
Abstract
African weakly electric fish live nocturnally in tropical freshwater streams. To sense their surroundings, they have developed a highly specialized system of two senses, which allows them to perceive nearby objects at high precision with an active electric sense and to detect large, fast-moving objects with their visual sense at greater distances. Both senses are highly specialized and are equipped with matched filters for efficient detection and analysis of relevant object features and for neglecting unimportant items. Active electrolocation in the near field involves the production of an electric signal, which serves as a carrier for sensory information. This signal and the resulting electric field around the fish are shaped by the fish’s body and its internal structure. The electric skin properties and the accessory structures of the electroreceptor organs further filter the signal and form two electroreceptive foveae. In contrast, the visual system is adapted for detecting large objects at longer distances. A grouped retina forms a visual matched filter, which filters out small, nearby objects but efficiently detects fast-moving distant objects even under noisy and dim light conditions.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Electroreception
Many aquatic animals are ableto detect naturally occurring electric signals coming from the environment. Electroreception is an ancient sensory modality which was present already in early fishlike vertebrates (Bullock et al. 1983). The fact that electroreception is still present in most fish taxa, with the notable exception of many teleosts, shows that the perception of electric signals offers an advantage in the aquatic habitat. The majority of electroreceptive animals use passive electrolocation, during which they can detect and analyze electric signals from the environment (Bodznick and Montgomery 2005; Wilkens and Hofmann 2005). Besides fish, only a few vertebrates and maybe some invertebrates possess this sense, i.e., several aquatic urodele amphibians, the platypus (Ornithorhynchus anatinus), the short-beaked echidna (Tachyglossus aculeatus) (Pettigrew 1999; Proske et al. 1998; Scheich et al. 1986), and the Guiana dolphin (Sotalia guianensis) (Czech-Damal et al. 2012). All these animals probably detect environmental electric fields for orientation and for prey detection, i.e., to find and identify benthic prey animals by the electric fields they unintentionally emit. Passively electrolocating animals have developed matched filters for these types of signals, which, however, will not be reviewed in this chapter (for additional information, see, e.g., Hofmann et al. 2005).
2 Weakly Electric Fish
In addition to being able to passively perceive environmental electric signals, weakly electric fish can actively produce electric signals for the purpose of active electrolocation (Lissmann and Machin 1958) and for electrocommunication (Szabo and Moller 1984). African (Mormyriformes) and South American (Gymnotiformes) weakly electric fish use specialized electric organs to produce their high frequency electric signals (i.e., with significant energy up to about 5 kHz or more), which are therefore called electric organ discharges (EOD ). There are two main types of EODs: (1) brief, pulse-like signals and (2) continuous wave-type discharges. Pulse-type EODs have a duration that is much shorter than the inter-pulse intervals, which means they can be shorter than 200 μs in some mormyrids, while other species generate EODs with durations of several milliseconds. In the case of mormyrids, inter-pulse intervals of single individuals are highly variable and depend on the behavioral context. Most pulse-type EODs have extremely constant waveforms, which depends on the species, the sex, and the hormonal state of the sender animal. Since the animals cannot vary the EOD waveform on a short-term basis, they have to rely on other means such as modulating the inter-pulse intervals to change the information content during electrocommunication.
Since weakly electric fish produce their own signals for environmental sensing and for electrocommunication , they have to invest stimulus – energy. Even though there are no experimental studies on the costs of electric signaling in mormyrids, it has been found that in the gymnotiform pulse-fish Brachyhypopomus gauderio females allocate only a small fraction (3 %) of their daily energy budget to electrogenesis. In contrast, males of this species invest daily 11–22 %, on average 15 %, of their energy into the production of their sexually dimorphic signals (Salazar and Stoddard 2008; Stoddard and Salazar 2011). This discrepancy originates from males producing EODs of higher amplitude and longer duration than females in order to signal territory ownership and attract females. Their high energy allocation therefore serves communicative functions during female sexual selection, while EODs in females are used for navigational purposes only. Males may respond to these high energetic costs by showing a daily plasticity in EOD production with EOD duration and amplitude being reduced during daytime, when the fish are inactive and resting. In a recent article, the energetics of electric organ discharge generation in gymnotiform weakly electric fish was investigated in a theoretical analysis (Salazar et al. 2013). This study showed that performance-related costs of EOD generation in Gymnotiformes can be surprisingly high, up to 30 % of the routine energy consumption, but it depends very much on the species, the sex, and the behavioral situation of the animal. Similar studies on the mormyrid G. petersii are missing, but it can be assumed that for mormyrids, energy costs for EOD production may be similar to those measured for female Gymnotiformes, indicating that in general production of navigational signals in African electric fish may represent only a relatively small fraction of their total energy budget (Stoddard and Salazar 2011), similar to a bat’s navigational sonar (Speakman and Ravey 1991). In contrast, the processing of electrosensory input in mormyrids may be much more costly. In one study, it was shown that the huge brain of G. petersii is responsible for 60 % of the resting energy consumption (Nilsson 1996).
Weakly electric fish are usually active at night, and in the absence of light, they use their EODs for active electrolocation and electrocommunication. An advantage of the use of electric signals for these tasks in contrast to acoustic or visual signals is that EOD waveform is only little distorted by the environment (Hopkins 2009). Whereas acoustic signals are often distorted by the medium and objects within it in various and often frequency-dependent ways (reflection, refraction, scattering, attenuation), electric signals are only attenuated (but not in a frequency-dependent way) and their waveforms pass almost unaffected through the medium, even if this is turbid and noisy. As a consequence, the shape of the received signals varies only slightly from the emitted signals. Weakly electric fish exploit this fact by using temporal and waveform cues during both electrocommunication and active electrolocation (von der Emde 2011).
All electroreceptive animals possess specialized electroreceptor organs , which are located in their skins (Hopkins 2009). In weakly electric fish, three types of special receptor organs are used for passive electrolocation, for active electrolocation, and for electrocommunication. During active electrolocation, a weakly electric fish discharges its electric organ and thus builds up an electric field around its body that is perceived by an array of cutaneous electroreceptor organs that are distributed over almost the entire body surface of the fish (Hollmann et al. 2008). Objects differing in electric impedance from the surrounding water are detected because they interact with the electric field and modulate the EOD amplitude and waveform, which is detected by the animal’s electroreceptor organs (von der Emde and Engelmann 2011 ).
3 The Elephant Nose Fish Gnathonemus petersii as a Model System in Sensory Ecology
In this chapter, we will concentrate on the weakly electric fish Gnathonemus petersii , the elephantnose fish, which is a well-studied example for sensory adaptations and matched filtering in several sensory modalities. Gnathonemus is well known for its movable chin appendix, the Schnauzenorgan, a characteristic fingerlike sense organ covered densely by electroreceptor organs (Amey-Özel et al. 2015). Since we know a lot not only about G. petersii’s electric sense but also about its visual sense, this species is a perfect example of how animal senses adapt to environmental conditions and how different sensing tasks are allocated to different sensory modalities.
G. petersii lives in small creeks and rivers of Central and West Africa, where – at least seasonally – floods might cause a high turbidity of the water (Moller 1995). The major freshwater environments inhabited by G. petersii are moist forest rivers, but they were also found in savanna/dry forest rivers as well as in floodplains, swamps and lakes, and large river deltas (Moritz 2010). Common features of all these habitats are relative low light levels because of shade provided by tree or bush cover, a reddish color of the water, and often rather fast-flowing currents (Fig. 9.1). The water is of low electric conductivity, usually below 100 μs/cm, and has temperatures above 25° C. G. petersii was regularly observed within fast-flowing parts of the river (e.g., under roots and driftwood), in holes in the embankment, or at sites of dense vegetation, always close to current (Moritz 2010). The turbidity of the water was found to be relatively high, with turbidity values between 45 and 1,670.5 FTU (Ogbeibu and Ezeunara 2005; Francke et al. 2014). In such an environment, active electrolocation offers clear advantages, because electric signals in contrast to visual or acoustic signals are better suited to pass unaffected through the turbid and noisy water environment (Hopkins 2009).

