
Abstract
The synchronous generator excitation control system is the essential equipment for operation and control of generator and power supply. Conventionally, an excitation system was used exclusively for supplying field current to field coil and be responsible for only steady-state stability. If sufficient synchronizing torque is not provided during the operation, transient instability occurs in the synchronous generator. This can be controlled by using an exciting system with fast response and adequate forcing power. To overcome this issue, digital controllers are to be used. Many researches have been done on utilizing the transient response stabilization of generators. This chapter introduces an approach for tuning PID parameters for controlling the excitation control system. The PID parameters are adjusted using the particle swarm optimization technique.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The essentiality of electrical fuel is growing exponentially and the electricity grid is becoming more tortuous every day [1]. Also, a neoteric power system is facing several issues like, load deregulation, control, and operation of the power system, etc., [2]. These issues fall under the power system stability [3]. The stability of a power system is commonly split into three groups. 1) Steady-state stability 2) Transient stability and 3) Dynamic stability [4]. Several research have been done on steady-state stability [5,6,7,8]. This chapter presents transient stability response in the power system. The transient instability in the power system exhibits because of lightning, system fault and sudden load change [17,18,19]. Under all such transient instability situations, a system voltage drop may occur, causing numerous problems like loss of synchronism, power system oscillations, etc., even leading the unnecessary activity of the generator protection system. It can be prevented by using an excitation system with a quick response and adequate forcing capability. For an excitation system, several forms of voltage control systems have already been suggested in literature. The Proportional, Integral, and Derivative (PID) regulator has some of the commonly accepted voltage regulators. The PID regulator regulates output voltage from the generator and adjusts its output to the perceived terminal voltage of generator.
Several PID tuning methods have been published in literature for the excitation control system. The author of [1] have proposed pole-zero cancellation method. Analytically it seems good but practically exact pole-zero cancellation is not possible. The direct design method [6] also referred to as the pole placement method, which allows the closed-loop poles of an excitation system to be positioned at the location where the anticipated work is attained. Since the zeros can influence the transient retort, a certain amount of trial and error and technical judgment are needed for design. Paper [9] implemented a method of PSO to obtain the PID parameters for the power system stabilizer. Adaptive neuro-fuzzy method of PID tuning is utilized in [10] for the power system stabilizer. The author of [11] presented the H ∝ mixed sensitivity technique for the power system stability. The author of [12] presented the FO-PID-PSS strategy for controller tuning to achieve transient stability. The traditional PID tuning methods may not achieve acceptable transient stability. It is therefore important to implement a new method of PID tuning to achieve appropriate transient stability.
This chapter introduces a different method for auto tuning the PID controller parameter for an excitation system using PSO [13]. Previously, this approach has been used to construct various controllers in the electrical power system [14, 15].
2 Problem Identification
Alternators field coil current is provided through an excitation control system. As the terminal voltage of generator depends on field coil current, the output voltage of a generator can therefore be regulated by controlling an exciter output. Figure 1 demonstrates the extensive block diagram of digital excitation system. The terminal output voltage of the generator is sensed by the potential transformer (PT) and equated to the reference input voltage. This comparison will give an error signal. The control algorithm utilizes this error signal to generate the gate pulses for the bridge rectifier. Bridge rectifier provides the required DC voltage for the exciter field according to the pulses of the gate. The bridge rectifier is supplied either by an external source or directly from the generator terminal. The control algorithm has designed with the help of a PID controller. Pole-zero cancellation method has been used to tune the PID controller automatically. But, in this method, the limit of bridge output voltage is not taken into consideration. Practically, input supply to bridge itself is kept at a level such that output of bridge does not go beyond a limit to ensure that field voltage does not go above ceiling voltage. So, it is essential to consider this limit while deciding PID constants. This chapter suggests the PSO method for tuning PID constants parameters and contrasts its effects with the Pole-zero cancelation method.

Extensive block diagram of digital excitation system
3 Excitation System Modelling
Among several AVR controller design methodologies the PID design method has been effectively utilized in many control system-based industries. The elementary schematic diagram of self-exciting excitation control system with the PID block employed to the AVR control loop is shown in Fig. 2.

