
Abstract
A new precise point positioning (PPP) service has been provided by BeiDou global navigation satellite system (BDS-3). The correction parameters are broadcasted by PPP-B2b signal of GEO satellites in real time, including precision orbit correction, clock difference correction and et al. for BDS-3 and other GNSS. The PPP service can be realized with dynamic decimeter level and static centimeter level at China and surrounding areas. Firstly, the area of PPP-B2b service is analyzed based on the threshold of DOP value, and the concerned problems are also pointed out in use, such as the matching problem between correction parameters. Then the evaluation is conducted for three types of correction parameters broadcasted by PPP-B2b. Lastly, the performance of static PPP and kinematic PPP is also evaluated comprehensive, and suggestions is also gave for the PPP-B2b applications.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Without setting up reference stations, Precise Point Positioning (PPP) technology can achieve real-time decimeter-level positioning by using a single GNSS high-precision receiver. It has been widely used in marine engineering construction and maintenance such as offshore oil exploration, seabed mapping and offshore optical cable laying, as well as precision agriculture [1, 2].
However, PPP technology needs the support of precise differential correction information. In essence, PPP service system is a generalized wide area differential precision positioning system based on carrier phase. And the corresponding terminal positioning technology is called PPP technology. The wide area differential precision positioning system accurately determines GNSS satellite orbit corrections and satellite clock difference corrections based on carrier phase observations. And the corrections are predicted at centimeter level in real time. Then the corrections are transmitted to high-precision users globally through communication satellites or the Internet. And the Real Time dynamic PPP (RT-PPP) can be achieved at 20–30 cm (1 σ) level [3,4,5,6,7]. The static PPP can be carried out better than centimeter level by using post precision ephemeris. Owing to the vector separation of satellite ephemeris error, satellite clock error and ionosphere delay error by wide area differential precision positioning system, the performance of PPP is no longer affected by distance factors. At present, the commercial system based on RT-PPP technology includes Starfire system of NavCom company [8], OmniSTAR system and Seastar system of Fugro company [9] and RTX service of Trimble company [10]. The international IGS organization also provides precise orbit and precise clock difference information used for RT-PPP technology for global users free of charge. And these information are transmitted through the Internet based on RTCM SSR protocol [11, 12]. At the end of July 2020, BDS-3 was put into operation. The B2b signals of GEO satellite are used for broadcasting the precision orbit correction, precise clock difference correction and other correction parameters of BDS-3 and other GNSS in real time. The PPP service can be realized with dynamic decimeter level and static centimeter level at China and surrounding areas [13].
This paper aims to evaluate the performance of BDS-3 PPP-B2b service. Firstly, the area of PPP-B2b service is analyzed based on the threshold of DOP value, and the concerned problems are also pointed out in use, such as the matching problem between correction parameters. Then, the evaluation is conducted for three types of correction parameters broadcasted by PPP-B2b, including satellite orbit correction, satellite clock difference correction and DCB correction. Finally, the dynamic and static performance of PPP service is also evaluated.
2 PPP Service Area
The correction information for PPP service is broadcasted through B2b signals of three GEO satellites. The area of PPP service is not completely consistent with the coverage of PPP-B2b signal. The main reason is that the correction information is calculated based on the regional tracking station network, and only the correction parameters of satellite arc segments can be obtained. As below, the area is analyzed based on the threshold of DOP value for PPP service.
2.1 Service Area
At present, the correction parameters of BDS-3 and GPS satellites are broadcasted by PPP-B2b signal. The DOP values of grid point will be calculated by using the broadcast ephemeris and PPP-B2b correction information. And the satellite, which correction parameters match with its broadcast ephemeris, is only used for calculating the DOP value. In this paper, the DOP values of grid point with 5° × 5° at the regions (70 °N–30 °S, 30 °E–180 °E) are calculated for one week from March 2 to 8, 2021. And the sampling interval is 30 s. Taking HDOP < 10 and VDOP < 10 as threshold conditions, the areas of PPP-B2b service are evaluated for BDS-3 and combined BDS-3/GPS. See Fig. 1 and 2 for details.

The area of PPP-B2b service for BDS-3 PPP

The area of PPP-B2b service for Beidou/GPS PPP
It can be seen from Fig. 1 and 2 that the core service area of BDS-3 PPP is concentrated in the southeast coastal area of China. And the HDOP value is about 1.5, the VDOP value is about 2.5. In western Xinjiang, the DOP value is poor for single BDS-3, and the VDOP value can reach more than 5. The better performance can be provided for the BDS-3/GPS PPP in the areas of 10 °S–70 °N and 60 °E–160 °E. And the HDOP value is less than 2, the VDOP value is less than 3. Lastly, the DOP value increases rapidly when it is far away from the core service area, which is mainly due to the correction parameter is calculated by using the data of regional tracking station network.
