
Abstract
The current technological improvements are playing an important role in transportation industry and making it more advanced at each and every segments. At present the transportation industry is developing rapidly and its growth is increasing every year. Government is focusing on the environment friendly vehicle. For that electric vehicle (EV) is a game changer. For the past few decades electric vehicles and hybrid vehicles are improving rapidly in a vast manner. But also it carries some drawbacks as well. The drawbacks of electric vehicles are improving and changing day by day. There are many factors affecting the performance of the electric vehicles like battery efficiency, charging methods, and price. In our chapter we have developed a self-charging system for improving range of all-wheel drive electric vehicle by applying a method by which the vehicle get charged by itself when it’s in motion.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Due to the drawbacks in internal combustion engines (ICE’s) like unstable fuel price, causing severe pollution and CO2 emission people are really interested in buying electrical vehicles [5]. And also we are facing oil crisis sometimes, so it pushes everyone to the electric vehicle (EV) side and in upcoming few decades this will replace EV and hybrid vehicles [6]. But electrical vehicles have it’s own disadvantages which are undeniably huge [1]. So we have to make it work effectively because of few charging stations and low range. The charging of electric vehicles needs around 30 min to charge fully that is a time consuming task.
Then we are going to talk about range, electric vehicles are only store limited energy according to it’s battery capability, due to limited energy the range is also limited. There is lot of new study shows a prominent growth in energy saving technology [2, 4]. And also comes with a lot of challenges with it. For efficient performance and long range regenerating the system is necessary. At present a normal EV will travel up-to 100 km to 200 km range in single charge and there is not many charging stations like fuel stations and it takes a lot of time to charge [7].
This makes an inconvenience for users. There is also a lot of drawbacks are in electric vehicles and one of the main problem is it’s range [8]. On the other hand in upcoming years the all-wheel drive electric vehicles will replace rear and front wheel drive electric vehicles due it’s advantages and extraordinary performance, before getting into the topic we have to know about the advantages of all-wheel drive electric cars. The major advantages of all-wheel drive electric cars are reducing stopping distance, and ability to give a smooth ride on low friction surfaces and give better performance with low load and another main advantage of all-wheel drive electric vehicles are their performance and low maintenance [9]. So in future there is lot of advancements are going to come in all-wheel drive electric cars, so it is important to improvise it’s model, working and performance. But like all other electric cars quad-motor electric vehicles also face some serious disadvantages like shorter range, charging time, few charging stations and price [7]. By solving one or two of the issues as mentioned above it will make electric vehicles more viable. In this proposal we are making quad-motor system that is going to produce regenerative power through generators while the motion of each wheels and storing it in the battery. The main concept behind this project is to improve the range in all-wheel drive electric vehicle by charging itself during the trip of the vehicle and our main goal is to achieve this system in a cost efficient way.
2 Methodology
The key idea of the concept is to improve the range of all-wheel drive electric car with minimum components. To represent the all-wheel drive concept we are going to use four motors for each wheels and the shaft of the each motors are connected to a pulley system which is connected to the generators that is placed in the center of the car each wheel is connected to each separate generators, so we are going to use four separate generators. When the car is in motion with the help of pulley system the generators will produce electricity and charge the battery. In this concept we are using two sets of battery. The battery 1 and battery 2 are connected to the control system of the model. The control system has battery connections, controller system and battery switching systems. The battery 1 is connected to the motors which are installed at each wheel. When these car batteries are fully charged that can facilitate the movement of the car.
Simultaneously with the help of pulley system the generators will powered, which in turn produce electricity. The battery 1 is connected to the motors and battery 2 is charging with the help of generators, when the battery 1 is depleted with the help of switching system the battery 2 will take over the control of motor and battery 1 will be charged by the generators.
The proposed system is simple and cost efficient and if we want to implement this concept in real life car we have choose appropriate parts and components that matches the size of the car. If the manufacturer decides to implement this system according to his car size, he has to choose correct set of batteries, motors and generators.
System Layout and Components

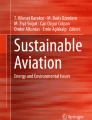
Basic system layout
The above diagram represents the basic representation and gives a understanding about the concept, The A represents the wheel that is going to power the motor like that each wheel got each motors to represent all-wheel drive concept. B represents the wheel of the vehicle then C represents the battery 1 of the vehicle which is connected to the center control system of the vehicle. D represents the control system of the vehicle which consists of vehicle controlling system, charging system for vehicle and switching system for the batteries which are all connected to the control system that placed at the center of the vehicle. E is the pulley system that is connected with the motors that are going to control the vehicles. F is the generators which are connected with the other end of the pulley which is going to power the car in motion. Then the last part G, which is battery 2 that is also connected with the center control system of the vehicles. This is the brief explanation of the parts and their place in the project and their role is clearly represented in this part (Figs. 1 and 2).

Layout of four wheel hub motor drive system
The above diagram will give you a example of how each separate motors will be implemented in a car without our system. This will give how the axle mechanism works in a real life car with separate motors for each wheel. The above image will explain the suspension, front-axle movement and suspension of the car with two set of battery packs.
