
Abstract
Finite-element software was used to conduct a simulated analysis of hard ground, soft soil, and water impacts for the composite tensor-skin fuselage box structure of helicopters; to study the energy absorption of the tensor skin in hard ground, soft soil, and water impacts; and to compare the accelerated velocity of the tensor-skin fuselage box structure under these impact conditions to establish whether the acceleration peak of the water impact is smaller than that of the hard ground and soft soil impacts. For the water impact, the well-designed tensor skin absorbs energy by stretching the fold area, so the tensor skin provides a greater advantage over a traditional skin in improving safety in helicopter impact. It is important to ensure that all wrinkles are spread successfully in the design of the tensor skin. A tensor ply spread is important for the tensor skin to absorb energy and to maintain structural integrity. The tensor skin offers greater safety advantages over traditional skins in helicopter crashes at the water surface.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Helicopters are highly mobile aircraft that are becoming increasingly popular, but, helicopter flight accidents threaten the lives of occupants. Anti-crash design is an important consideration for military or civilian helicopters. Only the impact of firm ground is taken into account in current anti-crash design despite accident statistics showing that more than 80% of military and civilian helicopter crash accidents occur in soft soil and at water surfaces [1, 2]. When a helicopter crashes into firm ground, the impact kinetic energy is often absorbed by devices such as the landing gear, fuselage and seats. The combined effect of these energy-absorbing devices reduces the impact energy that is delivered to occupants. However, when a helicopter collides with a water surface, a huge lateral pressure load is experienced after the landing gear enters the water and the fuselage impacts onto the water surface. In this case, the metal skin undergoes a large plastic deformation, and the composite laminate fails because of the large lateral load, which results in the failure of load transmission to other energy-absorbing devices beneath the floor. Most impact energy is absorbed by the seats, which reduces the chances of survival of the occupants [3]. According to statistics, 10% of civilian and 33% of military helicopter accidents are water-surface impacts with low occupant survival rates [4, 5].
In the early 1990s, Thuis et al. proposed a concept of a “tensor-skin panel”, in which the skin can transfer water impact loads to nearby energy-absorbing structures without breaking. In 1995, Thuis performed a quasi-static test to verify that this structure can transfer a water load [6,7,8,9,10]. In 1998, Michielsen et al. conducted dynamic tests on a composite tensor-skin panel. The water-impact resistance of the tensor-skin panel was much better than that of a traditional honeycomb panel, and it could be used in the impact-sensitive areas of a helicopter sub-floor structure to provide sufficient film strength to transfer a pressure load to an energy-absorbing structure to absorb impact energy [11,12,13]. In 2000, the German Aerospace Center (DLR) carried out a sub-floor dynamic impact test to verify whether the helicopter sub-floor structure that is comprised of a tensor skin and a corrugated beam improves the helicopter crashworthiness [14, 15].
The behavior of hard-ground, soft-soil, and water-surface impacts for the composite tensor-skin fuselage box structure of helicopters were simulated; to study the loading conditions of tensor skin in water-surface impacts; and to analyze the velocity, accelerated velocity, and energy changes of the tensor-skin fuselage box structure in hard-ground, soft-soil, and water-surface impacts to provide a foundation to study subsequent applications of a tensor-skin structure on the composite fuselage structure of helicopters.
2 Structure Style
Composite material differs from metal. Its resin matrix is brittle and allows for almost no plastic deformation. Because reinforced fiber can only withstand a tensile load, parts made of composite materials resist tension well but resist compression poorly. A composite-material structure anti-impact design method is different from a conventional metal material structure. For example, structures that include sine wave beams and hollow column-reinforced beams are used under the floor to improve the structural stability. Foam or honeycomb is used to fill some structures. Some components, such as roll tubes and sandwich beams, which experience controllable compression deformation are used to enhance the structural capacity for impact-energy absorption and dissipation.
We designed a helicopter composite corrugated sub-floor structural component with anti-impact standards, and with energy-absorption characteristics of a composite energy-absorbing structure in mind. The component was contained in a 1240 mm × 940 mm × 300 mm box structure, and was composed of two longitudinal beams, two bulkheads, and upper and lower panels. A beam web plate in corrugated beam form and honeycomb sandwich structure was the main energy-absorbing component. A cross structure was designed at the intersection of the beam and bulkhead. Because the upper and lower panels were not the main energy-absorbing components, the upper panel was aluminum, and the lower panel was glass. The bottom skin structure of the fuselage was tensor skin. The CATIA model and structural components for the composite fuselage box structure are shown in Fig. 1 [10]. According to the research results of the composite corrugated beam structure elements, a ply detailed design of corrugated beams (web thickness, material composition, laying direction, initial triggering position, etc.) was applied to design the sub-floor components.