Typical habitat of Gnathonemus petersii, the Iguidi river in Benin, a relatively fast-moving creek during daytime. G. petersii (inset) lives in red-colored forest streams shaded by vegetation (Photo by Vivica von Vietinghoff. Inset photo by Maik Dobiey taken in the lab of the authors)
Like most mormyrids, G. petersii hides during the day, becomes active at dusk, and stays so throughout the night (Moller et al. 1979; Okedi 1965). It is a bottom feeder, searching for small insect larvae, mainly chironomids (Diptera), which are buried in the soil. G. petersii digs them out, using its Schnauzenorgan. This is also indicated by the large amount of sand and organic matter found in their stomachs (Nwani et al. 2011). For detecting its prey on the ground, the active electric sense (active electrolocation) plays a dominant role, accompanied by the chemical senses (von der Emde and Bleckmann 1998). To do so, the fish have evolved a special matched filter for electric prey detection (see below). The presence of light does not improve prey detection, suggesting that vision is not used for prey identification. The prey items are rather small and thus probably not visually detectable by the fish, since G. petersii cannot see objects spanning less than about 3° of visual angle (see below, Schuster and Amtsfeld 2002; Landsberger et al. 2008; Kreysing et al. 2012).
Generally, the dominant sense for object detection and identification in G. petersii is the active electric sense. It is very difficult to train the fish to react to the presence of an object which they only can see but not electrolocate (Schuster and Amtsfeld 2002; Landsberger et al. 2008). In contrast, several studies have shown that G. petersii can quickly and easily learn to discriminate electrically between two objects differing in shape, size, material composition, or distance (von der Emde et al. 2010; von der Emde and Fetz 2007). These studies also showed that the fish usually do not use vision to discriminate between stationary objects (even large objects of several centimeter size).
Nevertheless, the eyes of G. petersii are large and well developed, and the fish obviously respond to visual signals, which can be noticed easily when keeping the fish in an aquarium. So, what is the function of the visual sense in these animals? Below, we will argue that these fish have a division of labor between the active electric and the visual senses: Since the electric sense takes over the tasks of prey detection and close-up object inspection, the visual sense has evolved a matched filter for the detection of large moving objects and the detection of self-movement in fast water currents. In addition, the fish have developed a unique anti-noise filter, which allows them to see through turbid (“noisy”) waters carrying lots of small particles.
4 The Electric Sense in the Weakly Electric Fish Gnathonemus petersii
4.1 Prey Detection
As mentioned above, G. petersii employs active electrolocation for navigating in its environment and for detecting prey (mosquito larvae) during its nocturnal activity period. Detecting a partially buried, tiny insect larva on the ground of a tropical river is not an easy task, considering the abundance of many similarly shaped nearby objects, which may have similar electric resistances as the prey. One might think that prey detection and especially prey identification is like finding a “needle in the haystack” and requires complex and thus “costly” neural machinery with a lot of signal processing power. However, as shown below, this is not the case. The solution to the problem is the exploitation of characteristic sensory features of living prey items and the use of matched filters for their detection.
Finding prey might be easier for an electric fish if the prey item has unique properties, which are absent in the multitude of other objects surrounding the prey. It was suggested that such a unique mark might be the capacitive properties, which only living objects (water plants, other fishes, and insect larvae) possess in addition to resistive components (Schwan 1963; Heiligenberg 1973). To test whether mormyrids can perceive capacitive object properties, behavioral experiments were conducted. It turned out that indeed G. petersii (von der Emde 1990) and other mormyrids (von der Emde and Ringer 1992) can unambiguously discriminate between resistive and capacitive objects. They can distinguish a capacitor from a resistor, and thus a living prey item from a dead object, by measuring the capacitive-induced waveform distortions of the locally perceived EOD (von der Emde and Bleckmann 1992a). Waveform distortions only occur in the presence of capacitive, i.e., living, objects. They depend on the capacitive value of the object (as well as on its size and shape) and are thus unique indicators of certain prey items. Using active electrolocation, mormyrids are able to measure quantitatively even very small EOD waveform distortions caused by a living object and thus identify their prey (von der Emde and Ronacher 1994). Because of this, it was suggested that capacitive properties of prey items are like colors of visually perceived objects, and in analogy, capacitance detection was called “electric color perception” in weakly electric fish (von der Emde 1993; von der Emde and Schwarz 2002). A living insect larva on the ground of the river thus stands out of the surrounding inanimate objects by having an “electric color” and is thus quickly detected and identified by foraging G. petersii.
4.1.1 Matched Filters for Prey Identification
According to Wehner’s definition (1987), a matched filter is an arrangement of specialized sensory elements in such a way that it is matched to the sensory stimuli to be received. As a consequence, the sensors respond optimally only to those stimuli that the animal aims to detect, while other stimuli are discarded. Because the unwanted stimuli do not even reach the brain, the nervous system is freed of dealing with them and can concentrate on the relevant aspects of sensory input. The periphery takes over the task of filtering the sensory input, which results in a fast and effective recognition of relevant sensory information.
The relevant stimuli for prey identification are the waveform distortions of the local EOD , which are caused by the capacitive properties of the prey items. How are they detected? The local EOD has a duration of only about 500 μs, and to detect minute distortions of such a short signal might require an extremely fast receptor unit with a sampling rate in the nanosecond range, which a biological receptor cell cannot achieve. The solution to this problem is matched filtering realized by pre-receptor mechanisms of the electroreceptor organs.
The electroreceptor organs used for active electrolocation are the so-called mormyromasts (Szabo and Wersäll 1970). There are about 2,500 mormyromasts in the skin of a G. petersii, and they are distributed over large parts of the body surface except for an area at the flanks of the animal (Fig. 9.2a). Like all electroreceptor organs, mormyromasts are located in the epidermis and contain several electroreceptor cells and supporting structures. Each mormyromast houses two types of receptor cells that are tuned to different aspects of the signal carrier, i.e., one channel for amplitude and one for waveform coding. A-cells are found at the basal part of the outer chamber, while B-cells are located inside of an inner chamber (Fig. 9.2b). Both are innervated by separate nerve fibers, which project to the brain, where type A and B afferents terminate in separate areas (Bell 1990). The most important difference between A- and B-type afferent fibers is the sensitivity of only the B-cells to waveform distortions of the EOD, such as those which are caused by capacitive objects (von der Emde and Bleckmann 1992a). Type B cells are exquisitely sensitive to such distortions, whereas type A cells are not. Both are similarly sensitive to changes in EOD amplitude. It follows that in the presence of a capacitive object, B-cells but not A-cells will respond by firing more action potentials because of the waveform distortions caused by the object. These findings suggest that the fish sense the capacitive properties of objects independently of the resistive properties, by centrally comparing the responses of A- and B-cells.

(a) Density of mormyromast electroreceptors over the body surface of G. petersii (Modified after Hollmann et al. 2008), showing highest numbers of electroreceptor organs at the tip of the Schnauzenorgan. (b) Drawing of a section through the skin of G. petersii with a mormyromast organ (Modified after von der Emde et al. 2008)
How does the waveform sensitivity of the B-cells come about? A “normal” electroreceptor cell would not respond to waveform distortions at all, but would require other signal properties such as higher signal amplitudes to increase firing. The B-cells are located inside an inner chamber of the mormyromast, which is connected to an outer chamber through a small canal. The outer chamber houses the A-cells and is connected by another canal to the surface of the skin, where the mormyromast forms a small pore (Fig. 9.2b) (Amey-Özel et al. 2012). The chambers and the canals of the whole organ are loosely filled with epidermal cells, and the walls are made by supporting cells, which form a tight barrier between the surrounding tissue and the inside of the chambers. This arrangement of the mormyromast is crucial for the sensory properties of the electroreceptor organ and for the waveform sensitivity of the B-cells, in particular. The building blocks of the mormyromasts shape, or filter, the sensory signal (the locally occurring EOD) in such a way that even minor waveform distortions of the local EOD caused by living prey items will depolarize the membrane of B-cells and cause it to fire action potentials (von der Emde and Bleckmann 1992b). This filtering is exactly matched to those waveform distortions, which are caused by living objects. Other, unnatural types of waveform distortions are not affective and will either not work at all or even inhibit the receptor cell (von der Emde and Bleckmann 1997).