Block Diagram
Here is the block diagram of the prototype to help you understand the working logic of the prototype. Now we’ll go over the working logic that is involved in the car. On the control system side you have the controller system in which the inputs are passed and the operation is received by the module and with the controller help the data sends to the motor driver which drives the motors. The generator connects with the control system to charge the battery (Fig. 3).

Functional block diagram
3 Components Description
-
1. ARDUINO UNO
For this work we have used ARDUINO UNO ATmega328P programmable microcontroller and have 14 digital input/output pins, 6 analog inputs and reset button. It is placed in the control system of our prototype which has been interfaced with motor driver, Bluetooth module and battery system for our prototype.
-
2. Bluetooth Module
For this work we have used HC-05 Bluetooth module, because it is well enough to perform the operation when combined with ARDUINO, and we can get our results as expected and another reason to use Bluetooth module instead of ARDUINO BLE is the errors can be easily identified in separate models that’s why we are using ARDUINO and Bluetooth module separately. The major advantage of HC-05 modules communication is via serial which makes an easy way to interface with the controller. And it is able to use neither receiving nor transmitting data.
-
3. Motor driver
The motors that we are using is connected with the motor driver. The motor driver is the interface between the motors and the control circuits. It takes low-current signal and then turns it to a higher-current signal which drives the motor.
-
4. Motors
For this work we have used DC motor, DC is nothing but a type of electrical machine that converts electrical energy into mechanical energy. In our projects we are using 12 V dc motor to operate our prototype, so we are going to use four individual motors which are going to power each wheels. To replicate the all-wheel drive concept we are using each separate motor for each wheel.
-
5. Generators
The generator’s function is to change the mechanical energy into electrical energy. The control gear associated with the generator regulates the current output according to the systems specification. Which are installed in the body of the prototype with connection to the motor.
4 Experiment and Analysis
Analisis of Concept
The above proposed system in this chapter is applied in a prototype with each wheel is powered by each separate motors to replicate the concept of all-wheel drive electric car and the each motor shaft is connected to the generators using pulley and at center the controlling system and battery switching system is placed. The prototype is just to understand the concept of the model and analyze the system. The applied motor is DC 12 V with rated current of 410 mA with these information.
Power of motor = V × I
Power of motor = 12 V × 0.410
A = 4.92 W–5 W
According to the above equation and comparing it with our concept, we are using four motors for each wheel. so the total power of motors will be 20 W. in this concept we are using a 24 V battery for our prototype the battery have a capacity of 4.5 Ah
We can calculate the discharge time of the battery connected to the four motors from the following calculation.
Time = (54 W.h)/(20 W)
= 2.7 h = 162 min
From the above calculations we can know about the power created by the motors and power of battery and battery’s discharge time.
Features of the System
The model and design that we have provided above is different by having some key features that will give more advantage to the electric vehicle users, when compared to the current system cars. The system that we have given here is completely different for all-wheel drive electric vehicles. The main feature of our proposal is the simplicity in concept and design, this is achieved here. The concept here will have a great and huge appeal due to its simplicity and design. In this we did not add any new components or any special complicated design, we just made this with available and existing components.
At present, all people have a negative perspective opinion on electric vehicles due to its limited travel range and price. In the current production the electric car which having long range is tesla model 3 with a range of 568 km [11]. But still now experts are claiming that it is not significant enough when compared to its charging time because it takes a long charging time [12]. People don’t want to spend their time in charging the car for hours currently there is lot of new technologies are improvised in self-charging electric vehicles [13], so we focused on implementing a self-charging system for all-wheel drive electric vehicles. Electric cars will able to travel between places and longer distances this will encourage and attract people to use electric cars rather than internal combustion engine cars.
The self-charging system for quad-motor electric vehicle system that we developed in this chapter is capable of achieving these goals. Most of the components and systems are currently used in the normal two-wheel drive electric cars, with only couple of new components and along with simple design. This system can be implemented in the real life quad-motor electric vehicle. By adding this system in the current all-wheel drive electric vehicle the consumers for electric vehicle will increase drastically and this will be a major change for internal and two-wheel drive electric vehicles. By applying this concept in real life production line, many changes will occur in transportation field and main environmental issues like air pollution, global warming, fossil fuel usage will be completely reduced. At present there is not lot of electric charging stations and it faces lot of difficulties in deploying charging stations. The deployment of electric charging stations will need a huge sum, we don’t want to spend this much amount when we have a car that charges itself that is the main concept and features of our system.
5 Result and Discussion
In the above design and calculations we can know the layout of the prototype and some calculations related to the prototype and after the result we came to know the drawback of the proposed system is speed, when the vehicle moves faster it quickly drains the battery. So we have to maintain the speed or limit the speed of the vehicle to a certain level, that is the main drawback of the concept and even though it improves the range the initial charging of the battery in a real life car will take up to 1–2 h that is roughly 120 min and our discharge value is around 162 min which is more time than refueling a internal combustion engine cars. But with proper parts and adaptive design the model that we have proposed here which can be implemented in a real life all-wheel drive electric vehicle that will really improve the range the vehicle during the trip.
