
Abstract
Single-receiver ambiguity fixing can enhance the observation geometric constraint, and improve the orbit accuracy of low Earth Orbit (LEO) satellites. We propose a single-receiver ambiguity fixing method by taking the carrier phase residual as the index to choose reference in the single-difference ambiguities. The ambiguity fixing performance and Precise Orbit Determination (POD) is verified by using the spaceborne BDS3 observation from Tianhui 02-02 satellites. The ambiguity fixing success rates for BDS3 wide- and narrow-lanes are 98% and 89%. Taking the GPS-based orbit with single-receiver ambiguity fixing as a reference, the orbit comparison shows that the accuracy of radial, tangential and normal directions of BDS3-based POD are improved by 26%, 42% and 52% with the single-receiver ambiguity fixing, and the three-dimensional RMS of orbit difference is improved from 2.5 cm to 1.4 cm. The baseline from the orbit difference is evaluate by comparing to the baseline derived from the double-difference GPS-based precise relative orbit determination. The radial, tangential and normal accuracy of baseline solution are improved by 27%, 45% and 46% when fixing ambiguity. The 3D RMS of baseline difference is reduced from 7.6 mm to 4.3 mm. The single-receiver ambiguity fixing can be performed by using our ambiguity fixing method, and the accuracy of BDS3-based POD and baseline can be improved.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
Low earth orbit satellites (LEOs) have been widely used in mapping, ocean altimetry, gravity field measurement and other tasks. The prerequisite to achieve the above tasks is the precise orbit determination (POD) of LEOs. At present, spaceborne GPS is the main method to perform the POD of LEOs, such as GRACE, Swarm, Sentinel satellite missions, and the orbit accuracy has reached the centimeter level [1]. As an independent satellite navigation system developed by China, BDS provides a new data source for POD of LEOs. The research on POD of Fengyun-3C, Zhangheng-1 and Tianhui 02-01 satellites shows that the orbit accuracy of LEOs using BDS2 regional constellation can reach 10–15 cm [2,3,4]. Compared to BDS2 regional navigation system, BDS3 global navigation system has more navigation satellites, higher orbit and clock accuracy, and can provide better positioning services for users. Zhao et al. have realized the POD of Tianping-1B satellite based on the observation tracked from part of BDS3 constellation. The difference between the BDS3 and GPS-based orbits is within 5 cm [5]. Li et al. realized the POD of Haiyang-2D satellites based on the observations tracked from the Median Earth Orbit (MEO) and Inclined GeoSynchronous Orbit (IGSO) constellations in BDS3. The residual of satellite laser ranging (SLR) reached 2.3 cm [6]. With the increasing number of LEOs with onboard BDS3 receivers, it is necessary to further improve the precision of BDS3-based POD for the development of LEO missions.
Due to the hardware delay of navigation satellite and receiver, the undifferenced carrier phase ambiguity obtained by POD of LEOs loses its integer property. If the hardware delay can be eliminated and the integer property of ambiguity can be recovered, the orbit of LEOs could have higher accuracy. Using various ambiguity fixing methods, such as uncalibrated phase delay [7], integer recover clock [8] and decoupled satellite clock model [9], many analysis centers have been routinely generating GPS satellite bias products. These products are able to satisfied the requirement of POD for LEOs with the single-receiver GPS ambiguity fixing. Montenbruck et al. used the GPS bias product provided by Centre National d’Études Spatiales/Collecte Localisation Satellites (CNES/CLS) to determine the single-receiver ambiguity-fixed orbit of Sentinel-3A satellite. SLR residual shows that the accuracy of ambiguity-fixed orbit is 30% higher than the float ambiguity orbit [10]. Zhang et al. used the GPS ephemeris, clock and bias products provided by the Center for Orbit Determination in Europe (CODE), CNES/CLS and Wuhan University (WHU) to perform the GPS-based POD of GRACE-FollowOn and Sentinel-3 satellites. The SLR residual of orbit with ambiguity fixing decreased by 1–4 mm compared to that with float ambiguity [11]. Besides GPS, with the accuracy improvement of BDS satellite precise orbit and clock products, many analysis centers have generated BDS satellite bias products. These products provide a great opportunity for the research on BDS3-based POD with single-receiver ambiguity fixing.