As mentioned above, A-cells do not respond to waveform distortions and therefore should not change their firing activity in the presence of a capacitive object that does not change signal amplitude. To our surprise, however, when recording from A-cell afferents, we found that A-cells responded negatively, i.e., with a reduced firing activity, when a capacitive object approached the receptor pore (von der Emde and Bleckmann 1992a). The reason for this is that A-cells are tuned to much lower frequencies than those at the peak of the spectrum of a single EOD . Capacitive objects not only distort the EOD waveform but in addition they shift the peak power spectral frequency to higher values, even further away from the optimal frequency of the A-cell's tuning curve. A frequency shift to higher values thus causes A-cells to fire less when a capacitive object is present. As a result, capacitive objects evoke an opposite response in A- and B-cells, which increases the contrast in firing behavior between the two cell types. All this is achieved by the peripheral filtering apparatus of the receptor organ, only, and without any neural processing.
The described matched filter for capacitive object properties is located in the periphery of the electrosensory system and makes complex neural machinery for signal analysis unnecessary. Instead of involving a multitude of downstream neurons in the brain, the job is done in the periphery by the membrane properties of the receptor cells and by a certain arrangement of supporting non-sensory structures of simple and “cheap” epidermal cells.
4.2 The Electric Fovea Hypothesis
Mormyrid fish possess three types of epidermal electroreceptor organs, each containing at least one type of electroreceptor cell. In addition to the mormyromasts, which are exquisitely employed for active electrolocation, African electric pulse fish also have so-calledampullary receptor organs (used for passive electrolocation) and Knollenorgan receptor organs (used for electrocommunication). Electroreceptor organs form arrays on the skin of weakly electric fish and the spatial arrangement of the organs affects the functional properties of the whole array during environmental imaging. A certain arrangement can therefore be regarded as a kind of filter that can extract certain stimulus parameters and dismiss others. This principle can be shown for the array of mormyromast receptor organs, which are used for imaging of the environment during active electrolocation. In most mormyrids, mormyromasts are distributed unevenly over the body surface and generally occur at highest density at the head, especially at the Schnauzenorgan, while the tail and the lateral sides of the trunk are free of electroreceptor organs (Harder 1968). Hollmann et al. (2008) divided the fish’s electrosensitive skin into three regions: the Schnauzenorgan, where a continuous decrease from extremely high concentration of mormyromasts at the tip toward moderate density at the base was found; the nasal region above the mouth, where a moderate yet still about three-times higher density occurred compared with the third region, which is the rest of the body (Fig. 9.2a). A similar concentration of receptor organs employed for active electrolocation around the snout was observed in some South American electric fish leading to the idea that this arrangement bears some resemblance to the visual fovea in the retina of vertebrate eyes. Castello et al. (2000) suggested that Gymnotiformes have an electric fovea and a “parafovea” around their mouth and von der Emde and Schwarz (2001b, 2002) described two electric foveae in G. petersii, at the Schnauzenorgan and at the nasal region.
G. petersii has two areas of high receptor organ densities, one at the Schnauzenorgan and the second one at the nasal region. Both of these regions can be regarded as electric foveae, because besides a high receptor density, they have additional specializations that turn them into specialized matched filters (von der Emde et al. 2008). The receptor organs in the foveal regions are smaller and have fewer receptor cells than those outside the foveae (Amey-Özel et al. 2012). As in the visual fovea, both foveal regions of G. petersii are overrepresented in the brain, which means that more nerve cells process the information from a single receptor organ (Bacelo et al. 2008). Finally, there are behavioral adaptations for focusing an object of interest onto the fovea for detailed analysis. Because the nasal region has a circumferential view of the surroundings, by placing it at an angle of ca. 50° relative to the ground, it is brought into a position to optimally inspect the space in front of and at the side of the animal during foraging (Fig. 9.3). In contrast, the Schnauzenorgan performs rhythmic left-right movements. This ensures that during foraging it performs sweeping movements over the ground in order to detect possible prey items with its sensible tip (Fig. 9.3). When an object of interest is encountered, the Schnauzenorgan interrupts its left and right rhythm and moves over the object, following its outline in a certain “fixation pattern.”

Swimming posture of G. petersii when searching for prey on the ground. The two electric foveae at the nasal region and the Schnauzenorgan (SO) are highlighted in red, and their regions of sensory input are indicated by yellow areas
The two foveae serve different functions: the nasal region is a long-range guidance system that is used to detect obstacles or other large objects during foraging. Because of the properties of the skin and the internal tissue of the fish (see below) and because of the arrangement of the mormyromast receptor organs, the nasal fovea responds best to larger objects in front of and at the side of the animal. The Schnauzenorgan, on the other hand, is short-range movable (prey) detection system that is used to find and identify prey on the ground or inspect details of objects. The anatomical structure of the Schnauzenorgan fovea and the special arrangement of mormyromasts turn this area into an effective prey detection device, i.e., a matched filter for living chironomid larvae in and on the ground (see above). Even without neural processing by specialized brain areas, the electroreceptors at the two electric foveae respond only to the relevant stimuli they are specialized for.
4.3 Production of Electric Signals and the Self-Produced Field of G. petersii
As shown above, weakly electric fish developed matched filters that delegate certain tasks of signal analysis into the periphery. Because G. petersii uses an active electrosensory system, matched filtering in these animals also involves the production of the appropriate EODs, which function as the carriers of electrosensory information. Especially at the two foveal regions, the electric field is conditioned by pre-receptor mechanisms to provide a suitable carrier for the respective filtering task.
In mormyrids, the electric organ which emits the EOD is localized in the caudal peduncle of the fish (Fig. 9.4a, b). Electric organs of mormyrids evolved out of the skeletal musculature which used to move the tail of the animals. Tail movement now is achieved through tendons connecting the tail fin to muscles in the trunk anterior to the caudal peduncle. The electric organ consists of hundreds of electrocytes arranged in four columns, which all fire synchronously and thus emit an extremely constant and precise electric signal that builds up an electric field around the animal and ultimately stimulates the epidermal electroreceptor organs (Fig. 9.5a).

(a) Simplified organization of G. petersii’s electric organ located in the caudal peduncle of the tail (Modified after Carlson and Gallant 2013). (b) PA-type electrocyte; Penetrating with anterior innervation of stalk (In innervation, An anterior, Po posterior, P penetration) (Modified after Cheng 2012) (c) Depolarizing current flow through electrocyte, which determines EOD polarity and number of phases (Modified after Carlson and Gallant 2013). (d) Gnathonemus EOD with references to phases of (c)

(a) Electric field lines around Gnathonemus’ body during an EOD. (b) Effect of movement of the Schnauzenorgan on the amplitude of the local EOD. The circles indicate the positions of the recording electrodes with the local EOD recorded at that position shown above. On the left, the electrode at circle 2 records the EOD directly at the tip of the Schnauzenorgan. The amplitudes measured at circles 1 and 3 are much lower. When the Schnauzenorgan is bent to the right by about 62°, the EOD amplitude remains high at the tip (electrode 3) and decreases at electrode 2 (After Pusch et al. 2008). (c) Resistive (left) and capacitive (right) skin properties of G. petersii. Electric properties are color coded onto the contour of a fish (lateral view) with darker colors indicating higher values (Modified after von der Emde and Schwarz 2001b)
Mormyrids produce a short multiphasic electric signal, which has a species-specific (and sometimes sex specific) extremely constant waveform and frequency composition. This constancy is important for active electrolocation, because the electroreceptors respond to even minute changes in signal amplitude and waveform caused by nearby objects. The waveform of the EOD needs to be constant and reliable especially for capacitance detection, which is achieved by measuring waveform distortions of the local signal (see above).
