
Abstract
This chapter explains the types of information on the biophysical properties of seagrass and its surrounding environments, which are able to be measured, mapped, monitored and/or modelled using remote sensing techniques. This includes specifying the environmental conditions where these approaches do not work. “Remote sensing” refers to the use of a sensor not in direct contact with the target to measure one or more of its bio-geo-physical-chemical properties. This includes measurements from satellites, airborne , and remotely operated or autonomous above- and below-water systems. Six key topics are covered to show how remote sensing and its integration with ecological field survey methods, ecological theory and modelling, is an operational and accessible tool. Chapters 7, 9–11 in this book are complementary as they explain the biological and physiological bases of seagrasses and how they interact with light. The text is written from ecological perspective to explain “how to” implement remote sensing approaches at scales relevant to science and management problems. Specific details are presented for mapping and monitoring seagrass: extent, composition and biophysical properties from plant to rhizome and regional scales over 103 km2.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others

1 Introduction
Understanding how seagrass ecosystems change over time and space, provides the basis for developing and testing our knowledge of seagrass biology and ecology, and ultimately the development and assessment of seagrass management strategies. All forms of ecology and environmental management require data to be collected for seagrass properties over suitable areas and timescales —this chapter provides a basis for doing this using remote sensing. In this context remote sensing is any observation or measurement made at a distance from an object, and includes sensors in aircraft, drones, satellites and visual observations from aircraft and boats. The chapter aim is to explain and demonstrate the types of information, on the biophysical properties of seagrass and its surrounding environments, which are able to be measured, mapped, monitored and/or modelled, using remote sensing techniques. It also identifies the properties which cannot be mapped and measured, and the circumstances under which these data and approaches cannot be used, and field survey or modelling are required. An on-line and interactive version of this material for seagrasses can be found at: www.rsrc.org.au/rstoolkit.
In this context remote sensing refers to the use of a sensor not in direct contact with the target to measure one or more bio-geo-physical-chemical properties. The majority of applications presented are from satellite and airborne platforms , with a smaller set from above- or below-water UAV’s, instrumented buoys, and will include sensors carried by people in the field and used in the laboratory. The review does not cover acoustic sensors, and the reader is referred to Foster et al. (2013) to cover suitable material from coral reefs and seagrass.
Compared to terrestrial applications, a small, but comprehensive body of literature has already been published on the structural and physiological properties of seagrasses and their environments that can be measured using remote sensing techniques. Readers are referred to Larkum et al. (2006), specifically chapters by Zimmerman (2006), Zimmerman and Dekker (2006), Dekker et al. (2006) and other key references such as Kirk (1994) for more detail. Later summaries show how remote sensing mapping has developed focussed on mapping seagrass properties, rather than scaling up and mapping physiological and structural properties (Ferwerda et al. 2007; Hossain et al. 2015). Key concepts from these papers are used in this chapter to explain how to collect appropriately scaled remotely sensed data and process it to map and monitor specific bio-geo-physical-chemical properties. This will be done by using the following objectives to explain and demonstrate:
-
(1)
How seagrass properties [extent, composition, structure and function] are able to be “remotely sensed” from a variety of remote sensing instruments;
-
(2)
How seagrass properties are measured and mapped;
-
(3)
How seagrass properties are modelled;
-
(4)
How the environmental properties controlling seagrass extent and condition are mapped and modelled;
-
(5)
How seagrass properties are monitored over time; and
-
(6)
Current research directions—addressing limitations and new technologies and techniques.
We focus on the six topics listed above as remote sensing and its integration with ecological field survey methods, ecological theory and modelling, has now matured to a widely operational and accessible tool. Remote sensing has become essential for mapping, monitoring and modelling in most environments. However, we lack detailed resources on “how to” implement these approaches at spatial and temporal scales relevant to the scientific and management challenges in seagrass environments. This chapter provides fundamentals of seagrass remote sensing and the means to link the science and applications. Mapping and monitoring seagrass properties from plant to regional scales using field and image measurements is possible using more than one approach—but needs to be done the right way.
Previously published work on remote sensing of seagrass treated remote sensing as an exploratory tool and often presented it in a form that was difficult to access and use by those concerned with seagrass ecology and management. We now have the data and tools in forms that can be learnt and applied by a wide group of people.
2 Remote Sensing of Seagrass Environments—Why We Can Use Remote Sensing to Map, Measure and Monitor Seagrasses
Interactions of light and other forms of electromagnetic radiation (EMR), with the environment are the fundamental basis for collecting and analysing all remotely sensed data. Algorithms are applied to each pixel in an airborne- or satellite-images to convert measurements of absorbed and scattered light into biological, chemical and physical features. In this context, light, mainly sun-light, acts as the key component of the remote sensing process, as it is either absorbed, scattered or transmitted by the gas, liquid or solid it is interacting with (Fig. 15.1). Seagrasses and the environments they occur within, produce a range of light interactions which are controlled by their biological and physical attributes. The biological and physical attributes of seagrass that control these interactions are associated with their structure, chemistry and physiology, and are very well understood (see Chaps. 11–13 in this book) down to molecular levels. Our chapter builds on that understanding to explain and demonstrate how seagrass properties are able to be “remotely sensed” from airborne and satellite images to map and monitor seagrass properties at specific spatial and temporal scales. Our focus is mainly on optical or passive remote sensing systems which rely on sunlight as the source of EMR illuminating seagrasses and their environment.

Light interactions in a coastal—estuarine coral-reef and seagrass environment in coastal Viti Levu, Fiji, with a the top panel showing a true colour Quickbird -2 image with 2.4 m pixels and lower panel showing a cross-section of the imaged area, including the source(s) and interactions of light that control measurements of seagrasses made from remotely sensed data
The subject of light interactions with seagrass and its surrounding aquatic environment has been dealt with extensively at the scale of individual plants (Kirk 1994; Zimmerman 2006) and cellular and photosystem levels (Larkum et al. 2006). However, very few studies link this knowledge to mapping and monitoring. Previous seagrass remote sensing was driven by the availability of specific types of airborne and satellite image data, at specific spatial and temporal scales. This chapter links the understanding of light interactions from within plant or shoot (10−3 m2) to regional and national (106 km2) scales—for using remote sensing to map and monitor seagrass environments over these scales. However the mapping and monitoring approaches used do have physical limits, because this approach relies on measuring reflected light, so this creates a limitation on the places it can be used due to:
-
1.
depth of water
-
2.
clarity of water
-
3.
small and cryptic species.
This means that for a very large component of tropical Australia (particularly shallow sub-tidal coastal areas) remote sensing techniques may be of limited applicability where turbid water and small species lead to limited ability to reliably detect and map seagrasses. There are a range of alternative field based approaches to mapping and assessment in these cases that have been employed to successfully generate seagrass maps over a range of spatial scales .
-
Camera based tows in deep-water (Carter et al. 2016);
-
Rapid assessments of intertidal locations of small cryptic species—helicopter/free diving etc.
Seagrasses interact with sun-light in similar ways to terrestrial plants, however they have different leaf morphologies and canopy structures, as well as relative levels of photosynthetic and accessory pigments. In addition, for the majority of their life, they sit completely submerged in the water column, and are partially or fully exposed under some tidal conditions . There are also significant differences between and within seagrass species in terms of growth forms and function, that yield different physical structures and chemical compositions. These differences result in unique scattering and absorption signals, and hence their detection in airborne or satellite images is possible within a certain range of water depths, water column clarities and seagrass cover levels. As noted before, and in published literature (Green et al. 1996; Phinn et al. 2008), if seagrass are in locations with clear water >15 m deep, or where water clarity is reduced by suspended or dissolved materials, or at low cover levels (<20%) it is not likely to be able to be mapped from airborne or satellite remote sensing. By measuring these sun-light interactions, we can infer or measure properties of seagrass. This approach is scale specific and each of the scales and their controlling bio-chemical and structural properties is outlined in Table 15.1. It is also pertinent that aquatic radiative transfer is considered at this point as seagrasses sit in an aquatic medium that changes its content and scattering/absorption properties rapidly.
Previous works have defined in detail, down to canopy, stem architecture, leaf structure and photosystem level, how light interacts with seagrasses (Zimmerman 2006). This chapter explains how algorithms and approaches for mapping critical seagrass properties and monitoring changes over time work, so they can be used for science and management in an appropriate way.
There is no comprehensive overview of how seagrass properties can be mapped and monitored using remote sensing, with reviews only providing application examples (Dahdouh-Guebas 2002; Ferwerda et al. 2007; Green et al. 1996; Hossain et al. 2015) or details on the biophysical properties of light interaction (Larkum et al. 2006). To address this we take a holistic approach to explain how to map seagrass based on the interactions outlined above. Since the most recent assessment of the physical and biological basis for remote sensing for seagrass in Larkum et al. (2006), there has been significant progress in: (1) access to a range of publicly available satellite image and field data sets; (2) increasing the spatial and radiometric details of images; (3) accuracy and availability of algorithms for mapping the composition of seagrass environments and biophysical properties on very high spatial resolution and/or very long time series; (4) availability of algorithms for biophysical property estimation linked to the field data; (5) access to open-data, -software and on-line processing for image processing; and, (6) operational use of map products for management activities.
Taking this assessment as a building block and using the conceptual framework outlined in Table 15.1 to relate remotely sensed measurements to seagrass properties at specific scales, we aim to equip our readers with enough information to:
-
understand considerations for deciding whether to use or not use remote sensing;
-
interpret remotely sensed products for seagrass environments;
-
use remotely sensed products to map and/or monitor seagrass properties; and
-
assess maps of seagrass properties produced from airborne or satellite images to determine if they are correct, if they are accurate, and where they do and do not work.
3 Fundamentals: Sensors, Mapping and Validation
To understand how information is extracted from remote sensing data, we explain how the data are collected from a range of sensor types, then how these data are analyzed and verified to produce maps that allow the measurement and monitoring of seagrass properties. Three sections are used to explain this:
-
Sensor and Platforms Types and Dimensions
-
Information Extraction Approaches: Mapping and Modelling
-
Essential Fieldwork and Data
3.1 Sensors, Platforms Types and Dimensions
Remote sensing instruments and platforms used to map and monitor seagrass properties vary in multiple dimensions. A common division of these sensors is into passive and active technologies. For seagrass, passive sensors measure visible or thermal EMR reflected or emitted from a surface, such as seagrass leaves . Active instruments, such as radar (radio detection and ranging), lidar (light detection and ranging) and acoustic sensors, emit EMR that after reflection is returned to the sensor. Active systems measure both distance to a target/pixel and its reflectance.