This paper first introduces the method of single-receiver ambiguity fixing, then presents the reduced-dynamic orbit determination strategy for LEOs, and finally analyzes the ambiguity fixing performance, POD and inter-satellite baseline results.
2 Single-Receiver Ambiguity Fixing
The observation equation is constructed by using spaceborne dual-frequency pseudorange and carrier phase observation:
where 1 and 2 respectively correspond to BDS B1I and B3I frequency bands, r represents the receiver carried by the LEO satellite, s represents BDS3 satellite, f1 and f2 represent the carrier phase frequencies of frequency bands 1 and 2, respectively, λ1 and λ2 is the wavelength of the first and second carrier phase frequencies respectively, ρ is the geometric distance between BDS3 satellite and LEO satellite. z represents the sum of the influence of BDS3 satellite and LEO satellite antenna phase center offset (PCO) and phase center variation(PCV), dtr and dts are clock offsets of receiver and BDS3 satellites, \(I_{{\text{r}}}^{{\text{s}}}\) is the first-order ionospheric delay during signal transmission at the first frequency band, \(\gamma_{{\text{r}}}\) and \(\gamma^{{\text{s}}}\) are the pseudorange hardware delays for receiver and BDS3 satellites, \(\delta_{{\text{r}}}\) and \(\delta^{{\text{s}}}\) are the carrier phase hardware delays for receiver and BDS3 satellites, N is carrier phase ambiguity, ε is random error. Besides, the pseudorange and carrier phase measurements are also affected by the relativistic effect and antenna phase windup, which are all corrected by models. To eliminate the ionospheric delay, the ionospheric-free (IF) combination of pseudorange and carrier phase is usually used as the basic observation in data processing:
where \(A_{IF}^{{}}\) is the IF combination of \(\lambda_{1} N_{1}^{{}}\) and \(\lambda_{2} N_{2}^{{}}\): \(A_{IF}^{{}} = \frac{{f_{1}^{2} }}{{f_{1}^{2} - f_{2}^{2} }}\lambda_{1} N_{1}^{{}} - \frac{{f_{2}^{2} }}{{f_{1}^{2} - f_{2}^{2} }}\lambda_{2} N_{2}^{{}}\). Since the hardware delays are introduced into \(A_{IF}^{{}}\) which obtained by POD and the coefficients \(\frac{{f_{1}^{2} }}{{f_{1}^{2} - f_{2}^{2} }}\lambda_{1}\) and \(\frac{{f_{2}^{2} }}{{f_{1}^{2} - f_{2}^{2} }}\lambda_{2}\) are not integers, \(A_{IF}^{{}}\) is also not integer. However, it can be expressed by the combination of the wide- and narrow-lane ambiguities:
where \(\lambda_{{{\text{wl}}}} = {c \mathord{\left/ {\vphantom {c {\left( {f_{1} - f_{2} } \right)}}} \right. \kern-0pt} {\left( {f_{1} - f_{2} } \right)}}\) is wide-line wavelength. \(\lambda_{{{\text{nl}}}} = {c \mathord{\left/ {\vphantom {c {\left( {f_{1} + f_{2} } \right)}}} \right. \kern-0pt} {\left( {f_{1} + f_{2} } \right)}}\) is narrow-line wavelength. \(N_{{{\text{wl}}}} = N_{1} - N_{2}\) is wide-line ambiguity. \(N_{1}^{{}}\) is called narrow-line ambiguity. By fixing the wide- and narrow-lane ambiguity successively, the IF ambiguity can be fixed.
