
Abstract
Here we numerically investigated the deformation kinematics of a ferro-droplet in the joint dominance of uniform magnetic field and uniaxial extensional flow. Coupled the phase-field technique with the Cahn–Hilliard-Navier–Stokes equation into our two-dimensional model, we have captured important interfacial dynamic characteristics for an extensive range of governing parameters. It is seen that the droplet can monotonically evolve into a prolate or oblate shape based on the relative magnitude between magnetic stress and hydrodynamic stress. This study further shows that the magneto-physical properties of the dispersed phase play a significant role in controlling the morphology of the droplet. This study can help to understand the various operations related to various process engineering and biomedical applications such as modifying emulsion rheology, delivering drugs, and others.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
Immense industrial and biomedical applications (e.g., polymer processing, magnetically controlled optics, ferrofluid-based sensors, biomedical imaging, drug delivery, and diagnosis of malignant tumors) make the droplet magnetohydrodynamics an emerging area of research for the last few decades [1,2,3,4,5].
In the case of the flow field, the droplet deformation depends on the nondimensional capillary number (Ca), which signifies the ratio between viscous force (that tries the droplet to deform) and the interfacial force (that maintains the droplet to its initial spherical shape). Following the pioneering research (on the droplet dynamics of Newtonian fluid under the governance of background flow in a small deformation regime) of Taylor [6], Han and Chin [7] experimented to show the deformation and breakup characteristics of the droplet in extensional flow. Here they considered both the droplet phase and continuous phase to be viscoelastic and showed the effects of different fluid properties (such as viscosity, elasticity, and interfacial tension) on the deformation dynamics. Moreover, droplet breakups in linear flows have been adequately examined numerically as well as experimentally by Stone [8]. Furthermore, Delaby et al. [9] experimentally exhibited the importance of the viscosity ratio on the deformation dynamics of a droplet in immiscible molten polymer blends for higher Ca limits. Minale [10] analytically shows the droplet deformation considering (i) both the phases are Newtonian, (ii) one of the phases is non-Newtonian, and (iii) considering the confined system where wall effects have been considered.
Similarly, the sole impact of a uniform magnetic field on the ferro-droplet has been thoroughly addressed in the literature [11,12,13]. On a brief note, the appearance of a magnetic field makes the ferro-droplet unstable and expands along with the applied magnetic field orientation [14]. In this context, Afkhami et al. [12, 13] analytically showed the dependency of the aspect ratio (ratio between the length of major and minor axes) of the deformed droplet on the magneto-physical properties of the ferrofluid. A complete numerical study on hysteresis phenomena for the ferro-droplet deformation in a uniform magnetic field has been studied by Lavrova et al. [15].
The dynamics of a neutrally buoyant droplet in the presence of the magnetic field or extensional flow are independently reported in the literature. The droplet dynamics in the combined effect of magnetic field and uniaxial extensional flow can provide many physical imaginations on the fluid mixing controllability. Motivated by this, here we propose to see the impact of the uniform magnetic field in the background uniaxial extensional flow on the ferro-droplet dynamics. Considering Stokes flow, the magnetohydrodynamic problem is solved by following numerical simulations in the small deformation limit.
2 Problem Formulation
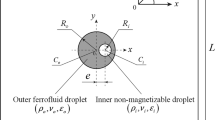
Here, we considered a Newtonian ferrofluid droplet of radius ri, density ρ, viscosity ηi, and magnetic susceptibility χi, placed in another Newtonian, non-magnetic fluid of viscosity ηe and density ρ (neutrally buoyant) as shown in Fig. 1. The droplet is directed by an externally employed magnetic field \(\overline{\user2{H}}_{0} = H_{0} {\varvec{e}}_{z}\) and uniaxial extensional flow \(\overline{\user2{U}}_{0} = \user2{\overline{\rm T}}_{0} \cdot \overline{\user2{X}}\). Here, \(H_{0}\) is the magnitude of the applied magnetic field, \(\user2{\overline{\rm T}}_{0}\) is the rate of the strain tensor, and \(\overline{\user2{X}}\) is the position vector. The far-field strain rate tensor \(\user2{\overline{\rm T}}_{0} \user2{ }\) can be defined as:

Schematic representation of the problem description
where G0 is the rate of strain. Further, we considered the surface tension σ is uniform along with the droplet interface.
2.1 Governing Equations
The velocity field for an incompressible flow satisfies the continuity and Navier–Stokes equation as [16, 17]:
Here FST and FM represent the force due to surface tension and magnetic force, respectively. The surface tension force, FST can be described as [18]:
where I, δ, and n are the second-order identity tensor, Dirac delta function, and unit normal to the interface. Similarly, the force due to magnetic field, FM can be defined as [18]:
In the above equation, H, τM, and µm are the strength of the applied magnetic field, magnetic stress tensor, and the magnetic permeability of the fluid, respectively. To find the magnetic stress tensor, we need to solve the magneto-static Maxwell equations as given below [18].
where µ0 (µ0 = 4π × 10−7 N/A2) is the permeability of the vacuum. B, M, and χm are magnetic induction, magnetization, and magnetic susceptibility, respectively.
2.2 Nondimensionalization
To nondimensionalize, we have considered the following scales: length—ri, velocity—G0ri, magnetic field strength—H0, hydrodynamic stress—ηeG0, and magnetic stress—µ0H02. Here we assumed that the viscous force is ruling over the inertia force, resulting in a low Reynolds number flow. We have tabulated all the dimensionless parameters and nondimensional numbers in Table 1.
3 Numerical Method
In this study, we used the phase-field technique to resolve the two-phase interface features. Phase-field model for a system of two incompressible and immiscible fluids can be described as [19]:
where Mψ(x,t) and G denote the interface mobility factor and chemical potential, respectively. Two fluids are distinguished by the definite values of the phase-field parameter ψ(x,t). The values of the phase-field parameter for suspending fluid phase and droplet phase are taken as −1 and +1, respectively; whereas it varies from −1 to +1 at the two-phase interface.
The magnetic potential follows Poisson’s equation in the following form [18]:
where \({\mu }_{m}\) is the magnetic permeability of the fluid which can be presented in terms of the phase-field parameter as
For simulations, a square channel of size L × L is considered (here L = 10ri to neglect the effect of channel confinement), where the droplet is situated at the center of the left side (axis of symmetry) as shown in Fig. 2.

Schematic representation of the computational domain
3.1 Grid Independence and Cahn Number Independence Test
To check the precision of the simulation results, the grid independence and Cahn number (Cn) independence assessments are necessary. In our model, the grid size and the Cahn number are similar and close to the two-phase interface. So, an accurate grid independence study automatically confirms a correct Cahn number independence analysis [20]. For the Cahn number independence study, we have compared the temporal droplet deformation in presence of uniaxial flow as illustrated in Fig. 3. This figure confirms that the droplet deformation is almost the same for three different values of the Cahn number. Eventually, we considered Cn = 0.04 for the rest of our analysis.

Alteration of the droplet deformation for different Cahn numbers (Cn) at Ca = 0.05, λ = 1 in the sole presence of uniaxial extensional flow
3.2 Model Validation
For validation, we have compared the deformation parameter D [where D = (l − b)/(l + b); l and b are the lengths of the major and minor axis of the deformed droplet, respectively] with the previously reported results for two cases: (a) droplet deformation in existence of uniaxial extensional flow only and (b) droplet deformation in the sole presence of the uniform magnetic field. Figure 4a shows the steady-state droplet deformation (Dα) for different Ca values at λ = 1, which confirms that our numerical model is in harmony with the simulation of Stone and Leal [21]. Figure 4b depicts the alteration of droplet deformation at the steady-state (Dα) with the magnetic Bond number (Bom) for µr,i = 1.89. After comparison, we found that our numerical model is in the same fashion as the experimental results of Afkhami et al. [13] for Bom < 1.5.

Alteration of the droplet deformation at the steady-state (Dα) with a Capillary number Ca at λ = 1 in uniaxial extensional flow and b Magnetic Bond number Bom for (µr,i, µr,e) = (1.89, 1) in sole existence of uniform magnetic field
4 Results and Discussion
In external flow conditions, the viscosity ratio plays a pivotal role in the deformation dynamics of a droplet. Figure 5 confirmed the impact of the viscosity ratio on the droplet deformation in the Stokes flow regime (here, Re = 0.01). It can be seen that at a fixed Ca value (here, Ca = 0.05), as the viscosity ratio (λ) increases from 0.01 to 5, the deformation parameter (D) also increases. Contrariwise, the time taken to reach steady-state deformation is smaller at the lower viscosity ratio. Another important observation is that for λ ⩽ 1, the temporal evolution of the droplet deformation is almost independent of the viscosity ratio. More precisely, the droplet deformation plot at λ = 0.01 almost coincides with that at λ = 0.1. Considering these aspects, we considered λ = 1 to see the droplet deformation characteristics for the rest of the analysis.