Biophysical properties of seagrass are required at various levels of detail from individual shoot up to whole ecosystem level (Fig. 15.2; Table 15.1). At each hierarchical level seagrass properties interact differently with EMR due to their dominant structures, processes and chemical compositions evident at that spatial scale. . Selection of an appropriate image data set and processing algorithm should be matched to the spatial, spectral and temporal scale(s) of the feature(s) you are aiming to map (Fig. 15.2). These considerations include characteristics at spatial (leaf/patch/meadow), spectral or type of light (presence/absence/species), and, temporal (seasonal/annual) scales.

Specific scales of seagrass structures and processes in spatial and temporal contexts
The spatial characteristics of seagrasses which may be mapped are controlled by pixel size and scene extent, (Figs. 15.2c, 15.3; Table 15.1). Pixel size is commonly characterised as very high (<0.5 m), high (0.5–10 m), moderate (10–50 m) and low (50 m–km) spatial resolution. Depending on the acquisition platform, image scene extents can vary in size from several km2 to tens of thousands of km2.

Imaging sensors with increasing pixel sizes over coastal seagrass environments
Spectral characteristics of remote sensing data, relates to the location, number and width of bands along the electromagnetic spectrum . Here, multi-spectral imagery is comprised of <10 broad (>10 nm) bands, whilst hyper-spectral is characterized by >10 narrow (<10 nm) bands. Band placement and band width, especially the in visible range of the electromagnetic spectrum , are important considerations when attempting to differentiate submerged features such as seagrass. This requires careful choice of band location and width to maximize discrimination, but minimize the effects of the water column .
Temporal characteristics of a satellite’s orbit, i.e., time between over-passes, define the minimum revisit time of the remote sensing instrument to any given point on the earth’s surface and the time of day or night of image capture (Fig. 15.3). This can vary from hours for airborne sensors, to days, weeks, and years for satellites. Next to sensor type, temporal considerations when planning a seagrass remote sensing data acquisition need to include: tidal stage, solar and sensor geometry, sea state, water clarity , and phenology of the seagrass and other marine plants.
The choice of platform to map the biophysical properties of seagrass s is driven by the required spatial, temporal and spectral characteristics of properties to be measured. Most common platforms are satellite or airborne , with the latter including airplanes, helicopters, and Unmanned Automated Vehicles (UAV). On the ground or in-water, passive and active systems have also been used along with acoustic systems. Automated Underwater Vehicle (AUV) are increasingly being used in marine environments as well to acquire imagery of the seagrass habitat. UAV and airborne systems can be flown when required and conditions are suitable. For satellite sensors, publicly available moderate- to low- spatial resolution sensors capture data continuously on regular cycles from 1–16 days, while high spatial resolution satellites will only capture areas on request, but can repeat within 1–5 days.
The image data sets outlined above can be obtained from a range of public-access and commercial outlets for local sites to global scales. Satellite image data archives, with pixel sizes >20 m, including the Landsat series, SPOT and MODIS, are available at both global and national scales, in the form of un-processed images and biophysical map products. A regularly updated overview of these data and products, and links to download sites are presented in the Committee on Earth Observation Satellites Handbook (CEOS 2015) (www.eohandbook.com/). The major space agencies (NASA, ESA, JAXA) all maintain EO data viewers and portals to enable search, selection and download of these archives over set areas, with private companies also providing access to these data streams, e.g., Amazon. The most recent trend in remote sensing data processing is to access peta-byte scale on-line stores of these global image archives, and to process them on-line then download map products off-line. Examples include Google’s Earth Engine at a global scale, and the data cube concept at the national scale, such as Australia’s Geoscience Data Cube. Governments also maintain national aerial photo and image archives which can be accessed on-line. Private agencies, such as DigitalGlobe, maintain high spatial resolution (<5 m) satellite image archives, extending to the early 1990s, and collect new data on request for set fees and for use under licence (Fig. 15.4).

Platforms used to collect remotely sensed data to map and monitor seagrass and their surrounding habitats
3.2 Information Extraction Approaches: Mapping and Modelling
Once appropriate airborne , satellite or other image data have been obtained, moving towards extracting a map or a series of maps of seagrass properties requires three stages of data processing. The first two, image pre-processing or corrections, and information extraction, are outlined below. Information extraction can take one of two forms, producing maps of: (i) thematic (categorical) output (e.g., seagrass species), or (ii) quantitative output (e.g., seagrass height, biomass, percentage cover). The map validation or verification stage, to quantify the accuracy of the map products is then outlined in this Section.
Before any thematic or quantitative information is extracted from remote sensing imagery, pre-processing is required so that the image data is correctly positioned on the ground to allow integration with other data and that the pixel values accurately represent the amount of light being reflected or emitted from the water surface or seagrass (Dekker et al. 2005). Geometric corrections to produce georeferenced images are required when analysing a sequence of images of the same area over time and for linking field measurements (e.g., plots, transects or other measurements) to image data for mapping, validation and modelling . Commercial and open-source image processing or GIS software provide geometric correction utilities. Images can be purchased with or without these corrections, and the level of corrections applied is listed in the image meta-data files (Fig. 15.5).

Example of pre-processing and mapping project
Radiometric corrections are used to eliminate variations in pixel reflectance values or signatures produced by atmospheric conditions , different sun and sensor angles, and water surface and depth. This is required for the delivery of pixel reflectance values or signatures that accurately represent surface or sub-surface spectral-signatures at the time of image acquisition. This type of correction is essential if radiative transfer equations are used to transform the pixel value to a biophysical quantity, e.g., water depth or leaf area index , to distinguish features (e.g., seagrass species); and to examine changes over time. For a full description of these corrections readers are referred to Green et al. (1996), Hedley et al. (2005).
This includes three types of corrections—sun-glint, air-water interface and water depth. Sun-glint is direct specular reflectance from the water surface due to specific sun illumination and sensor viewing angles in relation to the water. These effects can be limited to waves at certain viewing angles, or in the worst case produce large hot-spot flares covering most of an image. This can be avoided by timing image acquisitions to reduce hotspots, or reduced after image acquisition (Hedley et al. 2005). The air-water interface affects light as it travels through the atmosphere-water boundary and this can be corrected using a physics-based (Brando and Dekker 2003) or an empirical (Andréfouët et al. 2003) algorithm. Water column or depth correction, requires estimating and then compensating for light absorption and scattering that occurs as sun-light illuminates and is then reflected from the sea-floor; it can be conducted using inverse radiative transfer methods (Brando and Dekker 2003) or by creating empirical depth invariant bands (Lyzenga 1978, 1981).
Thematic Data Products contain discrete categories (e.g., presence/absence, species type, and ranked or ordinal classes. e.g., seagrass cover 10–40%). Commonly used approaches are “pixel-based” or “object-based.” Pixel-based supervised or unsupervised classifications use multivariate clustering algorithms to group pixels with similar spectral signatures and provide them with a thematic or categorical label. Object based image analyses first segment the image into “objects” based on similar spectral and textural characteristics. Next each segment or object is assigned a label based on its spectral, textural, locational and biophysical properties (Blaschke et al. 2011). As with geometric and radiometric corrections commercial and open-source image processing or GIS software provide functionality to implement these classifications.
Quantitative Data Products have continuous interval or ratio level values (e.g., biomass, percentage cover, depth) and are derived from empirical, physical, or biological models. Empirical models develop a relationship between the spectral reflectance characteristics of a pixel and the relevant field measurement(s). Physical models derive continuous information based on inversion of the radiative transfer theory replicating the light path from the sun, via the atmosphere and water column and back to the remote sensing sensor. Physics-based approaches require the optical characteristics of the atmosphere and water column surrounding the seagrass environment, and spectral reflectance signatures characterising the features making up the seagrass environment (e.g., seagrass species, sediment types). This type of model has an advantage over empirical models in that it provides information on seagrass composition and abundance, as well as physical information (e.g., water depth and quality). Physics based models can be used to assess the ability to differentiate seagrass species under varying sensors or environmental conditions (Hedley et al. 2005; Mobley 1994).
Once you have a thematic (e.g., seagrass species composition) or quantitative (e.g., seagrass biomass) map and which may be produced repeatedly for the same area at different times, change in the spatial patterns and values of seagrass properties can be assessed. This is done by multi-temporal analysis approaches, which can examine the difference between maps on two or more successive dates. These approaches are becoming ever more feasible as satellite remote sensing image archives, such as that from the Landsat program (1972—present), are made accessible (Wulder et al. 2012). Temporal analysis of seagrass, requires careful consideration of other environmental variables when conducting analyses, e.g., the water column can vary in composition in time and space, as well as in depth due to tidal fluctuations. While it is not always possible, temporally-separated marine image sequences should consist of data acquired under similar conditions (e.g., tidal height, water clarity) (Roelfsema et al. 2013).
3.3 Essential Fieldwork and Field Data
Remote sensing for mapping, monitoring and modelling seagrass or other benthic environments requires information from the field for establishing the mapping process (calibration) and for checking the accuracy of its results (validation). Field data collection not only provides quantitative information for calibration and validation , it provides also qualitative information that increases the producer’s and user’s understanding of the composition and dynamics of the seagrass environment. “Smelling the seagrass” provides a crucial part of any seagrass mapping, monitoring or modelling program. Often this is also referred to as “ground truthing”, however we suggest this latter term not used as it is often taken to mean, that the measurements conducted in the field are 100% accurate (the “truth”), which is not the case. All of these measurements involve sampling at one level or another, hence “ground validation” is more preferable.
Ideally calibration and validation data sets are independent, to assure the validation process is considered un-biased from the calibration process. Calibration (training) data are integrated with the mapping and monitoring approach to create a map from the remote sensing imagery. Validation data are used to assess the errors and the accuracy of the output thematic or quantitative map products. Currently there is no remote sensing approach for mapping and monitoring seagrass habitat that does not require some type of field data (e.g., spectral bottom reflectance signatures, biomass). Similarly, validation always requires field data at some stage.