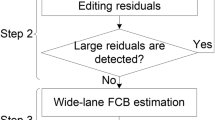
First, the wide-line ambiguity is fixed by the difference of the Melbourne-Wüebbena(MW) combinations from common-view BDS3 satellites. MW combination of pseudorange and carrier phase eliminates the geometric distance, clock offset and ionospheric delay, and only remain ambiguity, antenna phase center corrections and hardware delays:
where \(d = \frac{{\lambda_{1}^{{}} \lambda_{2}^{{}} }}{{\lambda_{2}^{2} - \lambda_{1}^{2} }}\left( {z_{{{\text{r}};1}}^{{\text{s}}} - z_{{{\text{r}};2}}^{{\text{s}}} } \right)\) is the MW combination of antenna phase center corrections. The MW combination of satellite hardware delays \({\text{MW}}\left( {\delta_{1}^{{\text{s}}} ,\delta_{2}^{{\text{s}}} ,\gamma_{1}^{{\text{s}}} ,\gamma_{2}^{{\text{s}}} } \right)\). Can be directly eliminated by correcting observation using satellite bias products provided by different analysis centers. The MW combination of observation \({\text{MW}}\left( {L_{1}^{{}} ,L_{2}^{{}} ,P_{1}^{{}} ,P_{2}^{{}} } \right)\) from common-view BDS3 satellites is differentiated to eliminate the hardware delays of the receiver \({\text{MW}}\left( {\delta_{{{\text{r}};1}}^{{}} ,\delta_{{{\text{r}};2}}^{{}} ,\gamma_{{{\text{r}};1}}^{{}} ,\gamma_{{{\text{r}};2}}^{{}} } \right)\). By rounding single-difference wide-line ambiguity \(\Delta N_{{{\text{wl}}}}^{{}}\) to its nearest integer, the wide-line ambiguity can be fixed \(\left[ {\Delta N_{{{\text{wl}}}}^{{}} } \right]\).
It is worth noting that CNES uses uncombined GNSS data to generate OSB product, which is affected by the PCO of GNSS satellites. Therefore, it is necessary to correct the BDS3 PCO in the raw data when using CNES multi-GNSS bias product to fix the single-difference wide-lane ambiguity [12].
Then, the fixed single-difference wide-lane ambiguity and single-difference IF ambiguity are used to solve the single-difference narrow-lane ambiguity. The fixed single-difference wide-lane ambiguity \(\left[ {\Delta N_{{{\text{wl}}}}^{{}} } \right]\) and the single difference IF combined ambiguity \(\Delta A_{IF}^{{}}\) obtained from the orbit determination are added into Formula (3):
where \(\Delta \tilde{A}_{IF}^{{}} = \tilde{A}_{{{\text{r}};IF}}^{{{\text{s}}_{i} }} - \tilde{A}_{{{\text{r}};IF}}^{{{\text{s}}_{j} }}\), si and sj are BDS3 satellites tracked by the receiver at the same time, \(\tilde{A}_{{{\text{r}};IF}}^{{{\text{s}}_{i} }} = A_{{{\text{r}};IF}}^{{{\text{s}}_{i} }} + \left( {\delta_{{\text{r;IF}}} - \delta_{{{\text{IF}}}}^{{{\text{s}}_{i} }} } \right) - \left( {\gamma_{{\text{r;IF}}} - \gamma_{{{\text{IF}}}}^{{{\text{s}}_{i} }} } \right)\) is the IF ambiguity obtained by POD, \(\delta_{{\text{r;IF}}}\), \(\delta_{{{\text{IF}}}}^{{{\text{s}}_{i} }}\), \(\gamma_{{\text{r;IF}}}\), \(\gamma_{{{\text{IF}}}}^{{{\text{s}}_{i} }}\) are IF combinations of the pseudorange and carrier phase hardware delays at receiver- and satellite-end, \(\tilde{N}_{1}^{{}}\) is narrow-lane ambiguity including satellite and receiver hardware delays. Since the IF ambiguity determined by POD using satellite precision orbit, clock and bias products does not include satellite hardware delay theoretically, that is \(\delta_{{{\text{IF}}}}^{{{\text{s}}_{i} }} \approx 0\), \(\gamma_{{{\text{IF}}}}^{{{\text{s}}_{i} }} \approx 0\), the narrow-lane ambiguity is basically not affected by satellite hardware delay [13]. The receiver hardware delay can be eliminated by difference, and the single-difference narrow-lane ambiguity \(\Delta N_{1}^{{}}\) can be fixed to its nearest integer \(\left[ {\Delta N_{1}^{{}} } \right]\) by rounding.