Self – excited excitation control system
The transfer function Gc (s) of PID controller block with system loop gain interpreted as follows:
where, KP is the proportionality gain, KI is integrative gain, KD is derivative gain, TD is derivative filter time constant and ‘s’ is the Laplace operator. The PID block is multiplied by the system loop gain KG to accommodate the variation of the system input voltage to the power-converting bridge. The task of evaluating values of the PID controller’s proportional, integral and derivative gains to achieve the desired output and meet design specifications is called controller tuning. Traditionally pole-zero cancellation method and pole placement were introduced. However, the exact cancellation of the pole-zero is not practical, experimentally the parameters estimated by this method are ±20% differ than actual. The method introduced in this chapter for PID tuning is an artificial intelligence based PSO technique. The transfer function G(s) of plant with gain KG is interpreted as following equation:
where TE is an excitation time constant, TG is a generator time constant and Ks is the system gain. Gain KG in the Eq. 1 has used to compensate the variations in gains de pendent on system configuration such as power input voltage and effects of saturation, that means KGKs = 1.
The transfer function of an excitation system is interpreted as:
4 Particle Swarm Optimization (PSO) Technique
PSO technique is used to estimate the PID gains such as KP, KI, and KD in an excitation system. This technique was developed in 1995 by Eberhart and Kennedy [16]. PSO is an evolutionary and stochastic optimization strategy inspired by nature to solve computationally complex or complicated problems of optimization. It really graphs swarm operating processes, such as a swarm of fish. In PSO algorithm, probable particles travel through the constraint solver, following the existing optimum particles. In a constraint solver, every particle keeps record of its locations and tells the finest solution identified for the other particles. This information allows a smart judgement on the next exertion to find the finest possible solution.
In this chapter, the PID parameters KP, KI, and KD are first obtained using the pole-zero cancellation method. These parameters have used to obtain initial random swarm particles. PSO algorithm is initiate with some haphazard particles and then looks for the finest value via the constraint solver, tracking the optimum particles so far located. The model’s step retort (yk) determined for iterations k = 1, 2…, N with initialized particles KP, KI, and KD and compared with the reference step retort (zk). The objective functionality to be considered is the addition of mode of errors amidst zk and yk. The cost function is as follows:
After obtaining three best values that the speed is updated using the following equation:
where, w is inertia weight, A1 and A2 are the acceleration coefficients, vt is the particle speed, xt is the present location of particle, Pbestt and gbestt are the personal best and global best values of particle.
Using the mentioned speed equation, the next position for best value (PID gains KP, KI, and KD) in constraint solver has obtained. The present position can be modified using the following equation:
where, vt is the particle speed.
4.1 Flowchart for Particle Swarm Optimization
See Fig. 3.

Flowchart for particle swarm optimization method
4.2 PSO Algorithm
Step.1: Construct a generator reference voltage retort.
Step.2: Initialize a number of particles (KP, KI, KD) with haphazard places and their corresponding velocities set to zero.
Step.3: Evaluate step retort of the model with selected particle places yk.
Step.4: Compare the generator voltage with reference voltage evaluated in step 1 to generate error.
Step.5: Assess the fitness function of each particular particle using Eq. (4) for selection of Pbestt and gbestt.
Step.6: Determine the finest three values (PID gains KP, KI, and KD) and update the place and speed of the particles with the Eqs. (5) and (6).
Step.7: Verify either the extreme iteration count is reached or not. Without it, go to step (2).
5 Results and Discussion
The PSO technique has been utilized for tuning of the PID parameters. The results attained from this method were equated with the pole-zero cancellation method. The results estimated by the provided method are given in Table 1. For estimation of PID parameters using the proposed method, the generator and exciter time constants (TE, TG) and system gains (Ks, KG) are as under.
TG = 3.4 s;
TE = 0.8 s;
KG = 4; Ks = 0.25;

Step retort of generator using pole-zero cancellation with and without power input limiter
Figure 4 illustrates voltage step response of generator voltage for PID constants calculated from pole-zero cancellation method. It is seen from this figure that if output of PID controller is not limited by a limiter to ceiling voltage, then desired voltage response can be obtained. But, when limiter is used to limit the out-put of PID controller to ceiling voltage, the generator voltage response is quite slow and overshoot of 0.74% is observed.