Requirements for integrating field and image data—Compatibility between the geo-locational data (projection, datum, coordinate system), thematic class types and mapped biophysical properties is critical if image and field based data are to be compared. Requirements firstly include reduction of spatial mis-registration errors, or spatial alignment, between field and image data; e.g., taking care that field data sets, spatial layers or remote sensing imagery are properly georeferenced to each other. The geo-locational data properties include a known coordinate system (e.g., Latitude and Longitude, or Easting and Northing) and geodetic datum or origin point (e.g., World Geodetic Datum 1984). Secondly, the field data require measurement units or thematic classes that are comparable with the final remote sensing products. For example seagrass cover in the field with a descriptive ranking (e.g., low, moderate, high) can only be compared to similar map data.
Field program design and requirements—Ideally the sampling design for field data collection will be statistically sound in terms of location(s) and number of sites, however it must also be logistically feasible, keeping in mind the available resources (Congalton and Green 1999). Sampling design includes specifying: sampling unit, sample distribution method and number of samples. The sample unit can be a point (e.g., along transect or spot checks) or area (e.g., pixel or group of pixels). The sample size is determined by the required accuracy of the final product. The sampling distribution within the study area is preferably random, although practically this is often challenging, and stratified and stratified random sampling can be used. From a remote sensing perspective sample locations and number of samples are directed from statistical sampling requirements to meet a certain error levels and locations chosen typically in a stratified process based on a visual assessment of groups of pixels that make up the remote sensing image.
Field data collection methods—A variety of field methods have been used to gather information characterising seagrass habitats for both empirical and analytic/deterministic approaches. Most empirical remote sensing based mapping approaches require information on seagrass species composition, abundance or biomass. This type of information has been gathered through different approaches ranging from spot checks, visual quadrat analysis, direct measurements of leaves, plants or plots or photo transects. These sampling units are applied to measure a number of properties: species type, %-cover, seagrass biomass cores, or leaf chemical content
Analytic remote sensing approaches require field data on the spectral absorbance, transmittance and reflectance characteristics of the water column and the features making up the seagrass habitat. This includes: water depth, attenuation and backscattering, total suspended solids, pigment concentration, and spectral reflectance of seagrass and algae species and bottom types.
Validation of the image-based maps—To assess the reliability of an image based seagrass property map, several methods can be used. They include: visual assessment of the patterns present, and calculating error and accuracy measures using validation data sets. Accuracy measures can be grouped into those used for measuring the agreement between reference data and mapped data for continuous maps (e.g., biomass) and thematic maps (e.g., seagrass communities) . Thematic maps are validated by creating an error matrix which describes the relationship between the map data and coinciding reference data (Congalton and Green 1999). The error matrix is used to calculate map error or accuracy measures (e.g., overall accuracy) and the individual thematic map category accuracy (e.g., user and producer accuracy) (Congalton and Green 1999). Continuous maps are validated using field data to calculate r2 or root mean square error between estimated and measured data values. To assess these accuracy measures in comparison to other map products it is important that detailed information on the validation process is provided for both products (Congalton and Green 1999).
4 Mapping Seagrass
To choose an appropriate data set and mapping approach it is important that the producer and the user of the seagrass map (data) set understand what property of seagrass needs to be mapped. The next step is to work together to establish a suitable data set and mapping method to apply and deliver the required map. A mapping needs table is a one way of linking the requirements to be included in a map, with the most appropriate data and mapping methods (Table 15.2). The table requires input on: intended purpose of the map; which seagrass property is to be mapped; the extent of the area to be mapped; the smallest feature to be included in the map (i.e., minimum mapping unit size); required thematic mapping accuracy or acceptable parameter error level; required time period(s) to be mapped; and characteristics of the area to be mapped. Maps of seagrass properties are typically collected to address one of three fundamental ecological and management related questions. We present these three questions below; and then explain how these are derived in the following sections:
-
Where is seagrass present?
-
Which seagrass species are there?
-
How much seagrass is there and what condition is it in?
-
How is seagrass condition changing over time?
4.1 Where Is Seagrass Present?
Understanding and management of seagrass as a part of coastal environments requires base knowledge of where it does and does not occur—as is common in most biogeographic studies. This requires mapping at meadow scales (Fig. 15.2) which can involve building on point or plot level measurements, and in some cases modelling, which is discussed in more detail as part of Sect. 15.5. Modelling is used more commonly to determine where seagrasses are most likely to occur and to fill in gaps where there are no field survey or suitable remotely sensed data due to water-depth or -clarity limitations.
Scale of mapping—Presence/absence maps are binary in form and show areas of seagrass or non-seagrass from local (km2) to national (104–106 km2) scales. These are not detailed benthic cover or habitat maps, however they can be derived from these more complex maps.
Basis for mapping (assumption of algorithms used)—From a purely airborne or satellite image approach, mapping presence/absence relies on the assumption that there is a significant difference between the spectral reflectance signatures of seagrass and non-seagrass areas. For large parts of northern Australia this may not be the case and alternative field based methods for mapping may be required where deep or turbid water and small and cryptic species mean that the utility of satellite based remote sensing is limited. In visual terms, this means that seagrass and non-seagrass areas are visible and have distinctly different colours, tones and textures . In terms of level of detail, it also assumes that seagrass occurs in homogenous patches that are significantly larger than the image pixel size and that the imaged area covers the area to be mapped.
Approach and algorithms—A progression of data sets and approaches are used for this mapping from simple to complex, using field data and aerial photography to multi- and hyper-spectral image data sets, with analysis from visual delineation, to interpolation of field data points, to image classification , and to image classification guided by field data.
At the least complex level, field data from point (e.g., drop camera images) samples with presence/absence observations collected with positional information can be plotted on existing maps or interpolated to produce a map showing the extent of each benthic cover type . If suitable aerial or satellite image data are available, and areas of seagrass and non-seagrass are known, standard visual image interpretation cues or keys can be applied to manually delineate the boundaries of seagrass using GIS or image processing software (Purkis and Roelfsema 2015).
Image classification techniques, also applied through GIS or image processing software , can be used to automate this process. The map producer first identifies training pixels on the image where seagrass occur, often guided by field data, and then the image classification algorithm identifies all other pixels in the image with similar spectral reflectance signatures to the target seagrass pixels. This approach can be improved by use of field data locations to help train the classifier, and the use of patterns or contextual information to refine the accuracy of the classification (Purkis and Roelfsema 2015).
4.2 Which Seagrasses Are There?
Mapping seagrass species or community composition is the next level of detail from seagrass presence/absence and uses the same base data sets and mapping approaches . In this context the output maps are no longer binary, but now contain thematic or categorical information about benthic cover type, e.g., seagrass species or commonly occurring species assemblages. This does require more complex image and field data be used in combination, along with more advanced image processing algorithms (Hossain et al. 2015; Phinn et al. 2008; Roelfsema et al. 2014). Modelling is also used to fill gaps where there are no field survey or suitable remotely sensed data due to water depth or clarity limitations. Many Australian seagrass species may appear to be quite similar from remote sensed data due to similar growth forms and separation may not be possible to species level for some using these techniques (e.g., Halodule uninervis, Zostera muelleri, Cymodocea rotundata). In these circumstances it may be more appropriate to rely on field based assessments if species change is an important question.
Scale of mapping—Maps showing individual seagrass species and commonly occurring seagrass species assemblages are typically produced over scales of site (102 m2) to sub-regional (103−104 km2) levels.
Basis for mapping (assumption of algorithms used)—Mapping seagrass species and community composition from airborne or satellite images assumes there are significant differences in spectral reflectance signatures or spatial patterns between the types of seagrass species and that seagrass species and/or assemblages occur in homogenous patches that are significantly larger than the image pixel size . As with presence/absence mapping, this means that patches of different seagrass species are assumed to have distinctly different colours, tones and textures , which is also indicated by their different signatures. Where this is not the case a higher reliance on field based methods for mapping may be required.
Approach and algorithms—Similar data sets and algorithms are used in this section as with presence/absence mapping, however in this context they need to be more refined. Starting at the least complex level, field data from point (e.g., drop camera) samples with dominant type of benthic cover or percentage cover observations per species, collected with positional information , can be collected and plotted on existing maps or interpolated to produce a map showing the extent of each benthic cover type . The seagrass species type or community composition classes can also be mapped by standard visual image interpretation cues or these keys also can be applied to manually delineate the boundaries of seagrass species using GIS or image processing software.
Image classification techniques, can be applied by the map producer first identifying training pixels on the image where certain seagrass species are known to occur, guided by field data, then the image classification algorithm identifies all other pixels in the image with similar spectral reflectance signatures to the target seagrass species pixels. This approach can be improved by use of field data locations to help train the classifier, and the use of patterns or contextual information to refine the accuracy of the classification (Purkis and Roelfsema 2015). Most recently species and community composition mapping has moved to object based image analysis, which enables delineation and identification of groups of pixels as seagrass species (Roelfsema et al. 2014). This approach uses similar cues to manual approaches, especially texture and context, that combine the characteristics of individual pixels or groups of pixels.
4.3 How Much Seagrass Is There and What Condition Is It in?
Once the extent of the seagrass environment and its composition is known, there is a need to move to quantitative data on the structure and function of seagrasses to inform science and management . These data are significantly different to the presence/absence and composition maps in that the pixel values contain estimated quantities and are numeric in form. These properties include structural dimensions, e.g., height, percentage cover, leaf area index , biomass, and functional attributes e.g., absorbed photosynthetically active radiation.
Scale of mapping—Algorithms for estimating these properties produce polygons or pixels containing interval or ratio level quantities representing an estimated value of a seagrass biophysical property, e.g., above-ground biomass. These are not ranked categorical or thematic values, they are real numbers, and are produced from site (m2) to sub-regional (103−104 km2) scales.
Basis for mapping (assumption of algorithm)—Spectral reflectance signatures of seagrass species are a record of the scattering and absorption of light by the seagrass, which are directly controlled by the seagrass’ physical structure, chemical composition and physiological state (Zimmerman 2006). Measured absorption or scattering can be inverted mathematically and used to estimate the seagrass biophysical property controlling it—for full details on this process see Zimmerman (2006), Kirk (1994). This approach requires seagrass species and/or assemblages to occur in homogenous patches that are significantly larger than the image pixel size , however sub-pixel analysis techniques, such as spectral-unmixing, can be used. In some cases the variation in spectral reflectance due to cover of seagrass can be used as a primary discriminating factor for per-pixel or object-based image classification to produce maps showing ranked classes in terms of “percentage seagrass cover” (Lyons et al. 2013; Roelfsema et al. 2013). For this detailed level of analysis it is even more critical that imagery can provide good a visual signature and differentiation of seagrass. This generally limits its applicability to shallow optical clear locations that contain seagrass community and species types that are relatively large and dense. For some smaller growing species and for locations where water depth and clarity limit this other field based approaches should be considered.
