
Abstract
Pygmy marmosets (Cebuella pygmaea) are the smallest representatives of the Callitrichidae and are characterized by morphological correlates to extensive exudativory and to frequent claw climbing, clinging, quadrupedalism, and leaping on vertical supports. This morpho-behavioral complex is unique and crucial for understanding the evolutionary history of the family. I studied the positional behavior and habitat use of a group of pygmy marmosets in a terra-firme rainforest in Amazonian Ecuador. During the study period, the pygmy marmosets confined their movements to the understory of a dense liana forest, where they largely utilized lianas and tree trunks, showing a strong preference for the latter. In addition, they extensively used and preferred supports > 10 cm in diameter, and almost two thirds of these supports were vertical. Feeding bouts (finding, manipulating, and eating plant foods) on exudates and foraging (finding, manipulating, and eating arthropod prey) occurred at around 5 m above ground. The dominant feeding posture was claw clinging on vertical trunks. In contrast, the dominant foraging postures were quadru-tripedal stand and cantilever, with extensive use of small and medium sized lianas. Traveling occurred lower to the ground than did foraging or feeding, and locomotion was dominated by claw climbing and terminal leaping, and low proportions of quadrupedal activities and vertical leaps. Claw climbing was mainly used for movements within trees, while the other forms of locomotion were used for crossing between trees. Landing support use was similar for both short and long terminal leaps. However, both short and long vertical leaps initiated from and ended on larger supports more frequently than terminal leaps. In addition, long vertical leaps were initiated on larger supports than were shorter vertical leaps. Field observations show that pygmy marmosets use claw climbing, claw clinging, and vertical supports more than any other callitrichid, but they use less leaping and vertical leaping than Callimico. In general, these positional data are not entirely coupled with morphological predictions for pygmy marmosets, but likely reflect adaptations that evolved recently within the evolutionary radiation of callitrichids.
Resumen
Las marmosetas pigmeas (Cebuella pygmea) son los representantes más pequeños de los Callitrichidae y están caracterizados por sus correlaciones morfológicas de alimentación extensiva de exudados y de frecuentes ascensos y agarres con garras, cuadrupedalismo y saltos sobre soportes verticales. Este complejo morfológico-conductual es único y crucial para comprender la historia evolutiva de la familia. Yo estudié el comportamiento postural y el uso del hábitat de un grupo de marmosetas pigmeas en la selva de terra-firme en la Amazonia del Ecuador. Durante el periodo de estudio, las marmosetas pigmeas limitaron sus movimientos en el sotobosque de un denso bosque de lianas, en donde utilizaron principalmente lianas y troncos de árboles, mostrando una fuerte preferencia por estos últimos. Adicionalmente, utilizaron y prefirieron soportes > 10 cm de diámetro, siendo verticales casi dos tercios de estos soportes. Los episodios de alimentación de exudados y de forrajeo (encontrando, manipulando y comiendo presas de artrópodos) ocurrieron a una altura aproximada de 5 m del suelo. La postura dominante de alimentación fue el agarre con garras de troncos verticales. En contraste, la postura dominante de forrajeo fue el postura cuadru-trípeda y voladiza, con uso extensivo de lianas de tamaño pequeño y mediano. El desplazamiento ocurrió más cerca al suelo que el forrajeo o la alimentación y la locomoción estuvo dominada por el asenso con garras y saltos terminales, así como por proporciones bajas de actividades cuadrúpedas y saltos verticales. El asenso con garras fue usado principalmente en el movimiento dentro del mismo árbol, mientras que las otras formas de locomoción se usaron para cruces entre los árboles. El uso de soportes de aterrizaje fue similar para saltos terminales tanto cortos como largos. Sin embargo, los saltos verticales cortos y largos, iniciaron y terminaron en soportes más grandes con mayor frecuencia que los saltos terminales. Adicionalmente, los saltos verticales largos también se iniciaron en soportes más grandes que los saltos verticales cortos. Observaciones de campo muestran que las marmosetas pigmeas utilizan el ascenso con garras, el agarre con garras y los apoyos verticales más que cualquier otro calitrícido, pero utilizan menos saltos y saltos verticales que Callimico. En general, estos datos posturales no están enteramente acoplados con las predicciones morfológicas para las marmosetas pigmeas, pero posiblemente reflejan adaptaciones que evolucionaron recientemente dentro de la radiación evolutiva de los calitrícidos.
