
Abstract
Multi-purpose forest fire fighting vehicles consists of many interconnected parts, each with its own mass and oscillatory characteristics. When the vehicle is operating on a forest road, it vibrates, reducing the smoothness of the movement, causing dynamic loads, and at the same time making the chassis more torsion. In addition, when working on forest roads with poor road surface quality or steep hills, the body of the vehicle appears to oscillate, causing instability, and the pitch and roll angles of the body are large, which can lead to the vehicle rolling over. Simultaneously with the horizontal oscillations are the vertical oscillations, which adversely affect the driver as well as the fire extinguishing systems on the vehicle. This paper presents the results of research on the influence of road quality on the oscillation of Multi-purpose forest fire fighting vehicles. The results of the vehicle oscillation survey have found the reasonable working mode of the vehicle in different forest ground irregularities, which are: On class C roads, the vehicle should be driven at a speed v ≤ 15 km/h, and on class D and E roads, we let the vehicle run at a speed of v ≤ 10 km/h.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
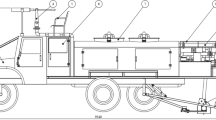
Multi-purpose forest fire fighting vehicle is manufactured by Vietnam which is the type of equipment that integrates many forest fire fighting functions including cutting trees, cleaning garbage grass, open roads to create a fire isolation corridor; fire sprinkler with wide spray area; formulate high-pressure wind spray on the fire, using sandy soil in place of fire extinguishing. Lead to oscillations can cause high-stress concentration resonance on the frame destruction structure or may cause fatigue on the frame during operation [1,2,3,4,5] (Figs. 1 and 2).


According to ISO 2631 [6, 7] smoothness to the user considering the combination of acceleration, frequency, and duration of impact, acceleration can be used as an evaluation criterion: very smooth 1.6 m/s2, smooth 3.15 m/s2, working limit 6.3 m/s2.
2 Building a Oscillating Model
When building a multi-purpose forest fire fighting vehicle oscillation model, several assumptions must be made. These assumptions make the research and calculation process simpler but do not lose the generality of the problem, ensuring the necessary accuracy. The basic assumptions when building the model are as follows: The mass of the vehicle is distributed symmetrically about the longitudinal plane; on a vehicle full of water in the tank and consider the water in the tank as a solid block because the tank is divided into many small compartments; the sprung mass and unsprung mass is considered to be rigid; the contact of the wheel with the forest ground is point contact; the vehicle moves in a straight line with constant speed; neglect the slip of the wheels (Fig. 3).

Oscillation model of a multi-purpose forest fire fighting vehicle [2]
Using Newton–Euler equations to build a system of dynamic equations for a multi-purpose forest fire fighting vehicle as follows [1, 4, 5]:
To evaluate the oscillation of the vehicle, the author uses Matlab-Simulink software to investigate the influence of movement speed and road quality on the acceleration of the body, pitch angle, and roll angle of the body when the vehicle is loaded with water (full load) and vehicle without water (doesn’t load), moving at v = [10, 15, 20] km/h on medium quality (C), bad (D) and very bad (E) roads according to ISO 8608:2016 [8] (Fig. 4).

Road surface according to ISO 8608:2016 standards [8]
3 Verification Survey of Multi-purpose Forest Fire Fighting Vehicle
3.1 Effect of Vehicle Speed
Surveying with different moving speeds of multi-purpose forest fire vehicle, in this study, the survey with 3 speeds is v = 10 km/h; v = 15 km/h and v = 20 km/h, lawn mower working, the vehicle doesn’t load and full load, traveling on type C road according to ISO 8608:2016. The results of the theoretical investigation are shown in Fig. 5.

Survey results of vehicle body oscillation acceleration
Through the survey, we find that when the speed increases, the acceleration of the body oscillation increases, but is still within the allowable range [6, 7], when the vehicle is a full load, the body oscillation acceleration is smaller than when a vehicle doesn’t load. Similar to the vehicle body oscillation acceleration, so the influence of the vehicle's speed on the pitch angle of the vehicle body in two cases: When the vehicle doesn’t load and when the vehicle is a full load and with speeds v = 10, 15 and 20 km/h when the vehicle moves on the road class C according to ISO 8608:2016. The results of the survey on the influence of the vehicle's speed on the pitch angle of the vehicle are shown in Fig. 6.

Survey results to determine the pitch angle of the vehicle body
Through the survey, we found that when the movement speed increased, the pitch angle increased, but with the undulation being surveyed, the pitch angle was still within the allowable range. When the vehicle is a full load, the pitch angle is larger than when the vehicle doesn’t load, which proves that due to the influence of water in the water tank, the pitch angle increases.
Similar to when investigating the influence of speed on vehicle body acceleration and pitch angle, the author also surveyed roll angle 3-speed modes and when the vehicle is a full load, the vehicle doesn’t load, on type C road; lawn mower structure working. The results of the survey are shown in Fig. 7.