The discharge of the electric organ builds up an electric field around the fish, which is shaped by the electric properties of the fish’s skin and its internal tissue. For optimal filtering at the two foveal regions at the front of the fish, the field has to be strong enough also at the anterior body parts. This is achieved by an increase in skin resistance and capacitance along the fish’s body (Fig. 9.5c) and a low electric resistance of the internal body tissue (von der Emde and Schwarz 2001a; Castello et al. 2000). This ensures that the electric current is funneled through the fish’s body to the head region; a mechanism called “funneling effect.” Currents are additionally channeled by the constantly open mouth, which leads to a homogenous voltage distribution at the nasal region. The vectorial components of the local EOD are out of phase at the trunk of the fish, resulting in a loss of signal intensity. In contrast, at the two foveal regions, these EOD components are highly in phase, which is called “collimation effect.” As a result, the EOD amplitude is almost uniform at the nasal region and the direction toward the sensory surface is constant (Pusch et al. 2008; Castello et al. 2000). This makes the signal carrier equally sensitive to objects located in all three axial spatial dimensions in front of the fish. G. petersii can thus detect and analyze objects that are located in front and at the sides of the fish turning the nasal fovea into a specialized all-round detection device.
Funneling of currents together with the so-called tip effect ensures high-amplitude EODs also at the tip of the Schnauzenorgan, the region with the highest density of receptor organs. The angle of the electric field vector at the Schnauzenorgan is approximately 45° and thus different from that at other body regions, where it is about 90°. To affect the signal carrier at the Schnauzenorgan, an object has to be placed right in front of the animal. Interestingly, the high EOD amplitude at the tip of the Schnauzenorgan is not affected by movements of the chin appendix (Fig. 9.5b). During exploratory and foraging behaviors, Gnathonemus can move its Schnauzenorgan at high velocity of up to 800°/s. These regular scanning movements are often associated with EOD frequencies of 60–80 Hz. Thus, Gnathonemus scans the direct surrounding of the Schnauzenorgan at a rate of up to 10°/EOD (von der Emde et al. 2008). Because of the funneling, collimation, and tip effects, the electric field at the Schnauzenorgan’s tip is very stable and persistent. As a consequence, the receptors at the Schnauzenorgan perceive a constant electric field, which is not altered by self-generated motions.
Alterations of the electric field by body movements and thus a change in electroreceptor input can pose a problem for signal processing in weakly electric fish. In order to detect an object, the fish have to detect even minute object-caused amplitude changes, which are often much weaker than those caused by movements of the fish’s body. In order to perceive object-induced amplitude changes, the brain of the animal has to filter out the self-induced EOD alterations, which requires a complex neuronal machinery and a lot of brain power. The fact that in G. petersii EOD amplitude remains constant even during strong Schnauzenorgan movements thus relieves the nervous system of the task to calculate the exact amount of movement-induced amplitude change and makes the sensory system much more sensitive.
5 The Visual Sense in the Weakly Electric Fish Gnathonemus petersii
Because of their nocturnal activity and their turbid and noisy blackwater habitats, mormyrids were thought to have only a poor sense of vision (Moller et al. 1979). In addition, the structures of the mormyrid visual brain areas in the mes- and diencephalon appear to be highly reduced (Wullimann and Northcutt 1990; Lazar et al. 1984). However, many mormyrids have rather large eyes and also respond sensitively to visual stimuli when held in captivity. In early anatomical work on the eyes of mormyrid fish , which was done even before their active electrosensory system was discovered, it was found by Franz (1921) and then later described in detail by McEwan (1938) that the retina of mormyrids contains large bundles of photoreceptor cells which are collectively ensheathed by large retinal pigment epithelial cells forming cuplike structures. In this section, we argue that the function of the retina in G. petersii is not to transmit information about the point-to-point pattern of the distribution of light and dark in a visual image but to analyze visual stimuli for the detection of fast-moving , low-contrast objects under “noisy” conditions.
5.1 Anatomy, Morphology, and Cytoarchitecture of the Gnathonemus Retina
On the one hand, the retina of G. petersii shows the typical five-layered structure of a vertebrate retina (Kreysing et al. 2012; Landsberger et al. 2008), while on the other hand, it reveals some gross anatomical specializations, which make it very special when compared to other teleosts (Francke et al. 2014) (Fig. 9.6). As in most teleosts, the inner retina consists of the retinal ganglion cells (RGCs) separated by a peculiarly thin inner plexiform layer (IPL) from the inner nuclear layer (INL). The very thin outer plexiform layer (OPL) separates the inner retina from the outer retina. The latter is composed of the photoreceptor nuclei, representing the outer nuclear layer (ONL), and the photoreceptor inner and photosensitive outer segments. In G. petersii, the ONL is formed by two layers of outer segments (Fig. 9.6a). Therrod outer segments (ROS) are aligned at the distal sclerad side of the ONL, and the cone outer segments (COS) are more proximal at the vitread side (Kreysing et al. 2012). The two plexiform layers are the main site for synaptic contacts between the retinal cells. Amacrine, bipolar, and horizontal cells in the INL mediate the intraretinal visual transfer properties (Wagner 2007; Dowling 2012).

(a) General morphology of the retina of G. petersii (light-adapted state). Light has to pass through the cellular layers of the retina, ganglion cell layer (GCL), inner plexiform layer (IPL), outer plexiform layer (OPL), and outer nuclear layer (ONL), before reaching the cups outlined by highly reflective guanine multilayers. (b) Top view onto the cups of the grouped retina slightly above the level of the COS (white circles). (c) Indication of light reflection by the walls of six retinal pigment epithelial cells forming the cuplike structure
The most striking difference to a “normal” fish retina is the observation that the photoreceptors in the Gnathonemus retina are grouped together in bundles consisting of about 330 rods located below about 25 cones. Each bundle of rods and cones lies in a hexagonal cuplike structure, which is formed by six large retinal pigment epithelial (RPE) cells (Landsberger et al. 2008; Kreysing et al. 2012) (Fig. 9.6b). A retina composed of such cups is called a grouped retina (Locket 1977) and similar assemblies are found only in a few other teleostean fish groups, many of which are deep-sea fish (Francke et al. 2014). Each cup forms a macroreceptor unit and has a diameter of around 50 μm, giving rise to an angle of aperture of 2.5° (Francke et al. 2014). Thus, the spatial resolution of the Gnathonemus eye is very low compared to most other teleosts. Gnathonemus cannot separate objects less than about 3° apart (Kreysing et al. 2012). For comparison, the goldfish (which has no grouped retina) is known to visually resolve details at angles more than 15 times smaller, i.e., down to 0.14° (Land and Nilsson 2002).
The inner surface of the Gnathonemus retinal cups acts as a mirror, formed by the reflecting multilayers of guanine crystals, while a mirror surface below the cup is missing (Fig. 9.6). At the bottom of each cup, the cone outer segments (COS) are located. They are thus exposed to the light, which is focused onto the cone outer segments with an increase of the incident light intensity by more than 500 %. In contrast, the rod outer segments (ROS) lie below the cup in a medium filled with light-scattering, submicron-sized guanine crystals and melanin granules, protecting them from the incoming light. Thus, the ROS receive a reduced level of illumination. While light levels for the cones at the bottom of the cup are amplified, the disordered phase of guanine crystallites underneath the cup attenuates the light leaking through the bottom of the cup and only a very small fraction of light reaches the ROS . The combined effect of this arrangement is that both the less sensitive cones and the very sensitive rods receive appropriate amounts of light to allow their simultaneous operation at mesopic light levels, which prevail in the dim habitat of the fish (Francke et al. 2014; Kreysing et al. 2012).
In Gnathonemus, the absorption maximum of the rod pigments is at 536 nm (green), while the single type of cone is most sensitive to 615 nm (red light) (Kreysing et al. 2012). In response to the daily changes of light and darkness, rods change their position to regulate light sensitivity or visual acuity via a process called retinomotor movement (Burnside and Nagle 1983). Under photopic daytime conditions, the bottoms of the cups are almost closed forming a small bottleneck through which the rods protrude into the light-protected area below. Thus, COS and ROS are separated from each other during daytime with the ROS being shielded from the light, while COS are fully light exposed. In contrast during dark adaptation, the bottleneck opens and the cups form a cylinder, in which the ROS are drawn inside the cup toward the inner retina. These movements are induced by rod myoid contractions.