Resumo
Sagüis-leãozinho (Cebuella pygmaea) são os menores representantes dos Callitrichidae e são caracterizados por terem uma morfologica correlata à sua extensiva exudativoria e ao frequente uso das garras para subir, agarrar, locomoção quadrupedal e salto em suportes verticais. Este complexo morfo-comportamental é único e crucial para entendermos a história evolutiva da família. Eu estudei o comportamento postural e uso do habitat de um grupo de sagüis-leãozinho na floresta de terra firme da Amazônia Equatoriana. Durante o periodo de estudo, os sagüis leãozinho confinaram seus movimentos na parte mais baixa da floresta de liana densa, onde eles usaram amplamente as lianas e os troncos de árvores, mostrando uma forte preferência pelos últimos. Mais ainda, eles usaram extensivamente e preferencialmente suportes > 10 cm de diâmetro, e quase dois terços destes suportes eram verticais. A alocação de tempo à alimentação (procura, manipulação e predação de artópodos) ocorreu cerca de 5 m acim a do solo. A postura de alimentação dominante foi qaudru-tripedal em pé e “cantilever,” com extensivo uso de lianas de pequeno e médio porte. A movimentação ocorreu mais abaixo e próxima ao solo do que o forrageamento ou alimentação e a locomoção foi dominada por subidas com garras e saltos terminais, e baixa proporção de atividades quadrupedais e saltos verticais. Subindo com garras foi principalmente utilizado em movimentos em cada árvore individualmente, enquanto as outras formas de movimentação foram usadas para atravessar entre árvores. O uso de suporte de aterragem foi similar tanto para saltos longos como curtos. Entretanto, tanto saltos curtos como longos na vertical iniciaram e terminaram em suportes maiores do que os saltos terminais. Adicionalmente, saltos verticais mais longos foram iniciados em suportes mais largos mais frequentemente do que saltos terminais. Observações de campo mostram que os sagüis-leãozinho usam as garras para subir e agarrar nos troncos, e suportes verticais mais do que qualquer outro callitriquídeo, mas usam menos saltos horizontais e verticais do que Callimico. Em geral, estes dados de postura corporal não são inteiramente congruentes com as previsões morfologicas para sagüis-leãozinho, mas provavelmente refletem adaptações que evoluiram recentemente dentro da radiação evolutiva dos calitriquídeos.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Callitrichids are the most diminutive of all living anthropoids, ranging from the smallest of the group, the pygmy marmosets, Cebuella pygmaea, at 150 g, to the largest of the group, the golden lion tamarins, Leontopithecus spp., at 700 g (Garber 1992). All these New World anthropoids are small bodied, have claw-like nails or tegulae, have lost or reduced the hypocone on maxillary molars, have lost or reduced the mandibular and maxillary third molars, and frequently have twins (Garber 1992). These morphological traits are partly shared by callimicos (Callimico goeldii) that are now considered to be part of the same family, with close ties to marmosets (Neusser et al. 2001; Porter and Garber 2004; Cortés-Ortiz Chap. 1 this volume). This suite of characters was once considered to be primitive for anthropoids (Hershkovitz 1977), but recent investigations have suggested that the aforementioned traits, along with a high ratio of fetal weight to maternal body weight, represent derived traits and are the result of phyletic dwarfism and the constraints of small body size on diet, foraging patterns, and reproductive success (Rosenberger 1977; Ford 1980, 1986).
Callitrichids have species-specific differences in dental morphology, body size, and diet, but all are distinguishable from other anthropoids by their ability to claw climb, cling, and leap from and to large vertical supports, behaviors that enable them to exploit food sources such as tree exudates and bark dwelling insects. Clawed positional modes are used less frequently in tamarins (Saguinus spp., Leontopithecus spp.) than in marmosets (Cebuella pygmaea, Callithrix spp., Mico spp.), and callimicos (Callimico goeldii). The positional behavior of tamarins is mainly characterized by the quadrupedal walk, run and bound, and the leap between terminal branches. Vertical claw climbing and clinging activities on large supports are usually less common in tamarins than in marmosets, and are frequently associated with opportunistic and occasional exudate feeding and insect capturing, especially in the smaller species (Fleagle and Mittermeier 1980; Garber 1980, 1991; Garber and Sussman 1984; Yoneda 1984; Rosenberger and Stafford 1994; Garber and Pruetz 1995; Youlatos 1999a; Garber and Leigh 2001; Youlatos and Gasc 2001; Arms et al. 2002; Porter 2004; Cunha et al. 2006; Jackson and Ford 2006). The positional behavior of marmosets is still poorly described quantitatively, but given their more specialized plant exudate feeding behavior, it has been assumed that they incorporate higher proportions of vertical clawed locomotor and postural activities and, possibly, vertical leaping than the tamarins (Sussman and Kinzey 1984; Garber 1992; but see Garber et al. Chap. 14 this volume). The only quantitative positional data for marmosets are of the smallest representative of the family, the pygmy marmoset (Cebuella pygmaea), which exhibits frequent vertical claw climbing and claw clinging on large supports during feeding, as well as terminal and vertical leaping (Kinzey et al. 1975; Soini 1988; Youlatos 1999b; Jackson and Ford 2006). Similarly, callimicos also appear to exhibit high frequencies of vertical activities, especially vertical leaping and claw climbing (Garber and Leigh 2001; Porter 2004), locomotor styles that are functionally associated with specific postcranial traits (Davis 2002).
Despite the tendencies of both pygmy marmosets and callimicos to engage in vertical activities, they share few postcranial traits (Davis 2002, Ford and Davis Chap. 21 this volume). Pygmy marmosets appear to be unique among callitrichids, mainly due to their very small size, high rates of gummivory, liana forest and lower forest strata utilization, and occupation of their own eco-morphological space (Rosenberger 1992; Davis 2002; Youlatos 2004). This may be related to the extreme evolutionary size reduction of pygmy marmosets (Ford and Davis 1992) and the fact that in some callitrichid lineages behavioral and morphological adaptations associated with the use of large vertical supports may have evolved independently (Kinzey et al. 1975; Youlatos 1999b; Garber et al. Chap. 14 this volume). In this context, it is necessary to consider the relationship among morphological traits, postural and locomotor behavior, and habitat utilization, in order to understand the evolution of the callitrichids. Quantitative data on the positional behavior of pygmy marmosets have been previously reported (Youlatos 1999b). This chapter provides a more detailed analysis of the locomotor and postural behavior of a group of pygmy marmosets in southeastern Ecuador, along with additional, previously unpublished, information on habitat use and preference.
