
Abstract
This paper developments approach for stable analysis in flight of large flexible aircraft. Considering geometrical nonlinearity, aircraft is divided into nonlinear wing components and linear fuselage component. Structural ROM method is used for wing structure modeling and nonlinear substructure method is used for comprehensive assembling wing ROM and fuselage linear modes together to obtain integrated aircraft dynamic equations. Non-planar double lattice method (DLM) is used as aerodynamic model. Stability analysis is based on the linearization around the trim configuration. The numerical results for a flexible flying wing aircraft model indicate coupling effects between rigid-body motions and elastic modes are important for this type of aircraft.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
As the representative of the very flexible airplane, high-altitude long-endurance (HALE) aircrafts usually attract extensive attention. Because of its weight and large flexibility, geometric nonlinearities become very important and affects aeroelastic stability characteristics and dynamic responses. With the analysis requirements of HALE, Hodges, Cesnik and Patil proposed the concept of geometric nonlinear aeroelastic problem in 1999 [1, 2]. Lots of research considering geometric nonlinearities in aeroelastic analysis has been carried out [3,4,5,6]. For large flexible aircraft, especially flying wing aircraft, the frequency differences between elastic modes and rigid-body motions tend to be sufficiently small such that the coupled effect cannot be ignored [7]. Furthermore, the structure becomes nonlinear due to the large deformation. Nonlinear aeroelasticity and flight dynamics should be considered simultaneously [8]. Besides, aircrafts with flying-wing configuration which have relatively low fuselage pitch inertias and relative low elastic mode frequencies show difference in dynamic instability compared to traditional aircrafts, which is known as body-freedom flutter (BFF) [9].
Structural reduced order model (ROM) is an efficient method to analysis nonlinear response problem of large flexible structure. It shows us computational efficiency advantages of structure analysis especially in nonlinear aeroelastic issue and offers the potential for real-time domain analysis. Muravyov et al. developed an algebraic polynomial expression to characterize the structural nonlinear dynamic behavior [10]. Besides, Mignolet et al. showed that the nonlinear stiffness of large flexible structure can be described using an equation with the quadratic and cubic terms of the basis modes [11]. Based on that formulation, McEwan et al. presented the Modal/FE (MFE) approach with serial static test cases and regression approaches [12]. Cooper et al. developed the MFE approach in aeroelastic analysis [13]. An et al. modified MFE method to evaluate the accuracy of analysis and applied the method into static trim and nonlinear gust response problem [14, 15].
For more complex aircraft structures, such as the entire aircraft system, decomposing it into several simple substructure and using the boundary conditions between the substructures to assemble dynamic equations could be an efficient method for structure modeling. In practical applications, the component mode synthesis (CMS) method including the fixed interface CMS and the free interface CMS is widely used.
Applications of CMS in local nonlinear dynamic problem have attracted attention of many scholars. Clough et al. investigated substructure method to local nonlinear problem first [16]. Tan et al. divided the structure into linear substructure components and nonlinear substructure components [17]. The interactions between substructures were replaced by boundary forces to solve the transient response problem of local nonlinear structures. Fey et al. reduced the cantilever structure with nonlinear support and studied the nonlinear frequency domain response problem [18].
Most nonlinear substructures method focuses on the connection nonlinearities. As long as the nonlinear interface connection relationship is given, substructure itself is still a linear structure. The major source of geometric nonlinearities for large flexible aircraft is the wing component. The fuselage and other components of aircraft maintain linearity in analysis of geometric nonlinear problems. Characterizing the whole aircraft structures with nonlinearity will decrease the computational efficiency severally. The CMS method considering geometric nonlinearities in structure domain should be developed. Karpel et al. added virtual mass elements to the subcomponents to characterize the dynamic behaviors of other subcomponents [19]. The approach divides the wing component into segments processing rather than as a whole structure in order to interface with the fuselage, so it is more like a combination of nonlinear CMS and finite segment method. Kantor et al. developed this method and extended it into a simple model [20]. At present, substructure method considering geometric nonlinearities is still immature, and applications in aeroelastic analysis are still in the exploratory stage.
This paper is committed for aeroelastic problem associated with stability including geometric nonlinearities based on structural ROM and nonlinear substructure method. Aircraft is divided into nonlinear wing components and linear fuselage components. Structural ROM is used for wing structure modeling. Non-planar double lattice method (DLM) is used as aerodynamic model. To validate the method introduced, a very flexible flying wing model is taken as numerical model. Stability analysis results with linearization of dynamic equations are provided.
