
Abstract
Electric energy is used as the power source for electromagnetic launch system, and the linear motor of the system can be precisely controlled. Rapid loading can realize low-cost, high-density and rapid continuous launching of UAV, meet the requirements of diversified combat capabilities of UAV in future wars, and improve the comprehensive combat performance of UAV. At the same time, electromagnetic boost launch can control the ejection process acceleration according to the take-off requirements of UAV, and realize the safe and reliable ejection take-off of various TYPES of UAV, which has the characteristics of universality. To achieve the advantages of highly controllable and fast relaunching, this paper conducts a research on the 100 kg UAV electromagnetic launch system, specifically introduces the control strategy of the UAV electromagnetic launch system based on the field-oriented control. A 100 kg UAV electromagnetic launch prototype is built, and the proposed control strategy of the system is verified by experiments. The experiment results show that the electromagnetic launch of the UAVs is stable and reliable and it can meet the demands of fast relaunch of the UVAs.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
In recent years, UAV and its related technologies have been rapidly developed and applied all over the world. It should also be noted that the rapid launch and reliable recovery of UAVs are the difficulties encountered in the development of UAVs [1, 2]. UAV launch refers to the process that UAV can reach a certain initial speed in a certain place and in a certain way. The launch of UAVs has a direct impact on the battlefield survivability, reusability, regional adaptability and operational flexibility of UAVs [3].
There are various launch modes of UAV, such as taxiing take-off, rocket boost, ejection take-off, hand throw launch, airborne launch, vertical take-off, etc. In the specific selection, many factors such as UAV model, quality, size, service conditions and combat tasks should also be fully considered. The most basic requirement for UAV launch system is that UAV can take off safely and reliably, among which handcast launch is only suitable for launching micro-UAV, and vertical take-off is only suitable for taking off rotorcraft UAV. Taxiing takeoff refers to the UAV taking off on the runway through the landing gear by using the thrust of its own engine. The advantages of this method are simple and reliable, less supporting ground support equipment, small acceleration overload and low use cost; Its disadvantage is that it needs runway or better ground environmental conditions and poor mobility. Rocket assisted launch means that UAV uses the thrust of rocket booster to accelerate its launch in a short time. It has the advantages of small floor area, low initial investment and little influence by environmental conditions, and can well meet the requirements of fast and mobile battlefield; Its disadvantage is that it involves the storage, transportation and use of explosive materials, and has strong physical characteristics such as sound, light and smoke, which are easy to expose the launching position [4].
Ejection take-off is to convert different forms of energy such as liquid/pneumatic energy, elastic potential energy and electromagnetic energy into UAV kinetic energy, so as to accelerate UAV to safe take-off speed on a certain length of slide rail. The advantage of ejection take-off is that it does not need a special take-off airport and runway, has good mobility, can take-off in mountainous areas with limited space, and has good safety and concealment; Its disadvantage is that the ejection mechanism and control system are complex [5, 6].
According to the different launching power energy, ejection takeoff can be divided into elastic ejection, pneumatic ejection, electromagnetic boost launch and so on. The main characteristics are compared in Table 1. (1) Elastic ejection: the elastic force of the rubber band helps the UAV to take off. The advantages of this way are simple structure, low cost and easy operation and maintenance; The disadvantage is that the catapult thrust is small, the UAV’s exit speed is low. In plateau conditions, the air is thin, and the ejection speed is difficult to meet the requirements of UAV take-off. (2) Pneumatic ejection: the UAV is boosted to take off by air pressure. This ejection method can provide larger outlet speed for the UAV, and is flexible in use and good in concealment. However, the pressure system is susceptible to the environment, especially the low pressure brought by high altitude, which will affect the thrust force of pneumatic ejection. In addition, the overload control ability of the pneumatic ejection system is weak in the process of ejection takeoff, and the ability of rapid and continuous ejection is poor. (3) Electromagnetic boost launch: It is a new UAV launch technology that uses electric energy as energy and accelerates objects through electromagnetic thrust generated by the principle of electromagnetic action, and converts electric energy into launch power efficiently to achieve catapult takeoff of UAV.
The electromagnetic boost launch system can control the acceleration of the ejection process according to the requirements of UAV ejection, and realize the safe and reliable ejection take-off of UAV. At the same time, the electromagnetic boost launch system is suitable for the launch of UAVs with the maximum payload weight below, which meets the needs of the launch platform generalization. The electromagnetic launch of UAV with different weight and take-off speed can be realized quickly by parameter binding. Due to the use of electric energy as the power source, the operation process of linear motor is accurate and controllable. Through rapid loading, low-cost, high-density and rapid continuous launching of UAV can be realized, which can meet the requirements of diversified combat and anti-saturation attack capability of UAV in future wars, and improve the comprehensive combat performance of UAV.