2 Study Site, Subjects, and Methods
The study was conducted in a 350 ha site of undisturbed terra firme hilly forest in the Yasuni National Park in southeastern Ecuador. The site (00°42′01″ S, 76°28′05″ W) is located at kilometer marker 47 on the Pompeya Sur-Iro road of Maxus Ecuador Inc. The data presented here were collected between August and October 1995. Data were collected on one group of pygmy marmosets (one adult male, one adult female, one juvenile male, one infant female). The animals were habituated 3–4 days prior to data collection, and remained in a patch of liana forest of 1 ha for the entire period of the study.
Data were collected using focal animal methods wherein an adult individual was followed for 15 min, shifting afterwards to the next available subject. If the focal animal was lost from sight for 5 min, the next available adult was followed. Three sets of data were collected: (a) 5-min general behavior and habitat use data, (b) 20-s locomotor and postural behavior data, and (c) ad libitum data on feeding and foraging The data collected using the 5-min instantaneous sampling method concerned (i) general behavior, (ii) height of the animal, (iii) support type, (iv) support size, and (v) support inclination. The twenty-second instantaneous sampling concerned data on (i) general behavior, (ii) locomotor or postural mode, (iii) associated context, (iv) support type, (v) support size and (vi) support inclination. Lastly, the ad libitum feeding and foraging parameters included (i) food type, (ii) plant food source type, (iii) height of the animal (in m), (iv) DBH of food source (in cm), and (v) bout duration (in sec). Sampled categories of behavior, positional modes, associated context, support type, size, and inclination, food type, and plant food source type are presented in Table 15.1.
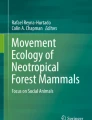
In order to assess support preference by pygmy marmosets, I estimated support availability in the study patch. Dense liana forests are characterized by a closely packed network of randomly arranged supports with a relatively regular density at lower heights (Fig. 15.1). For these reasons, I used five cuboid sampling volumes, 20 m long, 1 m wide, and 2 m high (space equivalents of sampling quadrats), within the liana forest patch exploited by the animals during the study period (Warren 1997). The area of the sampling cuboids was delimited by flagging tape on the ground, and the height was also marked by flagging tape around the major lianas and tree trunks included in the area. The sampled area represented almost 10% of the home range of the studied group. Along transects, I measured the number of available supports considering a single measured unit of support, every time one of the three concerned parameters (type, size, inclination) changed. At the end, a total of 1377 supports were measured, and availability was expressed as percents of total supports calculated for each parameter. Jacobs’ D index was used to estimate preference for different support categories (Jacobs 1974):

Liana forest in Yasuni National Park; a typical terra firme habitat of pygmy marmosets in Amazonian Ecuador
where u is the proportion of use of support, and a is the proportion of availability of support. The value of D ranges from –1 for avoidance to +1 for preference, whereas values close to 0 indicate neutrality of choice.
In total, I collected 181 records of general behavior, 418 records of travel locomotion, 202 records of feeding locomotion, 224 records of feeding postures, 89 records of foraging locomotion, and 61 records of foraging postures. In addition, I collected a total of 73 records of feeding/foraging bouts on 10 different trees and lianas. I used ANOVA with Tukey HSD post-hoc test to estimate the significance of the difference of mean heights between different behavioral contexts and between different food types, as well as the bout duration between different food types (Zar 1996). Differences between the frequencies of behaviors were calculated using log-likelihood ratio G-tests enhanced through Monte Carlo procedures (Zar 1996). In all cases, p values of 0.05 and less were considered significant.
3 Results
3.1 Habitat Utilization
During the study period, the pygmy marmosets confined their activities to a small area within a dense liana forest (see Fig. 15.1). Table 15.2 provides the percentages of availability of different support characteristics. In the area exploited by the pygmy marmosets, lianas were the dominant supports (see Table 15.2). In terms of support size, supports < 2 cm and 2–5 cm composed more than two thirds of the estimated available supports (Table 15.2). Lastly, oblique supports represented almost half of all the inclination categories, with vertical supports corresponding to 37.4% of the available supports. (Table 15.2).
Considering all the active behaviors, the pygmy marmosets mainly used lianas (54.9%) and vertical trunks (43.6%), and appeared to strongly prefer the latter (D = 0.9; see Fig. 15.2). As far as support size is concerned, the pygmy marmosets extensively used and showed a net preference for supports > 10 cm (36.8% of the supports) (see Fig. 15.2). In contrast, supports < 2 cm were used relatively infrequently (12.3%) and appeared to be avoided by the study animals (see Fig. 15.2). Vertical supports were used frequently (62.0%), but the animals showed only a slight preference for them (D = 0.46). In contrast, horizontal supports were only moderately used (24.3%) according to availability (D = 0.37).

Jacobs’s D values of preference for selected categories of support type (trunk), support size (<2 cm, > 10 cm), and support inclination (vertical, horizontal) during all behaviors, travel, feed, and forage (>0 preference, < 0 avoidance, 0 = neutral)
Feeding was the main activity of pygmy marmosets (26.5%) during the study period. Traveling and foraging accounted for 10.5% and 6.6% of the activity budget, respectively. The rest of the active period was devoted to resting (including play and grooming). When all the behavioral activities are grouped together it is clear that animals spend the majority of their time in the lower strata of the forest with an overall mean height of 6.2 ± 2.5 m above ground. Strata use varied across behaviors; however, the mean feeding height was 5.25 ± 2.28 m, and was significantly higher than the mean traveling height (3.26 ± 1.33 m; Tukey HSD: p = 0.009). In contrast, foraging occurred at a mean height of 4.7 ± 1.6 m above the ground and was not significantly different from either traveling or feeding. Only resting appeared to occur significantly higher than all the other behaviors (7.3 ± 2.1 m; Tukey HSD: rest vs. feed p < 0.001; rest vs. forage p < 0.001; rest vs. travel p < 0.001).