Effect of viscosity ratio (λ) on the droplet deformation (D) for Ca = 0.05, M = 0, and Re = 0.01
Figure 6a illustrates the transient droplet deformation for (μr,i, μr,e) = (2, 1) and λ = 1 for different Mason numbers and α = 90°. In absence of a magnetic field (i.e., M = 0), the drop deforms into a prolate shape due to the hydrodynamic stress distribution. For all M > 0 at α = 90°, both the magnetic stress and the hydrodynamic stress are acting in the same direction which assists the droplet to deform into a prolate shape. Moreover, the deformation increases with increasing magnetic field strength. Figure 6b depicts the alteration of transient deformation of the ferro-droplet for (μr,i, μr,e) = (2, 1) and λ = 1 with different Mason numbers at α = 0°. Here the magnetic stress tries to resist the prolate deformation aided by hydrodynamic stress. For this reason, the deformation for all M > 0 is less when compared with M = 0. Fascinatingly, here we observed two distinct droplet shape deformations. For M = 0, 1, and 5, it forms a prolate shape, whereas, for higher values of M (= 10, 20), it deforms into an oblate shape. The prolate shape formation is because of the higher viscous force compared with the magnetic force. While, for M = 10 and 20, the magnetic stress becomes relatively high so that it overcomes the viscous force and deformed the droplet into an oblate shape.

Alteration of droplet deformation (D) with time for (µr,i, µr,e) = (2, 1) and λ = 1 for different Mason numbers. a α = 90°and b α = 0°. Other parameters are Ca = 0.05 and Re = 0.01
The relative magnetic permeability of a material represents the ability of that material to be magnetized in presence of an external magnetic field. The magnetic force exerted on a ferrofluid droplet directly depends on its relative magnetic permeability. Hence, the relative magnetic permeability has a key role in droplet morphology alteration. Figure 7a represents that for a system with α = 90°, the droplet deformation (D) increases monotonically with the relative magnetic permeability at a fixed magnetic field strength. This observation follows a similar trend as reported in the literature [22]. This is because the magnetic stress attributed to the droplet pole increases with an increase in relative magnetic permeability. Consequently, the magnetic force dominates the surface tension force and thus the droplet becomes more elongated along the direction of the magnetic field and forms a prolate shape with a high aspect ratio. Interestingly, for the system (M, α) = (1, 0°) as shown in Fig. 7b, the droplet morphology evolved from prolate to oblate shape with the increase of relative magnetic permeability from 1 to 10. This is because with the increase of μr,i, the magnetic stress becomes high and it governs the flow dynamics. As a result, the droplet follows the magnetic field direction and formed an oblate shape.