2 Theory
2.1 Structural Reduced Order Model
The structural reduced order model can be obtained with Galerkin method [10]. The structural dynamics equation can be expressed as:
where tensor \(S\) is the second P-K stress tensor, tensor \(F\) representatives the deformation gradient tensor, \(b^{0}\) representatives the force vector and \(\rho_{0}\) representatives the density. \(X\) representatives the position vector and \(x\) representatives the deformed vector. A truncated basis of the linear modes is used and a third polynomial form describes the nonlinear stiffness and the structural dynamics equation can be given in modal form:
where \(M_{ij}\) are the reduced mass matrix, \(F_{i}\) is the modal force, and \(E_{ij}^{(1)} ,E_{ijl}^{(2)}\) and \(E_{ijlp}^{(3)}\) are the reduced stiffness tensor. Einstein summation expression is introduced.
\(M_{ij}\) and \(E_{ij}^{(1)}\) can be expressed in the formulation as:
The formulation of the nonlinear dynamic equations corresponding to the \(i - th\) basis function can be written as:
The structure dynamic equations in modal space have been obtained and generalized coordinates \(q_{i}\) namely.
Two orthogonal spanwise modes are taken into the structural reduced order model to characterize the foreshortening effects of the large flexible structure. A combination of truncated linear modes and orthogonal spanwise modes is generated as a basis function in the nonlinear structural ROM.
Regression analysis is introduced to obtain the nonlinear stiffness coefficients \(E_{ijl}^{(2)}\) and \(E_{ijlp}^{(3)}\), the static formulation of Eq. (5) is:
Evidently, if there are serials of test loads and structural deformations, nonlinear stiffness can be obtained by regression approach. The serials of test loads and structural deformations can be calculated by a commercial FEM software package.
The accuracy of the nonlinear stiffness coefficients directly depends on the selected test loads. The selection of test loads must emphasize that the aerodynamic force on the wing should be a follower force, which describes the actual characteristics of the aerodynamic force. In this paper, the aerodynamic force under the deformation combined bending and torsion modes is chosen as the test load case. The formulation of the wing deformation, which generates aerodynamic forces, should be:
Here, \(\{ \phi_{i} \}_{bend}\) denote the bending modes and \(\{ \phi_{j} \}_{torsion}\) denote the torsion modes. \(a_{i,j}\) denotes the weight factors.
2.2 Nonlinear Substructure Method
For large flexible aircraft, take wing components as nonlinear components and fuselage component as linear component. Considering substructure \((\alpha = 1, \cdots l_{1} ,l_{2} , \cdots n)\) system, each subcomponents dynamic equation in deformation coordinates can be given as:
Subscript \(i,b\) representative interior and boundary coordinates, \({\mathbf{g}}(u)\) is nonlinear section, \({\mathbf{G}}_{b}\) is the boundary load vector, and \({\mathbf{f}}\) is external force vector. Displacement and Force coordination conditions on interface can be expressed as:
Applied fixed interface CMS method to nonlinear wing components analysis, when give \({\mathbf{u}}_{b}^{(nl)} = 0\), structure dynamic equation is:
Use linear modes to reduce order with \({\mathbf{u}}_{i}^{(nl)} = {{\varvec{\Phi}}}_{i}^{(nl)} {\mathbf{q}}_{i}^{(nl)}\), low-order equation is:
Equation (12) has the similar formulation with reduced order model in Sect. 2.1. Introduce restrained modes \({{\varvec{\Psi}}}_{b}\) to translate displacement:
The structure dynamic equation can be reformulated as:
where \({\mathbf{M}}_{ib} = {{\varvec{\Phi}}}_{ii}^{T} ({\mathbf{m}}_{ii} {{\varvec{\uppsi}}}_{ib} + {\mathbf{m}}_{jj} )\) \({\mathbf{M}}_{bi} = {\mathbf{M}}_{ib}^{T}\), \({\mathbf{M}}_{bb} = {{\varvec{\uppsi}}}_{ib}^{T} ({\mathbf{m}}_{ii} {{\varvec{\uppsi}}}_{ib} + {\mathbf{m}}_{ij} ) + {\mathbf{m}}_{ji} {{\varvec{\uppsi}}}_{ib} + {\mathbf{m}}_{jj}\), \({\tilde{\mathbf{f}}}_{i} = {{\varvec{\Phi}}}_{ii} {\mathbf{f}}_{i}\), \({\tilde{\mathbf{f}}}_{b} = {{\varvec{\uppsi}}}_{ib} {\mathbf{f}}_{i} + {\mathbf{f}}_{b}\).