3.2 Feeding and Foraging
During the period of data collection, observations of feeding were exclusively on exudates. Exudate feeding bouts (n = 61) lasted 112.2 ± 106.8 s, and were significantly shorter than insect foraging bouts (n = 12, mean = 173.6 ± 88.6 s; F = 1.75 p = 0.049). During exudate feeding, the study animals exploited seven different lianas with a mean DBH of 8.7 ± 8.9 cm, which was significantly smaller than that of the tree trunks exploited for exudates (n = 3, mean DBH = 30.05 ± 15.5; F = 2.12, p = 0.023).
Both feeding locomotion and postures occurred principally on trunks (see Table 15.3), and the pygmy marmosets showed a very strong preference for this type of support (D = 0.99, see Fig. 15.2). Supports > 10 cm were very frequently used (see Table 15.3) and were clearly preferred (see Fig. 15.2). In contrast, the pygmy marmosets infrequently used supports < 2 cm (see Table 15.3) and appeared to avoid them (see Fig. 15.2). In terms of support inclination, vertical supports almost monopolized both feeding locomotion and postures (see Table 15.3), and were strongly preferred (D = 0.97, see Fig. 15.2). In contrast, horizontal supports were seldom used (Table 15.3) and were avoided (see Fig. 15.2).
During feeding, claw climb was by far the dominant locomotor mode (93.6%) with vertical leaping ranking second (see Table 15.4). In a similar manner, feeding postures were largely dominated by vertical claw clinging (Table 15.5), that occurred primarily on supports > 10 cm (see Fig. 15.3).

Percents of use of different support size categories during selected locomotor and postural modes (T-QW: quadrupedal walk in travel; T-QB: quadrupedal bound in travel; T-CLAW: claw climb in travel; FD-CLING: claw cling in feed; FR-STAND: quadru/tripedal stand in forage; FR-CANT: cantilever in forage)
Foraging bouts concerned active search and capturing of arthropods on dense liana entanglements. Lianas were preferred for all locomotion and postures during foraging (Table 15.3; D = 0.55). During foraging activities, the pygmy marmosets extensively used supports under 5 cm in diameter. These accounted for almost two thirds of support use (see Table 15.3). Horizontal supports represented half of the utilized supports (Table 15.3) and were preferred by the study animals (see Fig. 15.2).
During foraging, the quadrupedal walk was the dominant locomotor mode, with claw climbing ranking next (see Table 15.4). In addition, the quadrupedal bound, vertical leaping and clamber also were used frequently during foraging (see Table 15.4). The quadrupedal stand and cantilever were the dominant foraging postures (see Table 15.5). Quadrupedal postures occurred primarily on supports of 2–5 cm, whereas almost two thirds of the supports used in cantilever were < 2 cm (see Fig. 15.3).
3.3 Travel Locomotion
During travel locomotion, lianas were the dominant supports (77.8%). However, vertical trunks, which ranked second (see Table 15.3), appeared to be particularly preferred (see Fig. 15.2). Supports with diameters of between 2–5 cm and 5–10 cm were also frequently used (Table 15.3). In contrast, small (<2 cm) and very large (>10 cm) supports were used infrequently (see Table 15.3), and the former appeared to be avoided by pygmy marmosets (D = −0.67, see Fig. 15.2). Vertical and horizontal supports were commonly used (Table 15.3), but the latter appeared to be slightly preferred (see Fig. 15.2).
Claw climbing and terminal leaping were the dominant traveling modes (see Table 15.4). The quadrupedal walk, quadrupedal bound and vertical leaping were also relatively common (see Table 15.4). When the pygmy marmosets traveled within a single tree, they mainly employed clawed locomotion (see Fig. 15.4), whereas the other modes were used frequently for crossing between trees (see Fig. 15.4). The claw climb principally occurred on relatively large supports, of which more than half were > 10 cm (see Fig. 15.3). On the other hand, the quadrupedal walk occurred primarily on supports less than 5 cm (see Fig. 15.3). In contrast, support use during the quadrupedal bound differed significantly from the quadrupedal walk (walk vs. bound: G = 17.2, p = 0.001), as the supports during bounding were commonly of a diameter between 2 and 10 cm (see Fig. 15.3).

Percents of major locomotor modes used within and between trees
In terms of terminal leaps, 54.1% of recorded leaps covered distances < 0.5 m. When all terminal leaps were compared, the size of both initial and landing supports were statistically similar, and all occurred on supports of < 5 cm. A similar profile in initial and terminal support size use was derived, when short (horizontal distance < 0.5 m) and long (horizontal distance > 0.5 m) leaps were compared (Table 15.6). In terms of support inclination, short leaps were initiated more from oblique supports than horizontal supports, whereas longer leaps were initiated more from horizontal supports than oblique supports (see Fig. 15.5). These differences were statistically significant (G = 8.61, p = 0.014). Landing frequently occurred on horizontal and oblique supports for both distance categories, showing a significantly lower use of oblique supports in short leaps (G = 6.1, p = 0.046; see Fig. 15.5).