Approach and algorithms—A range of approaches are used to estimate these properties, from simple empirical regression models to complex deterministic numerical models, using field data with radiative transfer equations and multi- and hyper-spectral image data sets. In the context of empirical models, field measurements are often made of the seagrass property to be estimated, e.g., above-ground biomass, and these are either related to coincident field spectrometry of the sampled site, or coincident airborne and satellite image data. In either case the field spectrometer and coincident airborne and satellite image data provide at-target reflectance or absorbance measurements of sunlight in selected spectral bands from the location where seagrass property were measured, and can be used to build a regression model between one or more spectral band reflectance measurements and the seagrass property. The modelling results allow a regression equation to be applied to each pixel in an airborne or satellite image to estimate the seagrass property from the reflectance value. Ideally this process uses the same spectral bands and spatial sampling scale to build and apply the model, however this may not be possible.
A second approach for estimating these properties is to use radiative transfer models (Hedley et al. 2005), which estimate reflectance values from known plant structure and physiological parameters, in combination with airborne or satellite images. These models are often run to simulate airborne or satellite measured reflectance under a wide range solar and viewing geometries, water depths and clarities, canopy forms and plant conditions . The results then provide a (look-up) table of possible reflectance values and the seagrass and environmental properties that produced them, allowing the seagrass structure and physiological properties to be estimated for each pixel.
A third approach for estimating percentage cover and biomass does not provide numerical values, as noted above but uses per-pixel or object-based image classification to produce maps showing ranked classes in terms of “percentage seagrass cover or biomass” (Lyons et al. 2013; Roelfsema et al. 2013).
4.4 Considerations for Mapping and Monitoring Seagrass
For any desired seagrass map to be generated, the process requires image data to cover the area, and some expert knowledge of the area. The following section outlines critical considerations for all forms of seagrass mapping using the methods outlined in Sects. 15.4.1–15.4.3.
Mapping of large extents (>103 km2)—To create a meaningful map of a large extent is a logistical and physical challenge. Any large body of water has varying water clarity which varies spatially and temporally, due to tidal fluctuations and a range of other factors. The first stage is to assess what mapping method is appropriate for the species/habitat and water conditions—Can remote sensing actually be applied or will you need to rely on more ground based methodologies? The second stage of any mapping project for a large area is to ideally acquire cloud-free and appropriate spatial scale satellite imagery with predominantly clear water at low tide. Using this imagery and any available expert knowledge, potential seagrass locations can be identified.
Once potential locations are identified, a field campaign can be designed to sample a suitable number of locations with seagrass, or at across a range of species types, coverage and biomass levels. The most efficient way to achieve this is to perform spot checks from a boat using waypoints created from the locations identified on the satellite imagery. Spot checks can be done by either a snorkeler, or by drop camera in unsafe waters. As sample locations are visited the snorkeler enters the water and the presence of seagrass, with an estimation of percent cover of the substrate, can be recorded along with its location and depth. It is also useful to record the seagrass species present if known. Photographs taken underwater at each site provide a georeferenced archive which can be used to check other field observations. One caveat for this approach is that snorkeler spot checks are highly dependent on water depth, clarity and the safety of the personnel. In waters deeper than about 3 m, shallow turbid waters, or waters that are known to be unsafe, a drop camera should be employed. In shallow inter-tidal areas with potentially harmful marine life (e.g., crocodiles, sharks, jellyfish) helicopters have also been used to conduct spot check surveys and collect information required at low tide.
Mapping of smaller extents (<103 km2)—If the area to be mapped is relatively small and requires repeat monitoring , spot check or snorkel transects may be used to collect field data If the area is a shallow, coastal area with clear waters, transect data are preferred, from a logistical point of view, however randomised replicates are better than transects in small sites? In this case a snorkeler enters the water and swims from point A to point B taking photographs of the benthos at regular intervals. These photographs can be georeferenced if the snorkeler tows a GPS. On completion of the field campaign, the photographs can be analysed for seagrass presence/absence , percent cover, or species present. Again, snorkeler acquisition of field data must only be undertaken with complete regard to the operational health and safety of the personnel.
-
Challenges for mapping seagrass presence and absence using spot check field data
As for all marine remote sensing applications, mapping the benthos is dependent upon the ability to view the substrate or features you are trying to map on a satellite image. Light is attenuated by water and its constituents, such as sediments, dissolved organic matter, and phytoplankton . Light attenuation makes benthic features in satellite images less visible. Hence, it is generally only possible to accurately map seagrass in areas that are shallow where the waters are clear where seagrass can be differentiated from other bottom types. Seagrass can be mapped in more turbid waters, but the accuracy of these maps is much lower (Roelfsema et al. 2013).
Not only can light availability restrict the ability to map seagrass, but at depth, other benthic features such as algae and coral, may possess similar spectral signatures to seagrasses and look very similar on the satellite image. In this case, maps of seagrass may be rendered less accurate by the inclusion of areas of algae and coral. Acquisition of further spot check data for confirmation of the benthic habitat present can reduce this problem. However it may mean that mapping of seagrass may need to consider to what extent field data can be used to improve mapping, or if only field survey can be done, what is the limited area it can cover. It is important for the end user that any map generated is accompanied by a list of caveats as well as the calculated accuracy of the mapped areas, and a map showing the reliability of field and mapping data.
Some seagrass species differ significantly in their structural form (e.g., leave, strap, cylindrical), cell structure and pigment content, resulting in significantly different spectral signatures , and visually distinct patterns between species (Fyfe 2003). However this may not be the case for all seagrass species, particular some of the tropical species where many may have similar sized strap bladed features, meaning they may be difficult to differentiate. The differences between signatures is also reduced by the effects of epiphytic growth, water depth, water clarity and substrate colour (Fyfe 2003). Figure 15.6 shows the results from a simulation of seagrass and algae species spectral reflectance under an increasing range of water depths, with the overall separation between targets decreasing as water depth increases.

Modelled seagrass and benthic cover type bottom-spectral reflectance signatures with increasing water depth using optical properties from a clear coastal embayment in eastern Australia. The top left panel shows the exposed spectral reflectance based on field spectrometer measurement of seagrass above the water. The other panels show the modelled at-surface reflectance in the multi-spectral bands of the MERIS sensor, with increasing amounts of water depth
Spectral reflectance signatures are often derived using field based measurements 1–10 cm from the subject, so that the field of view of the sensor covers a homogenous part of the subject. Airborne and satellite sensors used for seagrass mapping have pixel sizes 0.1–30 m in size. As explained in Sect. 15.3, for seagrass to be mapped using this approach the seagrass properties must be homogeneous at scales larger than the pixel sizes. Accuracy of mapping is also helped by having more spectral bands, hence hyperspectral imagery is considered more suitable for pixel based approaches. More recently, semi-automated approaches have been developed as well for improving mapping accuracy using high spatial resolution multi spectral imagery (Roelfsema et al. 2014) (Figs. 15.7 and 15.8).

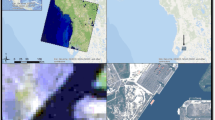
Seagrass species maps to 3.0 m depth for the Eastern Banks derived from a, c hyperspectral CASI-2 image (4 m × 4 m pixel size); and b multi spectral Quickbird-2 image (2.4 m × 2.4 m pixel size). The seagrass species mapping approach was based for a and b based on supervised classification, and c inverse physics based approach. Seagrass species: Ho—Halophila ovalis, Hs—Halophila spinulosa , Zm—Zostera muelleri, Cs—Cymodocea serrulata and Si—Syringodium isoetifolium (Phinn et al. 2008)

Seagrass species maps derived using semi-automated object based analysis approach applied to multi spectral imagery with various pixel sizes: ZY3 (5 m × 5 m pixel size) (a), Worldview 2 (2 m × 2 m pixel size) (b) and Landsat 8 OLI (30 m × 30 m pixel size) (c)
5 Modelling and Monitoring Seagrass
Seagrasses occur in highly dynamic coastal environments, with their distribution and condition being controlled by a range of environmental factors. This section provides a conceptual basis for using remote sensing to map, monitor and model variability in the seagrass properties discussed in the previous section (presence/absence, type and percentage cover). Concepts from landscape ecology are first used to define seagrasses as seascapes. This provides the basis for outlining multi-temporal analysis techniques to map changes in seagrass, followed by an outline of how seagrass properties and their controlling processes can be modelled.
5.1 Seagrasses as Dynamic Seascapes
Seagrass growth dynamics for a given area are driven, in general, by two main factors: seagrass plant properties (physiology and metabolism) and external environmental properties. However in a given area, properties of these two factors can vary spatially and temporally. Thus to understand the mechanism of seagrass distribution changes as a whole, a given study area can be viewed as a “seascape”. Seascape is defined similarly to the term “landscape” in landscape ecology, but applied in a marine environment context. Farina (1998) defined landscape ecology as the understanding of the mechanism driving change in landscapes with particular focus on the role of spatial arrangements of pattern and processes. Viewing seagrass areas as seascapes enables understanding the mechanism of change in a seagrass seascape as driven by the spatial arrangement of relevant pattern and processes for both plant properties and the external environment properties. This requires a thorough understanding and measurement of the relevant environmental processes as well as the seagrass measurements.