Composite fuselage box structure of helicopter [10]
2.1 Tensor-Skin Structure
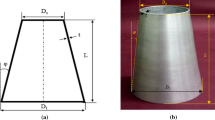
A tensor-skin plate consists of three parts: cover ply, tensor ply, carrying ply. The plate is a sandwich plate that comprises a corrugated cover ply, a hat-shaped inner, and with a structure as shown in Fig. 2a. The tensor ply is made of special high-tensile polyethylene fiber that is injected with epoxy resin. The tensor ply was a new bullet-proof material, S-FDC88, which is a fourth-generation fiber. The inner and outer surface materials were carbon fiber prepreg cloth. Experimental data were obtained from tensile, compressive, and shear tests on these materials [12, 16]. A 620 mm × 500 mm tensor-skin sandwich panel was the focus of this study, with its size and cross-section shown in Fig. 2c.

Tensor-skin structure
2.2 Tensor Ply-Forming Process
For the tensor ply, an appropriate epoxy glue was selected from which to fabricate the new bullet-proof material, S-FDC88, into prepreg cloth for easy laying. A tensor ply was used as the core structure of the tensor skin. The material and structure of ply were unique. Each tensor ply consisted of four plies of new ballistic material, S-FDC88, and three filling sandwich material plies, and the structure forming process was as follows:
(1) The filling sandwich material consisted of three independent honeycombs. The honeycomb, as a buffer zone, could not be bonded with the S-FDC88 skin. According to prior techniques, the three honeycombs were cut according to the size on the drawings, and these were coated with a Teflon material. (2) The four plies prepreg cloth made from S-FDC88 was bound together according to the drawing requirements, and was cut according to the unfolded size of the tensor ply for use. (3) The S-FDC88 material that was cut based on the previous steps was preformed according to the shape of the filling sandwich material, and the sandwich material was coated (Fig. 3).

Digital model for tensor skin forming
The outer edge of the 15-mm-thick pressure releasing honeycombs that exist on both sides of the tensor ply was a 45° chamfer. To increase the pressure resistance of the honeycomb edge, the length direction of the honeycomb should be perpendicular to the grid.
A tooling fabric was added at the honeycomb chamfering. To prevent honeycomb collapse during curing, LTM12 process glass cloth was used at the product honeycomb chamfering to paste the product edge profile (two to three plies under normal circumstances) on the demoulding film after completion of the product laying, with a staggered laying location as shown in Fig. 4.

