
Abstract
This paper presents a simple and illustrative approach for type synthesis of a family of overconstrained parallel mechanisms having one translational and two rotational movement capability. This family features a spatial limb plus a member of a class of planar symmetrical linkages, connected by a revolute joint either with the machine frame at the base link or with the platform at the output link. Criteria for selecting suitable structures among numerous candidates are proposed by considering the realistic and practical requirements of reconfigurability, movement capability, component design rationality, etc. Exploiting the structures obtained and examined by the criteria proposed leads to a novel 5-DOF hybrid module named TriMule, which offers a lightweight, cost effective, and flexible design particularly suitable for configuring various robotized manufacturing cells.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Overconstrained 1T2R (T-translation; R-rotation) parallel mechanisms can have several advantages over their counterparts that lack overconstraints: higher stiffness, greater cost-effectiveness, and easier-to-obtain explicit inverse/forward kinematics, for example, because the common constraints allow fewer joints to be used. However, type synthesis for parallel mechanisms of this kind is by no means an easy task because the Grübler–Kutzbach formula is unable to identify the virtual constraints produced by the special geometric arrangements of joint axes, and is thereby no longer valid to determine the number of degrees of freedom (DOF) in the structure.
The last few decades have seen tremendous efforts towards type synthesis of lower mobility overconstrained parallel mechanisms in general [1, 2] and those having 1T2R movement capability in particular [3, 4]. Methods currently available include those based upon screw theory [1, 5], group theory [3, 4, 6], linear transformation [7], and many others [8]. These methods are general by first creating individual limbs and then setting the assembly conditions at the final step. However, the procedures are not easily understandable due to their abstraction and/or complicated mathematics. Therefore, it is highly beneficial to develop a simple, illustrative and effective approach that is easily understood not only by academia but also and even more importantly by design engineers. Another challenging issue encountered in type synthesis is that although a large number of structures have been generated, there is a lack of criteria to evaluate which are the better ones even if they have the same 1T2R movement capability [3]. Therefore, the development of criteria to select suitable structures for specific applications is also an open issue to be investigated.
This paper presents a simple, easily visualized yet effective approach for type synthesis of a family of overconstrained 1T2R parallel mechanisms. By fully exploiting the common constraints provided by a plane, Sect. 2 presents a methodology to synthesize 1T2R overconstrained parallel mechanisms featuring a spatial limb plus a member of a class of planar symmetrical linkages, resulting in two subfamilies with and without a properly constrained non-actuated limb. Focused on realistic mechanism design, Sect. 3 investigates the criteria for selecting suitable structures among numerous candidates. Exploiting the structures obtained and equipped with the criteria proposed, Sect. 4 presents a novel 5-DOF hybrid PKM module before the conclusions are drawn in Sect. 5.
2 Methodology
Viewed in terms of kinematic inversion [5], Fig. 1 demonstrates a general structure of the proposed family of overconstrained 1T2R parallel mechanisms. Members belonging to this family feature a spatial limb plus a planar linkage lying in a plane denoted by \( {\prod } \). The two end links of the spatial limb are represented by Body I and Body III, whilst those of the planar linkage are denoted by Body II and Body III, respectively. Body I and Body II are connected by a revolute joint, denoted by R, with its joint axis n-n parallel to \( {\prod } \). In addition, there are actuated prismatic joints for achieving high rigidity, each denoted by P, in the spatial limb and in each of two identical limbs of the planar linkage. The planar linkage may also have one properly constrained non-actuated limb. The term ‘properly constrained’ here means that the number and type of degrees of freedom of the limb is exactly the same as those of the output link.

General structure of a family of overconstrained 1T2R parallel mechanisms
Using these descriptions, two subfamilies of overconstrained 1T2R parallel mechanisms can be synthesized by giving Body I (or Body III) either of two roles in the system. In the first subfamily, Body I is taken as the machine frame, and Body III thereby as the output link of the planar linkage to which the platform is attached, leading to Body II being the base link of the linkage. Kinematic inversion produces the second subfamily where Body I is taken as the platform, Body II as the output link, and Body III as the machine frame to which the base link is attached. Hence, 1T2R platform motion arises from 1T1R internal motion of the output link and 1R motion of the platform about the axis n-n with respect to either the output link or the machine frame.
As shown in Fig. 2(a), assume that the planar linkage has a basic form represented by a six-bar linkage with a single-loop closure. In each actuated limb, the joint connecting the limb to the output link is an R joint, while the inner joint and the joint connecting the limb with the base link are either a P or an R joint. Then, the axis n-n is confined to be parallel to the common normal to the two R joints at either the base link or the output link as shown in Fig. 1. Note that the output link in the basic form has 2T1R internal mobility. Hence, a 1T internal motion must be restricted by imposing one additional constraint wrench \( {\mathbf{\$ }}_{wc} \) (a pure force) with its axis parallel to \( {\prod } \). Then, 1T2R movement capability of the platform can be achieved by simultaneously adding a 1R motion about the axis n-n. The required constraint wrench can be generated by either of two ways: (i) the use of a properly constrained non-actuated limb embedded between two actuated limbs for achieving structural symmetry as shown in Fig. 2(b), or (ii) the use of a 5-DOF spatial limb as shown in Fig. 2(c). Consequently, two classes of overconstrained 1T2R parallel mechanisms in each subfamily can be generated with ease using the procedures introduced as follows.