In order to realize the advantages of strong controllability of the launch process and rapid repeated launch of the electromagnetic boost launch system, this paper takes the 100 kg UAV electromagnetic boost launch system as the research object, focuses on the key control technology of the unmanned electromechanical magnetic boost launch system based on vector control, and introduces the composition of the 100 kg UAV electromagnetic boost launch system. The key control technology of the system is verified by 65 kg simulated load test, which lays a foundation for the application of UAV electromagnetic boost launch system.
2 Key Control Technology of UAV Electromagnetic Boost Launch System
The electromagnetic boost launch system of 100 kg UAV is mainly composed of linear motor electromagnetic boost launcher, driving power supply system and system controller. The system composition is shown in Fig. 1.

Electromagnetic launch system composition for fixed wing UAV
The UAV electromagnetic boost launch system uses electric energy as power energy, charges the energy storage module through the charging module in the charge-discharge combination, reaches the set bus voltage, and enters the launch readiness state. Press the transmit button, and the power module converts the electric energy of the energy storage module into the ac power required by the linear motor drive according to the preset program of the control module. The stator conduction where the actuator is located is controlled by the winding segmented controller to generate electromagnetic thrust and accelerate the actuator, pulley and UAV connected with the pulley to realize the conversion of electric energy to the kinetic energy of the launch load and push the UAV to leave the launch pad at a preset target speed. The high-speed linear electromagnetic booster actuator and pulley are braked by electromagnetic and mechanical buffering brake units. After the launch, the actuator is reset to enter the next launch process.
2.1 Mathematical Model of Linear Motor
The executive mechanism of 100 kg UAV electromagnetic boost launch system is three-phase permanent magnet synchronous linear motor. Since the UAV is connected with linear electric motor through pulley, we transform the control of UAV ejection process into the control of permanent magnet synchronous linear motor.
The stator of permanent magnet synchronous motor is composed of permanent magnet, and the electromagnetic coupling relationship between the stator and permanent magnet is complicated. In the construction of mathematical model, it is necessary to ignore the harmonic component, windings spatial distribution and other factors that have little influence. The current, voltage and flux in the three-phase stator windings in ABC coordinate system are transformed to the rotating D-Q coordinate system by coordinate transformation, and the mathematical model of three-phase permanent magnet synchronous motor is obtained.
The stator voltage equation is:
Flux equation is:
In the formula, ud and uq respectively represent the components of the stator voltage on the d and q axes; Rs represents the equivalent resistance of each phase winding of the stator; id and iq respectively represent the components of the stator current in the d and q axes; ud and ψq Respectively represent the components of the stator flux on axis d and q; ωr represents rotating electric angular velocity; Ld and Lq are components of the stator inductance in the d and q axes respectively; ψf is mover permanent magnet flux linkage. Because the system adopts hidden pole bilateral permanent magnet synchronous linear motor, Ld approximately equals to Lq, then Ld = Lq. Ignoring the influence of temperature change on permanent magnet, ψf can be considered as a constant. The voltage equation is:
The electromagnetic thrust equation of hidden pole permanent magnet synchronous linear motor is:
In the formula, Pn is the number of motor poles, τ is the pole distance of linear motor.
Due to the long length of the linear motor, considering the efficiency of the drive power supply and the cost of the whole electromagnetic boost launch system, the linear motor needs to be segmented, and the stator segmented working time is determined by the position of the actuator. The mathematical model mentioned in Eqs. (3) and (4) is the mathematical model of single-segment permanent magnet synchronous linear motor with the actuator and stator completely overlapping, and the mathematical model of stator segment 1 at t1 in Fig. 3. At t2, the actuator is between stator segment 1 and stator segment 2, and the mathematical model of PMSM is correlated with the relative position of the stator of the actuator. For the first stator segment, with the gradual withdrawal of the mover, the coupling area decreases, the amplitude of excitation potential decreases, the armature current increases and the electromagnetic thrust decreases. When the mover enters the second stator, the amplitude of the post excitation EMF gradually increases, the armature current decreases, and the electromagnetic thrust increases in the form of pulsation. When the mover is completely within the range of the second section of stator, the amplitude of excitation EMF remains unchanged and the output of the motor is relatively stable. When the mover is about to exit the second section of stator, with the decrease of excitation EMF amplitude, the armature current increases and the electromagnetic force decreases gradually. This is repeated.