Finally, the fixed single-difference wide- and narrow-lane ambiguities, \(\left[ {\Delta N_{{{\text{wl}}}} } \right]\) and \(\left[ {\Delta N_{1}^{{}} } \right]\), is substituted into Formula (5), and the fixed single-difference IF combined ambiguity is obtained. This IF ambiguity is added to the orbit determination equation as a constraint, and the LEO orbit under the integer ambiguity resolution can be obtained.
For BDS3 satellites, there exist differences in the number of tracking stations corresponding to different satellites, resulting in differences in the precision orbit and clock error accuracy of different BDS3 satellites [14, 15]. Considering that the precision of BDS3 precise orbit and clock products will affect the determination of undifferenced IF ambiguity, the weak accuracy of orbit and clock product for some BDS3 satellites will cause single-difference narrow-lane ambiguity to be incorrectly fixed and reduce the orbit accuracy of LEOs. Figure 1 shows the double-difference clock for some BDS3 satellites in GFZ, WHU and CODE multi-GNSS clock products, with C19 satellite as the benchmark. There is no obvious jump in the BDS3 double-difference clock offset for CODE and WHU products. However, the double-difference clock offset of C37 satellite for GFZ has a jump of about 0.5 ns near 1:00, and the C37 satellite clock offset provided by GFZ is missing from 1:00 to 1:05.

Double difference of GFZ, WHU and CODE multi-GNSS clock product (DOY 249, 2021)
To weak the influence of the anomaly navigation satellite product on the ambiguity fixing, we take the carrier phase residual RMS of all tracking arcs as threshold, and take the tracking arcs whose residual RMS is less than the threshold as the reference arcs. The undifferenced ambiguity belong to the reference arcs is taken as the reference ambiguity. The single-difference ambiguity is constructed by differentiating the reference ambiguity and the undifferenced ambiguity in the remaining arcs with common-view satellites. This method will avoid the influence of the anomaly of BDS3 satellite ephemeris and clock products on the ambiguity fixing performance and ensure the reliability of the ambiguity-fixed results.
3 Orbit Determination Strategy
Using the BDS3 B1I&B3I observation tracked by Tianhui 02-02A (TH02-02A) and Tianhui 02-02B (TH02-02B) satellites from September 2 to 30, 2021 (Day of year 245-273), we carried out the reduced-dynamic POD of BDS3 with float ambiguity and single-receiver ambiguity-fixing. The satellite formation of Tianhui 02-02 is a supplement to Tianhui 02-01, which is the first interferometric synthetic aperture radar satellite system in China. These twin satellites have basically the same structure, and operate together in the sun synchronous orbit with an orbital height of 527 km. The distance between the two satellites is about 500–800 m. The formation adopts the helix-like flight configuration. The multi-GNSS receiver on this satellite system can track up to 12 GPS and BDS3 satellites simultaneously, including GPS G01-G32 and BDS3 C19-C46 satellites. To ensure the success rate of ambiguity fixing, the thresholds of single-difference wide- and narrow-lane ambiguity rounding residual are set to 0.25 and 0.15 cycles, respectively, and the shortest common view duration of the tracking arcs is set to 7 min. Table 1 shows the observation data, dynamic model and parameter settings used for TH02-02 satellite orbit determination.