Pressure-resistance process that is formed at the honeycomb edge
3 Analysis of Fuselage Box Section Impact
3.1 Finite-element Model
Isotropic shell elements were selected for the fuselage, because many theoretical models exist for such elements, such as the Belytschko–Tsai, Hughes–Liu, and Key–Hoff models. Large deformations, rotations, and elastic–plastic strains are allowed, and many failure criteria can be obtained. We used the Belytschko–Tsai shell-element theory by default. The Belytschko–Tsay, Hughes–Liu or Key–Hoff equations were used in the CQUAD4 element. Belytschko–Tsay is the most efficient in the shell equations and should be used in most cases. Key–Hoff is more time-consuming, but it performs better at large strains (>5%). When a portion of the structure is subjected to a large strain, the Key–Hoff shell should be considered for use in that area and the Belytschko–Tsay shell should be used elsewhere. Although more time-consuming than the two methods mentioned above, the Hughes–Liu shell displays advantages only when the element thickness is varied [17].
3.1.1 Fuselage Model
A finite-element model was established based on the composite corrugated beam sub-floor structure. The nonlinear transient dynamic program, MSC.Dytran, was used for the simulated analysis of a rigid surface impact, with the finite-element model as shown in Fig. 5. Four-node shell elements were used for the lower tensor skin, upper cover, and corrugated beam. Eight- and six-sided element simulations were used for the middle horizontal honeycomb, and a certain number of mass elements was set on the upper Cover’s corrugated beam to simulate the mass of the occupant, seat, equipment, and structure above floor. The total element and sub-floor structure mass was 1031 kg. By considering the structure symmetry, half of the test article was used for finite-element analysis. The finite-element model consisted of 39872 nodes, 34940 four-node shell elements, and 4932 eight-node body elements. The contact relationship between a composite corrugated Beam’s sub-floor structure and the rigid surface was simulated by a planar rigid wall. A DMATEP material model of the composite material corrugated beam was used, and the material property was of equivalent metal performance. The falling velocity complied with the anti-impact design and verification requirements of the Military Helicopter Crash-Resistance Requirements (GJB 268l-96) on the military helicopters. The design impact velocity variable quantity along the vertical direction was 7.9 m/s.
To prevent cover ply, tensor ply and carrying ply of the tensor skin from penetrating each other, a self-contact was set to the tensor-skin plate. To enable the transfer of a water-impact load between the support and the tensor ply of the tensor skin, a breakable contact setpoint was required. A self-contact was established between the corrugated beam and the lower skin to prevent the corrugated-beam penetration into the lower skin and failure to reach a predetermined effect.
3.1.2 Soil and Water Models
Because the soil mechanical properties are affected by parameters such as the Soil’s composition, humidity, and depth, loose sandy soil was selected as an object of study in this paper. Because loose sandy soil has a smaller shear strength and no obvious rebound phenomenon in a drop test, a FOAM2 material model as provided by the simulation analysis program was selected. The model was used for isotropic compressible materials with a Poisson’s ratio of almost zero. The unloading process followed a user-defined, nonlinear hysteresis-response stress–strain curve. The yield stress was defined to have a strain-rate dependence.
The Euler method was used to describe fluid flow and sputtering. The interaction between a liquid and a solid structure was simulated in combination with a general fluid–solid coupling method. A Eulerian element served as a fixed-reference system, and material could flow in a Eulerian element. During the analysis, the material mass, momentum, and energy could be transferred among Eulerian elements. Because the Euler method simulates material movement in Eulerian elements with a constant volume, the shape of the Eulerian element does not change with the material deformation at any time. Therefore, no elemental distortion occurs, and the model is suitable for simulating a fluid material that is prone to large deformation.
Water waves can rise above the water surface. To simulate the effect of splashing water, an air area was established above the water, with the length, width, and depth of the Euler air volume being 30, 30, and 3 fluid elements, respectively (total of 2700 elements). For the Euler water volume, the length, width, and depth were 30, 30, and 18 fluid elements, respectively (total of 16200 elements). The finite-element model is shown in Fig. 5c.