2.2 Correction Parameter Matching
In addition to the availability of correction parameters, the matching of correction parameters will also affect the performance of PPP-B2b service. The concerned problems are given below.
Corrections and Broadcast Ephemeris Matching.
The IODN parameter broadcasted by PPP-B2b is used to match correction parameters with broadcast ephemeris. The correction parameters can be used only when its IODN parameter matches with the IOD parameter of broadcast ephemeris [13]. For BDS-3, correction parameters are used to correcting CNAV1 ephemeris for B1C, which cannot be matched with the ephemeris for B1I or B3I. Additionally, due to the time delay of the correction parameter updating, the IODN parameter of corrections is still matched with the previous group of broadcast ephemeris at the initial few epochs of ephemeris updating. At this time, the previous broadcast ephemeris should be used for matching correction parameters.
Orbit Correction and Clock Difference Correction Matching.
The IOD CORR parameters are used to matching orbit corrections with clock difference corrections. The orbit corrections can be used together with clock difference corrections only when the IOD CORR of orbit corrections matches with that of clock difference corrections [13]. The update period of clock difference correction is 6 s, and that of orbit correction is 48 s. Then there will be a short mismatch between them when the IOD CORR parameter changes. Figure 3 shows the time series of IOD CORR parameters for C29 satellite on March 2, 2021. In the period A, the IOD CORR parameter of orbit correction matches with that of clock difference corrections, and they are equal to 1. However, when the clock difference correction is updated at time T3, its IOD CORR parameter change to 2. And the corresponding orbit correction is still the value at time T1. At the same time, they will be changed to the mismatched state. The next matching state will be realized again until the orbit correction is updated at time T4. In other words, there will be a short mismatched state in the period B. The solution is that the matched correction parameters should continue to be used until the orbit correction is updated, which has little impact on the positioning performance.

The time series of IOD CORR for C29 satellite
Time Matching of Corrections for Crossing Days.
When decoding the original message, the frame time in the format of hour, minute and second of month, day and year and the time of correction information in the format of second within the day of BDT will be resolved. The complete time of correction information will be determined based on the second within the day cooperated with the month, day and year in the frame time. However, the mismatched state will be appeared between the day and the second within the day when crossing days. The solution is that the seconds with the day should be adjusted if it is a time period of crossing day. For example, when the second within the day is a larger number, the difference between the frame time and the time of correction information is determined firstly, then the day should be adjusted if the difference is greater than a certain value.
3 Evaluation of Correction Parameter
At present, correction information is broadcasted only for BDS-3 and GPS. The correction parameters of BDS-3 and GPS will be evaluated below.
3.1 Evaluation Method
Orbit Correction.
For real-time orbit evaluation, the precision ephemeris released by IGS is selected as the reference. And the precision is better than 20 cm for the orbit products released by GFZ [4,5,6]. The broadcast ephemeris of BDS-3 is determined based on the Beidou coordinate system (BDCS), while the IGS orbit products is determined based on the ITRF framework. The difference between BDCS and ITRF is in the centimeter level. Then the orbit error caused by the different coordinate framework can be ignored. Additionally, the broadcast ephemeris for BDS-3 and GPS is the phase center coordinates of satellite antenna, while the precision ephemeris is the mass center coordinates of satellite. Therefore, the correction of antenna phase center should be made to the precise orbit. In this paper, the latest igs14.atx file released by IGS is used to correct for precise orbit.
Clock Difference Correction.
For real-time clock difference evaluation, the precision clock difference released by IGS is also used as the reference. And the precision of the clock difference released by GFZ is better than 0.6 ns [4,5,6]. Before comparison, it is necessary to unify the frequency reference and time reference. The frequency reference of BDS-3 broadcast clock difference is B3 frequency, while the frequency reference of IGS precision clock difference is the ionosphere-free combination for B1I/B3I. Therefore, it is necessary to correct the BDS-3 broadcast clock difference by TGD and change its frequency reference to the ionosphere-free combination for B1I/B3I. Additionally, because the time reference of broadcast clock difference and precision clock difference are different, there is a time reference deviation varying with epoch between them. Then a reference satellite can be selected and the time reference deviation will be eliminated by the quadratic difference method.
DCB.