Deriving a seagrass seascape structure—In understanding the spatial and temporal forms of seagrass dynamics , it is helpful to consider it as part of a seascape, in the same way that terrestrial vegetation is part of a landscape. Using the organizational structure of seagrass in the seascape, the basic elements are the following: shoot (also called as clone), patch, meadow (Larkum et al. 2006) (Fig. 15.2). The shoot is the basic unit which has an apical rhizome meristem from which new shoots may develop. Several shoots which are physiologically connected together sharing the same shoot origin is called a “ramet” (Bearlin et al. 1999). The “patch” level originated from landscape ecology studies and is defined as a spatially contiguous group of features sharing a common mapping category (Turner et al. 2001). Similarly the term “bed” is also defined as a spatially contiguous area of seagrass area but the mapping category shared is percentage cover (Robbins and Bell 1994; Lathrop et al. 2006). Meadow in general refers to a study area as a whole but in a spatial context, may be defined as a spatially contiguous seagrass area of varying seagrass percentage cover composition (Lathrop et al. 2006; Robbins and Bell 1994). The following spatial scale associations were set: shoot (centimetre to metre scales), patch level (meter to hundred meter scales) and meadow (hundred meters to kilometres scales).
Taking the three basic seagrass seascape elements and the spatial scale associations, a conceptual model of seagrass seascape structure was created (Fig. 15.2). This model presents the seascape as multilevel, with each level associated to a spatial scale . It also extends beyond the meadow level to represent larger spatial extents, adding the regional meadow level and the ecosystem level. One strength of viewing the seagrass seascape using this model is that it acknowledges: (1) different mechanisms of change may exist at each level; and (2) changes in a level may influence other levels. Obvious linkages are also revealed, as each level is comprised of several “units” from a lower level. For example, the regional meadows level is comprised of individual meadows, meadow level is comprised of patches and patch level is comprised of shoots.
Seascape physiology and metabolism: Growth at different spatial scales—Now that a basic seascape structure has been created, understanding changes in the seascape requires: (1) assessing and analysing what drives the changes occurring at each level and/or across levels for a target seagrass variable or property; and (2) determining the linkage between levels. This leads to a hierarchical approach for understanding seascape change. This approach has been applied successfully in terrestrial environments for linking information at different scale/levels (Wu 1999).
Seascape biological dynamics: Scaling and mapping—Studies on seagrass dynamics have focused on either shoot, patch or a meadow covering a range of spatial scales (Figs. 15.9 and 15.10). Viewing seagrass as seascapes means that current knowledge of seagrass dynamics such as spatiotemporal growth need to be put in a seascape context. Placing these in a seascape context requires the process of scaling.

Hierarchy of scaling concepts showing the different scale characteristics (Figure taken from Wu et al. (2006)

The temporal and spatial extent of 14 seagrass modelling papers (as individual rectangles), showing limited efforts at meadow to ecosystem scales (Note: atemporal—only modelled spatial variability). The numbers in boxes refer to specific published papers—see Appendix 1
Scaling can be defined as the process of estimating a biophysical variable, ranging from structural (biomass, shoot density , percentage cover) to physiological (photosynthesis, primary production), from the spatial scale of the original measurement to a larger spatial scale. The main challenge in this area now centres on how to account/integrate the contribution of spatial heterogeneity (Turner et al. 2001). The components of the scaling process involve assessing scale characteristics of the scaling problem which comprises of the dimension, kinds and components of scale as shown in (Wu et al. 2006).
-
Examples of scaling:
The scaling process can be divided into two approaches: (1) assume homogeneity (no spatial variation); and (2) assume and incorporate heterogeneity or spatial variation. For example, if total seagrass biomass for a particular seagrass area was to be estimated from field measurements.
The scaling procedure can be applied as follows:
Using the first approach (assume homogeneity), biomass sample measurements can then be taken anywhere within the area to generate an average seagrass biomass per unit area. This “average seagrass biomass per unit area” can then be multiplied to the total seagrass area to produce the total seagrass biomass of the target seagrass area.
Using the second approach (incorporate heterogeneity), the driver(s) of biomass spatial variability need(s) to be identified. Alternatively, another approach is to have enough measurements over the area and through time to provide a reliable estimate of the degree of heterogeneity/spatial variability. Once the driver of spatial variability is identified (i.e., percent cover), biomass sample measurements can then be done for each percent cover level (or range/class). In addition, the amount of seagrass area for each percent cover level or range/class must be determined. Finally the total biomass can be determined as a cumulative sum of the biomass estimated for each percent cover level or range/class. Where biomass for each cover level or class was derived by multiplying the “cover level specific average seagrass biomass per unit area” with the “corresponding cover level seagrass area”.
Such examples of scaling biomass from original scale to target scale is rather a simple one, but the point is, that in most cases, spatial variability exist at all spatial scales. So the first scaling approach (assume homogeneity) in scaling is good as a rough or initial estimate that need to be followed by a robust estimate that incorporates spatial heterogeneity. On the other hand, the second approach (which incorporates spatial heterogeneity) may lead to multiple drivers and so the amount of heterogeneity incorporated will depend on the purpose of the estimate.
The approach we have presented above is necessarily simplistic. In reality a good understanding of the spatial (and temporal) variability (or heterogeneity) of the particular seagrass feature being assessed is required to determine the appropriateness of scaling up sub-sampled data to larger spatial scales . It will inform the number of sub-samples required to do this reliably and the most appropriate method of obtaining these -random spots throughout or clustered transect data and how many of each for example. We should also note this will not necessarily be the same for all seagrass meadows/landscapes/species/locations. The assumption of homogeneity is also problematic for many seagrass landscapes in Australia—it may well work reasonably for some species and meadows but there are many examples of very large seagrass areas the lack homogeneity and this approach may not be applicable.
5.2 Mapping and Monitoring Seagrass Dynamics
Remote sensing methods offer a unique opportunity to measure, map and monitor the spatial and temporal dynamics of seagrass ecosystems at a range of scales, but there are several key interactions to be considered between the technology, methodology and biophysical information one wishes to observe. Moreover, there are logistic and financial challenges that may limit monitoring ability at certain spatial and temporal resolutions (Roelfsema et al. 2013). In this section we first broadly classify the types of biophysical information that can be monitored as a function of spatial and temporal monitoring requirements, and the requirements for conducting reliable and accurate assessments of changes in seagrass properties over time (Tables 15.3 and 15.4). We note while that much of this section may apply to change detection over a two to three dates of seagrass maps, monitoring seagrass dynamics typically requires a time series of at least five maps (Lyons et al. 2013; Roelfsema et al. 2014).
Extent is the most simple seagrass property to map, and naturally has the oldest records of maps derived from remote sensing techniques in Moreton Bay (Hyland et al. 1989; Young and Kirkman 1975). However, this ease of mapping typically results in these records being derived from a range of image sources and mapping methodologies. For example even in Moreton Bay, one of the most extensively mapped seagrass regions in the world (Dennison and Abal 1999; Hyland et al. 1989; Roelfsema et al. 2009, 2014; Young and Kirkman 1975), the time series of seagrass extent maps was not reliable enough for a quantitative assessment of change (Roelfsema et al. 2014). This was due to irreconcilable differences in survey techniques and mapping methods. In smaller study areas however (e.g., Eastern Banks—Lyons et al. 2013; Roelfsema et al. 2014), quantitative assessment was possible for seagrass time series derived using equivalent mapping methods (Fig. 15.11). Chapter 9 on Seagrass seascape dynamics presents a case study applying remote sensing change detection techniques to Moreton Bay, Queensland Australia.

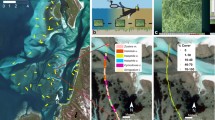
Data used to model seagrass presence versus absence in Moreton Bay, Southeast Queensland , Australia. a Seagrass versus non-seagrass marine habitats (Roelfsema et al. 2009). b Suitable (sand, mud) versus unsuitable (rock, coral) substrate (from former DERM, now DSITIA). c Digital terrain model (+1 to −40 m shown). d Water clarity: secchi depth (m), modelled using data obtained from sampling sites indicated by points (see Table S1). e Significant wave height (Callaghan et al. 2015). f Presence of impervious surfaces at 30 m resolution derived from landsat imagery in Moreton Bay, Southeast Queensland, derived from Lyons et al. (2011). [Quoted directly from Saunders et al. (2013)]
5.3 Mapping Physical Factors Influencing Seagrass Dynamics
The previous section discussed two options for scaling up seagrass distribution outside of sampled areas. The second of these methods requires data on the spatial variability in abiotic and biotic variables. This is possible because the distribution of seagrass habitats is determined by abiotic and biotic factors. Creating predictive maps of seagrass distribution using models therefore requires knowledge of the spatial distribution of those factors. This section focuses on how maps of some of the physical factors influencing seagrass are generated. Biotic factors such as competition or disease also influence seagrass distribution but are not the focus of this section.
Physical environmental data are very important for modelling seagrass distribution , abundance and function. Water depth, water clarity , photic depth, water temperature, currents, waves, and tidal range all influence seagrass properties (Adams et al. 2015; Callaghan et al. 2015; Carr et al. 2010, 2011, 2012; Grech and Coles 2010; Koch 2001; Koch et al. 2006; Saunders et al. 2013, 2014). Minimum water depth for seagrass occurrence is primarily determined by wave orbital velocity, tide and wave energy producing exposure related stress, whereas maximum depth is determined by light availability (de Boer 2007). For spatial models of seagrass distribution to be produced spatial data sets of physical environmental data are typically required. The types of data required are context dependent, and will vary based on the spatial scale of the study, environmental setting, and purpose of the model. A first step in the modelling process is identifying the most important physical environmental data for the scope of the study identifying biases which may be introduced by omitting other factors.
Spatial variability can be dealt with by setting spatial resolution and extent to that of the coarsest resolution and smallest range of the data available, or by making estimates of unknown values in un-sampled regions using models. Physical environmental data vary spatially and temporally in the coastal zone.
Where large data sets are required, for practical purposes, decisions must be made about reducing data sets to a size which is tractable, yet still represents the spatial and temporal variability in environmental data in a meaningful sense.
Ideally, environmental data would be available for each location for which seagrass presence or abundance were being modelled (Fig. 15.11). However, in reality this is often not the case, particularly for large or remote study areas. Alternatively, input data for models of seagrass distribution may be either measured at point locations and extrapolated to un-sampled locations if necessary, or modelled. The following sections give examples of how data sets for some of the important variables influencing seagrass distribution have been derived.
Bathymetry—Water depth influences seagrass distribution primarily by affecting the availability of light on the seafloor and the influence of waves and tidal currents on the benthos. Maps of bathymetry can be obtained from bathymetric charts, which are typically derived from ship soundings (Beaman 2010), or by remote sensing imagery informed by field data (Leon 2012).
