
Abstract
The occurrence of severe floods in recent years globally as well as in many parts of Malaysia is an indication of both climate change and human interference in land use change. This requires for an integrated flood risk management approach and a shift from conventional structural flood mitigation. Flood modelling is an important part of flood risk management. In this study, development of one dimensional (1D) hydrodynamic model for Pahang River was performed in HEC-RAS 5.0 using combinations of surveyed data with spatial-extracted cross sections and recorded stream flow. The study area had been hit by several extreme floods that caused substantial property damages and loss of lives. This study focusses on the recent 2007 and 2014 flood events. Analyses of water levels, stream discharges and river cross sections were carried out based on the data gathered. A set of flood levels were obtained as the outputs of the hydraulic model and the accuracy of the simulated flood levels were validated. It was found that the model predicts a good output agreement with \(R^{2}\) = 0.96 and \(R^{2}\) = 0.82 for the 2007 and 2014 flood events respectively.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Recent flood event in Japan (28 June 2018–9 July 2018) that claimed 225 lives [23] illustrates the massive impact of this natural disaster even to a developed country. In Malaysia, historical flood events such as those experienced across Peninsular Malaysia in 1926 (entire Peninsular Malaysia), 1971 (Kuala Lumpur) [8], 2006, 2007 (Johor and Pahang River basin), major flood in December 2014 in East Coast of Peninsular Malaysia and more recently 2017 flood events in the states of Kelantan, Terengganu and Penang [10], highlighted the serious hazards posed by flooding in this country. These large-scale events severely impacted public infrastructures with the worst hit sectors being transportation and housing, especially those that encroached into the floodplain [19]. Moreover, the indirect impacts of this natural disaster are far more damaging to the household [9]. More importantly, it should be noted that these flood damages tend to increase in the future as floodplains become more densely built-up over time and climate change exacerbates the occurrence of the large floods. Flood loss is also expected to increase as the result of uncontrolled urbanization, inadequate drainage and siltation due to land clearing [6, 22].
It is estimated about 33 298 km2 of Malaysia is flood-prone, affecting 21% of the population based on a report from Department of Irrigation and Drainage (DID) Malaysia [15]. The damage by the floods caused the Government to spend on average an annual flood damage at RM 915 million, estimated by National Register of River Basin study [14] while more than RM 3 billion was spent on structural measures to mitigate flooding since 1971 despite the fact that these structural measures seem to fail to overcome the damage caused by the floods [18]. These experiences indicate that structural flood control is only partially effective, and integrated flood management involving not only structural but also non-structural flood control planning is necessary [20]. Besides, non-structural measures are easier to implement, less expensive and community friendly [9].
Besides implementing sustainable urban drainage systems [11, 29], one of the many non-structural flood management approaches is flood modelling. It involves simulation of flood events in a computer to predict the peak water level and further possible inundation area of the study area. It is the first step towards understanding and managing flood behavior. Flood modelling is a major component in integrated flood risk management providing information on flood water level forecast, guidance for property-level responses, assessment of floodplain zone through flood mapping and assesses the benefit of natural flood management options. This study focusses on performing one dimensional (1D) hydrodynamic modelling of a large-scale river of Pahang River for the extreme event of 2007 and 2014 flood. These two events were the biggest flood events occurred in Pahang post-2000 [26]. The hydrological data of both events were well recorded by the Department of Irrigation and Drainage (DID), hence, suitable to be analysed in a simulation. The simulated flood event output is then validated with observed historical data and eventually to show the high flood level predicted by a hydraulic model software, HEC-RAS, along the Pahang River that can be used for the preparation of flood risk map.
2 Study Area
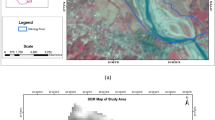
The Pahang River is located in the eastern part of Peninsular Malaysia (Fig. 1). This river lies within Pahang state and is the longest river in Peninsular Malaysia with a length of about 440 km and a catchment area of 29,000 km2. It originates from the confluence of the Jelai and Tembeling rivers as the two major tributaries of this river system. Flowing south from upstream of Kuala Tembeling, the river passes major towns of Kuala Kerau and Temerloh. Then the river system turns almost perpendicularly at Mengkarak and continue to flow eastward through Chenor, Maran, and the royal town of Pekan before discharging into the South China Sea. The basin has an annual rainfall of about 2170 mm and experienced heavy rainfall during the North-East monsoon season from October to January. The mean discharge of the river is 596 m3/s measured at Lubok Paku [2] which can be up to 5000 m3/s during the wet monsoon season with highest recorded discharge of 9300 m3/s during the massive 2014 flood.