4 Result Evaluation
4.1 Ambiguity Fixing Performance
Considering that the random errors in the observation, ephemeris and clock will affect the single-receiver ambiguity fixing effect, it is necessary to analyze the residuals obtained by rounding the single-difference ambiguities, and examine whether the single-difference wide- and narrow-ambiguities based on the BDS3 data have integer property. Figure 2 shows the residuals of single-difference wide- and narrow-ambiguities determined by the MW and IF ambiguities. The mean values of the residuals of the single-difference wide- and narrow-lane ambiguities are around 0, and the standard deviations are close to 0.1 and 0.2 cycles. Compared to the wide-line ambiguity, the distribution of residual for narrow-line ambiguity is more dispersed. Since the single-difference narrow-lane ambiguity is composed of the single-difference fixed wide-lane and IF ambiguities, the fixed effect is affected by the accuracy of BDS3 satellite product and the prior LEO orbit simultaneously, thus the single-difference narrow-lane ambiguity residual has a larger standard deviation [22].

Distribution of BDS3 wide- and narrow-line ambiguity residuals on DOY 245-273, 2021. Numbers in the top left corners represent the mean and standard deviation of residuals
Taking the ratio of number of the ambiguity, whose rounding residuals are less than the threshold, to the whole number of ambiguity to be the success rate of ambiguity fixing, we evaluate the performance of single-receiver ambiguity fixing method. Figure 3 shows the success rate of single-receiver BDS3 wide- and narrow-lane ambiguity fixing from DOY 245-273, 2021. The success rate of the wide- and narrow-line ambiguities for all arcs is more than 95% and 75%, and the average success rate of the wide- and narrow-line ambiguity fixing is 98% and 89%.

Success rates of BDS3 wide- and narrow-line ambiguity fixing
4.2 Orbit Evaluation
With the TH02-02 GPS-based POD result with single-receiver ambiguity fixing as a reference, we evaluate the precision of BDS3-based POD by orbit comparison, and analyze the improvement of BDS3 single-receiver ambiguity fixing to orbit. For the reference orbit, the three-dimensional RMS (3D RMS) of 6 h overlapping comparison is better than 0.2 cm, and the success rate of GPS wide- and narrow-lane ambiguity fixing is close to 95% [23]. In the orbit comparison, 24 h in the middle of the 30 h arc is chosen as the comparison period. Figure 4 shows the RMS of orbit difference between the BDS3-based POD results of TH02-02A and TH02-02B satellites and the reference orbit on DOY 245-273, 2021. The orbit accuracy of the ambiguity-fixed solutions in along-track and normal directions at different arcs are higher than the corresponding float ambiguity solutions. With ambiguity fixing, the orbit accuracy of the two satellites has been improved by 26%, 42% and 52% in the radial, along-track and normal directions, and the average RMS of the three-dimensional orbit difference is improved from 2.5 cm to 1.4 cm.

RMS of orbit difference of ambiguity-fixed and float ambiguity solutions relative to reference orbit for TH02-02 satellites
Besides orbit comparison, overlap comparison is also a common mean to evaluate the precision of orbit determination results. We use 6 h overlapping orbits by two adjacent arcs to evaluate the impact of ambiguity fixing on POD. Figure 5 shows the overlap comparisons of ambiguity-fixed and float ambiguity solutions for TH02-02A satellite on a typical day. Due to the lack of observation data at the orbit boundary, the precision of the float solution near the beginning and end of the overlap period is poor. However, the ambiguity fixing enhances the geometric constraint of observation. There is no significant fluctuation in the overlapping orbits at different times. The 3D RMS of the overlapping comparison decrease from 1.0 cm for the float ambiguity processing to 0.8 cm for the ambiguity-fixed orbit for TH02-02A and TH02-02B satellites from DOY 245-273, 2021. Both orbit and overlap comparisons show that ambiguity fixing can enhance the precision of BDS3-based POD for LEOs.