For real-time DCB evaluation, the DCB product released by the Chinese Academy of Sciences (CAS) is used as the reference. Its standard deviation is about 0.1 ns. And the types of DCB mainly include B1I-B3I, B1C-B2a, B1C-B3I, B1C-B2b, etc. Considering that the DCB parameters broadcast by PPP-B2b are relative to B3I signal, the corresponding DCB parameters released by CAS should be firstly translated to the B3I signal as reference and then the evaluation is conduced.
3.2 Precision of Correction Parameters
The precision of correction parameter is evaluated by using the PPP-B2b messages from March 2 to 8, 2021, which is collected by BDS-3 receiver in Beijing.
Orbit Correction.
The orbit correction plus the corresponding broadcast ephemeris is compared with the precision ephemeris provided by GFZ, which has been reduced to the phase center of satellite antenna. The results are shown in Table 1.
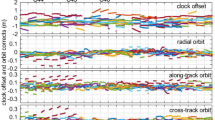
It can be seen from Table 1 that after correction parameters are used to correct the broadcast ephemeris, the RMS of the radial, along and cross direction is 8.7 cm, 13.4 cm and 18.6 cm respectively for BDS-3 MEO satellite. The RMS of the radial, along and cross direction is 17.4 cm, 31.3 cm and 36.1 cm respectively for BDS-3 IGSO satellite. And the RMS of IGSO satellite is about twice that of MEO satellite. The RMS of the radial, along and cross direction is 2.1 cm, 4.9 cm and 4.3 cm respectively for GPS satellite. The orbit precision of GPS is significantly better than BDS-3, which is mainly due to the more mature error model and antenna phase correction for GPS.
Clock Difference Correction.
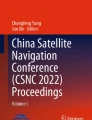
Taking MGEX high-precision clock difference released by GFZ as the reference, the precision of clock difference correction is evaluated based on the secondary difference. The results are shown in Fig. 4.

The errors of satellite clock difference corrected for PPP-B2b (20,210,304)
It can be seen from Fig. 4 that there is an obvious stratification phenomenon in the series of satellite clock difference. And there is a systematic deviation of non-zero mean in the series of clock difference, which may be caused by pseudo-range deviation. However, the deviation of non-zero mean will be absorbed by the ambiguity parameter. And the deviation has no effect on the performance of PPP.
In order to eliminate the influence of non-zero mean, the standard deviation (STD) is used to evaluate the precision of clock difference correction. The precision is 0.24 ns, 0.23 ns for BDS-3 and GPS respectively.
DCB.
Taking the DCB products released by CAS as the reference, the precision of DCB parameters is evaluated. The results of the DCB relative to B3I for B1I, B1C and B2a are shown in Fig. 5.

The differences of DCB for B1I, B1C, B2a provided by PPP-B2b and CAS (20,210,304)
Figure 5 shows that the difference between the DCB for B1I and the corresponding DCB released by CAS is in decimeter level. And the corresponding difference has an overall non-zero mean value for B1C and B2a, which is about –0.5 m and 3 m respectively. However, the non-zero mean value will be absorbed by the receiver clock difference and the performance of PPP will not be affected. Next, the statistics is made on the DCB eliminated the overall non-zero mean deviation, which is calculated by averaging deviation for single frequency. The STD of DCB for B1I, B1C and B2a is 0.19, 0.22 and 0.23 respectively.
It should be noted that the DCB directly affects the pseudo-range precision, and then it affects the convergence time of PPP. Therefore, the DCB is needed to be corrected for the BDS-3 PPP. Additionally, the difference between the DCB and the TGD in basic navigation message is very small. When the DCB is missing, the corresponding TGD can be used to replace the DCB directly. For analogous GPS satellites (such as GPS/QZSS/IRNSS), the DCB is eliminated in the ionosphere-free combination model. Therefore, the DCB should not be corrected for analogous GPS dual frequency PPP.
4 PPP Performance Evaluation
4.1 Evaluation Method
Evaluation Method for the Precision of PPP.
The externally obtained high-precision coordinate is used as the reference. The root mean square error (RMS) is adopted for evaluating the precision of PPP. It should be noted that the precision of PPP is conducted only by using the results after convergence.
Evaluation Method for Convergence Time.
The convergence time is the time interval from the initial epoch to the successful convergence epoch. The convergence condition is that the horizontal and vertical positioning error is less than a certain threshold for 20 consecutive epochs. In this paper, three standards of threshold are used as the judgment condition of convergence. The error in horizontal plane is less than 30 cm, 20 cm and 10 cm. And the corresponding error in vertical direction is less than 60 cm, 40 cm 20 cm respectively.