Pahang river basin
Over the years, the Pahang River has recorded some extreme flood events. Among them is the historical January 1971 flood event. This flood was a 100-year annual recurrence interval (ARI) event that claimed 24 people lives and severely damaged the state’s economy and communities with monetary losses estimated at USD38 million [1]. In December 2007, another major flood event inundated Lubok Paku, Temerloh and Pekan towns with a depth of up to 2 m [2]. This unfortunate event also recorded 8 casualties with overall flood damage estimated at USD86 million or RM 263 at that time. A more recent flood event in December 2014 that hit the North East of Peninsular Malaysia, particularly Pahang, recorded one of the worst flood disasters in the history of the country. This event that occurred during the Northeast monsoon season brings extreme heavy rainfall to the Pahang River catchment reaching up to 500 mm in 24 h [12]. The major towns in Temerloh and Pekan suffered significant property damage where 33,225 victims were evacuated and 3 deaths recorded in Pahang [5]. Summary of recorded flood events near Pahang River from the year 1926–2014 is presented in Table 1.
3 Overview of HEC-RAS
HEC-RAS is a hydraulic model designed by the US Corporation Engineers Hydraulic Engineering Centre to model river flow [7]. It is a well-established and well-tested model globally and sometimes used as benchmarked against the performance of other hydrodynamic model simulation software [30]. HEC-RAS allows users to estimate water surface profile along a river in a steady and unsteady flow river hydraulic calculation including sediment transport modelling. Energy and momentum equation (Eqs. 1 and 2) are used to derive 1D Saint Venant equation in solving steady and unsteady state flow water surface profile simulation within HEC-RAS using implicit finite different method [30].
where \(A\) is the cross-sectional area, \(t\) is the time, \(S\) is the ineffective flow area, \(Q\) is the discharge, \(q\) is the inflow per unit area, \(x\) is the distance along the channel, \(V\) is the velocity, \(z\) is the elevation, \(S_{f}\) is the friction slope and \(g\) is the gravitational acceleration.
The unsteady flow simulation component in HEC-RAS modelling system is capable of simulating 1D unsteady flow through a full network of open channels. In this study, HEC-RAS version 5.0 is used to model two flood events of a large-scale river. This current version of HEC-RAS gains new ability to perform 2D hydrodynamic modelling and an interesting flood inundation mapping tool directly within HEC-RAS 5.0 through RAS Mapper which reduces the flood mapping dependency on ArcGIS.
4 One-Dimensional Hydrodynamic Modelling
A good hydraulic model requires a good geometry and flow data input. However, the goodness of the simulations are also affected by model type, i.e. one dimensional (1D), two dimensional (2D) or combined (1D/2D) types. 1D model is widely used to simulate flow in the main river channel and in certain cases very effective in predicting flood extent [28]. 1D modelling also shows computational efficiency and simple parameterization in dealing with flows in large and complex networks [4]. However, this simple model has some drawbacks when simulating two-dimensional flow path in a large floodplain. In short, 1D model has limited application but is economical, robust, provides valuable information on water profile properties and is a popularly preferred alternative as long as the flow paths can be identified [4, 21].
The advance ability of almost all current hydraulic model to perform 2D hydrodynamic modelling is replacing 1D hydraulic models in many applications. 2D modelling approach describes a good floodplain flow performance but requires a significant amount of data and not suitable for short timescale and lack of floodplain geometry data condition [1]. However, with the advance of remote sensing technology today, high-resolution topographic data can be generated to represent accurate floodplain geometry data derived from satellite imagery, though, the presence of this high-resolution data is still scarce in poor and developing countries. The most current approach in flood modelling, however, is the combined 1D/2D model where a 1D treatment is applied to the main channel and a 2D treatment of the floodplain. Integrating 1D/2D model in urban flood modelling was found to be efficient but the application depends largely on high-resolution data availability.