Apply linear mode reduction method to fuselage component analysis with main linear modes \({{\varvec{\Phi}}}_{k}\) and residual modes \({{\varvec{\Psi}}}_{d}\). The structural dynamics equation can be reformulated as:
where \({\mathbf{M}}_{dd} = {{\varvec{\Psi}}}_{d}^{T} {\mathbf{m\Psi }}_{d}\), \({\mathbf{K}}_{dd} = {{\varvec{\Psi}}}_{d}^{T} {\mathbf{k\Psi }}_{d}\), \({\tilde{\mathbf{f}}}_{k} = {{\varvec{\Phi}}}_{k}^{T} \left\{ \begin{gathered} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\mathbf{f}}_{i} \hfill \\ {\mathbf{G}}_{b} + {\mathbf{f}}_{b} \hfill \\ \end{gathered} \right\}\), \({\tilde{\mathbf{f}}}_{d} = {{\varvec{\Psi}}}_{d}^{T} \left\{ \begin{gathered} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\mathbf{f}}_{i} \hfill \\ {\mathbf{G}}_{b} + {\mathbf{f}}_{b} \hfill \\ \end{gathered} \right\}\). Considering the specified aircraft formulation, structure can be divided into left wing component, right wing component and fuselage component. Structure dynamic equations can be expressed as:
Subscript \(lw,rw,fu\) represent left wing, right wing and fuselage. Displacement and force coordination conditions are:
where the \({\mathbf{u}}_{bfulw} ,{\mathbf{u}}_{bfurw}\) is connection freedom between fuselage with left wing and right wing.
2.3 Aerodynamics Model
Non-planar DLM can be used to complete stable analysis. Unsteady aerodynamic force is given as:
Structure model and aerodynamic model can be linearized around trim configuration [9] and comprehensive assembled to a state-space model:
where \(x_{ae}\) denotes the state vector and \({\mathbf{A}}_{ae}\) denotes the state matrix. The eigenvalues of state matrix represent the stability of system.
3 Numerical Results
3.1 Flying Wing Model
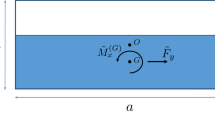
A numerical example of flying wing model is presented here to describe stable characteristics of rigid-elastic coupled problem. Figure 1 shows the aerodynamics model of aircraft with flying wing configuration. Main design parameters have been given in Table 1. This aircraft model has two large-aspect-ratio wings. Two control surfaces are set at the trailing edge of the wing. The FEM model of the flying wing is constructed with CBEAM elements and CONM elements in MSC.NASTRAN. The non-planar DLM are introduced to characterize aerodynamics behavior. For symmetric flight condition, degrees of freedom of x-axis, z-axis and pitch motions and elastic modes are considered. Linearized is complemented based on the nonlinear trim statement with large deformations.

Flying wing
3.2 Numerical Results
Analysis results are obtained under the symmetric flight conditions. In elastic analysis, only elastic modes are involved in dynamic equations and rigid-body motions are not consideration. In the integrated analysis, both elastic modes and rigid-body motions are considered. In linear analysis, there are no nonlinear stiffness terms in structural ROM of wing components. Figure 2 shows the linear flutter analysis results with only elastic modes. The critical flutter speed is 49.0 m/s, and mode 5 participates in flutter. Figure 3 shows the nonlinear flutter analysis results with only elastic modes. The critical flutter speed is 36.5 m/s, which is different form linear analysis results. Nonlinearities affect stability obviously.
Considering rigid body motions, Fig. 4 shows the linear analysis results with rigid-body motion and elastic modes. Two branches of root locus cross the imaginary axis within the calculation range. When the airspeed velocity is 30.0 m/s, the short period mode locus crosses the imaginary axis, and the rigid-elastic coupling becomes unstable. Figure 5 shows the linear analysis results with rigid-body motion and elastic modes. Two branches of root locus cross the imaginary axis within the calculation range. When the airspeed velocity is 25.5 m/s, the short period mode locus crosses the imaginary. Nonlinearities affect stability obviously as well. Compared with elastic flutter analysis results, the critical stability flight speed of the coupled aeroelasticity and flight dynamics system is lower.

Elastic analysis results

Nonlinear elastic analysis results

Linear integrated analysis results

Nonlinear integrated analysis results
4 Conclusions
A practical approach for the stability analysis of the very flexible aircraft is established in this paper. The structural ROM is used for wing components modeling and nonlinear substructure method is used for aircraft system modeling. Non-planar DLM is used for aerodynamics modeling. The state-space equations are obtained, which can deal with rigid-elastic coupling problem.
A very flexible aircraft with flying wing configuration is selected to describe the stability problem. Because of large flexible characteristics and small pitching inertial of such aircraft, the critical stability flight speed is affected obviously by nonlinearities and rigid-motions. The flight dynamics and aeroelastic analysis should be performed simultaneously.
