
Abstract
Bilateral operation systems have been widely used in daily life and many filed. Generally, both master manipulators and slave manipulators are assumed to be passive devices. However, master manipulators may always bring part active power in the integral network due to the active haptic device. In this paper, we study the bilateral system with part active power, analyze the stability condition is analyzed and a PD bilateral controller is proposed on the basis of four channel two-wave network. Numerical simulations are performed and results prove that the proposed method is better than the conventional method.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Tele-operation systems are widely applied to many hard-to-reach environments, such as aerospace [1], medical surgery [2], deep-sea exploration [3] and so on. Especially, in the medical surgery tele-operation system, at the console, the surgeon commands the master surgical manipulator to perform surgery on the patient. In teleoperation systems, the human operates the master manipulator, and the slave manipulator may follow the trajectory of the master side. Normally, there is a communication channel between the master side and the slave side since they are located in different sites.
In the bilateral teleoperation system, the time delay may be occurred owing to the communication channel between the master and the remote slave side. Many researchers devote themselves to various control methods in order to realize trajectory tracking as well as to enhance the accurate force feedback of the slave side. Some researchers studied the stability of the force feedback bilateral teleoperation system are analyzed from the direction of Lyapunov-Krasovskii theory and hybrid system theory [4,5,6,7]. Others use the four-channel structure to carry out bilateral coordinated control of the teleoperation system [8, 9]. However, in most exist work, the integral network of teleoperation systems are assumed to be passive. The part active power may be produced due to the development and the introduce of more soft master manipulators and devices.
Ensuring the stability of bilateral teleoperation systems with part active power, we design a control structure based on the four-channel wave variables under the condition under constant time delay. The advantage of the four-channel is the clear structure and the parameters are relatively transparent. At the same time, the wave variable algorithm may ensure the stability of the system under different time delays. In the view of the network energy, the stability condition is discussed and a PD bilateral controller is applied, so as to achieve high tracking performances. The rest of paper is organized as follows. The bilateral teleoperation system with part active power is introduced in Sect. 2. The stability is detailed analyzed and the stability condition is discussed in Sect. 3. The PD bilateral controller and numerical simulations are explained in Sect. 4. Conclusions are drawn in the conclusion part.
2 Bilateral Teleoperation System with Part Active Power
The passive theory is similar to Lyapunov theory, both of which analyzes the stability of the system from the perspective of the energy. Many physical systems in reality, such as electromechanical systems, have the nature of passive theory. The basic idea of the passive theory is that if a physical system consumes energy, then this system is passive. Thus, it can be obtained that the system is stable.
For a certain physical system, as shown in Fig. 1, the input vector and output vector are defined as x and y respectively, then the input power Pin of the system is:

Single port physical system.
For the physical system shown in Fig. 1, the input power is equal to the sum of the system power consumption \({P}_{diss}\) and the change of the system energy storage \({E}_{store}\),
(2) indicates that the power input to the system may be consumed or stored by the system. Integrating (2) from any initial time t0 to a certain time t, the energy change relationship can be obtained as follows:
If (3) always satisfies following relation,
Then the system can be determined to be passive, which can further conclude that the system is stable.
Figure 1 displays a single-port network, while our current teleoperation system is generally simplified into a two-port network analysis as shown in Fig. 2.

Two-port physical system
The input power \({P}_{in}\) of the two-port physical system shown in Fig. 2 can be expressed as follows,
Assuming that the initial energy storage of the two-port network is 0, from any time t0 to the current time t, if (6) is satisfied, the two-port network is considered passive.
Currently, the majority of bilateral teleoperation systems addressed in existed litteratures are recommended for the passive input of master terminal. However, we discover through theoretical derivation that adds certain part active components to the input of main terminal which may still achieve system stability control and position tracking. The integral network may be regarded as the combination of an active part and passive part. Our work is focused on arrange the limitation of the active part so that the overall system can be still stable and energy dissipative. In this case, the stability of the integral system, and the relationship between input and output power may be examined from an energy standpoint to determine and discussed.
3 Stability Analysis of Part Active Four Channel Network
3.1 Network Power
The entire working network can be simplified into a two-port network, as illustrated in Fig. 3.