The performance of 1D modelling in the hydraulic simulation is tested by numbers of studies such as Horritt and Bates [16] who concluded that 1D model is capable of giving a good estimation of flood level and travel time, and can be used for prediction of flood extent. In another study, Timbadiya et al. [27] studied the 1D hydrodynamic model using MIKE 11 for two flood events and proposed that the flood level predicted was computationally satisfactory from root mean square error validation. Pramanik et al. [25] simulated 1D model of Brahmani river using geometry from a combination of surveyed and digital elevation model (DEM) extracted data using MIKE 11 model while Patel et al. [24] executed the 1D model for an 11 km of lower part of Ambica River with 359 surveyed channel cross-section inputs that both highlighted the importance of accurate geometry data in 1D hydrodynamic model. These studies confirm the cost-effective, reduced complexity and reliable prediction of water level along the river of the 1D model. In this paper, 1D modelling approach was applied as a preliminary study to validate the base model and ability of HEC-RAS 5.0 in simulating extreme event of the large-scale river before advancing towards combined 1D/2D modelling as further complex modelling.
5 Methodology
In general, one-dimensional flood modelling involves three main phases beginning with hydrological modelling, hydraulic modelling and eventually flood level and flood inundation analysis as describes in Fig. 2. Hydrological model is required to convert historical storm event to runoff and eventually determine the input stream inflow for hydraulic modelling. However, for a gauged catchment, recorded stream flow can be used directly as inflow input and upstream boundary condition to perform hydraulic modelling. The hydraulic simulation will eventually provide a predicted water level based on input flow data and this result can be used further for flood level and flood inundation analysis.

Flood modelling phase structure
This study begins with the determination of the study area and data acquisition. Geometrical and hydrological information were mostly obtained from existing available data from government agencies and historical flood reports and is explained in detail in the next subsection. Data processing work phases within HEC-RAS 5.0 model is described in this paper including the base model preparation and input parameter for hydraulic modelling. The model outputs are then analysed and validated with observed flood event data. Results are provided in figures and tables followed by relevant discussions to better explain the findings of this study.
5.1 Data Collection
The required data are obtained through field survey, previous research report, remote sensing, digitalized vector data and departmental agencies. Table 2 provides the most critical data and information required for the analysis. River cross sections, structures and part of floodplain areas were obtained from survey works done by Department of Irrigation and Drainage (DID). The survey work produced 99 cross sections along the Pahang River. As a large river, the obtained cross sections are not sufficient to run an efficient hydraulic modelling as a 1D model strongly depends on geometric data as the main parameter and a key to reliable simulation. Therefore, additional cross sections were extracted from DEM and combined together with the surveyed cross sections as a linked river network. The DEM used is freely available from United States Geological Survey (USGS) website. Final work of DEM extraction geometry together with DID geometry results in 450 cross sections along Pahang River altogether to be simulated in HEC-RAS.
The recorded stream flow of the extreme events was obtained from the DID hydrological gauge stations as unsteady flow input in HEC-RAS. A total of four DID gauge stations discharge and water level at Kuala Tembeling, Temerloh, Lubok Paku and Pekan were obtained for the year 2007 and 2014. The stations and locations of the flow data are listed in Table 3. In compensation of data scarcity, missing data for corresponding periods were generated through correlation. Other data such as actual flood level observation, inundation area, and damage loss and were acquired through flood reports and related research articles.
5.2 Hydrodynamic Modelling in HEC-RAS
The hydraulic modelling in HEC-RAS starts with data management. In this phase, geographic features in the real world are represented as through GIS operations of spatial registration and georeferencing. This process optimizes the information calibration and collation processes and also preserve the intrinsic properties of the studied geographic feature in the real world [17]. The GIS processes were completed within RAS Mapper in HEC-RAS 5.0. Next is the data input phase. Spatial geometrical inputs of the river network were first added to the model. The spatial input data includes a DEM of the watershed, cross-section river geometry, channel and floodplain surface roughness in terms of Manning’s roughness coefficient.
Cross section from the survey and extracted DEM used as main geometric data for executing the hydraulic model. In the geometric window, a river network was created from a total of 450 added cross section geometries linked to each other from upstream to downstream (Fig. 3). The river profiles were assigned with specific Manning’s roughness coefficient (\(n\)). The \(n\) value describes the resistance to flow and was assigned based on standard reference suggested by Chow [13]. Manning’s \(n\) for 1D HEC-RAS model was limited to one value for channel and two values for floodplain.