Percents of use of initial and landing support inclination categories in short terminal leaps (<0.5 m) and long terminal leaps (>0.5 m)
In terms of vertical leaps, 51.6% of the recorded leaps were < 0.5 m in distance, and initial and landing supports were between 2 and 10 cm. As indicated above, terminal leaps occurred significantly more frequently on smaller supports than during vertical leaps (vertical leaps vs. terminal leaps: initial supports: G = 33.1, p < 0.001; landing supports: G = 48.04, p < 0.001). When horizontal leaps of different distances were compared (see Table 15.7), it is clear that short vertical leaps are initiated from smaller supports (5–10 cm) than longer vertical leaps (initial supports: short vertical vs. long vertical: G = 16.2, p = 0.013). However, both short and long vertical leaps frequently terminated on supports 2–10 cm, with no significant differences between the two (see Table 15.7).
4 Discussion
This study on habitat utilization and positional behavior of pygmy marmosets has revealed important insights into how these small callitrichids exploit their environment. In the terra firme liana forest of Yasuni National Park in Ecuadorian Amazonia, pygmy marmosets confined their activities to the lower strata of the understory. Traveling occurred very close to the ground, while feeding and foraging took place only slightly higher. These results are in accordance with previous observations on the activity patterns of pygmy marmosets in flooded forests (Soini 1988; Townsend 2001). Overall, pygmy marmosets showed consistent use and strong preference for vertical supports of mainly large size while both traveling and feeding. This is also the case for groups of pygmy marmosets in other forests (Kinzey et al. 1975; Soini 1988; Townsend 2001). Significant use of large vertical supports has also been reported for other callitrichids, but the pygmy marmosets in this study showed more frequent use of vertical supports than all other species, including callimico (Garber 1980; Garber and Pruetz 1995; Youlatos 1999a; Youlatos and Gasc 2001; Porter 2004; Cunha et al. 2006; Garber et al. Chap. 14 this volume). In terms of support size use, pygmy marmosets mainly used supports 2–10 cm in diameter. Direct comparisons of support use with other studies are not feasible given the differences in the definition of size categories. Large callitrichids such as callimicos and red-handed tamarins (Saguinus midas) do not appear to exhibit a preference for such large diameter supports (Youlatos and Gasc 2001; Porter 2004). On the other hand, the large moustached tamarins (Saguinus mystax), which engage in high frequencies of quadrupedal activities, as well as the common marmoset (Callithrix jacchus), which engage in both quadrupedal and leaping activities, appear to show a comparable profile of large-sized support use (Garber and Pruetz 1995; Cunha et al. 2006).
During the study period, pygmy marmosets fed mainly on exudates while positioned on vines and trees of large diameter. This was also the case for other groups of pygmy marmosets in flooded forests (Kinzey et al. 1975; Soini 1988; Townsend 2001). In contrast, foraging involved longer bouts for the active search of arthropods within dense liana entanglements, a pattern also observed in other studies (Kinzey et al. 1975; Soini 1988). These striking differences in microhabitat use during different behavioral contexts resulted in significant differences in the respective postural and locomotor behavior.
During exudate feeding, locomotion was primarily performed by claw climbing upon vertical trunks. Vertical leaping was rather uncommon. Consumption of exudates was executed through claw clinging on the vertical trunks of the feeding sources. Frequent claw climbing and claw clinging is also encountered in other small bodied exudate feeding primates (Charles-Dominique 1977; Crompton 1984; Garber, 1992; Off and Gebo 2005) and is usually associated with specific postcranial morphofunctional adaptations. Claw clinging postures on large vertical supports allow the establishment of a relatively firm lever system that is required for gouging activities (Cartmill 1974, 1985; Kinzey et al. 1975; Garber 1992; Hamrick 1998). Additionally, vertical claw clinging allows small primates to scan for arthropods that either dwell upon the bark of trees and vines or on the ground litter (Charles-Dominique 1977; Crompton 1984; Garber 1992). Finally, they may also serve as launching or landing platforms for traveling, especially for those animals that may infrequently forage on vertical trunks for either arthropods or exudates such as callimicos (Porter 2004) or squirrels (Youlatos 1999c).
In pygmy marmosets, arthropod foraging on small-sized liana entanglements apparently requires slow and fast quadrupedal activities. The walk, bound, and clamber appear to enable pygmy marmosets to engage in cautious and rapid movements within this dense and unstable microhabitat. Subsequently, mobile prey was accessed and ultimately captured by active cantilever. The same active postural mode is also used in high frequencies by many other small-bodied primates that habitually forage on small gregarious prey (Charles-Dominique 1977; Crompton 1984). On the other hand, prey manipulation and ingestion is accomplished by adopting quadrupedal and/or tripedal standing, a foraging posture that provides relative stability while handling prey, especially when occurring on relatively larger supports as is the case for pygmy marmosets.
Traveling between feeding and foraging sites was performed by the use of relatively shared proportions of claw climbing, leaping, and quadrupedal fast and slow progression, whereas vertical leaping was less common. Similar profiles have been previously reported for pygmy marmosets in flooded forests (Kinzey et al. 1975; Soini 1988). These modes compose the principal positional profiles for almost all callitrichids that have been studied so far (Fleagle and Mittermeier 1980; Garber 1980, 1991; Garber and Sussman 1984; Garber and Pruetz 1995; Youlatos 1999a; Garber and Leigh 2001; Youlatos and G; asc 2001; Arms et al. 2002; Porter 2004; Cunha et al. 2006), but pygmy marmosets appear to claw climb and claw cling more than tamarins and callimicos. However, the lack of detailed quantitative data on the positional behavior of other marmosets (Callithrix, Mico, Callibella) renders comparisons across callitrichids impossible. The very specialized exudativory of other marmosets implies that frequent vertical clawed postural and locomotor activities must be quite common (Garber 1992), although this remains to be tested in the field.