4.2 Testing Data
The split BDS-3 receivers are used to collect data in Beijing and Haikou. And the integrated surveying receivers produced by South surveying & mapping Instrument CO., Ltd are used to collect data in Guangzhou. The post mode is used to verify the performance of PPP. The information for four testing data is summarized in Table 2. In order to fully verify the performance of PPP, the integrated surveying receivers distributed at 26 provinces in China, are also used for nationwide testing with a data length of about 4–24 h in May 2021.
The reference coordinates will be the last epoch result of GPS static PPP solved by CSRS-PPP(NRCAN) software. When the observation time reaches to 4 h, the precision in the horizontal and vertical direction is in millimeters.
4.3 Static Performance
Precision of Static PPP.
The precision of static PPP for BDS-3 and BDS-3/GPS will be shown in Table 3 and Table 4 respectively.
Table 3 and 4 shows that the precision for BJ03 and HK01 are significantly higher than that for 2719, CHDS and 26 nationwide data. There are two main reasons. Firstly, the data quality is different. The data for BJ03 and HK01 are the data of monitor station. And the other data are collected by user terminals. Secondly, the data length is different. The data length for BJ03 and HK01 is 7 days. And the others are mostly less than 10 h. The precision for BDS-3 is better than 12 cm and 16 cm in horizontal and vertical direction respectively. And the precision is better than 10 cm and 13 cm for BDS-3/GPS (Table 5).
The above table shows that the precision of BDS-3 PPP for whole day is about 5 cm in horizontal and vertical direction. And the precision of BDS-3/GPS PPP is between 3–4 cm. For static PPP for whole day, the precision in centimeter level can be achieved for single BDS-3 and BDS-3/GPS combination.
In some areas where it is difficult to obtain high-precision datum coordinates, the static PPP technique provides a convenient way to obtain high-precision coordinate information in centimeter level.
Convergence Time.
The convergence time of static PPP is evaluated by using the data collected by split BDS-3 receivers in Beijing on March 4, 2021 (24 h). It is reinitialized every hour and averaged slip at 12 min intervals. The convergence times will be counted to achieve the specified precision. The results are shown in Table 6.
The above table shows that for H ≤ 0.1 m and V ≤ 0.2 m, the convergence time is about 35–38 min and 32–33 min for BDS-3 and BDS-3/GPS respectively.
Conclusively, the performance of static PPP for B1C/B2a is slightly better than B1I+B3I. And the performance for BDS-3/GPS is better than single BDS-3.
4.4 Dynamic Performance
Precision of Dynamic PPP.
The precision of dynamic PPP for BDS-3 and BDS-3/GPS will be shown in Table 7 and Table 8 respectively.
Table 7 and 8 shows that the precision of dynamic PPP is significantly lower than static PPP. It is better than 18 cm and 24 cm in horizontal and vertical direction for BDS-3. And it is better than 15 cm and 16 cm for BDS-3/GPS.
Convergence Time.
The convergence time of dynamic PPP is evaluated by using the same data and method as 4.3.2. The results are shown in Table 9.
Table 9 shows that the convergence time of dynamic PPP for BDS-3 is about 15 min for H ≤ 0.3 m and V ≤ 0.6 m. And it is about 20 min for H ≤ 0.2 m and V ≤ 0.4 m. The convergence time for B1C/B2a is slightly better than B1I/B3I. For BDS-3/GPS, it is about 18 min for H ≤ 0.2 m, V ≤ 0.4 m.
Conclusively, the performance of dynamic PPP for B1C/B2a is slightly better than B1I/B3I. And the performance for BDS-3/GPS is better than single BDS-3.
The static and dynamic performance for B1C/B2a are slightly better than B1I/B3I. The main reason is that the frequency interval of B1C/B2a is larger, which is conducive to eliminating ionosphere delay. Additionally, the noise factor ionosphere-free combination for B1C/B2a is 2.588, while it is 3.528 for B1I/B3I. Therefore, the smaller observation noise induces the better performance.
5 Conclusions
The performance of PPP-B2b service for BDS-3 is verified by using the nationwide testing data. The main conclusions are as follows:
Service Area:
The core service area of BDS-3 PPP is concentrated in the southeast coastal area of China. And the HDOP and VDOP value is about 1.5 and 2.5 respectively. The better performance can be provided for the BDS-3/GPS PPP in the areas of 10 °S–70 °N and 60 °E–160 °E.
Correction Precision:
The RMS of the radial, along and cross direction is 8.7 cm, 13.4 cm and 18.6 cm respectively for BDS-3 MEO satellite. It is 17.4 cm, 31.3 cm and 36.1 cm for BDS-3 IGSO satellite. And it is 2.1 cm, 4.9 cm and 4.3 cm for GPS satellite. The precision of clock correction is between 0.2–0.3 ns. The precision of the DCBs for B1I, B1C and B2a are 0.2 m or so. The difference between the DCB broadcasted by PPP-B2b for B1I and the corresponding DCB released by CAS is in decimeter level. The corresponding difference has an overall non-zero mean value for B1C and B2a, which is about −0.5 m and 3 m respectively.