a HEC-RAS geometry schematic for Pahang river network scheme from CH 205000–CH 108000; b cross section profile near Pekan station (CH 9000) in HEC-RAS
Unsteady flow data is then imported into HEC-RAS as a boundary condition for the HEC-RAS in order to model the real historical event. In this study, recorded upstream stream flow data at Kuala Tembeling for 2007 and 2014 flood event were assigned as the upstream boundary condition to the river model and normal depth was set as the downstream boundary condition. Simulation time in HEC-RAS must be synchronized with the flow data. At this stage, HEC-RAS had acquired everything the model needed to perform the hydrodynamic modelling. The final simulation process was to compute the unsteady flow model in the ‘Run’ windows. During the computation, 1D model HEC-RAS characterized the flow as unsteady, with the flow moving in a downstream direction (1D) and the provided cross section as the whole characterization of the river environment [30].
Two extreme high discharge event simulations were performed in this study and the outputs were analysed. Calculated flow discharge at the downstream boundary for both events was fitted to the observed discharge to validate the simulation. High discrepancy result would suggest that the base model parameter should be fixed using sensitivity analysis where the simulated discharge is fitted to the observed discharge by optimization of Manning’s \(n\). In this study, the calibration values of \(n\) that gave the best agreement between observed and simulated result were equal to 0.05 for the main channel and 0.06 for the floodplain confirming the results from the previous study by Ab. Ghani et al. [3]. General procedure of 1D hydrodynamic modelling in HEC-RAS is simplified in Fig. 4.

Hydrodynamic modelling in HEC-RAS
6 Results and Discussions
The 2007 and 2014 event simulations were validated with actual data. Goodness of agreement between the two data sets was determined. Eventually, the flood level analysis is presented.
6.1 Simulated and Observed Flow Discharge Validation
The 1D HEC-RAS model was calibrated according to Manning’s \(n\) values for both the channel and the floodplain. Validations took place against the flow discharge in the downstream end of the study river segment. The simulated and actual stream discharge for the 2007 and 2014 flood events can be observed in Fig. 5. From the figure, the simulated downstream peak discharge of the 2007 flood event was 4980 m3/s occurring on 15th December while the 2014 flood event simulation predicted flood peak discharge of 8925 m3/s on 31st December. The agreement of the model with observed downstream discharge data at Pekan DID station (ID 3434401) was then analysed.

Validation of downstream flow discharge for a 2007 flood event and b 2014 flood event
The good agreement between the observed water level and model simulation result was determined by the coefficient of determination (\(R^{2}\)). A value of 1 indicates a good simulation representation of the actual event discharge (Eq. 3).
where \(y_{i}\) = actual data at ith value, \(\hat{y}_{i}\) = simulated result at ith value, \(n\) = total number of data, \(\bar{y}\) = mean value of \(n\) data. The 2007 extreme event validation give the coefficient of determination (\(R^{2}\)) values of 0.96 and for 2014 validation event, the \(R^{2}\) estimated is at 0.82. The validation performance of the 1D model was sufficiently adequate. The comparison of simulated and observed discharge at DID Pekan station performance analysis is summarised in Table 4.
6.2 Simulated Water Surface Elevation Analysis
The hydrodynamic flood modelling for the Pahang River in the present study was performed using the HEC-RAS version 5.0.3 for one-dimensional steady flow analysis. The energy equation, using the standard step method, solved the steady flow, while Manning’s equation and the contraction and expansion coefficients determined head losses. Eventually, analysis of river cross sections’ behaviour under various flood discharges and water surface profiles for Pahang River was carried out.
The integrative water surface profile simulation output for 2007 and 2014 events indicated that there is an irregularity in the flow behaviour of the river as can be seen in Fig. 6. This figure plotted the simulated longitudinal water surface elevation profiles for 2007 and 2014 with the observation of the danger level at DID stations. The danger level is an indicator when the water level in the river is as high as the riverbank and water may burst the bank and flooding will likely to occur. When the water level exceeds the danger level, flooding occurs. The simulated water surface elevation in Fig. 6 was plotted using output during the occurrence of peak discharge which was on 16th December for 2007 event and on 31st December for 2014 event.