Water clarity —Water clarity can be estimated from remote sensing imagery in optically deep water (that is, in locations where the satellite cannot “see” the bottom). However, seagrass can only live in optically shallow water where light is sufficient to support photosynthesis. Therefore, remote sensing is not typically used for deriving maps of water clarity in regions occupied by seagrass (Phinn et al. 2005). Instead, data for water clarity is obtained from field sampling. In Moreton Bay, QLD, secchi depth was based on field data obtained at point locations sampled monthly in July 2003-2004 from the Ecosystem Health Monitoring Program (EHMP) (Adams et al. 2015; Callaghan et al. 2015; Saunders et al. 2013). The point data for water clarity were extrapolated to un-sampled locations using a simple linear model based on distance to rivers (a source of turbid water) and open ocean (a source of clear water) (Saunders et al. 2013).
Benthic light availability—Benthic light availability is a function of water clarity, water depth, and surface irradiance. Given data on water depth and water clarity, benthic light availability can be calculated as a percentage of the light available at the surface. In general seagrass require 10% of surface light (Duarte 1991) although some species can survive with less and this requirement is now known to vary significantly between species (Collier et al. 2012). It can also be measured in situ using PAR loggers as light reaching the seagrass canopy.
Temporal variability in benthic light availability has been simplified to model seagrass distribution by averaging over monthly or annual time scales (Saunders et al. 2013, 2014). However this method could omit important information, such as the duration of time that low light conditions affect plants. Several authors (Adams et al. 2015; O’Brien et al. 2011) addressed this issue by deriving and testing the explanatory power of multiple indicators for the light affecting seagrass plants. These indicators included mean annual benthic light dose at the seabed, mean annual light penetration, the number of months in the year with mean benthic light dose less than 10, 15 or 20% of the mean annual surface light dose, and the number of months with light penetration less than 10, 15 or 20%. Each variable was then used in independent species distribution models of seagrass presence, and the best performing variable was selected based on Akaike Information Criterion (AIC).
Water temperature—Seawater temperature affects the community structure of seagrass habitats . Seawater temperature is measured in situ using temperature logging instruments moored at point locations, instruments located on moving objects such as vessels, or from satellite imagery using remote sensing. The latter can only measure the temperature at the sea surface, which may vary significantly compared to temperature at depth. Maps of seawater temperature may also be derived from oceanographic models . For a model of seagrass distribution in the Great Barrier Reef, mean sea surface temperature in the Australian region were obtained from the Australian Commonwealth Scientific and Research Organisation (Grech and Coles 2010).
Currents and wave—Waves and currents are measured at point locations in coastal areas using wave buoys and current meters. These instruments are costly and in most instances only have limited spatial coverage. Maps of wave heights and currents may be derived from oceanographic models . In Moreton Bay QLD, and at Lizard Island QLD, wave heights were modelled using the Simulating WAves Nearshore (SWAN model) (Callaghan et al. 2015). Similarly, March et al. (2013) used a wave model to generate data for wave orbital velocity, significant wave height, and peak period, which were used to model Posidonia oceanica distribution at Palma Bay, NW Mediterranean. However, such relatively complex process based wave models are not always accessible to ecologists. Simpler “fetch-based” approaches to generating maps of wave properties can be used, albeit with limitations (Callaghan et al. 2015).
Tidal range—Tidal range affects the distribution of seagrass over relatively large scales, such as over the extent of the Great Barrier Reef (Grech and Coles 2010). Tidal range data may be obtained from published maps. For instance, tidal range data from Hopley et al. (2007) were used to model seagrass presence or absence in the Great Barrier Reef by Grech and Coles (2010).
Substrate type and sediment composition—Most seagrass species require soft sediment substrates (with the exception of the surfgrasses, Phyllospadix spp. and Thalassodendron cilliatum—tropical Australian species that can grow on rocks/reefs directly) with a preference for medium grained sediments. Maps of substrate type and sediment composition are derived by remote sensing, echo-sounding, or by analysing sediments from sediment grabs or cores. In Moreton Bay Australia, a map of mud concentration (% mud) was derived by interpolating among data points obtained from sediment cores (Adams et al. 2015). Based on this map, maps of the time for 50 and 90% of sediment to settle over a depth of one metre were derived.
6 Monitoring and Managing Seagrass?
Seagrass habitats globally are threatened by anthropogenic and natural impacts necessitating active monitoring and management (Orth et al. 2006; Waycott et al. 2009). Mapping the distribution of key habitat forming species is often one of the first priorities for monitoring programs to ensure that informed ecosystem based management decisions are made (Cogan et al. 2009). Habitat mapping via remote sensing is important for environmental management as it has the potential to provide data at spatial and temporal scales that are relevant for management, and enables field based measurements to be extended over larger areas and longer time periods (Stevens and Connolly 2004). For habitat mapping to be successfully integrated into environmental decision-making, however, it needs to be available to practitioners in a useable context, in terms of data form and supporting information, that provides relevant information to understand the variability of a system (Benson and Garmestani 2011).
Environmental managers are beginning to account for ecological complexity into management planning strategies, with the understanding that ecosystems are rarely in a state of equilibrium, rather they are complex systems that vary with changing internal and external pressures (Gunderson et al. 2009). As this understanding grows, the habitat mapping technologies based on for instance remote sensing must grow with it in order to continue to deliver information relevant for decision-making.
6.1 Requirements for Remote Sensing to Be Used by Seagrass Managers
The increase in accessibility of high spatial resolution imagery and free satellite imagery has increased our ability to create seagrass habitat maps at various spatial scales and extents (Roelfsema et al. 2013). However, it remains important that a clear understanding of what this imagery is capable of delivering and its limitations accompanies attempts at mapping and monitoring assessments and that appropriate methods for the physical and biological nature of the seagrass communities are applied. It is now no longer enough, however, to provide maps that solely describe the extent of seagrass. This is largely because the prevention the loss of seagrass at the landscape scale requires managers to track additional indicators that provide prior warning of that loss (van der Heide et al. 2008). By the time that seagrass decline is depicted in habitat mapping products at the landscape scale, it is often too late to respond (Hughes et al. 2010). Additionally, with an increase in the understanding of the stressors on seagrass meadows, managers now require habitat maps that allow them to decipher trends in seagrass condition and to correlate that condition with variation in stressors at the same spatial and temporal scale. Managers often have two key requirements: (1) to identify seagrass areas at most risk and therefore greater need for protection; and (2) to identify the effectiveness of the management actions taken to protect or restore meadows. As such seagrass distribution (extent and composition maps) is only one of the information types that managers now require from remotely sensed seagrass habitat maps. Recent improvements in remote sensing capabilities have begun to allow the development of the additional elements required for managers to better understand the variability of their system.
6.2 Mapping at Scales Relevant to Management
The biophysical properties of seagrass meadows have been well studied at the cellular, physiological, morphological and meadow scales, however there has been limited demonstration linking the temporal dynamics of biophysical characteristics at those scales to temporal changes at the sea/landscape scale (Kendrick et al. 2005). Longer term datasets (>10 years) based on plot or transect measurements, often lack the coverage in terms of spatial extent required to make broader scale (km2 seagrass meadow and above, Fig. 15.2) assessments of seagrass dynamics (Lyons et al. 2013). Providing detailed information at relevant spatial or temporal scales has always been a limiting factor for seagrass management). In many monitoring programs there exists a juxtaposition between the requirements for very detailed information at fine resolution (e.g., patch—meadow scales Fig. 15.2) for location scale planning across very large spatial extents (ecosystem scale, Fig. 15.2) despite very minimal financial resources. These requirements have become prerequisites for managers in the course of planning and maintaining coastal infrastructure (e.g., harbours, piers, coastal protection, dredging of waterways) while still ensuring the conservation of regional ecosystem function and values. While concepts of landscape ecology are becoming more widely used and tested in seagrass empirical studies (Boström et al. 2006), baseline, longer term datasets describing the patchiness or fragmentation have been elusive.
Recent techniques like object-based analysis have proved useful in providing large spatial scale assessments with finer resolution (Lyons et al. 2012). Applying these sorts of techniques to coarse proxies for seagrass condition like percent cover has provided managers with a greater understanding of temporal seagrass dynamics at larger spatial scales.
6.3 Requirements for Understanding Processes
Remote sensing can provide managers with a better understanding of how naturally transitory seagrass meadows compare to more enduring meadows. Transitory meadows are not persistent over time; with periods of seagrass absence interspersed with periods of seagrass presence . Well-known examples of transitory seagrass ecosystems are seasonal meadows that develop from the seed bank , grow, flower and die each year, and they are meadows that do not lend themselves to using remotely sensed satellite or airborne imagery analysis, including small Halophila species and/or deepwater species (Kenworthy 2000; Meling-López and Ibarra-Obando 1999). The difficulty for managers is to separate meadows that are naturally transitory from those that fluctuate in response to fluctuations in stressors. Understanding how changes in stressor levels correlate to the fluctuations of meadow condition requires the provision of data at the same spatial and temporal scales.
7 The Challenges and Future for Seagrass Remote Sensing
The earlier sections of this chapter demonstrate operational methods for choosing and combining field and remotely sensed data to map and monitor seagrass environments at a range of specific scales and for deriving specific map products that are directly relevant to scientific and management questions. There are still a number of challenges to be addressed, partly in relation to advances in our capabilities to acquire and process data. The following section outlines the main challenges and potential directions for addressing these.
There are four main challenges which we will continue to address in using remote sensing to map seagrass environments:
-
(1)
Selecting the most appropriate image data set(s) and mapping algorithm(s) to use for specified seagrass properties;
-
(2)
Producing map products that are ecologically appropriate and suitably accurate;
-
(3)
Measuring and presenting the accuracy properly for maps of seagrass properties; and
-
(4)
Re-inventing or duplicating existing methods.