Finite-element model
3.2 Material Properties
-
(1)
Properties of corrugated beam material: density: 1.66 × 10−9 t/mm3, elastic modulus: 14600 MPa, Poisson ratio: 0.229, yield strength: 180 MPa, maximum plastic strain: 0.1.
-
(2)
Properties of honeycomb material: density: 4.8 × 10−11 t/mm3, elastic modulus: 100 MPa, Poisson’s ratio: 0.3, yield strength: 10 MPa, maximum plastic strain: 0.5.
-
(3)
Properties of loaded material: density: 3.36 × 10−6 t/mm3, elastic modulus: 71000 MPa, Poisson ratio: 0.3, yield strength: 325 MPa, and maximum plastic strain: 0.5.
-
(4)
Material of upper cover: density: 2.77 × 10−9 t/mm3, elastic modulus: 2 × 105 MPa, Poisson ratio: 0.3, yield strength: 600 MPa, and maximum plastic strain: 0.5.
-
(5)
Materials of cover ply and carrying ply of tensor-skin plate: density: 1.37 × 10−9 t/mm3, elastic modulus: 30300 MPa, Poisson ratio: 0.32, yield strength: 345 MPa, and maximum plastic strain: 0.02.
-
(6)
Material of tensor-skin Plate’s tensor ply: density: 1.4 × 10−10t/mm3, elastic modulus: 31000 MPa, Poisson ratio: 0.32, yield strength: 425 MPa, and maximum plastic strain: 0.3.
-
(7)
Water properties: density: 1000 kg/m3 = 1 × 10−9 t/mm3, and bulk modulus: K = α1 = 2.2 × 109 N/m2 (Pa) = 2.2 × 103 MPa.
-
(8)
Model parameters of soil material: density of 7.16947 × 10−11 t/mm3, bulk modulus of 3.675 MPa, termination stress of −6.895 × 10−2 MPa, and energy dissipation factor of 0.99 [18, 19].
3.3 Simulation Results
Figure 6 shows the deformation of the box structure after hitting firm ground, soft soil, and the water surface. Figures 6a, b show that when the tensor-skin fuselage box structure impacts on firm ground and soft soil, the impact force acts a point instead of as a surface force. This behavior occurs because the firm ground and soft soil are not as pervasively as the water, and the tensor skin is less effective in energy absorption. The tensor skin does not function when it impacts on firm ground and soft soil. Figure 6c shows that the fuselage section and tensor skin suffer from significant deformation under the effect of water impact. The tensor skin is spread to a certain extent, but the tensor ply is not spread completely because of structural design factors, and therefore it only reflects some advantages of the tensor skin water-surface impact. Figure 7 shows the underwater deformation of the carrying ply, tensor ply and cover ply of the tensor skin. Under water impact, the cover ply is firstly damaged, and the fold parts of the tensor ply open to transfer load to the corrugated beam for energy absorption.