The presence of claws is advantageous for all arboreal mammals that need to exploit large vertical supports for traveling and feeding (Cartmill 1974; Hamrick 1998). Nevertheless, the vertical support niche that pygmy marmosets appear to prefer imposes mechanical constraints that are relative to body size: smaller mammals would face greater problems than larger ones in grasping vertical supports regularly encountered in the forest understory (Cartmill 1974, 1985). Thus, although claws enable arboreal mammals of all sizes to negotiate large vertical supports, smaller ones tend to engage in higher frequencies of positional activities that involve claws, such as the claw climb and claw cling in all directions (see Youlatos 1999c).
In pygmy marmosets, the relatively long forelimbs, the short radii, and the specialized shoulder joint anatomy, reflect their tendency to move frequently through vertical claw climbing and clinging (Davis 2002; Ford and Davis Chap. 21 this volume). The lateral placement of the forelimbs should facilitate both firm immobility and powerful movements upon large vertical supports (Cartmill 1985; Thorington and Thorington 1989). However, no similar trend has been observed among tamarins which frequently claw climb and cling vertically (Garber 1991; Garber and Leigh 2001). On the other hand, pygmy marmosets appear to lack certain functional specializations of the scapula that characterize other vertically clinging callitrichids (Davis 2002; Ford and Davis Chap. 21 this volume). It is very likely that the particularly reduced size of pygmy marmosets has imposed different mechanical constraints on the postcranium. In addition, the fact that pygmy marmosets also move frequently using the quadrupedal walk, bound, and clamber in both travel and foraging may account for the differences between pygmy marmoset morphology and that of the other callitrichids.
Contrary to previous assumptions (Kinzey et al. 1975), pygmy marmosets are not particularly frequent leapers compared to the other callitrichids. Leaping between terminal supports was the main gap crossing traveling mode for pygmy marmosets, and all terminal leaps (both short and long) appeared to be both initiated and terminated on supports < 5 cm. This pattern of initial and landing support use, in what is usually termed as acrobatic leaps, is also encountered in the other callitrichids that use high proportions of leaping behavior (Garber 1992; Garber and Pruetz 1995; Garber and Leigh 2001; Cunha et al. 2006; Garber et al. Chap. 14 this volume). In effect, most tamarins employ similar (or greater) frequencies of terminal leaping as the pygmy marmosets do, but only a few species engage in similar frequencies of vertical leaping (Garber 1991; Youlatos 1999a; Garber and Leigh 2001; Youlatos and Gasc 2001; Porter 2004). In contrast, callimicos are unique among all the callitrichids, in their common use of a very specialized bounding hop, as well as the terminal and vertical leaps (Rosenberger and Stafford 1994; Garber and Leigh 2001). In the latter, they appear to be particularly proficient (see Garber et al. 2005). These differences in leaping behavior may explain the particular postcranial morphology of pygmy marmosets which lacks considerable adaptations related to vertical leaping compared to the highly specialized hind limb morphology of callimico (Davis 2002).
In contrast to terminal branch leaping, vertical leaps were initiated from larger supports. In addition, longer vertical leaps initiated on larger supports than shorter vertical leaps, and all primarily terminated on supports of a diameter under 10 cm. Vertical leap initiation from large diameter supports appears to be a means to reduce energy loss since support compliance decreases as support diameter increases (Crompton et al. 1993). Leapers tend to prefer large initial supports, particularly small mammals whose take-off forces are higher than those of larger mammals (Demes et al. 1995). This energy avoidance strategy may also explain why pygmy marmosets initiate longer vertical leaps from significantly larger supports than shorter vertical leaps. Overall, it can be hypothesized that smaller leaping callitrichids would tend to prefer larger initial supports (at least relative to their body sizes) in higher frequencies than larger leaping primates. Unfortunately, detailed data for similar comparisons are unavailable, but this pattern was not supported by observations in sympatric tamarins and callimicos (Garber and Leigh 2001).
Demes et al. (1995) also suggest that, as landing forces are reduced by support compliance, arboreal leapers tend to select landing supports that are usually smaller in diameter. This pattern was partly observed in the vertical leaps of pygmy marmosets. That would imply that pygmy marmosets most likely try to reduce these forces by opting for the more suitable supports in the understory, trying to reduce physical exertion as an energy saving strategy.
The analysis of the positional behavior of pygmy marmosets has shown that claw climbing, claw clinging, and vertical leaping may not be specifically related to each other and may be adaptations for different behavioral contexts. In callitrichids, extensive use of claw climbing and clinging on large vertical supports appears to be related to a specific foraging strategy of exploiting vertical resources, such as bark dwelling insects and exudates (Garber 1992). This is further supported by the relatively low percents of clawed activities in callimicos that engage infrequently in exudate feeding (but see Porter et al., submitted) or foraging on bark-dwelling arthropods (Garber and Leigh 2001; Porter and Garber 2004). In the case of pygmy marmosets, the extreme evolutionary reduction of body size is very likely to be associated with the remarkably high frequency of these vertical clawed activities (see also Ford 1986). On the other hand, in other species, claws may be used primarily for traveling within the understory where vertical supports are abundant and travel is facilitated by vertical clawed activities. For example, squirrels that use the lowest forest layers frequently engage in vertical leaping (Youlatos 1999c), and callimicos which exploit certain food resources found on tree trunks, such as bamboo fungus, and use vertical supports to locate insects, small vertebrates, and fungi on or near the ground, often engage in vertical travel in the understory (Porter and Garber 2004).