Section of permanent magnet linear motor
The rotor position in the stator section of linear motor has an influence on the stator inductance d, q-axis inductance components Ld and Lq and rotor permanent magnet flux ψf in the mathematical model of permanent magnet synchronous motor. Ignoring the harmonic effect, the inductance components Ld and Lq and the flux linkage ψf of the mover permanent magnet change approximately linearly. As shown in Fig. 3(b), the mover length is a, the segment length of single section stator is b, and the mover displacement is s. for long primary linear motor, b > a, so the mover coefficient k is expressed as:
By substituting Eq. (5) into Eq. (3), the voltage equation of permanent magnet synchronous linear motor is:
Where, Ls is the synchronous inductance of the linear motor, as shown in Fig. 2. When the stator segment 1 and t1 time actuator overlap completely, the synchronous inductance is L1. As shown in Fig. 2, when the stator section 3 is completely separated from the mover at time t1, the synchronous inductance is L0, then the synchronous inductance is L0
At t2 switching time, the mover is in the middle of stator section 1 and stator section 2. When power supply 1 and power supply 2 are energized at the same time to ensure that the current iq of stator section 1 and stator section 2 remains unchanged, the electromagnetic field of the mover does not change, which is consistent with that when it is completely overlapped. The electromagnetic thrust generated by the linear motor is still shown in Eq. (4). Therefore, in order to reduce the thrust fluctuation in the launch process of UAV electromagnetic boost, it is necessary to ensure that the q-axis current generated by each current source remains unchanged during operation.
2.2 Field-Oriented Control
Vector control technology is based on the idea that dc motor armature current and excitation current are perpendicular to each other without coupling independent control [7]. The common vector control method is control, in which all the current of the motor (ignoring the loss) is used to generate thrust, and the thrust of the linear motor can be controlled [8, 9]. According to the linear motor mathematical model, the vector control block diagram is shown in Fig. 3.

Diagram of field-oriented control
In the formula, Vref is the given value of speed. In order to ensure the rapid and repeated ejection of the UAV electromagnetic boost launch system, the actuator needs to return to the initial position quickly after the UAV takes off, so as to prepare for the launch of the next ejection. The whole electromagnetic boost launch process is divided into three stages: accelerated ejection, deceleration braking and uniform recovery.
(1) Acceleration ejection stage: the acceleration ejection stage provides the UAV with the take-off speed, and the acceleration load is the sum of the UAV's weight mt and the weight mr of the pulley itself. In the process of accelerated ejection, the acceleration process is required to be smooth. The exit speed reaches the takeoff speed v0, so the speed outer ring is not required in the acceleration ejection stage. Only the reference value of the current inner ring needs to be set to the q-axis current iq1 corresponding to the thrust F required for UAV acceleration, and keep the q-axis current iq1 unchanged when the UAV is less than the release speed v0. If the acceleration direction is the positive direction of q-axis, the given value iq1 is positive at this time. When the UAV reaches the release speed V0, it is in position S0. Since the mover pulley starts to slow down and brake, the UAV is ejected at the takeoff speed v0 to complete the takeoff process. In the whole acceleration ejection stage, the acceleration of UAV is regulated by q-axis current, and the whole process is stable and controllable.
(2) Deceleration braking stage: after the acceleration stage, the UAV and the mover pulley are accelerated to the takeoff speed v0. At this time, the UAV and the mover pulley need to be separated and decelerated as soon as possible to effectively reduce the total length of the linear motor. At this time, the speed outer loop is also not required. Only the reference value of the current inner loop needs to be set to the q-axis current value iq2 corresponding to the maximum current of the inverter. The given value iq2 is negative. When the final mover speed is 0, it is in position S1. Since the load in the deceleration braking stage is only the weight mr of the mover pulley itself, the deceleration distance can be controlled very short.
(3) At uniform speed return stage: after the actuator completes the fast deceleration braking, it is necessary to immediately return the actuator to prepare for the next ejection. The return process should be stable and reliable. At this time, the control strategy is the double closed-loop control of the outer speed loop and the inner current loop. Given the return velocity vref, when approaching the initial position, the corresponding deceleration current is given to ensure that the actuator returns to the initial position at a uniform speed, so as to prepare for the next UAV electromagnetic boost launch, and the whole launch process ends.
3 100 kg UAV Electromagnetic Boost Launch System
The 100 kg UAV electromagnetic boost launch system is built, which is mainly composed of linear motor electromagnetic boost emitter, drive power system and system controller. This section mainly introduces two parts: electromagnetic boost emitter and drive power.