The inner plexiform layer of the retina is rather thin, with about half the thickness as that of most other teleosts. Furthermore, the retina of Gnathonemus appears to lack local specializations such as a visual streak or a fovea centralis. All this suggests that information processing in the grouped retina is less complex than elsewhere. However, the presence of ten types of retinal ganglion cells suggests that like in other retinae, the visual stimuli are processed in several parallel pathways. In particular, fast and dynamic visual stimuli may be mediated by certain ganglion cells, while the amacrine cells may provide for direction and movement sensitivity (Francke et al. 2014). Interestingly, the information provided by rods and cones may be pooled already at the bipolar cell level such that color information is unlikely to be extracted by the brain.
In summary, the retina of G. petersii is a highly specialized and complex structure shaped by specialized epithelial cells. However, its spatial resolution is very low and there is only one type of cone, and also some retinal layers are rather thin and reduced. Information leaving the retina is colorblind but appears to be specialized for the processing of movement. The arrangement into reflecting cups by RPE cells reflects to a high degree the functional properties of the Gnathonemus retina. The apparent disadvantages this retinal arrangement imposes on the fish, however, might actually be advantageous when considering the habitat of the fish. In particular, we argue that the grouped retina forms a matched filter for certain signal properties, namely, for the detection of large, fast-moving objects under dim and noisy light conditions.
5.2 Anatomy of Visual Brain Areas
The optic nerve (ON) consists of the bundled axons of retinal ganglion cells. In G. petersii, the ON is rather thin compared with the size of the eye or the brain, due to the relatively small numbers of retinal ganglion cells of each eye. Before entering the brain, the ON crosses the midline beneath the diencephalon at the optic chiasm and terminates as optic tract in the mesencephalic tectum and tegmentum and in the rostral diencephalon (thalamus, hypothalamus) (Lazar et al. 1984).
A detailed analysis of the retinal projections of G. petersii reveals that many well-established retinofugal connections into the teleost diencephalon are extremely reduced or even absent, while other primary visual regions receive only limited visual input but participate in active electrolocation, instead (Wullimann and Northcutt 1990; Northcutt and Wullimann 1988). In teleosts, retinal projections usually terminate in the suprachiasmatic nucleus (SCN) of the hypothalamus, driving the circadian rhythm. Large retinal terminal fields are also present in the thalamus and in the pretectal complex (central pretectal nucleus (CPN), periventricular pretectal nucleus (PPN), superficial pretectal nucleus (SPN)). The latter structure is further reciprocally connected to the optic tectum (OT) and by this probably involved in the detection of moving objects. In addition, the dorsal and ventral accessory optic nuclei located in the pretectal region receive direct retinal input and are involved in optokinetic oculomotor reflexes (Northcutt and Wullimann 1988; Rupp et al. 1996; Vanegas and Ito 1983).
In G. petersii, this general pattern is modified: retinal efferents terminate in the SCN, the thalamus, the PPN, as well as the OT. CPN receives reduced visual input, while an SPN and accessory visual nuclei are absent (Lazar et al. 1984; Wullimann and Northcutt 1990). The OT forms a relatively minor part of the whole brain, and it is differently located and shaped when compared to other teleosts (Fig. 9.7a). The very large, mostly electrosensory torus semicircularis pushes the two tecta rostrally and laterally, and the huge cerebellum covers the complete dorsal surface of the brain. The right and left tecta are interconnected by the intertectal commissure only at their rostralmost parts. The tectum is stratified as in other teleosteans into seven laminae (Fig. 9.7b) (Pusch et al. 2013b; Meek 1983). The visual input to the OT is only poorly developed, as retinal fibers terminate exclusively in a narrow strip in the stratum fibrosum et griseum (Lazar et al. 1984), whereas in the majority of teleostean species, retinal fibers terminate in three or four deeper layers of the tectum (Fig. 9.7b) (Wullimann 1998; Stürmer and Easter 1984).

(a) Brain sections on the level of the mesencephalon of Carassius and Gnathonemus. (b) General overview of layers of the OT in Carassius and Gnathonemus. For further explanation, see text. Abbreviations: Hy hypothalamus, Nmd mediodorsal mesencephalic nucleus, NL nucleus lateralis of the torus semicircularis, OT optic tectum, SAC stratum album central, SFGC stratum fibrosum et griseum, SGC stratum griseum central, SO stratum opticum, SPV stratum periventriculare, SM stratum marginale, Teg tegmentum, Th thalamus, TL torus longitudinalis, TS torus semicircularis, VaCe valvula cerebelli
The midbrain optic tectum integrates multisensory input and is the main visual center in teleosts. In G. petersii, tectal efferents project reciprocally into PPN, CPN, and the thalamus, while only restricted tectal terminations were detected in the preglomerular region (PG), which in most teleosts serves as a relay station for ascending visual information (Wullimann and Northcutt 1990). Because of limited tectofugal projections in the PG, it might be speculated that visual projections ascending to the dorsal telencephalon have to be provided by another route (Prechtl et al. 1998), maybe involving the torus semicircularis. Even though the tectum is thought to act as a multisensory neural processing area, which is essential for behavioral reactions, anatomical investigations in Gnathonemus showed only very weak electrosensory projections into the tectum (Ruhl et al. 2011; von der Emde unpublished data). However, there are tectal projections into the lateral nucleus of the torus semicircularis, representing the midbrain center for electrosensory processing (Wullimann and Northcutt 1990). Different parts of the electrosensitive torus semicircularis project to the PG area in Gnathonemus (Bell 1981; Finger et al. 1981), suggesting that PG might be more involved in electroreception than in vision and thus might have different functions than those described for other teleosts (Braford et al. 1983).
In summary, even though the retina is highly specialized, the whole visual system in the Gnathonemus brain is clearly reduced. Anatomical findings suggest that during evolution, electrosensation took over some visual regions, e.g., CPN, PG, SPN, and accessory visual nuclei. This suggests that in Gnathonemus vision might be subordinate to the active electric sense. However, it also could mean that the two senses are used for separate tasks. Here, we argue that there is a division of labor between vision and the active electric sense, which led to the development of separate and complementary matched filters in the visual and electric sensory systems. Anatomical and physiological findings indicate that the visual system evolved a matched filter for the detection of fast-moving, large objects and purposely filters out most other visual stimuli.
5.3 Functional Aspects of the Visual System
5.3.1 Detection of Visual Stimuli
In contrast to training G. petersii with electrosensory stimuli, pure visual training is quite difficult and time consuming. When the animals are trained for long enough, they can learn, however, to approach a black square projected onto a screen (Schuster and Amtsfeld 2002; Landsberger et al. 2008). These experiments confirmed that the spatial resolution is so poor that Gnathonemus cannot see objects smaller than about 3° of visual angle, no matter whether these objects are stationary or moving (Kreysing et al. 2012). G. petersii can also learn to discriminate between large, differently shaped visual patterns indicating that visual pattern recognition involves template matching (Schuster and Amtsfeld 2002).
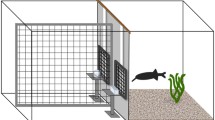
Since the fish cannot see small particles, the involvement of the visual sense in finding their prey (small insect larvae) during foraging is negligible (von der Emde and Bleckmann 1998). In other behaviors, for example, during certain startle responses, it is much stronger. When presenting visual stimuli that rapidly expand in size mimicking the silhouette of an approaching predator, G. petersii consistently responds with a quick flight reaction away from the stimulus. Especially under dim light conditions, this response is much more reliable in Gnathonemus than in the goldfish (Carassius auratus), whereas under bright light, the two species show no differences (Kreysing et al. 2012). Startle experiments like this also showed the advantage of color blindness for G. petersii. The animals were significantly better than goldfish (which can see colors) at detecting an expanding virtual circle which was dynamically defined by the random exchange of equiluminant red and green floating particles. Gnathonemus detected such color-camouflaged stimuli significantly better than the goldfish, showing the advantage of missing color discrimination (i.e., “color pooling”) (Kreysing et al. 2012).
Another study described that G. petersii performs an optomotor response (OMR) when a moving stripe pattern was projected onto the bottom of the tank. Interestingly, the OMR of G. petersii is a very robust behavior, which does not adapt even after longer stimulus periods. The OMR is remarkably resistant to reduced light intensity with a constant gain over more than four orders of magnitude (Landsberger et al. 2008).