Network power
Figure 3 shows the power flow into the part active network and the power flow is given as follow,
In formula (7), \({f}_{1}\), \( {V}_{1}\) represents the force input and speed input information of the left port, and \({f}_{2}\), \({V}_{2}\) represents the force input and speed input information of the right port. \({P}_{diss}^{L}\) and \({P}_{diss}^{R}\) represents the power dissipation of the left and right ports. From Eq. (7), we can extend it appropriately, because the framework of the entire system is based on the four-channel structure and wave variable algorithm, so b represents the wave impedance, and the following equation can also be obtained:
Making the difference between (8) and (9) to get the power consumed by the entire network \(\mathrm{\Delta P}\), we may get
3.2 The Asymmetric Delay of Vm, Fs
Since the entire communication channel has time delay, considering following asymmetric delay characteristics of \({V}_{m}\) and \({F}_{s}\), we can get:
\({T}_{b}\) and \({T}_{f}\) in (11) are respectively the time delays of the communication channel, \(\uptau \) is input torque, and D is a function about time t. From (11), it can be seen that the system energy E(t) and the dissipation power \({P}_{diss}\) have following relations,
3.3 Analysis of the Stability Condition of Part Active Network
The energy of the entire system can be derived from the following (14):
It can be easily seen that if E(t) in (12) contains a square term, then E(t) ≥ 0. To make the entire system satisfy the passive condition, the following relation must be established \({E}_{flow}(t)\)≥0. Therefore, we deduced following conditions that \(D(\tau )\) and \({\int }_{0}^{t}D(\tau )d\tau \) must be satisfied,
-
(1)
D(t) = f(t).
-
(2)
D(t) can be differential, and \(\exists \frac{\mathrm{dD}(\mathrm{t})}{\mathrm{dt}},\left|\frac{\mathrm{dD}(\mathrm{t})}{\mathrm{dt}}\right|\le \mathrm{D},\frac{{\mathrm{d}}^{2}\mathrm{D}(\mathrm{t})}{{\mathrm{dt}}^{2}}\ge 0\).
-
(3)
\({\int }_{0}^{\mathrm{t}}\mathrm{D}(\uptau )\mathrm{d\tau }=\frac{\mathrm{D}}{2}{\mathrm{t}}^{2}\ge 0\).
According to above three conditions (1) (2) (3), we can use the way of squeeze for the \({\int }_{0}^{t}D(\tau )d\tau \):
Assuming that E(0) = D, the quantitative relationship between the initial energy and the extreme value identity at the adjacent active energy can be derived. Therefore, we can obviously get the inequality of \({E}_{flow}(t)\ge {\int }_{0}^{t}{P}_{diss}(\tau )d\tau \). In this way, the passivity of the entire system can be proven.
4 Numerical Simulations and Results
In the numerical simulation, both master and slave manipulators are used same two-degree-of-freedom manipulators as shown in Fig. 4. The dynamics model, inertia, Coriolis and Centrifugal, Jacobian matrices in the dynamic function are written as follows. Both of the master and the slave side take PID motion controls.

Model of two-degree-of-freedom manipulators of both master and slave side.
The parameters are applied the same as in [3]. The two links lengths of the manipulators are l1 and l2, and the masses of manipulators are m1 and m2 respectively. Let the rotation angle of the connecting joint at a certain time be \({\theta }_{1}, {\theta }_{2}\). The angular velocity of its rotations are the differential of the rotation angle, which is \(\dot{\theta }_1 ,\dot{\theta }_2\). q is the joint angle, which can be represented by a matrix containing the angle parameter of \({\theta }_{1}, {\theta }_{2}\), which is expressed as \(q={\left(\begin{array}{cc}{\theta }_{1}& {\theta }_{2}\end{array}\right)}^{T}\).\(\tau \) is the torque on each joint, and it can express as \(\tau ={\left(\begin{array}{cc}{\tau }_{1}& {\tau }_{2}\end{array}\right)}^{T}\). \({F}_{h}\) is the force exerted by the operator on the main manipulator, while \({F}_{e}\) is the force of the salve manipulator and the operating environment.
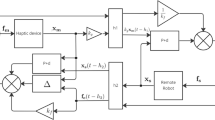
The four channel network diagram of the entire system is showed in Fig. 5. First, we input a step wave and pulse wave in the x and y directions of the master and the slave sides. The position tracking is displayed in Fig. 6. The first joint's torque of the master side is represented by a yellow solid line, and the second joint torque is represented by a purple solid line. From the results, it can be seen that the control effect of the entire system has high efficiency. Meanwhile, the tracking performance is relatively excellent. The force signal tracking is illustrated in Fig. 7. The force of the master terminal is represented by blue and red curves, and the force of the slave terminal is marked with yellow and purple curves. From the results, it can be seen that the transparency and feedback of the force control effect in the entire system are all pretty superior.

