
Abstract
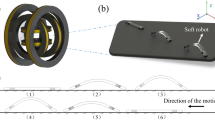
This paper describes the earthworm robot composed of commercial shape memory alloy, called BioMetal. Our mechanism has the unique stracture with SF tubing for extention force. This robot aims at not only moving by changing length, but also changing thickness like real earthworm. The mechanism makes difference of a friction coefficient to the ground is produced, and the robot can move more smoothly. Finally, our robot realized a motion like earthworm by connecting units and controlling timing by the microcomputer. The robot has four units. The total length is 475[mm], and promosion speed is 3.4[mm/s].
Access provided by Autonomous University of Puebla. Download to read the full chapter text
Chapter PDF
Similar content being viewed by others


Keywords
7 Referrences
http://www.toki.co.jp/BioMetal/
S, Ueda, N, Saga, & T, Nakamura, (2003.7) Study on Peristaltic Crawling Robot Using Artificial Muscle Actuator. SICE Tohoku Chapter the 210th research meeting data pp.1–7.
Author information
Authors and Affiliations
Rights and permissions
Copyright information
© 2007 Springer-Verlag London Limited
About this paper
Cite this paper
Saito, T., Kagiwada, T., Harada, H., Kawamura, Y. (2007). Development of the Earthworm Robot using a Shape Memory Alloy. In: Towards Synthesis of Micro-/Nano-systems. Springer, London. https://doi.org/10.1007/1-84628-559-3_62
Download citation
DOI: https://doi.org/10.1007/1-84628-559-3_62
Publisher Name: Springer, London
Print ISBN: 978-1-84628-558-5
Online ISBN: 978-1-84628-559-2
eBook Packages: EngineeringEngineering (R0)