Alteration of droplet deformation (D) with time for different relative magnetic permeability of the droplet phase (μr,i) for a (M, α) = (1, 90°) and b (M, α) = (1, 0°). Other parameters are μr,e = 1, Ca = 0.05, λ = 1, and Re = 0.01
5 Conclusions
In summary, the transient dynamics of a ferro-droplet guided by the uniform magnetic field in background uniaxial extensional flow has been studied numerically. Based on the outcomes, the major findings are as follows:
-
The droplet deforms into a prolate shape for α = 90°. On the contrary, for α = 0°, the droplet may deform into either a prolate or oblate shape depending on the Mason number.
-
For the system with α = 90°, the droplet elongates more with the higher relative magnetic permeability and forms the prolate shape. Whereas, an enhancement of relative magnetic permeability can change the droplet morphology from the prolate to an oblate shape at α = 0°.
Abbreviations
- Bom:
-
Magnetic Bond number
- Cn:
-
Cahn number
- Ca:
-
Capillary number
- λ:
-
Viscosity ratio
- M:
-
Mason number
- µr:
-
Relative magnetic permeability
- Re:
-
Reynolds number
- i:
-
Droplet phase
- e:
-
Suspending medium
References
Garstecki P, Stone HA, Whitesides GM (2005) Mecism for flow-rate controlled breakup in confined geometries: a route to monodisperse emulsions. Phys Rev Lett 94(16):164501
Dutz S, Clement JH, Eberbeck D, Gelbrich T, Hergt R, Muller R, Wotschadlo J, Zeisberger M (2009) Ferrofluids of magnetic multicore nanoparticles for biomedical applications. J Magn Magn Mater 321(10):1501–1504
Torres-D´ıaz I, Rinaldi C (2014) Recent progress in ferrofluids research: novel applications of magnetically controllable and tunable fluids. Soft Matter 10(43):8584–8602
McClements DJ (2015) Emulsion stability, food emulsions. CRC Press, pp 314–407
Bhattacharjee D, Atta A, Chakraborty S (2022) Magnetic field altered ferrofluid droplet deformation in the uniaxial extensional flow. B Am Phys Soc
Taylor GI (1932) The viscosity of a fluid containing small drops of another fluid. Proc R Soc Lond Ser A 138(834):41–48
Chin BH, Han DC (1979) Studies on droplet deformation and breakup. I. Droplet deformation in extensional flow. J Rheol 23(5):557–590
Stone HA (1994) Dynamics of drop deformation and breakup in viscous fluids. Annu Rev Fluid Mech 26(1):65–102
Delaby I, Ernst B, Germain Y, Muller R (1994) Droplet deformation in polymer blends during uniaxial elongational flow: Influence of viscosity ratio for large capillary numbers. J Rheol 38(6):1705–1720
Minale M (2010) Models for the deformation of a single ellipsoidal drop: a review. Rheol Acta 49(8):789–806
Rosensweig RE (1985) Ferrohydrodynamics. Cambridge University Press
Afkhami S, Renardy Y, Renardy M, Riffle JS, St Pierre T (2008) Field-induced motion of ferrofluid droplets through immiscible viscous media. J Fluid Mech 610:363–380
Afkhami S, Tyler AJ, Renardy Y, Renardy M, St Pierre TG, Woodward RC, Riffle JS (2010) Deformation of a hydrophobic ferrofluid droplet suspended in a viscous medium under uniform magnetic fields. J Fluid Mech 663:358–384
Liu J, Yap YF, Nguyen NT (2011) Numerical study of the formation process of ferrofluid droplets. Phys Fluids 23(7):072008
Lavrova O, Polevikov V, Tobiska L (2005) Equilibrium shapes of a ferrofluid drop. Proceedings in applied mathematics and mechanics, vol 5. Wiley Online Library, pp 837–838
Bhattacharjee D, Atta A (2022) Topology optimization of a packed bed microreactor involving pressure driven non-Newtonian fluids. React Chem Eng 7(3):609–618
Bhattacharjee D, Chakraborty S, Atta A (2022) Passive droplet sorting engendered by emulsion flow in constricted and parallel microchannels. Chem Eng Process Process Intensif 181:109126
Md Hassan R, Zhang J, Wang C (2018) Deformation of a ferrofluid droplet in simple shear flows under uniform magnetic fields. Phys Fluids 30(9):092002
Santra S, Mandal S, Chakraborty S (2018) Electrohydrodynamics of confined two-dimensional liquid droplets in uniform electric field. Phys Fluids 30(6):062003
Mandal S, Ghosh U, Bandopadhyay A, Chakraborty S (2015) Electroosmosis of superimposed fluids in the presence of modulated charged surfaces in narrow confinements. J Fluid Mech 776:390–429
Stone HA, Leal LG (1989) Relaxation and breakup of an initially extended drop in an otherwise quiescent fluid. J Fluid Mech 198:399–427
Ghaffari A, Hashemabadi SH, Bazmi M (2015) Cfd simulation of equilibrium shape and coalescence of ferrofluid droplets subjected to uniform magnetic field. Colloids Surf, A 481:186–198
Acknowledgements
D.B. thanks Dr. Somnath Santra for his insight on numerical analyses. S.C. acknowledges the Sir J. C. Bose National Fellowship awarded by the DST, Government of India.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Bhattacharjee, D., Atta, A., Chakraborty, S. (2024). Evolution of Ferrofluid Droplet Deformation Under Magnetic Field in a Uniaxial Flow. In: Singh, K.M., Dutta, S., Subudhi, S., Singh, N.K. (eds) Fluid Mechanics and Fluid Power, Volume 5. FMFP 2022. Lecture Notes in Mechanical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-99-6074-3_42
Download citation
DOI: https://doi.org/10.1007/978-981-99-6074-3_42
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-6073-6
Online ISBN: 978-981-99-6074-3
eBook Packages: EngineeringEngineering (R0)