Electromagnetic boost launcher is the actuator of UAV electromagnetic boost launch system, which converts electric energy into kinetic energy of load through electromagnetic energy conversion. The electromagnetic booster launcher is connected to the UAV via a pulley and contains the following core components.The physical picture of the electromagnetic booster launcher is shown in Fig. 4.

Electromagnetic launch system for 100 kg fixed wing UAV
The driving power is the control center and energy source of the UAV electromagnetic boost launch system. The control system converts the stored electrical energy into the electrical energy required by the electromagnetic boost emitter, including the following core components.The physical picture of the drive power supply is shown in Fig. 5.

Driving power for electromagnetic launch system
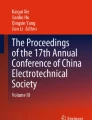
The 100 kg UAV electromagnetic launch prototype is built, and the proposed control strategy of the system is verified by experiments, the experiment results is shown in Fig. 6.

65 kg, 28.5 m/s experiment results
As shown in Fig. 6, the maximum speed of the 65 kg simulated load is 28.5 m/s, the farthest displacement is 5.6 m and the braking distance is 1.1 m. In the acceleration ejection stage, the mover acceleration of the electromagnetic boost launch system fluctuates slightly by about 9 g, and the maximum acceleration in the deceleration braking stage exceeds 30 g. In the stage of uniform return, the speed is about 2 m/s. It can be seen from the figure that the acceleration of the electromagnetic boost launch system is stable and controllable in the acceleration ejection stage. After the ejection of the system, the mover can quickly return and wait for the next launch.
4 Conclusion
This paper mainly studies the control process and control strategy of UAV electromagnetic boost launch system from the perspective of control technology, and verifies the control technology through the 100 kg UAV electromagnetic boost launch system. The ejection index of 65 kg simulated load and 28 m/s exit speed is realized, and the whole ejection process is stable and controllable. After ejection, the linear electric motor quickly returns to its position to get ready for the next ejection and meet the conditions of rapid repeated launch. UAV electromagnetic propulsion launch system can provide a universal launch and recovery platform for UAV of different types and different qualities, greatly improve the cost-effectiveness ratio of UAV launch and recovery device, reduce the launch cost, and thus provide a foundation for the wider application of UAV. The combination of electromagnetic launch technology with hybrid/all-electric launch platform, battlefield energy and Internet technology can meet the demand of electromagnetic launch technology for high power and quick charging, and achieve compatibility with the new concept electromagnetic weapon system.
References
Hakim, M.L., et al.: Development of unmanned aerial vehicle (UAV) fixed-wing for monitoring, mapping and dropping applications on agricultural land. J. Phys. Conf. Ser. 2111(1), 012051 (2021)
Mozaffari, M., Saad, W., Bennis, M., et al.: A Tutorial on UAVs for wireless networks: applications, challenges, and open problems. Commun. Surv. Tut. 21, 2334–2360 (2019)
Tan, G., Kou, B., Wu, H., et al.: Dynamic sensorless detection of linear electromagnetic UAV launch. IEEE Trans. Plasma Sci. 39(1), 399–404 (2011)
Li, K., Chen, G.: Analysis of parachute recovery process for UAV based on launch rocket. IOP Conf. Ser. Mater. Sci. Eng. 569(3), 032066 (2019)
Liu, X.L., Xia, C.N., Ma, S.G.: The modeling and simulation of UAV pneumatic launch system. Appl. Mech. Mater. 299, 27–30 (2013)
Zhao, Z., Suzhen, W.U.: Research and simulation to the model of UAV hydraulic launch system. Mach. Tool Hydraulics 42(22), 130–132 (2014). (in Chinese)
Li, Y.: AC Motor Digital Control System. China Machine Press, Beijing (2002). (in Chinese)
Li, L.: Research on Speed Control Performance of Permanent Magnet Synchronous Motor Vector Control. Xi’an Polytechnic University, Xi’an (2019). (in Chinese)
Liu, H.: Research on Control Strategy and Algorithm Fusion of Permanent Magnet Synchronous Motor. Beijing: Graduate School of Chinese Academy of Sciences (2014). (in Chinese)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Li, Y., Zhang, D., Zhang, X., Ma, X., Yao, H., Li, Y. (2022). Research on Control Strategy of the Electromagnetic Launch System for Fixed Wing UAV. In: Liang, X., Li, Y., He, J., Yang, Q. (eds) The proceedings of the 16th Annual Conference of China Electrotechnical Society. Lecture Notes in Electrical Engineering, vol 890. Springer, Singapore. https://doi.org/10.1007/978-981-19-1870-4_17
Download citation
DOI: https://doi.org/10.1007/978-981-19-1870-4_17
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-1869-8
Online ISBN: 978-981-19-1870-4
eBook Packages: EngineeringEngineering (R0)