6 Future Scope and Conclusion
The future scope for self-charging system improves in a greater phase because people really don’t like to spend much of their time in charging their vehicles, so the only option is to improve the range is by charging the vehicle during it’s trip, by using some new upcoming researches and implementations will give a huge scope and great improvement in self-charging system for all-wheel drive electric vehicles.
In this chapter we have proposed a way to self-charge the all-wheel drive electric vehicle during it’s trip. At present the electric vehicle charging system have lot of issues the current all-wheel drive electric vehicle system will have a huge travel range but it also comes with a lot of issues like price, travel range, and charging time. Through our concept we can eliminate one or two issues that we have mentioned above, if we solve the above problems in future all-wheel drive electric vehicles in future will be more affordable. Our main goal is to keep the design simple and choose cost efficient components to make it work effectively. The concept is applied to a prototype, we can implement this concept in real life all-wheel drive electric vehicles with scalable level of components.
References
Riley: The advantage outweigh the disadvantage of electric vehicles. Autowise, 24 June 2011. https://autowise.com/top-7-disadvantages-of-electric-cars/
Liu, J., Dong, Z., Jin, T., Liu, L.: Recent advance of hybrid energy storage systems for electrified vehicles, pp. 2–6. IEEE (2019)
Ni,Y., Yang, F., Wang, Q., Zhang, H., Zhou, L., Wang, Y.: A review of charging methodologies to improve QoE for electric vehicles, pp. 1–4. IEEE (2020)
Liu, S., Jia, J.: Review of EV’s wireless charging technology, pp. 1–5. IEEE (2019)
DeWeerdt, S.: The key to convincing people to buy electric cars in clean energy, 11 April 2017. https://www.googleadservices.com/pagead/aclk?sa=L&ai=DChcSEwjGtsCysoPzAhUImWYCHY3MDcYABAAGgJzbQ&ae=2&ohost=www.google.com&cid=CAESQeD222tKOpkMPrsXci_1EyrYprNNqDCK7qdrB6q2uniISNN2dJ8OOouCRN5NTrNwVCNbaXvTMBQ3HswYAYnQvf&sig=AOD64_31LwKF0kXBuWvLSNiNYVZmKPDaA&q&nis=1&adurl&ved=2ahUKEwi_zriysoPzAhXsxTgGHV_1CV8Q0Qx6BAgDEAE
Albatayneh, A., Assaf, M.N., Alterman, D., Jardat, M.: Comparison of the overall energy efficiency for internal combustion engine vehicles and electric vehicles, pp. 2–8. IEEE (2019)
Nezamuddin, O.N., Nicholas, C.L., dos Santos, E.C.: The problem of electric vehicle charging: state-of-the-art and an innovative solution, pp. 1–8. IEEE (2019)
Kumar, A., Prasad, L.B.: Issues, challenges and future prospects of electric vehicles: a review, pp. 1–6. IEEE (2018)
Krishnan, S.: How does all-wheel drive electric vehicle car works, 15 August 2018. https://getelectricvehicle.com/awd-electric-cars/
Soni, A., Dharmacharya, D., Pal, A., Srivastava, V.K., Shaw, R.N., Ghosh, A.: Design of a machine learning-based self-driving car. In: Bianchini, M., Simic, M., Ghosh, A., Shaw, R.N. (eds.) Machine Learning for Robotics Applications. SCI, vol. 960, pp. 139–151. Springer, Singapore (2021). https://doi.org/10.1007/978-981-16-0598-7_11
How long does it take to charge a Tesla, 11 November 2021. https://evcharging.enelx.com/eu/about/news/blog/577-how-long-does-it-take-to-charge-a-tesla
Pareek, S., Sujil, A., Ratra, S., Rajesh, K.: Electric vehicle charging station challenges and opportunities: a future perspective. In: ICONC3, pp. 1–6, February 2019
Mandal, S., et al.: Lyft 3D object detection for autonomous vehicles. In: Artificial Intelligence for Future Generation Robotics, pp. 119–136 (2021). https://doi.org/10.1016/B978-0-323-85498-6.00003-4
Biswas, S., Bianchini, M., Shaw, R.N., Ghosh, A.: prediction of traffic movement for autonomous vehicles. In: Bianchini, M., Simic, M., Ghosh, A., Shaw, R.N. (eds.) Machine Learning for Robotics Applications. SCI, vol. 960, pp. 153–168. Springer, Singapore (2021). https://doi.org/10.1007/978-981-16-0598-7_12
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Chandra Mohan, M., Bright Selva Kumaran, A., Rohith, V.S., Sanjay, C., Prathap Reddy, K., Jayashankari, J. (2022). Design and Implementation of a Self-charging System to Improve the Operating Range in Quad-Motor EV. In: Mekhilef, S., Shaw, R.N., Siano, P. (eds) Innovations in Electrical and Electronic Engineering. ICEEE 2022. Lecture Notes in Electrical Engineering, vol 893. Springer, Singapore. https://doi.org/10.1007/978-981-19-1742-4_45
Download citation
DOI: https://doi.org/10.1007/978-981-19-1742-4_45
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-1741-7
Online ISBN: 978-981-19-1742-4
eBook Packages: EnergyEnergy (R0)