Pahang river maximum longitudinal water surface elevation profile
From the HEC-RAS 1D modelling, a set of flood levels were obtained at respective cross sections as the output of the hydraulic model. Further details of simulated maximum water level at four DID gauge stations namely, Kuala Tembeling, Temerloh, Lubok Paku and Pekan for 2007 and 2014 flood events are shown in Fig. 7 with a comparison of DID danger level. From this figure, it can be seen that the water level of simulated 2007 and 2014 flood events exceeded the danger level and riverbank elevations indicating the occurrence of the flood at the Temerloh, Lubok Paku and Pekan stations complying with Fig. 6. For the 2007 flood event, the water level exceeded the danger level at Temerloh, Lubok Paku and Pekan stations by 0.6 m, 1.3 m and 3.2 m respectively. The 2014 event simulation shows higher water surface elevation with water level also exceeding the danger level at Temerloh, Lubok Paku and Pekan stations where the average flood level was from 2 to 8.3 m.

Water surface elevation of simulated flood event at DID stations a Kuala Tembeling (CH 285000), b Temerloh (CH 189000), c Lubok Paku (CH 105000), d Pekan (CH 9000)
Table 5 summarises the output water level at each DID station along Pahang River for both flood events. It should be noted that the model predicts higher water surface elevation compared to an actual flood event for both scenarios. For instance, at chainage 28,500 (Kuala Tembeling station), the simulated flood level seems to be higher than observed water level. The value contradiction with the actual observation may be due to simulation error by HEC-RAS when initial condition input is not sufficient to stabilize the simulation at upstream reach. It could also indicate the limitation of 1D hydrodynamic modelling in predicting water level with significant floodplain role in the event. However, with good agreement obtained from Table 4, the model was sufficient to illustrate flood condition along Pahang River for the 2007 and 2014 flood events. The model accuracies could be improved such as modelling in 2D or combined 1D/2D and considering the debris in flood water.
7 Conclusion
The model developed predicts water levels along the river reach from Jerantut through Pekan district and eventually to the river mouth which the total length of the reach is almost 450 km illustrating the ability of HEC-RAS 5.0 to simulate 1D hydrodynamic of a large scale river. Flood studies of the year 2007 and 2014 were used to validate the results obtained from the simulation. The comparison of the simulation output with actual observed data leads to a satisfactory result as analysed and shown in Table 4. Further improvement can be made by considering channel and floodplain morphological changes.
By considering the past flood events, it is strongly recommended to improve the carrying capacity of Pahang River which will help to minimise the flood risk. Based on the above study and analysis, it is recommended that the sections which overtop over the existing embankment to be protected by bund along the river bank. Details of the proposed bund would require further study.
References
Ab. Ghani A, Chang CK, Leow CS, Zakaria NA (2012) Sungai Pahang digital flood mapping: 2007 flood. Int J River Basin Manag 10(2):139–148
Ab. Ghani A, Chang CK, Siang LC, Zakaria NA, Hassan ZA (2011) Digital flood mapping: case study of 2007 Sungai Pahang flood. Final report, USM Research University Grant
Ab. Ghani A, Zakaria NA, Chang CK, Ariffin J, Abu Hasan Z, Abdul Ghaffar AB (2007) Revised equations for manning’s coefficient for sand-bed rivers. Int J River Basin Manag 5(4):329–346
Ahmad B, Hassan ZA (2011) Flood map of Tupai River using combined 1D and 2D modelling. In: 3rd international conference on managing rivers in the 21st century: sustainable solutions for global crisis of flooding, pollution and water scarcity, Penang, Malaysia
Akasah ZA, Doraisamy SV (2015) 2014 Malaysia flood: impacts and factors contributing towards the restoration of damages. J Sci Res Dev 2(14):53–59
Azad WH, Brown E, Osman S, Asan G, Osman AQ, Samsudin RK, Boelee L, Ahmad F (2017) Flood forecasting and warning for Muar River: non-structural measures for flood mitigation. In: 37th IAHR world congress, 2017 Kuala Lumpur, Malaysia