When trained in a two-alternative forced-choice paradigm to discriminate between a constant and a flickering light source, the flicker fusion frequency (FFF) of G. petersii was found to lie between 40 and 45 Hz (Fig. 9.8a) (Pusch et al. 2013a). In a similar experiment, the FFF of Carassius was measured at 35–40 Hz (Mora-Ferrer and Gangluff 2002). Behavioral measurements of the animals’ FFF were substantiated by electrophysiological recordings (Fig. 9.8b), showing that in G. petersii the FFF thresholds of neurons in the tectum opticum were at about 50 Hz, while for Carassius it were at about 40 Hz (Pusch et al. 2013a). It follows that G. petersii’s visual system shows a higher temporal resolution than that of the goldfish (Fig. 9.8). In addition, G. petersii’s visual system is less sensitive to a reduction in contrast. In conclusion, both the retinal specializations and the brain circuits of the visual system of G. petersii enable the fish to be extremely effective in detecting fast-moving objects such as approaching predators under dim light conditions.

(a) Behaviorally determined critical flicker fusion frequency in G. petersii (black) and Carassius (gray). The behavioral response to flickering light was tested in a two-alternative forced-choice procedure (Modified after Mora-Ferrer and Gangluff 2002; Pusch et al. 2013a). (b) Normalized amplitudes of visually evoked field potentials in the OT for the different flicker frequencies in Gnathonemus (dark gray) and Carassius (light gray) (Modified after Pusch et al. 2013a)
5.3.2 Noise Tolerance of the Visual System
Considering one macroreceptor of G. petersii with its wide spacing of 50 μm as being the smallest functional unit of the retina, visual spatial resolution is rather low. The bad spatial resolution of the Gnathonemus retina works like a low-pass filter and prevents the animals from seeing small objects and high spatial frequencies. When the fish were trained to respond to a sharp-edged square, G. petersii was easily outperformed by the sunfish (Lepomis gibbosus), a visual specialist taken for comparison. However, if the stimuli were low-passed filtered, which removed all sharp edges, G. petersii could detect these objects better than Lepomis (Landsberger et al. 2008).
As mentioned above, G. petersii lives in blackwater streams carrying dissolved matter and many small particles making these waters very “noisy” (Moritz 2010). In a behavioral experiment, this effect was mimicked by adding small particles to a stripe pattern projected on the bottom of an aquarium, showing that the OMR of G. petersii is remarkably noise tolerant (Landsberger et al. 2008). Similar noise particles were also added to the stimuli in the abovementioned experiments with expanding circles eliciting a startle response in G. petersii and Carassius. The flight responses of both species declined when the threatening stimulus was disguised by dynamic gray noise particles. Gnathonemus, however, was less affected than Carassius (Kreysing et al. 2012). In a two-alternative forced-choice task, Gnathonemus and Lepomis were tested to recognize a black square moving over a screen. More and more dynamic noise particles were added, which concealed the object (Fig. 9.9a). It turned out that Gnathonemus was able to detect the object under higher noise levels than the sunfish, which does not have a grouped retina (Fig. 9.9b) (Petruschke and von der Emde unpublished data).

(a) Different noise levels for disguising a square object during visual object detection: 1 – 0 %, 2 – 25.9 %, 3 – 62.4 %, 4 – 93.3 %, 5 – 96.6 %, 6 – 97.8 %. While Gnathonemus still could perceive the large square in 5 and 6, Lepomis was unable to do so. (b) In a noise suppression experiment with Gnathonemus (black) and Lepomis (gray) in a two-alternative forced-choice procedure, the fish had to swim toward that side of a screen which contained a large black square. The choice of the side with the square was rewarded. When different levels of visual noise were added, Gnathonemus could detect the square even with 97.8 % of noise, while Lepomis failed to do so at 96.6 %
The abovementioned findings show that the fact that G. petersii cannot see high spatial frequencies and small objects can offer an advantage to these animals when the water is filled with small particles. Such visual noise is filtered out and the fish are able to see the larger objects behind the noise. This allows detection of approaching larger objects, e.g., a predator, which is additionally supported by the high temporal resolution of the visual system. In addition, when swept away by the current, fish might be able to see the ground or approaching obstacles even under noisy conditions.
6 Partitioning of Environmental Sensing
In conclusion, weakly electric mormyrid fish possess an elaborated electrosensory system, which consists of peripheral matched filters and a large brain for processing of electrosensory information. The functions of the electric sense are clearly defined: it works very sensitively in a three-dimensional area around the fish up to a distance of about one fish length. It is very effective in detecting and recognizing small objects, mainly prey items, in a very complex environment containing many similar types of objects (“finding the needle in the haystack”). In addition, it can analyze the spatial and material properties of larger objects during close-up inspection very precisely. However, the electrosensory system does not work at larger distances: object detecting fails at distances larger than about 15 cm and object analysis ends even at a distance longer than 4–5 cm in a fish with a standard length of about 12 cm (von der Emde et al. 2010; Fechler and von der Emde 2013).
As shown above, these exceptional electric sensing abilities are made possible by the production of an optimal electric carrier signal, the EOD, and an elaborated processing of electrosensory information by the nervous system. Both EOD production and sensory processing depend to a high degree of peripheral structures, which take over certain aspects of processing and electromotor production and thus free the nervous system of processing duties. In the periphery, the fish have developed several matched filters, which tune the electric carrier by shaping the electric signals (tip effect, funneling effect, electric skin properties). On the sensory side, the fish have evolved two peripheral sensory foveae, one at the tip of the Schnauzenorgan (for prey detection and close-range object analysis) and one in the nasal region (for obstacle detection and short-range navigation). These areas contain specialized electroreceptor organs that due to their accessory structures form matched filters by responding primarily to certain types of electric stimuli. These electrosensory matched filters delegate several aspects of electrosensory processing to the periphery and thus make the system very fast and efficient. Nevertheless, the brain areas of G. petersii that are involved in signal production and perception of electrosensory stimuli are numerous and extremely large. Gnathonemus has a huge brain, which uses up to 60 % of the oxygen consumption of the fish (Nilsson 1996).
Like all mormyrids, G. petersii has highly evolved eyes of a very peculiar structure. Its grouped retina consists of retinal cups with a light-reflecting surface that focuses the light onto the outer segments of the cones and attenuates the light that reaches the rods. This leads to an alignment of the working ranges of rods and cones and enables simultaneous activity of both receptor types during daylight. As a consequence, Gnathonemus shows a superior response to visual stimuli in the mesopic range of illumination compared with fish without a grouped retina. In addition, the grouped retina of G. petersii filters out visual noise and responds extremely well to fast-moving stimuli.
The Gnathonemus retina thus forms a peripheral matched filter turning it into a highly specialized predator detector. Large objects moving at a distance from the fish are especially well detected. If a predator starts an attack against the fish by darting toward it, the grouped retina of G. petersii allows its detection even under unfavorable, “noisy” conditions. The peripheral matched filter frees the nervous system of processing tasks, which in other fishes are performed by the visual centers of the brain. In G. petersii visual brain structures are reduced and partly taken over by the electrosensory system. This “freeing up” of processing power in the brain leads to significant energy savings in the visual system and allows at least parts of the available computational capacity to be redirected to other tasks, e.g., to active electrolocation.
G. petersii has evolved a clear partitioning of sensing: in the near field, they employ active electrolocation and are thus able to find and identify their small prey items within a lot of background clutter in the absence of light during their nocturnal activity period. In addition, they can inspect nearby objects and detect their material and spatial properties. In the far field, the visual sense takes over, which, thanks to its matched filter in the retina, is well adapted to see fast-moving, large objects in dim light even under noisy conditions.