(a) A basic form of planar linkage, (b) A properly constrained non-actuated limb, (c) A 5-DOF spatial limb
Class A: mechanism using a properly constrained non-actuated limb
Members belonging to this class feature a 6-DOF spatial limb plus a stand-alone 1T1R planar parallel mechanism containing a properly constrained non-actuated limb, connected by an R joint to the machine frame at the base link in the first subfamily, or to the platform at the output link in the second. Two types of such constrained limbs, denoted by RP and PR (P stands for a non-actuated prismatic joint), are available for achieving structural symmetry. Both provide the output link with a constraint wrench (a force) \( {\mathbf{\$ }}_{wc} \) lying in \( {\prod } \), passing through the R joint axis, and being normal to the P joint direction as depicted in Fig. 3. As a result, the 1T internal motion of the output link parallel to the wrench axis is restricted. This class uses a 6-DOF spatial limb to provide the platform with an actuation to generate 1R motion about the axis n-n. Considering only those structures simultaneously actuated by three internal or external P joints, Fig. 4 shows four overconstrained 1T2R parallel mechanisms, where S and U denote a spherical and universal joint.

Constraint wrench imposed by a properly constrained non-actuated limb

Typical overconstrained 1T2R parallel mechanisms of class A
Class B: mechanism without properly constrained non-actuated limb
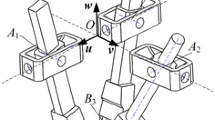
Members belonging to this class generally feature a 5-DOF spatial limb plus the 2T1R six-bar under-constrained planar linkage as shown in Fig. 2(a), connected by an R joint as discussed in Class A. Numerous 5-DOF spatial limbs are available to do this [5], but we here consider only those having four R joints and one P joint for practical use. Within this category, the location and direction of the constraint wrench can uniquely be determined by the conditions: (i) the axis of one R joint, denoted by R1, is parallel to the wrench axis, (ii) the axes of the other three R joints, each denoted by R2, intersect the wrench axis at a common point, and (iii) the axis of the P joint is normal to the wrench axis, namely normal to the R1 joint axis. By sequentially ordering all joints from the machine frame to the platform and utilizing joint substitutions, these conditions reveal four possible limb structures, denoted respectively by SPR1, UPR2R1, R1 PS and PR1S.
To assemble the spatial limb with the planar linkage, the direction of the R1 joint axis must be placed correctly with respect to its location and the direction of the permitted 1T internal motion of the output link. For example, if the R1 joint connects the spatial limb with the platform, the joint axis should be parallel to the common normal of the axes of the two R joints connecting the output link as shown in Fig. 5(a). But if the R1 joint connects the spatial limb with the machine frame, the joint axis should be parallel to \( {\prod } \) and normal to the direction of the 1T permitted motion as shown in Fig. 5(b). Similarly, if the P joint connects the spatial limb with the machine frame, the P joint axis should be parallel to the direction of the 1T permitted motion and the R1 joint axis parallel to \( {\prod } \) as shown by the dashed line in Fig. 5(b). Figure 6 shows some typical overconstrained 1T2R parallel mechanisms, all integrating three R2 joints into an S joint to achieve a two-link limb design and only considering those simultaneously actuated by three internal P joints though many other possibilities exist.