The first two challenges are a function of the continual increase in the range of airborne and satellite imaging systems being made available for private and public use, which is accompanied by a shift towards open access data and image processing software . The net result of these changes is that remotely sensed data are incredibly easy to access and to process for a much wider range of people. As a result it is easy to obtain an image and attempt to process it, without any expert knowledge or experience with the feature being mapped. The literature clearly shows it is essential for all forms of seagrass mapping to incorporate field data and expert knowledge in the initial selection of the appropriateness of remote sensing for the mapping situation and in the calibration and validation phases of any mapping project. We encourage readers to follow the mapping examples presented in Sects. 15.4 and 15.5 of this chapter. Measurement of thematic map accuracy, for seagrass species composition, or estimation accuracy for seagrass biomass mapping requires carefully designed field programs and use of appropriate error metrics, such as those explained in Sect. 15.3. However, this step is often ignored, or not conducted with sufficient data or appropriate methods, which makes the data un-useable or unable to be compared to other data or to detect changes over time. Building on previous works also ensures the potential for duplication of the work is minimised and enables a shared body of knowledge to be built that will more effectively link ecological and management applications to appropriate remote sensing data collection and processing.
The future capabilities for using remote sensing to map and monitor seagrass and its biophysical properties are extremely promising due to the challenges listed above, including: the greater range of image data sources and processing tools, more open access and shared data and algorithms , and greater ecological-remote sensing interactions. Collectively it means we have a greater data collection and informed processing capacity, that is more likely to share knowledge and skills about how to effectively map and monitor seagrass properties and advance our abilities. It means we can build approaches to work across a range of environments and conditions. A central part of this capacity is improved communication and cooperation and to achieve this a toolkit for explaining how to use remote sensing to map and monitor specific environmental properties, including seagrass has been established—see (Roelfsema et al. 2010) www.rsrc.org.au/rstoolkit—this provides a site for finding data and solutions for mapping seagrass environments.
References
Adams MP, Saunders MI, Maxwell PS, Tuazon D, Roelfsema CM, Callaghan DP, Leon J, Grinham AR, O’Brien KR (2015) Prioritizing localized management actions for seagrass conservation and restoration using a species distribution model. Aquat Conserv Mar Freshw Ecosyst
Andréfouët S, Kramer P, Torres-Pulliza D, Joyce KE, Hochberg EJ, Garza-Pérez R, Mumby PJ, Riegl B, Yamano H, White WH, Zubia M, Brock JC, Phinn SR, Naseer A, Hatcher BG, Muller-Karger FE (2003) Multi-site evaluation of IKONOS data for classification of tropical coral reef environments. Remote Sens Environ 88:128–143
Beaman R (2010) 3DGBR: A high-resolution depth model for the Great Barrier Reef and Coral Sea. In: Marine tropical sciences research facility (MTSRF). Project 2.5i.1a Final Report. Reef and Rainforest Research Centre, Cairns, Australia
Bearlin AR, Burgman MA, Regan HM (1999) A stochastic model for seagrass (Zostera muelleri) in Port Phillip Bay, Victoria, Australia. Ecol Model 118:131–148
Benson M, Garmestani A (2011) Can we manage for resilience? The integration of resilience thinking into natural resource management in the United States. Environ Manage 48:392–399
Blaschke T, Johansen K, Tiede D (2011) Object-based image analysis for vegetation mapping and monitoring. Adv Environ Remote Sens: Sens Algorithms Appl 241–271
Boström C, Jackson EL, Simenstad CA (2006) Seagrass landscapes and their effects on associated fauna: a review. Estuar Coast Shelf Sci 68:383–403
Brando VE, Dekker AG (2003) Satellite hyperspectral remote sensing for estimating estuarine and coastal water quality. IEEE Trans Geosci Remote Sens 41:1378–1387
Callaghan DP, Leon JX, Saunders MI (2015) Wave modelling as a proxy for seagrass ecological modelling: comparing fetch and process-based predictions for a bay and reef lagoon. Estuar Coast Shelf Sci 153:108–120
Carr J, D’Odorico P, McGlathery K, Wiberg P (2010) Stability and bistability of seagrass ecosystems in shallow coastal lagoons: role of feedbacks with sediment resuspension and light attenuation. J Geophys Res Biogeosci 2005–2012:115
Carr JA, D’Odorico P, McGlathery KJ, Wiberg PL (2011) Modeling the effects of climate change on eelgrass stability and resilience: future scenarios and leading indicators of collapse. Mar Ecol Prog Ser 448:289–301
Carr JA, D’Odorico P, McGlathery KJ, Wiberg PL (2012) Stability and resilience of seagrass meadows to seasonal and interannual dynamics and environmental stress. J Geophys Res Biogeosci 2005–2012:117
Carruthers TJB, Dennison WC, Longstaff BJ, Waycott M, Abal EG, McKenzie LJ, Long WJL (2002) Seagrass habitats of Northeast Australia: models of key processes and controls. Bull Mar Sci 71:1153–1169
Carruthers TJB, Dennison WC, Kendrick GA, Waycott M, Walker DI, Cambridge ML (2007) Seagrasses of south–west Australia: a conceptual synthesis of the world’s most diverse and extensive seagrass meadows. J Exp Mar Biol Ecol 350:21–45
Carter AB, Mckenna SA, Rasheed MA, Mckenzie L, Coles RG (2016) Seagrass mapping synthesis: a resource for coastal management in the Great Barrier Reef World Heritage Area. In: Report to the national environmental science programme. Reef and Rainforest Research Centre Limited, Cairns, 22 p
CEOS (2015) The earth observation handbook [Online]. Committee on Earth Observation Satellites. Available: http://www.eohandbook.com/
Cogan CB, Todd BJ, Lawton P, Noji TT (2009) The role of marine habitat mapping in ecosystem-based management. ICES J Mar Sci: J du Conseil 66:2033–2042
Collier C, Waycott M, McKenzie L (2012) Light thresholds derived from seagrass loss in the coastal zone of the northern Great Barrier Reef, Australia. Ecol Ind 23:211–219
Congalton RG, Green K (1999) Assessing the accuracy of remotely sensed data: principles and practices. CRC Press, New York
Creed JC (1999) Distribution, seasonal abundance and shoot size of the seagrass Halodule wrightii near its southern limit at Rio de Janeiro state, Brazil. Aquat Bot 65:47–58
Dahdouh-Guebas F (2002) The use of remote sensing and GIS in the sustainable management of tropical coastal ecosystems. Environ Dev Sustain 4:93–112
de Boer W (2007) Seagrass–sediment interactions, positive feedbacks and critical thresholds for occurrence: a review. Hydrobiologia 591:5–24
Dekker AG, Brando VE, Anstee JM (2005) Retrospective seagrass change detection in a shallow coastal tidal Australian lake. Remote Sens Environ 97:415–433
Dekker A, Brando V, Anstee J, Fyfe S, Malthus T, Karpouzli E (2006) Remote sensing of seagrass ecosystems: use of spaceborne and airborne sensors. In: Seagrasses: biology, ecology and conservation, Springer, Netherlands
Dennison WC, Abal EG (1999) Moreton Bay study: a scientific basis for the healthy waterways campaign. South East QLD Regional Water Quality Management Strategy Team
Duarte CM (1991) Seagrass depth limits. Aquat Bot 40:363–377
Elkalay K, Frangoulis C, Skliris N, Goffart A, Gobert S, Lepoint G, Hecq J-H (2003) A model of the seasonal dynamics of biomass and production of the seagrass Posidonia oceanica in the Bay of Calvi (Northwestern Mediterranean). Ecol Model 167:1–18
Farina A (1998) Principles and methods in landscape ecology. Springer, Netherlands
Ferwerda J, de Leeuw J, Atzberger C, Vekerdy Z (2007) Satellite-based monitoring of tropical seagrass vegetation: current techniques and future developments. Hydrobiologia 591:59–71
Fong P, Harwell MA (1994) Modeling seagrass communities in tropical and subtropical bays and estuaries: a mathematical model synthesis of current hypotheses. Bull Mar Sci 54(25):757–781
Fonseca M, Whitfield PE, Kelly NM, Bell SS (2002) Modeling seagrass landscape pattern and associated ecological attributes. Ecol Appl 12:218–237
Foster G, Gleason A, Costa B, Battista T, Taylor C (2013) Acoustic applications. In: Goodman JA, Purkis SJ, Phinn S R (eds) Coral reef remote sensing. Springer, Netherlands
Fyfe SK (2003) Spatial and temporal variation in spectral reflectance: are seagrass species spectrally distinct? Limnol Oceanogr 48:464–479
Grech A, Coles RG (2010) An ecosystem-scale predictive model of coastal seagrass distribution. Aquat Conserv Mar Freshw Ecosyst 20:437–444
Green EP, Mumby PJ, Edwards AJ, Clark CD (1996) A review of remote sensing for the assessment and management of tropical coastal resources. Coast Manage 24:1–40
Gunderson LH, Allen CR, Holling CS (2009) Foundations of ecological resilience. In: Gunderson LH, Allen CR, Holling CS (eds) Island Press
Hedley JD, Harborne AR, Mumby PJ (2005) Technical note: simple and robust removal of sun glint for mapping shallow-water benthos. Int J Remote Sens 26:2107–2112
Hopley D, Smithers S, Parnell K (2007) The Geomorphology of the Great Barrier Reef. Cambridge University Press, Cambridge
Hossain MS, Bujang JS, Zakaria MH, Hashim M (2015) The application of remote sensing to seagrass ecosystems: an overview and future research prospects. Int J Remote Sens 36:61–114
Hughes TP, Graham NAJ, Jackson JBC, Mumby PJ, Steneck RS (2010) Rising to the challenge of sustaining coral reef resilience. Trends Ecol Evol 25:633–642
Hyland SJ, Courtney A, Butler C (1989) Distribution of seagrass in the Moreton region from Coolangatta to Noosa [Queensland]. Information Series-Queensland Department of Primary Industries (Australia)