References
Amey-Özel M, Hollmann M, von der Emde G (2012) From the Schnauzenorgan to the back: morphological comparison of mormyromast electroreceptor organs at different skin regions of Gnathonemus petersii. J Morphol 273(6):629–638. doi:10.1002/jmor.20009
Amey-Özel M, von der Emde G, Engelmann J, Grant K (2015) More a finger than a nose: the trigeminal motor and sensory innervation of the Schnauzenorgan in the elephant-nose fish Gnathonemus petersii. J Comp Neurol 523(5):769–789. doi:10.1002/cne.23710
Bacelo J, Engelmann J, Hollmann M, von der Emde G, Grant K (2008) Functional foveae in an electrosensory system. J Comp Neurol 511(3):342–359. doi:10.1002/cne.21843
Bell CC (1981) Some central connections of medullary octavolateral centers in a mormyrid fish. In: Fay RR, Popper AN, Tavolga WN (eds) Hearing and sound communication in fishes. Springer Verlag, Berlin, pp 383–392
Bell CC (1990) Mormyromast electroreceptor organs and their afferent fibers in mormyrid fish. III. Physiological differences between two morphological types of fibers. J Neurophysiol 63(2):319–332
Bodznick D, Montgomery JC (2005) The physiology of low-frequency electrosensory systems. In: Bullock TH, Hopkins CD, Popper AN, Fay RR (eds) Electroreception. Springer, New York, pp 132–153
Braford MRJ, Northcutt RG, Davis RE, Demski LS, Kassel J, Overmier JB, Hollis KL (1983) Fish neurobiology, vol 2. The University of Michigan Press, Ann Arbor
Bullock TH, Bodznick DA, Northcutt RG (1983) The phylogenetic distribution of electroreception: evidence for convergent evolution of a primitive vertebrate sense modality. Brain Res Rev 6:25–46
Burnside B, Nagle B (1983) Retinomotor movements of photoreceptors and retinal pigment epithelium: mechanisms and regulation. In: Osborne NN, Chader GJ (eds) Progress in retinal research. Oxfords Pergamon Press, Oxford, pp 67–109
Carlson BA, Gallant J (2013) From sequence to spike to spark: evo-devo-neuroethology of electric communication in mormyrid fishes. J Neurogenetics 27(3):106–129. doi:10.3109/01677063.2013.799670
Castello ME, Aguilera PA, Trujillo-Cenoz O, Caputi AA (2000) Electroreception in Gymnotus carapo: pre-receptor processing and the distribution of electroreceptor types. J Exp Biol 203(Pt 21):3279–3287
Cheng K (2012) Morphological correlates of signal variation in weakly electric mormyrid fish honors thesis. Cornell University, Ithaca
Czech-Damal NU, Liebschner A, Miersch L, Klauer G, Hanke FD, Marshall C, Dehnhardt G, Hanke W (2012) Electroreception in the Guiana dolphin (Sotalia guianensis). Proc Biol Sci R Soc 279:663–668. doi:10.1098/rspb.2011.1127
Dowling JE (2012) The retina. An approachable part of the brain. Belknap Press of Harvard University Press, Cambridge, MA
Fechler K, von der Emde G (2013) Figure-ground separation during active electrolocation in the weakly electric fish, Gnathonemus petersii. J Physiol Paris 107:72–83, doi: http://dx.doi.org/10.1016/j.jphysparis.2012.03.002
Finger TE, Bell CC, Russell CJ (1981) Electrosensory pathways to the valvula cerebelli in mormyrid fish. Exp Brain Res 42:22–33
Francke M, Kreysing M, Mack A, Engelmann J, Karl A, Makarov F, Guck J, Kolle M, Wolburg H, Pusch R, von der Emde G, Schuster S, Wagner HJ, Reichenbach A (2014) Grouped retinae and tapetal cups in some Teleostian fish: occurrence, structure, and function. Prog Retin Eye Res 38:43–69. doi:10.1016/j.preteyeres.2013.10.001
Franz V (1921) Zur mikroskopischen Anatomie der Mormyriden. Zool Jahrb Abt Allg Zool Physiol Tiere 42:91–146
Harder W (1968) Die Beziehungen zwischen Elektrorezeptoren, elektrischen Organen, Seitenlinienorganen und Nervensystem bei den Mormyridae (Teleostei, Pisces). Z Vergl Physiol 59:272–318
Heiligenberg W (1973) Electrolocation of objects in the electric fish Eigenmannia (Rhamphichthyidae, Gymnotoidei). J Comp Physiol 87:137–164
Hofmann M, Chagnaud B, Wilkens L (2005) Response properties of electrosensory afferent fibers and secondary brain stem neurons in the paddlefish. J Exp Biol 208:4213–4222
Hollmann M, Engelmann J, von der Emde G (2008) Distribution, density and morphology of electroreceptor organs in mormyrid weakly electric fish: anatomical investigations of a receptor mosaic. J Zool 276:149–158
Hopkins CD (2009) Electrical perception and communication. In: Squire L (ed) Encyclopedia of neuroscience, vol 3. Academic, Oxford, pp 813–831
Kreysing M, Pusch R, Haverkate D, Landsberger M, Engelmann J, Ruiter J, Mora-Ferrer A, Ulbricht E, Grosche J, Franze K, Streif S, Schumacher S, Makarov F, Kacza J, Guck J, Wolburg H, Bowmaker JK, von der Emde G, Schuster S, Wagner HJ, Reichenbach A, Francke M (2012) Photonic crystal light collectors in fish retina improve vision in turbid water. Science 336:1700–1703. doi:10.1126/science.1218072
Land MF, Nilsson D-E (2002) Animal eyes. Oxford University Press, Oxford
Landsberger M, von der Emde G, Haverkate D, Schuster S, Gentsch J, Ulbricht E, Reichenbach A, Makarov F, Wagner HJ (2008) Dim light vision – morphological and functional adaptations of the eye of the mormyrid fish, Gnathonemus petersii. J Physiol Paris 102(4–6):291–303. doi:10.1016/j.jphysparis.2008.10.015
Lazar G, Libouban S, Szabo T (1984) The mormyrid mesencephalon. III. Retinal projections in a weakly electric fish, Gnathonemus petersii. J Comp Neurol 230(1):1–12. doi:10.1002/cne.902300102
Lissmann HW, Machin KE (1958) The mechanism of object location in Gymnarchus niloticus and similar fish. J Exp Biol 35(2):451–486
Locket NA (1977) Adaptations to the deep-sea environment. In: Crescitelli F (ed) Handbook of sensory physiology. VII the visual system in vertebrates. Springer Verlag, New York, pp 68–184
McEwan MR (1938) A comparison of the retina of the mormyrids with that of various other teleosts. Acta Zool 19:427–465
Meek J (1983) Functional anatomy of the tectum mesencephali of the goldfish. An explorative analysis of the functional implications of the laminar structural organization of the tectum. Brain Res Rev 6:247–297
Moller P (1995) Electric fishes. History and behavior. Chapman & Hall, London
Moller P, Serrier J, Belbenoit P, Push S (1979) Notes on ethology and ecology of the Swashi river mormyrids (Lake Kainji, Nigeria). Behav Ecol Sociobiol 4:357–368
Mora-Ferrer C, Gangluff V (2002) D2-dopamine receptor blockade modulates temporal resolution in goldfish. Vis Neurosci 19:807–815
Moritz T (2010) Fishes of Iguidi river – a small forest stream in south-east Benin. Ichthyol Explor Freshw 21(1):9–26
Nilsson G (1996) Brain and body oxygen requirements of Gnathonemus petersii, a fish with an exceptionally large brain. J Exp Biol 199(Pt 3):603–607
Northcutt RG, Wullimann MF (1988) The visual system in teleost fishes: morphological patterns and trends. In: Atema J, Fay RR, POpper AN, Tavolga WN (eds) Sensory biology of aquatic animals. Springer, New York, pp 515–552
Nwani CD, Odoh GE, Ude EF, Okogwu OI (2011) Food and feeding habits of Gnathonemus petersii (Osteichthyes: Mormyridae) in Anambra River, Nigeria. Int Aquat Res 3:45–51
Ogbeibu AE, Ezeunara P (2005) Studies on the food composition and feeding pattern of fish communities in the Ikpoba River, Southern Nigeria. J Aquat Sci 20(2):117–129
Okedi J (1965) The biology and habits of the Mormyrid fishes: Gnathonemus longibarbis, G. victoriae, Marcusenius grahami, M. nigricans, Petrocephalus catostoma. J Appl Ecol 2(2):408–409
Pettigrew JD (1999) Electroreception in monotremes. J Exp Biol 202(Pt 10):1447–1454