The diagram of part active teleoperation system.

Position tracking of joints of master and slave manipulators.

Force tracking of joints of master and slave manipulators.
5 Conclusion
This paper firstly introduces a new four-channel double-wave variable control structure based on part active network. The purpose is to ensure the synchronous tracking of the force of the manipulator without losing the stability of the motion. From the theoretical point of view, we analyze and discuss the stability of the network from the perspective of network energy. Then, a PD bilateral controller is designed. Numerical simulation results show that the proposed method under the constant time delay condition has comparatively brilliant position tracking and force tracking performances between the master and slave manipulators.
References
Cheng, R., Liu, Z., Ma, Z., Huang, P.: Approach and maneuver for failed spacecraft de-tumbling via space teleoperation robot system. Acta Astronaut. 181, 384–395 (2021)
Liu, C., Guo, J., Poignet, P.: Nonlinear model-mediated teleoperation for surgical applications under time variant communication delay. In: SyRoCo (2018)
Wang, T., Li, Y., Zhang, J., Zhang, Y.: A novel bilateral impedance controls for underwater tele-operation systems. Appl. Soft Comput. 91, 106194 (2020)
Estrada, E., Yu, W., Li, X.: Stable bilateral teleoperation with phase transition and haptic feedback. J. Franklin Inst. 358, 1940–1956 (2021)
Kostyukova, O., Vista, F.P., Chong, K.: Design of feedforward and feedback position control for passive bilateral teleoperation with delays. ISA Trans. 85, 200–213 (2019)
Higashino, A., Yamashita, Y., Kobayashi, K.: Control of bilateral teleoperation system consisting of heterogeneous manipulators with communication delay. IFAC-PapersOnLine 52(16), 747–752 (2019)
Mohammadi, K., Talebi, H.A., Zareinejad, M.: A novel position and force coordination approach in four channel nonlinear teleoperation. Comput. Electr. Eng. 56, 688–699 (2016)
Hashemzadeh, F., Tavakoli, M., et al.: Robotica 33, 1003–1016 (2014)
Li, L., Yang, H., Liu, J.: Bilateral coordination control of flexible maste’ slave manipulators using a partial differential equation model. J. Vib. Control 27, 1561–1572 (2020)
Lu, H., Zhang, M., Xu, X.: Deep fuzzy hashing network for efficient image retrieval. IEEE Trans. Fuzzy Syst. (2020). https://doi.org/10.1109/TFUZZ.2020.2984991
Lu, H., Li, Y., Chen, M., et al.: Brain Intelligence: go beyond artificial intelligence. Mobile Netw. Appl. 23, 368–375 (2018)
Lu, H., Li, Y., Mu, S., et al.: Motor anomaly detection for unmanned aerial vehicles using reinforcement learning. IEEE Internet Things J. 5(4), 2315–2322 (2018)
Lu, H., Qin, M., Zhang, F., et al.: RSCNN A CNN-based method to enhance low-light remote-sensing images. Remote Sens. 13, 62 (2020)
Lu, H., Zhang, Y., Li, Y., et al.: User-oriented virtual mobile network resource management for vehicle communications. IEEE Trans. Intell. Transp. Syst. 22(6), 3521–3532 (2021)
Acknowledgements
This work was supported by the National Natural Science Foundation of China [grant numbers No. 61906086], Natural Science Foundation of Jiangsu Province of China [No. BK20210930].
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Zheng, D., Pu, Y., Bai, J. (2022). Analysis and Control for Bilateral Teleoperation Systems with Part Active Power. In: Yang, S., Lu, H. (eds) Artificial Intelligence and Robotics. ISAIR 2022. Communications in Computer and Information Science, vol 1700. Springer, Singapore. https://doi.org/10.1007/978-981-19-7946-0_7
Download citation
DOI: https://doi.org/10.1007/978-981-19-7946-0_7
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-7945-3
Online ISBN: 978-981-19-7946-0
eBook Packages: Computer ScienceComputer Science (R0)