References
Patil, M.J., Hodges, D.H.: On the importance of aerodynamics and structural geometrical nonlinearities in aeroelastic behavior of high-aspect-ratio wings. In: 41st AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference and Exhibit, AIAA, Reston (2000)
Patil, M.J.: Nonlinear Aeroelastic Analysis, Flight Dynamics, and Control of a Complete Aircraft. Georgia Institute of Technology, Atlanta (1999)
Tang, D.M., Dowell, E.H.: Experimental and theoretical study on aeroelastic response of high-aspect-ratio wings. AIAA J. 39(8), 1430–1441 (2001)
Frulla, G., Cestino, E., Marzocca, P.: Critical behavior of slender wing configurations. Proc. I Mech. Eng. Part G: J. Aerosp. Eng. 224(1), 587–600 (2009)
Abbas, L., Chen, Q., Marzocca, P., Milanese, A.: Nonlinear aeroelastic investigations of stores-induced limit cycle oscillations. Proc. I Mech. Eng. Part G: J. Aerosp. Eng. 222(1), 63–80 (2008)
Kim, K., Strganac, T.: Aeroelastic Studies of a cantilever wing with structural and aerodynamic nonlinearities. In: 43rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference and Exhibit, AIAA, Reston (2002)
Yang, C., Huang, C., Wu, Z.G.: Progress and challenges for aeroservoelasticity research. ATCA Aeronaut. Astronaut. Sin. 36(4), 1011–1033 (2015)
Patil, M.J., Hodges, D.H.: Flight dynamics of highly flexible flying wings. J. Aircr. 43(6), 1790–1799 (2006)
Xie, C.C., Yang, L., Liu, Y., Yang, C.: Stability of very flexible aircraft with coupled nonlinear aeroelasticity and flight dynamics. J. Aircr. (2018)
Muravyov, A.A., Rizzi, S.A.: Determination of nonlinear stiffness with application to random vibration of geometrically nonlinear structures. Comput. Struct. 81, 1513–1523 (2003)
Mignolet, M.P., Soize, C.: Stochastic reduced order models for uncertian geometrically nonlinear dynamical systems. Comput. Methods Appl. Mech. Eng. 197, 3951–3963 (2008)
McEwan, M.I., Wright, J.R., Cooper, J.E., Leung, A.Y.T.: A combined modal/finite element analysis technique for the dynamic response of a nonlinear beam to harmonic excitation. J. Sound Vib. 243(4), 601–624 (2001)
Harmin, M.Y., Cooper, J.E.: Aeroelastic behavior of a wing including geometric nonlinearities. Aeronaut J. 115(1174), 767–777 (2011)
Xie, C.C., An, C., Liu, Y., Yang, C.: Static aeroelastic analysis including geometric nonlinearities based on reduced order model. Chin. J. Aeronaut. 30(2), 638–650 (2017)
An, C., Yang, C., Xie, C.C., Yang, L.: Flutter and gust response analysis of a wing model including geometric nonlinearities based on a modified structural ROM. Chin. J. Aeronaut. 33(1), 48–63 (2020)
Clough, R.W., Wilson, E.L.: Dynamic analysis of large structural systems with local nonlinearity. Comput. Method Appl. Mech. Eng. 17(18), 107–129 (1979)
Tan, M.A., Cai, C.W.: Substructure method in local nonlinear system response analysis (in Chinese). Vib. Shock 23, 25–34 (1987)
Fey, R.H.B., Van Campen, D.H., Kraker, D.: Long term structural dynamics of mechanical systems with local nonlinearities. J. Vib. Acoust. 118, 147–153 (1996)
Bernhammer, L.O., Breuker, R.D., Karpel, M.: Geometrically nonlinear structural modal analysis using fictitious masses. AIAA J. 55(10), 3584–3593 (2017)
Kantor, E., Raveh, D.E., Cavallaro, R.: Nonlinear structural, nonlinear aerodynamic model for static aeroelastic problem. AIAA J. (2018)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 Chinese Aeronautical Society
About this paper

Cite this paper
Chao, A., Duoyao, Z., Changchuan, X. (2023). Flutter Analysis of Large Flexible Aircraft Based on Reduced Order Model. In: Chinese Society of Aeronautics and Astronautics (eds) Proceedings of the 10th Chinese Society of Aeronautics and Astronautics Youth Forum. CASTYSF 2022. Lecture Notes in Electrical Engineering, vol 972. Springer, Singapore. https://doi.org/10.1007/978-981-19-7652-0_20
Download citation
DOI: https://doi.org/10.1007/978-981-19-7652-0_20
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-7651-3
Online ISBN: 978-981-19-7652-0
eBook Packages: EngineeringEngineering (R0)