Prechtl JC, von der Emde G, Wolfart J, Karamursel S, Akoev GN, Andrianov YN, Bullock TH (1998) Sensory processing in the pallium of a mormyrid fish. J Neurosci Off J Soc Neurosci 18(18):7381–7393
Proske U, Gregory JE, Iggo A (1998) Sensory receptors in monotremes. Philos Trans R Soc Lond 353(1372):1187–1198
Pusch R, von der Emde G, Hollmann M, Bacelo J, Nobel S, Grant K, Engelmann J (2008) Active sensing in a mormyrid fish: electric images and peripheral modifications of the signal carrier give evidence of dual foveation. J Exp Biol 211(Pt 6):921–934. doi:10.1242/jeb.014175
Pusch R, Kassing V, Riemer U, Wagner HJ, von der Emde G, Engelmann J (2013a) A grouped retina provides high temporal resolution in the weakly electric fish Gnathonemus petersii. J Physiol Paris 107(1–2):84–94. doi:10.1016/j.jphysparis.2012.06.002
Pusch R, Wagner HJ, von der Emde G, Engelmann J (2013b) Spatial resolution of an eye containing a grouped retina: ganglion cell morphology and tectal physiology in the weakly electric fish Gnathonemus petersii. J Comp Neurol 521(17):4075–4093. doi:10.1002/cne.23397
Ruhl T, Mohr C, von der Emde G (2011) The mesencephalon of a mormyrid – sensory processing during active electrolocation in the weakly electric fish, Gnathonemus petersii. In: 33th Göttingen Neurobiology Conference, Göttingen. pp T17–14C
Rupp B, Wullimann MF, Reichert H (1996) The zebrafish brain: a neuroanatomical comparison with the goldfish. Anat Embryol 194:187–203
Salazar VL, Stoddard PK (2008) Sex differences in energetic costs explain sexual dimorphism in the circadian rhythm modulation of the electrocommunication signal of the gymnotiform fish Brachyhypopomus pinnicaudatus. J Exp Biol 211(Pt 6):1012–1020. doi:10.1242/jeb.014795
Salazar VL, Krahe R, Lewis JE (2013) The energetics of electric organ discharge generation in gymnotiform weakly electric fish. J Exp Biol 216(Pt 13):2459–2468. doi:10.1242/jeb.082735
Scheich H, Langner G, Tidemann C, Coles RB, Guppy A (1986) Electroreception and electrolocation in platypus. Nature 319(6052):401–402. doi:10.1038/319401a0
Schuster S, Amtsfeld S (2002) Template-matching describes visual pattern-recognition tasks in the weakly electric fish Gnathonemus petersii. J Exp Biol 205(Pt 4):549–557
Schwan HP (1963) Determination of biological impedances. In: Nastuk WL (ed) Physical techniques in biological research, vol VI. Academic, New York, pp 323–407
Speakman JR, Ravey PA (1991) No cost of echoloaction for bats in flight. Nature 350:421–423
Stoddard PK, Salazar VL (2011) Energetic cost of communication. J Exp Biol 214(Pt 2):200–205. doi:10.1242/jeb.047910
Stürmer CAO, Easter SSJ (1984) A comparison of the normal and regenerated retinotectal pathways of goldfish. J Comp Neurol 223:57–76
Szabo T, Moller P (1984) Neuroethological basis for electrocommunication. In: Bolis C, Keynes RD, Maddrell SHP (eds) Comparative physiology of sensory systems. Cambridge University Press, Cambridge, pp 455–474
Szabo T, Wersäll J (1970) Ultrastructure of an electroreceptor (Mormyromast) in a mormyrid fish, Gnathonemus petersii. II. J Ultrastruct Res 30:473–490
Vanegas H, Ito H (1983) Morphological aspects of the teleostean visual system: a re-view. Brain Res Rev 6:117–137
von der Emde G (1990) Discrimination of objects through electrolocation in the weakly electric fish, Gnathonemus petersii. J Comp Physiol A 167:413–421
von der Emde G (1993) Capacitance discrimination in electrolocating, weakly electric pulse fish. Naturwissenchaften 80:231–233
von der Emde G (2011) Remote electrical sensing: detection and analysis of objects by weakly electric fishes. In: Barth F, Humphrey J, Srinivasan M (eds) Frontiers in sensing. From biology to engineering. Springer, Wien, pp 313–326
von der Emde G, Bleckmann H (1992a) Differential responses of two types of electroreceptive afferents to signal distortions may permit capacitance measurement in a weakly electric fish, Gnathonemus petersii. J Comp Physiol A 171:683–694
von der Emde G, Bleckmann H (1992b) Extreme phase sensitivity of afferents which innervate mormyromast electroreceptors. Naturwissenchaften 79:131–133
von der Emde G, Bleckmann H (1997) Waveform tuning of electroreceptor cells in the weakly electric fish, Gnathonemus petersii. J Comp Physiol A 181:511–524
von der Emde G, Bleckmann H (1998) Finding food: senses involved in foraging for insect larvae in the electric fish, Gnathonemus petersii. J Exp Biol 201:969–980
von der Emde G, Engelmann J (2011) Active electrolocation. In: Farrell A (ed) Encyclopedia of fish physiology: from genome to environment, vol 1. Academic, San Diego, pp 375–386
von der Emde G, Fetz S (2007) Distance, shape and more: recognition of object features during active electrolocation in a weakly electric fish. J Exp Biol 210(Pt 17):3082–3095. doi:10.1242/jeb.005694
von der Emde G, Ringer T (1992) Electrolocation of capacitive objects in four species of pulse-type weakly electric fish. I. Discrimination performance. Ethology 91:326–338
von der Emde G, Ronacher B (1994) Perception of electric properties of objects in electrolocating weakly electric fish: two-dimensional similarity scaling reveals a City-Block metric. J Comp Physiol A 175:801–812
von der Emde G, Schwarz S (2001a) Detection of electric signals in jawed fishes. In: Kapoor BG (ed) Sensory biology of jawed fishes – new insights. Science Publishers, Enfield, pp 161–180
von der Emde G, Schwarz S (2001b) How the electric fish brain controls the production and analysis of electric signals during active electrolocation. Zoology 103:112–124
von der Emde G, Schwarz S (2002) Imaging of objects through active electrolocation in Gnathonemus petersii. J Physiol Paris 96(5–6):431–444. doi:10.1016/S0928-4257(03)00021-4
von der Emde G, Amey M, Engelmann J, Fetz S, Folde C, Hollmann M, Metzen M, Pusch R (2008) Active electrolocation in Gnathonemus petersii: behaviour, sensory performance, and receptor systems. J Physiol Paris 102(4–6):279–290. doi:10.1016/j.jphysparis.2008.10.017
von der Emde G, Behr K, Bouton B, Engelmann J, Fetz S, Folde C (2010) 3-dimensional scene perception during active electrolocation in a weakly electric pulse fish. Front Behav Neurosci 4:26. doi:10.3389/fnbeh.2010.00026
Wagner H-J (2007) Bipolar cells in the “grouped retina” of the elephantnose fish (Gnathonemus petersii). Vis Neurosci 24(3):355–362
Wehner R (1987) “Matched filters” – neural models of the external world. J Comp Physiol A 161:511–531
Wilkens L, Hofmann M (2005) Behavior of animals with passive, low-frequency electrosensory systems. In: Bullock T, Hopkins C, Popper A, Fay R (eds) Electroreception. Springer, New York, pp 229–263
Wullimann MF (1998) The central nervous system. In: Evans DH (ed) The physiology of fishes, 2nd edn. CRC Press, Boca Raton, pp 245–282
Wullimann MF, Northcutt RG (1990) Visual and electrosensory circuits of the diencephalon in mormyrids: an evolutionary perspective. J Comp Neurol 297:537–552
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this chapter
Cite this chapter
von der Emde, G., Ruhl, T. (2016). Matched Filtering in African Weakly Electric Fish: Two Senses with Complementary Filters. In: von der Emde, G., Warrant, E. (eds) The Ecology of Animal Senses. Springer, Cham. https://doi.org/10.1007/978-3-319-25492-0_9
Download citation
DOI: https://doi.org/10.1007/978-3-319-25492-0_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-25490-6
Online ISBN: 978-3-319-25492-0
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)