368
Wahr J, Swenson S, Zlotnicki V, Velicogna I (2004) Time-variable gravity from GRACE: first results. Geophys Res Lett 31(L11):501. doi:10.1029/2004GL019779
Web1: JPL Global Ionosphere Model, http://iono.jpl.nasa.gov/gim.html
Wunsch C, Stammer D (1997) Atmospheric loading and the oceanic “inverted barometer” effect. Rev Geophys 35:79–107
Acknowledgment
The authors would like to acknowledge the space agencies for providing altimetric data. M.-H. Rio provided valuable input to the section on range corrections and mean sea surface determination as member of the GOCE User Toolbox development team. Several authors (i.e., Fenoglio-Marc, Eymard, and Pavlis) who provided figures are also acknowledged.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2011 Springer-Verlag Berlin Heidelberg
About this chapter
Cite this chapter
Andersen, O.B., Scharroo, R. (2011). Range and Geophysical Corrections in Coastal Regions: And Implications for Mean Sea Surface Determination. In: Vignudelli, S., Kostianoy, A., Cipollini, P., Benveniste, J. (eds) Coastal Altimetry. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-12796-0_5
Download citation
DOI: https://doi.org/10.1007/978-3-642-12796-0_5
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-12795-3
Online ISBN: 978-3-642-12796-0
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)