Survey results to determine the roll angle of the vehicle body
Through the survey results, we find that when increasing the vehicle's speed, the roll angle of the body also increases but is still within the allowable range. When the vehicle is a full load, the body roll angle is also greater than when the vehicle doesn’t load due to the influence of water contained in the water tank. From the survey results, we have a statistical table of the maximum vehicle body oscillation acceleration, the maximum pitch angle, and the maximum roll angle as shown in Table 1.
Through the survey, we have the following observations: When the vehicle is a full load, the body oscillation acceleration is smaller than when the vehicle doesn’t load, but the pitch and roll angle of the body is larger due to the influence of water in the vehicle fire hydrant. When the speed increases, the acceleration of the body oscillation, and the pitch and roll angles of the body all increase but are still within the allowable range, not affecting the fire fighting operation of the vehicle when running in the forest. Therefore, when the vehicle is traveling on a class C road with an average forest ground roughness of about 0.06 m, the speed of movement is 10, 15, or 20 km/h.
3.2 Effect of Road Quality on Vehicle Oscillation
The road surface roughness has a great influence on the vehicle body oscillation acceleration, pitch, and roll angle. It is very important to choose how the vehicle works with the unevenness of the road surface to ensure the safe and effective operation of the vehicle. The average forest surface roughness of Luot mountain, Hoa Binh province is 0.05 m, the average forest surface roughness of Gia Lai province is 0.1 m and the eucalyptus forest of Kon Tum province is 0.15 m [2]. Therefore, in this survey, the author investigates the influence of roads class D, and E according to ISO 8608:2016 to compare and evaluate the oscillations of the vehicle compared to the case of vehicles traveling on class C roads; moving speed of vehicle v = 10 km/h, v = 15 km/h and v = 20 km/h, the vehicle doesn’t load, a lawn mower is working.
3.2.1 Effect on Vehicle Body Oscillation Acceleration
The survey results on the influence of forest ground roughness on the vehicle body oscillation acceleration are shown in Fig. 8.

Effect of road quality on vehicle body oscillation acceleration
From the survey results, we have a statistical table of the largest body oscillation acceleration values when changing the road surface roughness as shown in Table 2.
When increasing the road surface roughness, the acceleration of body oscillation increases, the higher the speed of movement, the greater the acceleration of body oscillation. For class D road, when the vehicle speed is below 20 km/h, the vehicle body oscillation acceleration is still within the allowable range. On class E road, the vehicle body oscillation acceleration exceeds the allowable range.
3.2.2 Effect on the Pitch Angle of the Vehicle Body
The results of the survey on the influence of road surface roughness on the vehicle body pitch angle are shown in Fig. 9 and from that survey result, we have a statistical table of the maximum values of the pitch angle of the vehicle body when changing road surface roughness (Table 3).

Influence of road quality on pitch angle of the body vehicle
When the vehicle is traveling on class C road, the pitch angle of the vehicle body is not large, but when the vehicle is moving on class D and E roads, the pitch angle of the vehicle body is large, especially when increasing the vehicle's movement speed. This affects the working of the fire fighting equipment installed on the vehicle.
3.2.3 Effect on the Roll Angle of the Vehicle Body
The survey results on the influence of road surface roughness on the roll angle of the vehicle body are shown in Fig. 10 and also from the survey results, we have a statistical table of the largest roll angle of the vehicle body when changing the road surface roughness (Table 4).

Effect of road surface roughness on roll angle of the vehicle body
With low average roughness (class C) and a moving speed, of less than or equal to 10 km/h, the roll angle of the vehicle body is not large, but in the medium roughness of the road surface (class D, E road), the roll angle of the vehicle body is large, especially when the vehicle's speed is increased, this affects the stability of the vehicle. Therefore, on class C roads, the vehicle should be driven at a speed v ≤ 15 km/h, and on class D and E roads, we let the vehicle run at a speed of v ≤ 10 km/h.
4 Conclusion
The paper simulated and investigated the vehicle's oscillations with different modes of vehicle speed movement, different surface roughness to acceleration, pitch angle, and roll angle of the vehicle body. The results determined that the survey was working in a reasonable mode for a multi-purpose forest fire fighting vehicle. The survey results show that the quality of the tree felling system installed at the front of the vehicle depends on the pitch angle of the body, when the pitch angle is large, the cutting edge may be broken. Therefore, to overcome this problem, it is necessary to calculate and redesign the coupling between the chassis and the tree felling system so that the tree felling system is not affected by the body shake angle. Thus, surveying the influence of forest ground roughness on vehicle body oscillation acceleration, pitch angle, and roll angle of the vehicle, shows that depending on the roughness of the forest ground, the vehicle's speed is selected accordingly to ensure the durability of the vehicle's details and the stable operation of the vehicle.
References
Van LV (2020) Research on durability chassis of Multi-purpose forest fire fighting vehicle. Doctoral thesis, Vietnam National University of Forestry
Hoi XN (2013) Research dynamics of Multi-purpose forest fire fighting vehicle. Doctoral thesis, Vietnam National University of Forestry
Tung NT, Van LV, Quang NT (2020) Survey on the effects of bumpy road to oscillate of multi-purpose forest fire fighting vehicle. Eng Solid Mech 9(2021):291–298
Van Luong V, Nguyen TQ, Le HQ, Le VA, Tran PH, Nguyen XH, Tran VT (2020) Determination of dynamic loads from the road surface acting on the chassis by experimental methods. IOP Conf Ser Mater Sci Eng
Luong VV, Cao HP, Nguyen TT (2022) Effect of suspension system stiffness on dynamic load action chassis multi-purpose forest fire fighting vehicle. Int J Eng
Nguyen HQ (2017) Research on oscillation of the truck manufactured and assembled in Vietnam during transporting timber on forest road. Doctoral thesis, Vietnam National University of Forestry
ISO 2631: Mechanical oscillation and shock—Evaluation of human exposure to whole-body oscillation
ISO 8608:2016 (2016) Mechanical oscillation—Road surface profiles. Reporting of Measured Data
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Van, L.V., Hau, C.C., Luat, T.N. (2023). The Influence of Road Quality on Oscillating of Multi-purpose Forest Fire Fighting Vehicle. In: Mo, J.P. (eds) Proceedings of the 8th International Conference on Mechanical, Automotive and Materials Engineering. CMAME 2022. Lecture Notes in Mechanical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-99-3672-4_8
Download citation
DOI: https://doi.org/10.1007/978-981-99-3672-4_8
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-3671-7
Online ISBN: 978-981-99-3672-4
eBook Packages: EngineeringEngineering (R0)