6 h overlap comparison between ambiguity-fixed and float ambiguity solutions for TH02-02A on DOY 260, 2021. Numbers in the top right corners represent the mean and standard deviation
4.3 Baseline Evaluation
As a surveying and mapping satellite system based on interferometric synthetic aperture radar technology, the high-precision inter-satellite baseline determination for TH02-02 satellite formation is a prerequisite for generating Earth surveying products. Therefore, it is necessary to analyze the impact of single-receiver BDS3 ambiguity fixing on inter-satellite baseline. We build a double-difference observation equation by spaceborne GPS data to eliminate common errors such as clock error and hardware error, and perform the GNSS-based double-difference precise relative orbit determination to obtain baseline. The double-difference carrier phase IF ambiguity is fixed by the strategy of fixing the wide- and narrow-ambiguities step by step. Based on the above method, the accuracy of TH02-02 satellite baseline product is at millimeter level [24, 25]. Taking the inter-satellite baseline products determined by precise relative orbit determination as a reference, we evaluated the baseline products obtained by the differential orbits from TH02-02A and TH02-02B satellites. Figure 6 shows the evaluation results of float ambiguity and ambiguity-fixed baseline solutions obtained by orbit difference. Compared to the result of float ambiguity solution, the accuracy of baseline derived from the ambiguity fixed solution are improved by 27%, 45% and 46% in the radial, tangential and normal directions, respectively, and the 3D RMS of baseline difference is improved from 7.6 mm to 4.3 mm. The above results show that single-receiver ambiguity fixing can also improve the accuracy of inter-satellite baseline products.

RMS of baseline difference between differential orbit and precise relative orbit determination solution. Numbers in the top left corners are the mean value of RMS for all arcs
5 Conclusion
Considering the difference of orbit and clock product between different BDS3 satellites, we propose a single-receiver ambiguity fixing method. The ambiguity fixing performance and POD results are assessed by using TH02-02 spaceborne BDS3 data. This method chooses the tracking arcs, whose RMS of carrier phase residual are less than the mean value, to be references, and makes single-difference ambiguities between the reference and remaining tracking arcs with common-view satellites. This method avoids the impact of anomalies satellite product on the ambiguity fixing. The result of ambiguity fixing shows that the average success rate of the BDS3 wide- and narrow-line ambiguity fixing of is 95% and 89%. Taking the GPS-based single-receiver ambiguity-fixed solution as a reference, the orbit comparison results show that the accuracy of the BDS3-based POD solution with fixed ambiguity is improved by 26%, 42% and 52% compared to that with float ambiguity in the radial, along-track and normal directions. The accuracy of BDS3-based POD can be improved from 2.5 cm to 1.4 cm with ambiguity fixing. Choosing the baseline determined by the GPS-based double-difference precise relative orbit determination as a reference, the accuracy of baseline generated by the differential orbit for the ambiguity-fixed solution is improved by 27%, 45% and 46% compared to that for the float ambiguity solution in the radial, along-track and normal directions. The single-receiver ambiguity fixing for LEOs can significantly improve the precision of BDS3-based POD and inter-satellite baseline. In the future, the performance of single-receiver ambiguity fixing with GPS+BDS3 observation will be further analyzed, and the impact of ambiguity fixing on multi-GNSS data fusion will be discussed.
References
Allahvirdi-Zadeh A, Wang K, El-Mowafy A (2022) Precise orbit determination of LEO satellites based on undifferenced GNSS observations. J Surv Eng 148(1):03121001
Li M, Li W, Shi C et al (2017) Precise orbit determination of the Fengyun-3C satellite using onboard GPS and BDS observations. J Geodesy 91(11):1313–1327
Qing Y, Lin J, Liu Y et al (2020) Precise orbit determination of the China seismo-electromagnetic satellite (CSES) using onboard GPS and BDS observations. Remote Sens 12:3234