Brunner GW (2016) HEC-RAS: river analysis system user’s manual version 5.0. http://www.hec.usace.army.mil/software/hec-ras/downloads.aspx
Chan NW (1995) A contextual analysis of flood hazard management in Peninsular Malaysia. Unpublished Ph.D. thesis, Middlesex University, UK
Chan NW (2012) Impacts of disasters and disasters risk management in Malaysia: the case of floods. ERIA research project report 2011–8, Jakarta
Chan NW, Roy R, Lai CH, Tan ML (2018) Social capital as a vital resource in flood disaster recovery in Malaysia. Int J Water Resour Dev 35(4):619–637. https://doi.org/10.1080/07900627.2018.1467312
Chan NW, Tan ML, Ab Ghani A, Zakaria NA (2019) Sustainable urban drainage as a viable measure of coping with heat and floods due to climate change. In: 9th international conference on future environment and energy, Osaka, Japan
Chang CK (2018) Simulation of flood inundation map associated with sediment transport for Sungai Pahang. Ph.D. thesis, Universiti Sains Malaysia
Chow VT (1959) Open channel hydraulics. McGraw-Hill Book. Co, Inc., New York, NY
Department of Irrigation and Drainage (DID) Malaysia (2003) Guidelines and procedure for the assessment of flood damage in Malaysia
Department of Irrigation and Drainage (DID) Malaysia (2012) Updating of condition of flooding and flood damage assessment in Malaysia
Horritt M, Bates P (2002) Evaluation of 1D and 2D numerical models for predicting river flood inundation. J Hydrol 268(1–4):87–99
Hussein RAA (2010) Flood hazard and risk assessment through incorporating GIS with hydrodynamic modelling: case study of Muda River. Ph.D. thesis, Universiti Sains Malaysia
Jafri AM, Hashim Z, Kavvas ML, Chen ZQ, Ohara N (2013) Development of atmospheric based flood forecasting and warning system for selected river basins in Malaysia
Julien PY, Ab. Ghani A, Zakaria NA, Abdullah R, Chang CK (2010) Case study: flood mitigation of the Muda River, Malaysia. J Hydraul Eng 136(4):251–261
Kubal C, Haase D, Meyer V, Scheuer S (2009) Integrated urban flood risk assessment—adapting a multicriteria approach to a city. Nat Hazards Earth Syst Sci 9(6):1881–1895
Leow CS, Abdullah R, Zakaria NA, Ab. Ghani A, Chang CK (2008) Modelling urban river catchment: a case study in Malaysia. Proc Inst Civ Eng Water Manag 162(1):25–34
Maruti SF, Amerudin S, Kadir WHW, Rahman MZA, Yusof ZM, Ariffin A, Huey TT (2016) Hydrodynamic modelling of a proposed Lebir and Galas Dam for flood hazard analysis. Malays J Civ Eng 28(3):223–239
Ogura J, Berlinger J (2018) Japan floods: death toll rises to 200 as UN offers assistance. In: CNN (ed) CNN
Patel SB, Mehta DJ, Yadav SM (2018) One dimensional hydrodynamic flood modeling for Ambica River, South Gujarat. J Emerg Technol Innov Res 5(4):595–601
Pramanik N, Panda RK, Sen D (2010) One dimensional hydrodynamic modeling of river flow using DEM extracted river cross-sections. J Water Resour Manag 24(5):835–852
Shah SMH, Mustaffa Z, Yusof KW (2017) Disasters worldwide and floods in the Malaysian Region: a brief review. Indian J Sci Technol 10(2)
Timbadiya PV, Patel PL, Porey PD (2014) One-dimensional hydrodynamic modelling of flooding and stage hydrographs in the lower Tapi River in India. Curr Sci 106(5):708–716
Vozinaki A-EK, Morianou GG, Alexakis DD, Tsanis IK (2016) Comparing 1D and combined 1D/2D hydraulic simulations using high resolution topographic data a case study of the Koiliaris basin. Greece Hydrol Sci J 62(4):642–646
Zakaria NA, Ab. Ghani A, Abdullah R, Sidek LM, Ainan A (2003) Bio-ecological drainage system (BIOECODS) for water quantity and quality control. Int J River Basin Manag 1(3):237–251
Zellou B, Rahali H (2016) Assessment of reduced-complexity landscape evolution model suitability to adequately simulate flood events in complex flow conditions. Nat Hazards 86(1):1–29
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Zainalfikry, M.K., Ab Ghani, A., Zakaria, N.A., Chan, N.W. (2020). HEC-RAS One-Dimensional Hydrodynamic Modelling for Recent Major Flood Events in Pahang River. In: Mohamed Nazri, F. (eds) Proceedings of AICCE'19. AICCE 2019. Lecture Notes in Civil Engineering, vol 53. Springer, Cham. https://doi.org/10.1007/978-3-030-32816-0_83
Download citation
DOI: https://doi.org/10.1007/978-3-030-32816-0_83
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-32815-3
Online ISBN: 978-3-030-32816-0
eBook Packages: EngineeringEngineering (R0)