
Abstract
The electrical fault diagnosis and state estimation are curial tasks for lithium-ion battery pack based electric drive system. The electrical fault of batteries will lead to abnormal state estimation. Considering the computational cost and limited memory sources of the on-board battery management system, a framework of online electrical fault diagnosis and low-cost state estimation for the lithium-ion battery pack is proposed. Firstly, an available capacity based macro-selection method is carried out to select a “representative cell” of the battery pack periodically. Secondly, the correlation coefficient between “representative cell” and non-representative cells is calculated based on an optimal moving window in dual time-scale, then the electrical fault can be compensated based on the correlation coefficient in time. Finally, the Kalman filter framework is adopted for robust closed-loop state estimation for the lithium-ion battery pack, in which the Gaussian process regression is developed for measurement equation and Ampere hour counting is established for state equation, then the low-cost state estimation can be achieved. Experimental tests on battery packs were carried out under several dynamic load conditions considering user habits. The validation results demonstrate the robustness and accuracy of the proposed approach even there exists multiple disturbances.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Lithium-ion batteries (LIBs) are widely used in electric drive systems [1], such as electric vehicles (EVs), electric construction machineries (ECMs), and electric boats. Battery management system (BMS) is designed for state monitoring, control, and fault diagnosis for the LIBs [2]. Hundreds and thousands of LIBs need to be connected into a battery pack to meet the power requirements before applying to the electric drive systems [3]. Online electric fault diagnosis and state of charge (SOC) estimation are curial tasks, which can ensure the safety and reliability of the electric drive systems.
At present, the SOC estimation for LIBs are mainly including the open-loop estimation method and the closed-loop estimation method [4]. It is well known the robustness of the open-loop estimation is limited, which further limited its industrial application value [5]. For the closed-loop estimation method, multiple filters are applied in the existing researches, including Kalman filters, partial filters, and H∞ filters. The state equation and measurement equation need to be set in the closed-loop estimation method [6]. The most widely used state equation of closed-loop estimation is the Ampere hour counting (AHC) equation. However, the initial SOC errors and measurement noise of the current sensor significantly limited the accuracy of the AHC equation [7], which means a measurement equation with high robustness on initial SOC errors, and measurement noise is needed for accurate SOC estimation. Due to the time-consuming experimental test for model-based measurement equations, the data-based measurement equations attracted much attention [8]. To accurately estimate the SOC of LIB pack, three kinds of the method are introduced: the “big-cell” method, “mean-difference” method, and “representative” method [9]. The “representative” method defines the battery pack as two kinds of cells in the battery, which are “representative” cell and “non-representative” cells, and the “representative” cell is further used for state monitoring for a battery pack.
However, the measurement noises and electric fault which may occur during the operation of electric drive systems are ignored. Meanwhile, most of the researches on BMS separately studied the mentioned two tasks. The electric fault of LIBs may cause abnormal data collection, which will further cause abnormal SOC estimation for a battery pack. Furthermore, the existing researches rarely considered the actual engineering application scenarios, which makes the results based on existing works questionable.
Therefore, we propose a framework of online electric fault diagnosis and state estimation for LIBs packs based electric drive systems in this paper to address the aforementioned limitations. The proposed framework is verified by the experimental dataset considering the actual engineering application scenarios.
2 Workflow of Proposed Method
The workflow of proposed approach is shown in Fig. 1. The first stage is the dataset preparation. The power data of a real loader under V-shape working condition was collected in the real world, and the wavelet preprocessed power data were applied for the battery pack test. The second step is the electric fault diagnosis of the battery pack. The “representative” cell selection was carried out based on the available capacity of the cells in-pack, and a backup cell was further selected as an alternative to the “representative” cell. The third step is the state modeling of the LIB pack. A neural network combined with the moving window is adopted for the open-loop estimation, and the closed-loop estimation was further achieved based on the Kalman filter. Then, the evaluation of the proposed method was carried out considering the real working conditions. Finally, the discussion of the deployment was introduced.

Overall framework of the proposed method.
3 Data Preparation
The datasets of the charging-to-discharging of the LIB pack are shown in Fig. 2. A four cells series battery pack is employed for the experimental test. All cells in-pack are the same kind of battery, which is produced by the Panasonic with a normal capacity of 3 Ah.