Location and direction of the constraint wrench and the R1 joint axis

Typical overconstrained 1T2R parallel mechanisms of class B
3 Criteria for Selecting Suitable Structures
Selecting suitable structures for 1T2R parallel mechanisms from among the huge number of candidates is a challenging issue in developing 5-DOF hybrid robotized modules where high rigidity, high dynamic responses are the essential requirements. By considering the realistic and practical requirements of reconfigurability, movement capability, component design rationality, etc., four important criteria are proposed as follows.
-
Criterion 1: A suitable structure should have a relatively large ratio of workspace volume against footprint so that the relevant PKM can be integrated into a rigid yet compact module, as exactly exhibited by the Sprint Z3 head, the Tricept as well as the Exechon, for configuring various manufacturing cells.
-
Criterion 2: A suitable structure should have identical or nearly identical actuated limbs (due to the overconstraints). This not only leads to cost effective designs but also is valuable for achieving an appropriate movement capability.
-
Criterion 3: A suitable structure must allow the main body of all lower mobility limbs to be given shapes having high bending and/or torsional stiffness/mass ratios.
-
Criterion 4: A suitable structure should have an explicit solution to its inverse kinematics, an important issue for CNC control. An explicit solution to the forward kinematics is not essential, but is very useful for rapid online monitoring of the platform poses.
4 An Example
Exploiting the structures obtained in Sect. 2 and the criteria presented in Sect. 3, we propose a novel 5-DOF hybrid module, named TriMule [9], shown in Fig. 7(a). Its essential structure is the overconstrained 1T2R parallel mechanism shown in Fig. 4(a). A critical feature is that this base link is elaborately designed into a three-in-one part that locates the rear R joints of the two actuated RPR limbs, and the R and P joints of the RP limb. Compared with the non-constrained 1T2R parallel mechanism used in the Tricept (see Fig. 7(b)), the new design can theoretically save up to six R joints. This can be done by replacing the front S joints of two UPS limbs by R joints, and integrating the rear U joints of the two UPS limbs and the U joint of UP limb into the three-in-one component. However, by the criteria proposed in Sect. 3, it is preferable in practice to use two RPS limbs instead of two RPR limbs in the planar linkage. This is because constraint bending and torsional moments imposed on these limbs can then be avoided completely though these loads will anyway be carried to a great extent by the properly constrained non-actuated RP limb. A significant potential advantage of the TriMule over the Tricept arises from its integration of the joints connecting the base link and the machine frame into a three-in-one part supported at each side by a roller bearing requiring only a small outer frame. It is this novelty that indeed offers a lightweight, cost effective and flexible design of a 5-DOF hybrid module particularly suitable for configuring various robotized manufacturing cells.

3D view of (a) TriMule and (b) Tricept
5 Conclusions
An approach is proposed for type synthesis of overconstrained 1T2R parallel mechanisms, resulting in a family comprising a spatial limb plus a member of a class of planar linkages, connected by a revolute joint. By considering the realistic and practical requirements of reconfigurability, movement capability, component design rationality, etc., four important criteria are proposed for selecting suitable structures from numerous candidates, leading to a lightweight, cost effective and flexible design of a novel 5-DOF hybrid module named TriMule.
References
Huang, Z., Li, Q.: General methodology for type synthesis of symmetrical lower-mobility parallel manipulators and several novel manipulators. Int. J. Robot. Res. 21(2), 131–145 (2002)
Fang, Y., Tsai, L.-W.: Structure synthesis of a class of 4-DOF and 5-DOF parallel manipulators with identical limb structures. Int. J. Robot. Res. 21(9), 799–810 (2002)
Li, Q., Hervé, J.-M.: 1T2R parallel mechanisms without parasitic motion. IEEE Trans. Robot. 26(3), 401–410 (2010)
Li, Q., Hervé, J.-M.: Type synthesis of 3-DOF RPR-equivalent parallel mechanisms. IEEE Trans. Robot. 30(6), 1333–1343 (2014)
Fang, Y., Tsai, L.-W.: Structure synthesis of a class of 3-DOF rotational parallel manipulators. IEEE Trans. Robot. Autom. 20(1), 117–121 (2004)
Hervé, J.-M.: The Lie group of rigid body displacements, a fundamental tool for mechanism design. Mech. Mach. Theory 34(5), 719–730 (1999)
Gogu, G.: Structural synthesis of fully-isotropic parallel robots with Schönflies motions via theory of linear transformations and evolutionary morphology. Eur. J. Mech. A/Solids 26(2), 242–269 (2007)
Yang, T., Liu, A., Jin, Q., Luo, Y., Shen, H., Hang, L.: Position and orientation characteristic equation for topological design of robot mechanisms. J. Mech. Des. 131(2), 021001.1–021001.17 (2009)
Huang, T., et al.: A novel 5-DOF hybrid robot with multi-axes gimbal holder, China Patent, No. ZL201510401279.9 (2015)
Acknowledgments
The research is partially supported by National Key Basic Research Program (2014CB046603) and National Natural Science Foundation of China (51420105007).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this paper
Cite this paper
Dong, C., Liu, H., Liu, Q., Sun, T., Huang, T., Chetwynd, D.G. (2018). An Approach for Type Synthesis of Overconstrained 1T2R Parallel Mechanisms. In: Zeghloul, S., Romdhane, L., Laribi, M. (eds) Computational Kinematics. Mechanisms and Machine Science, vol 50. Springer, Cham. https://doi.org/10.1007/978-3-319-60867-9_31
Download citation
DOI: https://doi.org/10.1007/978-3-319-60867-9_31
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-60866-2
Online ISBN: 978-3-319-60867-9
eBook Packages: EngineeringEngineering (R0)