Static Performance:
For the thresholds of H ≤ 0.1 m and V ≤ 0.2 m, the convergence time is about 35–38 min and 32–33 min for BDS-3 and BDS-3/GPS respectively. The precision is in several centimeters level for whole day. In some areas where it is difficult to obtain datum coordinates, the static PPP technique provides a convenient way.
Dynamic Performance:
It is better than 18 cm and 24 cm in horizontal and vertical direction for BDS-3. And it is better than 15 cm and 16 cm for BDS-3/GPS. For H ≤ 0.2 m and V ≤ 0.4 m, the convergence time is about 20 min and 18 min for BDS-3 and BDS-3/GPS respectively.
The performance of static and dynamic PPP for B1C/B2a has slightly better than B1I/B3I. And the performance of static and dynamic PPP for BDS-3/GPS is better than single BDS-3.
References
Zumberge, J.F., Heflin, M.B., Jefferson, D.C., Watkins, M.M., Webb, F.H.: Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 102(B3), 5005–5017 (1997)
Kouba, J., Heroux, P.: Precise point positioning using IGS orbit and clock products. GPS Solut. 5(2), 12–28 (2001). https://doi.org/10.1007/PL00012883
Yang, Y., Guo, H., He, H.: Principle of Satellite Navigation and Positioning, pp. 280–295. National Defence Industry Press, Beijing (2021)
Kazmierski, K., Sośnica, K., Hadas, T.: Quality assessment of multi-GNSS orbits and clocks for real-time precise point positioning. GPS Solut. 22, 11 (2018). https://doi.org/10.1007/s10291-017-0678-6
Elsobeiey, M., Al-Harbi, S.: Performance of real-time Precise Point Positioning using IGS real-time service. GPS Sol. 20, 565–571 (2015). https://doi.org/10.1007/s10291-015-0467-z
Jiao, G., Song, S.: Application Test of iGMAS integrated products based on PPP. J. Geod. Geodyn. 39(11), P1171-1177 (2019)
Zhang, X., Li, X., Li, P.: Review of GNSS PPP and its application. Acta Geodaetica et Cartographica Sinica 46(10), 1399–1407 (2017)
Dai, L., Chen, Y., Lie, A., Zeitzew, M., Zhang, Y.: StarFire SF3: worldwide centimeter-accurate real time GNSS positioning. In: Proceedings of ION GNSS + 2016, Portland, Oregon, USA, September 12–16 2016, pp. 3295–3320 (2016)
Booth, J.S., Snow, R.N.: An evaluation of OmniStar XP and PPP as a replacement for DGPS in airborne applications. In: Proceedings of ION GNSS 2009, Savannah, Georgia, USA, September 22–25, pp. 1188–1194 (2009)
Leandro, R., et al.: RTX positioning: the next generation of cm-accurate real-time GNSS positioning. In: Proceedings of ION GNSS 2011, Portland, Oregon, USA, September 20–23 (2011)
Laurichesse, D., Mercier, F., Berthias, J.P., Broca, P., Cerri, L.: Integer ambiguity resolution on undifferenced GPS phase measurements and its application to PPP and satellite precise orbit determination. Navigation 56(2), 135–149 (2009)
Kazmierski, K., Zajdel, R., Sośnica, K.: Evolution of orbit and clock quality for real-time multi-GNSS solutions. GPS Solut. 24, 111 (2020). https://doi.org/10.1007/s10291-020-01026-6
BeiDou Navigation Satellite System Interface specification Precise Point Positioning Service Signal PPP-B2b (Version 1.0). China Satellite Navigation Office ( July 2020)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 Aerospace Information Research Institute
About this paper

Cite this paper
Guo, H., Xu, Y., Xiao, H., Li, J., He, H. (2022). Performance of Precise Point Positioning for BDS-3 PPP-B2b Service. In: Yang, C., Xie, J. (eds) China Satellite Navigation Conference (CSNC 2022) Proceedings. Lecture Notes in Electrical Engineering, vol 910. Springer, Singapore. https://doi.org/10.1007/978-981-19-2576-4_28
Download citation
DOI: https://doi.org/10.1007/978-981-19-2576-4_28
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-2575-7
Online ISBN: 978-981-19-2576-4
eBook Packages: EngineeringEngineering (R0)