Validation dataset of the designed battery pack: a Voltage curves of the cells in-pack; b Current curves of the cells in-pack; c Partial enlarged detail of the voltage curves; d Partial enlarged detail of the current curves.
The electric system of the loader is more complicated than a normal electric vehicle. As shown in Fig. 2 (c, d), the current pulses of the electric loader are at millisecond scale, which means that the AHC method cannot be directly applied in the electric loader due to the limitation of sample frequency. The two stage discharging test is employed to simulate the user habits. Moreover, the thermal chamber is set to change the temperature between 10 and 40 ℃ every twenty minutes to simulate the real temperature variation. Note that the collected datasets are available upon reasonable request.
4 Theory of Proposed Method
The Pearson correlation coefficient is employed for online electric fault diagnosis for the designed battery due to its low-cost calculation and effective results. To realize the online calculation, the moving window is adopted to store the sequence data into numerous segments. The calculation of the original Pearson correlation coefficient is based on the formula below:
In which, the \(\overline{X }=\frac{1}{n}\sum_{i=1}^{n}{X}_{i}\), and the \(\overline{Y }=\frac{1}{n}\sum_{i=1}^{n}{Y}_{i}\). The (\({X}_{i}, {Y}_{i}\)) is the sample from sequences (\(\overline{X }, \overline{Y }\)).
Based on the formula mentioned above, we can calculate the correlation coefficient between the LIB by combining the moving window:
where the \(wl\) represents the window length, the \(\sum_{i=1}^{wl}{V}_{1i}\) represents the data of cell 1 in one moving window, and the \(\sum_{i=1}^{wl}{V}_{2i}\) represents the data of cell 2 in the corresponding moving window of cell 1. Then the correlation coefficient of \({\rho }_{t}\) at \(t\) time can be calculated.

Whole framework of Kalman filter based closed-loop state estimation for LIB.
The Gaussian process regression (GPR) is employed for the open-loop estimation model in this paper. Based on the GP process, the GPR model shows superior performance when measurement noise exists in the input data [10]. Due to the limitation of the conference paper, the theory of GPR will be presented in the complete article later.
To further improve the robustness of the state monitoring for the battery pack, a Kalman filter based closed-loop estimation is introduced, in which the GPR is employed as the measurement equation, and the AHC method is adopted as the state equation. The whole framework of the closed-loop estimation is shown in Fig. 3. The gain of the Kalman filter can effectively compensate the measurement noise caused state estimation error. The detailed procedure of the employed Kalman filter can be found in our previous researches.
5 Experimental Validations and Discussion
The experimental validation results in this paper are all based on a PC equipped with an Intel core-i7 9700 CPU and MATLAB 2021a.

Electric fault diagnosis results and the error compensation: a Voltage data with measurement noise in all cells and stagnation in cell 2&3; b Correlation coefficient results of cell 2&4 in macro-time scale and cell 3 in micro-time scale; c Error compensatory for cell 3; and d Current data with measurement noise.
There are four kinds of electric fault may occur in LIB pack, which are internal short fault, external short fault, connection fault, and sensors fault. Among them, neither the external short fault nor connection fault can make a complete electric circuit, and the internal short fault may occur in a long-time scale which shows little difference per unit time. Therefore, the \({V}_{1i}\) and \(\overline{V }\) will be the same value when stagnation occurs, which makes the Pearson function cannot output results. Then, we can make an accurate fault diagnosis without any unreliable threshold. The correlation coefficient results of cells 2&4 in the macro-time scale and cell 3 in the micro-time scale are shown in Fig. 4 (b). As shown in Fig. 4 (b), the results of cell 3 in the micro-time scale show great fluctuation due to the complex working conditions of the electric loader, which makes the choice of a reliable threshold difficult. In contrast, the results of cells 2&4 in the macro-time scale are smoother than that of cell 3. Then, the sensor's fault can be compensated based on the data of the cell which shows the best consistency with the fault cell in the battery pack.