Deformation of composite tensor-skin fuselage structure during the impact

Deformation of tensor-skin plies

Comparison of results from firm-ground, soft-soil, and water-surface impacts
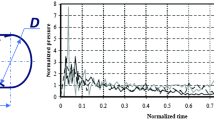
Figure 8a shows the contact force–displacement curve of the tensor-skin fuselage box structure in a soft-soil impact [2]. The trends are similar, which indicates that this analysis method is feasible. Figure 8b shows the accelerated velocity curve for the firm-ground, soft-soil, and water-surface impacts. The accelerated velocity peak for the water-surface impact is less than that for the soft-soil impact, and the accelerated velocity peak for the soft-soil impact is less than that for the firm-ground impact. Figure 8c shows the comparative changing curve of the deformation energy for parts of the fuselage box structure. The tensor skin absorbs a part of the energy, and most of the energy is transferred to the energy absorption structure of the surrounding corrugated beam through the deformation of tensor skin. Thus, the tensor skin exhibits greater safety advantages over traditional skin for a water-surface helicopter impact.
4 Conclusions
The accelerated velocity peak for the water-surface impact is less than that for the firm-ground and soft-soil impacts.
A well-designed tensor skin can spread to absorb energy in a water-surface impact. This tensor skin cannot spread for soft-soil and firm-ground impacts, and so does not work, and the resultant effect is similar to that of pressure on a traditional sandwich structure.
According to the above analysis, the tensor skin is a special composite laminated plate structure, and its deformation mode can be flattened or fractured such as that of an ordinary laminated plate structure. If the structural design is reasonable, in a water crash, the tensor skin can achieve surface fractures and the tensor ply in the middle spreads under the action of hydraulic pressure. During the spread of a tensor ply, the large plastic deformation can absorb impact energy. In addition, because of the large deformation capacity of the tensor ply, the structural integrity can be maintained to prevent water from impacting other structures directly. However, whether the energy absorption of the tensor ply is effective is related to the structural design and stiffness, namely, we need to take into account issues that include the fuselage stiffness, floor stiffness, and tensor skin matching in the actual design process.
References
Bolukbasi, A.O.: Development of analysis methodology for crash impacts on soft soil. In: Presented at the 54th Annual Forum of the American Helicopter Society (1998)
Wiggenraad Ma Ma, J.F.M.: Numerical investigation of a crash test of a composite helicopter sub_floor structure. Compos. Struct. 51(2001), 345–349 (2001)
Michielsen, A.L.P.J, W, J.F.M., Ubels, L.C., Frijns, R.H.W.M, Kohlgrüber, D., Labeas, G., Mccarthy, M.A.: Design, Test and Analysis of Tensor Skin Panels for Improved Crashworthiness in Case of Water Impact. National Aerospace Laboratory NLR (1998)
Wittlin, G., Smith, M., Sareen, A., Richard, M.: Airframe water impact analysis using a combined MSC/DYTRAN—DRI/KRASH approach. In: Proceedings of the AHS Forum 53, Virginia Beach (1997)
Brite-Euram project CAST: Crashworthiness of Helicopter on Water: Design of Structures Using Advanced Simulation Tools. G4RD-CT2000-00178 (2000)
Brite-Euram project CAST: Crashworthiness of Helicopter on Water: Design of Structures using Advanced Simulation Tools, G4RD-CT-2000-0178 (2003)
Brite-Euram project CRASURV: Commercial Aircraft—Design for Crash Survivability. CT96-0207 (1999)
Brite-Euram project CRAHVI: Crashworthiness of Aircraft for High Velocity Impact. G4RD-CT2000-00395 (2004)
Thuis, H.G.S.J., Wiggenraad, J.F.M.: A tensor-skin concept for crashworthiness of helicopters in case of water impact. NLR TP 94045 L (1994)
Labeas, G., Kermanidis, T.H.: Crushing behavior of the energy absorbing 'tensor skin' panels. Labor. Technol. Strength Mater. (2002)
Ubels, L.C., Wiggenraad, J.F.M.: Increasing the survivability of helicopter accidents over water'. LR-TP-2002-110, February (2002)
Ubels, L.C.: CRASURV – D.4.1.2, Behaviour of shear panels. NLR TR 97534 L (1997)
Kohlgrüber, D., Weissinger, H.: CRASURV–D.4.1.3, Results of dynamic tests of tensor skin panels. DLR-IB 435-97/31 (1997)
Lestari, W., Thuis, H.G.S.J., Wiggenraad, J.F.M.: Development of a trigger mechanism to reduce peak forces in crash loaded composite sine-wave spars'. NLR TP 94319 L (1994)
Wiggenraad, J.F.M., Michielsen, A.L.P.J., Santoro (Alenia), D., Lepage, F. (CEAT), Kindervater, C. (DLR), Beltran, F. (Principa).: Development of a crashworthy composite fuselage structure for a computer aircraft. NLR TP 99532 L (1999)
Kohlgrueber, D., Weissinger, H.D.: 4. 1. 3. Results of Dynamic Tests of `Tensor Skin' Panels. DLR-IB 435±97/31 (1997)
Vigliott, A, Pentecote, N., Clifford, S.: Crashworthiness of Rotorcraft on Water, An Experimental Test Campaign: Bristol. UK: 28th European Rotorcraft Forum (2002)
Sareen, A.K., Fasanella, E., Sparks, C. etc.: Comparison of Hard Surface and Soft Soil Impact Performance of a Crashworthy Composite Fuselage Concept. UK: 28th European Rotorcraft Forum (2002)
Naghipour, P., Aktay, L., Johnson, A.: Numerical investigation of structural crash response of thin-walled structures on soft soil. Mater. Design 29, 2052–2060 (2008)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 Chinese Aeronautical Society
About this paper

Cite this paper
Han, L., Qi, H., Li, S., Men, K., Wang, J. (2023). Impact Energy Absorption Features for Tensor-Skin Fuselage Box Structure. In: Chinese Society of Aeronautics and Astronautics (eds) Proceedings of the 10th Chinese Society of Aeronautics and Astronautics Youth Forum. CASTYSF 2022. Lecture Notes in Electrical Engineering, vol 972. Springer, Singapore. https://doi.org/10.1007/978-981-19-7652-0_22
Download citation
DOI: https://doi.org/10.1007/978-981-19-7652-0_22
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-7651-3
Online ISBN: 978-981-19-7652-0
eBook Packages: EngineeringEngineering (R0)