Zhang H, Gu D, Ju B et al (2021) Precise orbit determination and maneuver assessment for TH-2 satellites using spaceborne GPS and BDS2 observations. Remote Sens 13:5002
Zhao X, Zhou S, Ci Y et al (2020) High-precision orbit determination for a LEO nanosatellite using BDS-3. GPS Solutions 24(4):102
Li M, Mu R, Jiang K et al (2022) Precise orbit determination for the Haiyang-2D satellite using new onboard BDS-3 B1C/B2a signal measurements. GPS Solutions 26(4):1–12
Ge M, Gendt G, Rothacher M et al (2008) Resolution of GPS carrier-phase ambiguities in Precise Point Positioning (PPP) with daily observations. J Geodesy 82(7):389–399
Laurichesse D, Mercier F, Berthias JP et al (2009) Integer ambiguity resolution on undifferenced GPS phase measurements and its application to PPP and satellite precise orbit determination. Navig, J Inst Navig 56(2):135–149
Collins P, Bisnath S, Lahaye F et al (2010) Undifferenced GPS ambiguity resolution using the decoupled clock model and ambiguity datum fixing. Navig, J Inst Navig 57(2):123–135
Montenbruck O, Hackel S, Jäggi A (2018) Precise orbit determination of the sentinel-3A altimetry satellite using ambiguity-fixed GPS carrier phase observations. J Geodesy 92(7):711–726
Zhang K, Li X, Wu J et al (2021) Precise orbit determination for LEO satellites with ambiguity resolution: improvement and comparison. J Geophys Resh: Solid Earth 126(9):e2021JB022491
Geng J, Yang S, Guo J (2021) Assessing IGS GPS/Galileo/BDS-2/BDS-3 phase bias products with PRIDE PPP-AR. Satell Navig 2(1):17
Shao K, Yi B, Zhang H et al (2021) Integer phase clock method with single-satellite ambiguity fixing and its application in LEO satellite orbit determination. Acta Geodaetica et Cartographica Sinica 50(4):487–495
Li X, Zhu Y, Zheng K et al (2020) Precise orbit and clock products of Galileo, BDS and QZSS from MGEX since 2018: comparison and PPP validation. Remote Sens 12:1415
Shen P, Cheng F, Lu X et al (2021) An investigation of precise orbit and clock products for BDS-3 from different analysis centers. Sensors 21:1596
Rebischung P, Schmid R (2016) IGS14/igs14.atx: a new framework for the IGS products. In: AGU fall meeting 2016
Wu J-T, Wu SC, Hajj GA et al (1992) Effects of antenna orientation on GPS carrier phase. In: AAS/AIAA astrodynamics conference. pp 1647–1660 , San Diego, CA
Ries JC, Eanes R, Kang Z et al (2016) The development and evaluation of the Global Gravity Model GGM05
McCarthy D, Petit G (2004) IERS Conventions (2003)
Lyard F, Lefevre F, Letellier T et al (2006) Modelling the global ocean tides: modern insights from FES2004. Ocean Dyn 56(5):394–415
Jacchia LG. (1971) Revised static models of the thermosphere and exosphere with empirical profiles
Loyer S, Perosanz F, Mercier F et al (2012) Zero-difference GPS ambiguity resolution at CNES-CLS IGS analysis center. J Geodesy 86(11):991–1003
Zhang H, Ju B, Gu D et al (2023) Precise orbit determination for TH02–02 satellites based on BDS3 and GPS observations. Chin J Aeronaut
Shao K, Zhang H, Qin X et al (2021) Precise absolute and relative orbit determination for distributed InSAR satellite system. Acta Geodaetica et Cartographica Sinica 50(5):580–588
Yi B, Gu D, Shao K et al (2021) Precise relative orbit determination for Chinese TH-2 satellite formation using onboard GPS and BDS2 observations. Remote Sens 13:4487
Acknowledgments
This study is funded by the National Key R&D Program of China (No. 2020YFA0713502). This work is also supported by the Key Laboratory Found (No. 6142210200105).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 Aerospace Information Research Institute
About this paper

Cite this paper
Zhang, H., Shao, K., Duan, X. (2024). BDS3-Based Precise Orbit Determination for LEO Satellites with Single-Receiver Ambiguity Fixing. In: Yang, C., Xie, J. (eds) China Satellite Navigation Conference (CSNC 2024) Proceedings. CSNC 2024. Lecture Notes in Electrical Engineering, vol 1094. Springer, Singapore. https://doi.org/10.1007/978-981-99-6944-9_11
Download citation
DOI: https://doi.org/10.1007/978-981-99-6944-9_11
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-6943-2
Online ISBN: 978-981-99-6944-9
eBook Packages: EngineeringEngineering (R0)