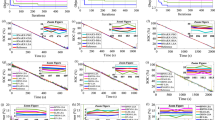
State estimation results of the designed battery pack based on “representative” cell: a GPR based SOC estimation; b Closed-loop based SOC estimation; c GPR based state estimation error; and d Closed-loop based state estimation error.
As the measurement noise is difficult to avoid in practical engineering application, it must be compensated based on a robust state estimation model. The state estimation results of the proposed method after sensor fault compensation is shown in Fig. 5. It can be seen that the robustness of closed-loop based state estimation is much better than that of open-loop based state estimation. As shown in Fig. 5(c, d), the error of GPR based state estimation shows great fluctuation, while the error of closed-loop based state estimation is smoother. The maximum error of the open-loop state estimation is greater than 6%, while the maximum error of the closed-loop state estimation is less than 1.5% after the fluctuation shown at the beginning of discharging.
6 Conclusion
This paper proposes the online electric fault diagnosis method for LIB pack based on the moving window and Pearson correlation coefficient, and further low-cost state estimation is presented based on the “representative” cell method and closed-loop state estimation. The evaluation results show that the suggested electric fault diagnosis method can accurately locate the sensor stagnation without any unreliable threshold, and the closed-loop estimation shows greatly robustness when measurement noises occur in the collected data. The maximum error of less than 1.5% can be obtained after sensor fault compensation. Due to the limitation of the conference paper, further experimental validation on the fault of the “representative” cell will be presented in the final article, and the speed of the proposed fault diagnosis method will be further improved by using an optimized moving window length.
References
Robles, E., Fernandez, M., Andreu, J., Ibarra, E., Ugalde, U.: Advanced power inverter topologies and modulation techniques for common-mode voltage elimination in electric motor drive systems. Renew. Sust. Energ. Rev. 140, 110746 (2021)
Lipu, M.H., et al.: Intelligent algorithms and control strategies for battery management system in electric vehicles: progress, challenges and future outlook. J. Clean. Prod. 292, 126044 (2021)
Tan, X., Lyu, P., Fan, Y., Rao, J., Ouyang, K.: Numerical investigation of the direct liquid cooling of a fast-charging lithium-ion battery pack in hydrofluoroether. Appl. Therm. Eng. 196, 117279 (2021)
How, D.N., Hannan, M.A., Lipu, M.H., Ker, P.J.: State of charge estimation for lithium-ion batteries using model-based and data-driven methods: a review. IEEE Access 7, 136116–136136 (2019)
Hu, C., Ma, L., Guo, S., Guo, G., Han, Z.: Deep learning enabled state-of-charge estimation of LiFePO4 batteries: a systematic validation on state-of-the-art charging protocols. Energy 246, 123404 (2022)
Tian, J., Xiong, R., Shen, W., Lu, J.: State-of-charge estimation of LiFePO4 batteries in electric vehicles: a deep-learning enabled approach. Appl. Energy 291, 116812 (2021)
Mohammadi, F.: Lithium-ion battery state-of-charge estimation based on an improved coulomb-counting algorithm and uncertainty evaluation. J. Energy Storage 48, 104061 (2022)
Ren, X., Liu, S., Yu, X., Dong, X.: A method for state-of-charge estimation of lithium-ion batteries based on PSO-LSTM. Energy 234, 121236 (2021)
Zhou, Z., Duan, B., Kang, Y., Cui, N., Shang, Y., Zhang, C.: A low-complexity state of charge estimation method for series-connected lithium-ion battery pack used in electric vehicles. J. Power Sources 441, 226972 (2019)
Deng, Z., Hu, X., Lin, X., Che, Y., Xu, L., Guo, W.: Data-driven state of charge estimation for lithium-ion battery packs based on Gaussian process regression. Energy 205, 118000 (2020)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 Beijing Paike Culture Commu. Co., Ltd.
About this paper

Cite this paper
Wang, Q., Ye, M., Wei, M., Lian, G., Li, Y. (2023). Online Electrical Fault Diagnosis and Low-Cost State Estimation for Lithium-Ion Battery Pack Based Electric Drive System. In: Sun, F., Yang, Q., Dahlquist, E., Xiong, R. (eds) The Proceedings of the 5th International Conference on Energy Storage and Intelligent Vehicles (ICEIV 2022). ICEIV 2022. Lecture Notes in Electrical Engineering, vol 1016. Springer, Singapore. https://doi.org/10.1007/978-981-99-1027-4_7
Download citation
DOI: https://doi.org/10.1007/978-981-99-1027-4_7
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-1026-7
Online ISBN: 978-981-99-1027-4
eBook Packages: EngineeringEngineering (R0)