The results of the present report do not lend support to clear relationships between morphology and positional behavior among callitrichids. Further and more detailed analyses of postcranial morphology, coupled with experimental approaches of vertical leaping kinematics and biomechanics (see Garber et al. Chap. 14 this volume) and detailed analyses of the positional behavior of marmosets will establish more robust, morpho-functional associations. In addition, more detailed data on the manipulative behavior of these primates during foraging will also help clarify the relationship between morphology and behavior (see Bicca-Marques 1999). Moreover, the newly discovered dwarf marmoset (Callibella humilis), which seems to be closely related to both the Amazonian marmosets (Mico) and pygmy marmosets, appears to be of intermediate morphology between the two genera (Van Roosmalen and van Roosmalen 2003, Ford and Davis Chap. 21 this volume) and should help clarify how adaptations in morphology and behavior have evolved among the callitrichids.
References
Arms A, Voges D, Fischer M, Preuschoft H (2002) Arboreal locomotion in small New World monkeys. Z Morphol Anthropol 83:243–263
Bicca-Marques JC (1999) Hand specialization, sympatry, and mixed-species associations in callitrichines. J Hum Evol 36:349–378
Cartmill M (1974) Pads and claws in arboreal locomotion. In: Jenkins FA Jr (ed) Primate locomotion. Academic Press, New York, pp 45–83
Cartmill M (1985) Climbing. In: Hildebrand M, Bramble DM, Liem KF, Wake KD (eds) Functional vertebrate morphology. Belknap Press, Cambridge, pp 73–88
Charles-Dominique P (1977) Ecology and behaviour of nocturnal primates. Columbia University Press, New York
Cortés-Ortiz L (this volume) Molecular phylogenetics of the Callitrichidae with an emphasis on the marmosets and Callimico. In: Ford SM, Porter LM, Davis LC (eds) The smallest anthropoids: The marmoset/callimico radiation. Springer Press, New York, pp 3–24
Crompton RH (1984) Habitat structure, foraging, and locomotion in two species of Galago. In: Rodman PS, Cant JGH (eds) Adaptations for foraging in non-human primates. Columbia University Press, New York, pp 73–111
Crompton RH, Sellers WI, Gunther MM (1993) Energetic efficiency and ecology as selective factors in the saltatory adaptation of prosimian primates. Proc R Soc Lond B 254:41–45
Cunha AA, Vieira MV, Grelle CEV (2006) Preliminary observation on habitat, support use and diet in two non native primates in an urban Atlantic forest fragment: the capuchin monkey (Cebus sp.) and the common marmoset (Callithrix jacchus) in the tijuca forest, Rio de Janeiro. Urban Ecosyst 9:351–359
Davis LC (2002) Functiona morphology of the forelimb and long bones in the Callitrichidae (Platyrrhini, Primates). PhD Dissertation, Southern Illinois University, Carbondale
Demes B, Jungers WL, Gross TS, Fleagle JG (1995) Kinetics of leaping primates: Influence of substrate orientation and compliance. Am J Phys Anthrop 96:416–429
Fleagle JG, Mittermeier RA (1980) Locomotor behavior, body size, and comparative ecology of seven Surinam monkeys. Am J Phys Anthrop 52:301–314
Ford SM (1980) Callithricids as phyletic dwarfs, and the place of the Callithricidae in the Platyrrhini. Primates 21:31–43
Ford SM (1986) Comments on the evolution of claw-like nails in Callithricids (marmosets/tamarins). Am J Phys Anthrop 70:25–26
Ford SM, Davis LC (1992) Systematics and body size: implications for feeding adaptations in New World monkeys. Am J Phys Anthropol 88:415–468
Ford SM, Davis LC (this volume) Marmoset postcrania and the skeleton of the dwarf marmoset, Callibella humilis. In: Ford SM, Porter LM, Davis LC (eds) The smallest anthropoids: The marmoset/callimico radiation. Springer Press, New York, pp 411–448
Garber PA (1980) Locomotor behavior and feeding ecology of the Panamanian tamarin (Saguinus oedipus geoffroyi, Callithricidae, Primates). Int J Primatol 1:185–201
Garber PA (1991) A comparative study of positional behavior in three species of tamarin monkeys. Primates 32:219–230
Garber PA (1992) Vertical clinging, small body size, and the evolution of feeding adaptations in the Callitrichinae. Am J Phys Anthrop 88:469–482
Garber PA, Leigh SR (2001) Patterns of positional behavior in mixed-species troops of Callimico goeldi, Saguinus labiatus, and Saguinus fuscicollis in northwestern Brazil. Am J Primatol 54:17–31
Garber PA, Pruetz JD (1995) Positional behavior in moustached tamarin monkeys: Effects of habitat on locomotor variability and locomotor stability. J Hum Evol 28:411–426
Garber PA, Sussman RW (1984) Ecological distinctions in sympatric species of Saguinus and Sciurus. Am J Phys Anthrop 65:135–146
Garber PA, Blomquist G, Anzenberger G (2005) Kinematic analysis of trunk-to-trunk leaping in Callimico goeldii. Int J Primatol 26:223–240
Garber PA, Sallanave A, Blomquist G, Anzenberger G (this volume) A comparative study of the kinematics of trunk-to-trunk leaping in Callimico goeldii, Callithrix jacchus, and Cebuella pygmaea. In: Ford SM, Porter LM, Davis LC (eds) The smallest anthropoids: The marmoset/callimico radiation. Springer Press, New York, pp 259–277