Kelly NM, Fonseca M, Whitfield P (2001) Predictive mapping for management and conservation of seagrass beds in North Carolina. Aquat Conserv Mar Freshw Ecosyst 11:437–451
Kendrick GA, Eckersley J, Walker DI (1999) Landscape-scale changes in seagrass distribution over time: a case study from Success Bank, Western Australia. Aquat Bot 65:293–309
Kendrick GA, Marbà N, Duarte CM (2005) Modelling formation of complex topography by the seagrass Posidonia oceanica. Estuar Coast Shelf Sci 65:717–725
Kenworthy WJ (2000) The role of sexual reproduction in maintaining populations of Halophila decipiens: implications for the biodiversity and conservation of tropical seagrass ecosystems. Pac Conserv Biol 5:260
Kilminster K, Mcmahon K, Waycott M, Kendrick GA, Scanes P, Mckenzie L, O’Brien KR, Lyons M, Ferguson A, Maxwell P, Glasby T, Udy J (2015) Unravelling complexity in seagrass systems for management: Australia as a microcosm. Sci Total Environ
Kirk JTO (1994) Light and photosynthesis in aquatic ecosystems, 2nd edn. Cambridge University Press, New York
Koch EW (2001) Beyond light: physical, geological, and geochemical parameters as possible submersed aquatic vegetation habitat requirements. Estuaries 24:1–17
Koch EW, Ackerman J D, Verduin J, van Keulen M (2006) Fluid dynamics in seagrass ecology—from molecules to ecosystems. In: Seagrasses: biology, ecology and conservation. Springer, New York
Koch MS, Schopmeyer SA, Nielsen OI, Kyhn-Hansen C, Madden CJ (2007) Conceptual model of seagrass die-off in Florida Bay: links to biogeochemical processes. J Exp Mar Biol Ecol 350:73–88
Larkum AWD, Orth R, Duarte CM (2006) Seagrasses: biology ecology and conservation. Springer, Netherlands
Lathrop RG, Montesano P, Haag S (2006) Multi-scale segmentation approach to mapping seagrass habitats using airborne digital camera imagery. Photogram Eng Remote Sens 72:665–675
Leon J (2012) A 20 m spatial resolution seamless multisource Digital Elevation/Depth Model for Lizard Island, northern Great Barrier Reef. Supplement to: Leon JX, Phinn SR, Hamylton S, Saunders MI (2013) Filling the ‘white ribbon’—a seamless multisource Digital Elevation/Depth Model for Lizard Island, northern Great Barrier Reef [Online]. Available http://doi.pangaea.de/10.1594/PANGAEA.804566
Lyons M, Phinn S, Roelfsema C (2011) Integrating quickbird multi-spectral satellite and field data: mapping bathymetry, seagrass cover, seagrass species and change in Moreton Bay, Australia in 2004 and 2007. Remote Sens 3:42–64
Lyons MB, Phinn SR, Roelfsema CM (2012) Long term land cover and seagrass mapping using Landsat and object-based image analysis from 1972 to 2010 in the coastal environment of South East Queensland, Australia. ISPRS J Photogram Remote Sens 71:34–46
Lyons MB, Roelfsema CM, Phinn SR (2013) Towards understanding temporal and spatial dynamics of seagrass landscapes using time-series remote sensing. Estuar Coast Shelf Sci 120:42–53
Lyons M, Roelfsema C, Kovacs E, Samper-Villarreal J, Saunders M, Maxwell P, Phinn S (2015) Rapid monitoring of seagrass biomass using a simple linear modelling approach, in the field and from space. Mar Ecol Prog Ser 530:1–14
Lyzenga DR (1978) Passive remote sensing techniques for mapping water depth and bottom features. Appl Opt 17:379–383
Lyzenga DR (1981) Remote sensing of bottom reflectance and water attenuation parameters in shallow water using aircraft and Landsat data. Int J Remote Sens 2:71–82
March D, Alós J, Cabanellas-Reboredo M, Infantes E, Jordi A, Palmer M (2013) A Bayesian spatial approach for predicting seagrass occurrence. Estuar Coast Shelf Sci 131:206–212
Meling-López AE, Ibarra-Obando SE (1999) Annual life cycles of two Zostera marina L. populations in the Gulf of California: contrasts in seasonality and reproductive effort. Aquat Bot 65:59–69
Mobley C (1994) Light and water: radiative transfer in natural waters academic. San Diego, Calif, p 592
O’Brien KR, Grinham AR, Roelfsema Chris M, Saunders Megan I, Dennison W (2011) Viability criteria for the presence of the seagrass Zostera muelleri in Moreton Bay, based on benthic light dose. In: Modelling and simulation society of Australia and New Zealand
Orth RJ, Carruthers TJ, Dennison WC, Duarte CM, Fourqurean JW, Heck KL, Hughes AR, Kendrick GA, Kenworthy WJ, Olyarnik S (2006) A global crisis for seagrass ecosystems. Bioscience 56:987–996
Phinn S, Dekker A, Brando VE, Roelfsema C (2005) Mapping water quality and substrate cover in optically complex coastal and reef waters: an integrated approach. Mar Pollut Bull 51:459–469
Phinn S, Roelfsema C, Dekker A, Brando V, Anstee J (2008) Mapping seagrass species, cover and biomass in shallow waters: an assessment of satellite multi-spectral and airborne hyper-spectral imaging systems in Moreton Bay (Australia). Remote Sens Environ 112:3413–3425
Plus M, Chapelle A, Ménesguen A, Deslous-Paoli J-M, Auby I (2003) Modelling seasonal dynamics of biomasses and nitrogen contents in a seagrass meadow (Zostera noltii Hornem.): application to the Thau lagoon (French Mediterranean coast). Ecol Model 161:213–238
Purkis S, Roelfsema C (2015) 11 Remote sensing of submerged aquatic vegetation and coral reefs. Remote Sens Wetlands Appl Adv 223
Robbins BD, Bell SS (1994) Seagrass landscapes: a terrestrial approach to the marine subtidal environment. Trends Ecol Evol 9:301–304
Roelfsema CM, Phinn SR, Udy N, Maxwell P (2009) An integrated field and remote sensing approach for mapping seagrass cover, Moretón Bay, Australia. J Spat Sci 54:45–62
Roelfsema CM, Phinn SR, Tracey D, Speirs J, Hewson M, Johansen K (2010) A web based toolkit for using remote sensing to map and monitor terrestrial, marine and atmospheric environments. http://www.gpem.uq.edu.au/brg-rstoolkit/
Roelfsema C, Kovacs EM, Saunders MI, Phinn S, Lyons M, Maxwell P (2013) Challenges of remote sensing for quantifying changes in large complex seagrass environments. Estuar Coast Shelf Sci 133:161–171
Roelfsema CM, Lyons M, Kovacs EM, Maxwell P, Saunders MI, Samper-Villarreal J, Phinn SR (2014) Multi-temporal mapping of seagrass cover, species and biomass: a semi-automated object based image analysis approach. Remote Sens Environ 150:172–187
Saunders MI, Leon J, Phinn SR, Callaghan DP, O’Brien KR, Roelfsema CM, Lovelock CE, Lyons MB, Mumby PJ (2013) Coastal retreat and improved water quality mitigate losses of seagrass from sea level rise. Glob Change Biol 19:2569–2583
Saunders MI, Leon JX, Callaghan DP, Roelfsema CM, Hamylton S, Brown CJ, Baldock T, Golshani A, Phinn SR, Lovelock CE, Hoegh-Guldberg O, Woodroffe CD, Mumby PJ (2014) Interdependency of tropical marine ecosystems in response to climate change. Nat Clim Change 4:724–729
Saunders MI, Bayraktarov E, Roelfsema Chris M, Leon Javier X, Samper-Villarreal J, Phinn Stuart R, Lovelock Catherine E , Mumby Peter J (2015) Spatial and temporal variability of seagrass at Lizard Island, Great Barrier Reef. Botanica Marina
Sintes T, Marbà N, Duarte CM, Kendrick GA (2005) Nonlinear processes in seagrass colonisation explained by simple clonal growth rules. Oikos 108:165–175
Sintes T, Marbà N, Duarte C (2006) Modeling nonlinear seagrass clonal growth: Assessing the efficiency of space occupation across the seagrass flora. Estuaries Coasts 29:72–80
Stevens T, Connolly RM (2004) Testing the utility of abiotic surrogates for marine habitat mapping at scales relevant to management. Biol Cons 119:351–362
Turner M, Gardner RH, O’Neill RV (2001) Landscape ecology in theory and practice. Springer, New York, USA
van der Heide T, Smolders AJP, Rijkens BGA, van Nes EH, van Katwijk MM, Roelofs JGM (2008) Toxicity of reduced nitrogen in eelgrass (Zostera marina) is highly dependent on shoot density and pH. Oecologia 158:411–419
van der Heide T, Bouma TJ, van Nes EH, van de Koppel J, Scheffer M, Roelofs JGM, van Katwijk MM, Smolders AJP (2010) Spatial self-organized patterning in seagrasses along a depth gradient of an intertidal ecosystem. Ecology 91:362–369
Verhagen JHG, Nienhuis PH (1983) Simulation model of production, seasonal changes in biomass and distribution of eelgrass (Zostera marina) in Lake Grevelingen. Mar Ecol Prog Ser 10:187–195
Waycott M, Duarte CM, Carruthers TJ, Orth RJ, Dennison WC, Olyarnik S, Calladine A, Fourqurean JW, Heck KL, Hughes AR (2009) Accelerating loss of seagrasses across the globe threatens coastal ecosystems. Proc Natl Acad Sci 106:12377–12381
Wortmann J, Hearne JW, Adams JB (1997) A mathematical model of an estuarine seagrass. Ecol Model 98:137–149
Wu J (1999) Hierarchy and scaling: extrapolating information along a scaling ladder. Can J Remote Sens 25:367–380
Wu J, Jones B, Li H, Loucks OL (2006) Scaling and uncertainty analysis in ecology, Springer
Wulder MA, Masek JG, Cohen WB, Loveland TR, Woodcock CE (2012) Opening the archive: how free data has enabled the science and monitoring promise of Landsat. Remote Sens Environ 122:2–10
Young P, Kirkman H (1975) The seagrass communities of Moreton Bay, Queensland. Aquat Bot 1:191–202
Zimmerman RC (2006) Light and photosynthesis in seagrass meadows. In: Seagrasses: biology, ecology and conservation. Springer, Netherlands
Zimmerman RC, Dekker A (2006) Aquatic optics: basic concepts for understanding how light affects seagrasses and makes them measurable from space. In: Seagrasses: biology, ecology and conservation. Springer, Netherlands
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG, part of Springer Nature
About this chapter

Cite this chapter
Phinn, S. et al. (2018). Mapping, Monitoring and Modelling Seagrass Using Remote Sensing Techniques. In: Larkum, A., Kendrick, G., Ralph, P. (eds) Seagrasses of Australia. Springer, Cham. https://doi.org/10.1007/978-3-319-71354-0_15
Download citation
DOI: https://doi.org/10.1007/978-3-319-71354-0_15
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-71352-6
Online ISBN: 978-3-319-71354-0
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)