Hamrick MW (1998) Functional and adaptive significance of primate pads and claws: Evidence from New World anthropoids. Am J Phys Anthrop 106:113–127
Hershkovitz P (1977) Living New World monkeys (Platyrrhini), vol 1. University of Chicago Press, Chicago
Jackson CP, Ford SM (2006) Contexts of positional behavior in captive pygmy marmosets (Cebuella pygmaea). Am J Phys Anthrop S42:109
Jacobs J (1974) Quantitative measurement of food selection. Oecologia 14:413–417
Kinzey WG, Rosenberger AL, Ramirez M (1975) Vertical clinging and leaping in a neotropical anthropoid. Nature 255:327–328
Neusser M, Stanyon R, Bigoni F, Wienberg J, Muller S (2001) Molecular cytotaxonomy of New World monkeys (Platyrrhini): comparative analysis of five species by multi-color chromosome painting gives evidence for a classification of Callimico goeldii within the family Callitrichidae. Cytogenet Cell Genet 94:206–215
Off EC, Gebo DL (2005) Galago locomotion in Kibale National Park, Uganda. Am J Primatol 66:189–195
Porter L (2004) Forest use and activity patterns of Callimico goeldi in comparison to two sympatric tamarins, Saguinus fuscicollis and Saguinus labiatus. Am J Phys Anthrop 124:139–153
Porter LM, Garber PA (2004) Goeldi’s monkeys: A primate paradox? Evol Anthropol 13:104–115
Rosenberger AL (1977) Xenothrix and ceboid phylogeny. J Hum Evol 6:461–481
Rosenberger AL (1992) Evolution of feeding niches in New World monkeys. Am J Phys Anthropol 88:525–562
Rosenberger AL, Stafford BJ (1994) Locomotion in captive Leontopithecus and Callimico: a multimedia study. Am J Phys Anthrop 94:379–394
Soini P (1988) The pygmy marmoset, genus Cebuella. In: Mittermeier RA, Rylands AB, Coimbra-Filho A, Fonseca GAB (eds) Ecology and behavior of neotropical primates. WWF, Washington, DC, pp 79–130
Sussman RW, Kinzey WG (1984) The ecological role of the Callithricidae: A review. Am J Phys Anthrop 64:419–449
Thorington RW Jr, Thorington EM (1989) Postcranial proportions of Microsciurus and Sciurillus, the American pygmy tree squirrels. Adv Neotrop Mammal 1989:125–136
Townsend WR (2001) Callithrix pygmaea. Mammal Spec 665:1–6
Van Roosmalen MGM, van Roosmalen T (2003) The description of a new marmoset genus, Callibella (Callitrichinae, Primates), including its molecular phylogenetic status. Neotrop Prim 11:1–10
Warren RD (1997) Habitat use and support preference of two free-ranging saltatory lemurs (Lepilemur edwardsi and Avahi occidentalis). J Zool Lond 241:325–341
Yoneda M (1984) Comparative studies on vertical separation, foraging behavior and traveling mode of saddle-backed tamarins (Saguinus fuscicollis) and red-chested moustached tamarins (Saguinus labiatus) in northern Bolivia. Primates 25:414–422
Youlatos D (1999a) Comparative locomotion of six sympatric primates in Ecuador. Ann Sci Nat Zool Biol Anim 20:161–168
Youlatos D (1999b) Positional behavior of Cebuella pygmaea in Yasuni National Park, Ecuador. Primates 40:543–550
Youlatos D (1999c) Locomotor and postural behavior of Sciurus igniventris and Microsciurus flaviventer (Rodentia, Sciuridae) in eastern Ecuador. Mammalia 63:405–416
Youlatos D (2004) A multivariate analysis of organismal and habitat parameters in two neotropical primate communities. Am J Phys Anthrop 123:181–194
Youlatos D, Gasc J-P (2001) Comparative positional behaviour of five primates. In: Bongers F, Charles-Dominique P, Forget M, Théry M (eds) Nouragues: Dynamics and plant-animal interactions in a neotropical rain forest. Kluwer Academic Publishers, Dordrecht, pp 103–114
Zar JH (1996) Biostatistical analysis. Prentice-Hall, London
Acknowledgments
I am particularly indebted to Drs. SM Ford, LC Davis, and LM Porter who invited me to contribute to this volume. Field research was made feasible by the financial support of NSF (SBR 9222526), attributed to Dr. JGH Cant, University of Puerto Rico, to whom my warm thanks are addressed. In addition, I am indebted to Dr. PS Rodman, University of California at Davis, for his assistance in locating the study site and logistics, Dr. L Albuja V, Escuela Politécnica Nacional in Quito, for a wide variety of essential assistance, Mr. I Cornejo P, for his help in transportation, Dr. L Arcos Teren, Pontificia Universidad Católica del Ecuador, for arranging lodging at the research station, and the Ecuadorian Institute of Forestry and Natural Areas (INEFAN) for permission to conduct study in the Yasuni National Park. Many thanks are due to Dr. WE Pozo for his help during data collection, and to Drs. A DiFiore and L Dew for their assistance in the field.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2009 Springer Science+Business Media, LLC
About this chapter
Cite this chapter
Youlatos, D. (2009). Locomotion, Postures, and Habitat Use by Pygmy Marmosets (Cebuella pygmaea). In: Ford, S., Porter, L., Davis, L. (eds) The Smallest Anthropoids. Developments in Primatology: Progress and Prospects. Springer, Boston, MA. https://doi.org/10.1007/978-1-4419-0293-1_15
Download citation
DOI: https://doi.org/10.1007/978-1-4419-0293-1_15
Published:
Publisher Name: Springer, Boston, MA
Print ISBN: 978-1-4419-0292-4
Online ISBN: 978-1-4419-0293-1
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)