Combined retort of pole-zero cancellation and PSO with power input limiters

Starting and Step Response of Generator With PSO [X-axis: 1 s/div.; Y-axis: 0.22 pu V/div.]

Response of PSO at Fault [X-axis: 1 s/div.; Y-axis: 0.2 pu V/div.]
The comparison between the step responses of generator voltage for PID values calculated from the PSO and the pole-zero cancellation methods considering the output limiter of PID controller is shown in Fig. 5. It is clearly seen that voltage response for PSO method is very fast compared to that of pole-zero method. In spite of fast response, overshoot in voltage response is lower than pole-zero cancellation method. The generator voltage step response with PSO method indicates 0.36% overshoot and 1.3 s settling up time. This comparison indicates transient stability is improved by the proposed PSO method compared to the conventionally used pole-zero cancellation method.
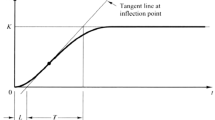
Figure 6 shows the soft starting (0 to 3.4 s) and step response (at 5 s) of the generator by using PSO algorithm. The soft starting is required at the time when generator start from off condition. As shown in the Fig. 6, soft starting of generator exactly follows the theoretical graph. And at the step response the generator takes 0.8 s to reach at desired value. It is better than pole-zero cancellation method.
The response of generator voltage when fault is taking place is shown in Fig. 7. The blue line represents estimated theoretical graph of generator voltage at fault condition. The fault is taking place at time interval 5 to 5.2 s. The PSO algorithm response for this fault is given with red line. It shows that at the fault condition if Excitation system is not present, the generator voltage has to decrease up to 0.8 pu voltages. And it is not permissible in power system to reduce that much voltages suddenly. It can be cause of system voltage collapse. So, by using PSO technique we can overcome this problem (2%) as shown in Fig. 7.
6 Conclusion
Transient instability in power system occurs because of lightning, system fault and sudden load change. The transient stability of synchronous machine depends on excitation controller. In this chapter, the PSO technique has been utilized to calculate values of PID constants of excitation controller. A comparative analysis has been shown between response of PID controller with PSO and pole-zero cancellation method. After evaluating the results achieved by the proposed approach, it can be concluded that the PSO method gives better response during transient condition compared to the conventionally used method of pole-zero cancellation. Moreover, the settling time and overshoot is decreases by the suggested solution.
References
Das, T.K., Venayagamoorthy, D.: Optimal design of power system stabilizers using a small population based PSO. In: 2006 IEEE Power Engineering Society General Meeting, 7p (2006)
Larson, E.V., Swan, D.A.: Applying power system stabilizers-parts I-III. IEEE Trans. PAS 100, 3017–3046 (1981)
Demello, F.P., Concordia, C.: Concepts of synchronous machine stability as affected by excitation control. IEEE Trans. Power Appar. Syst. 88, 316–329 (1969)
Kundur, P., Balu, N.J., Lauby, M.G.: Power System Stability and Control, vol. 7. McGraw-hill, New York (1994)
Godhwani, A., Basler, M.J.: A digital excitation control system for use on brushless excited synchronous generators. IEEE Trans. Energy Convers. 11, 616–620 (1996)
Kim, K., Rao, P., Burnworth, J.A.: Self-tuning of the PID controller for a digital excitation control system. IEEE Trans. Ind. Appl. 46, 1518–1524 (2010)
Kim, K., Schaefer, R.C.: Tuning a PID controller for a digital excitation control system. In: Conference Record of 2004 Annual Pulp and Paper Industry Technical Conference (IEEE Cat. No. 04CH37523) (2004)
Raut, K.H., Vaishnav, S.R.: A study on performance of different PID tuning techniques. In: Proceedings of the International Conference on Electrical Engineering and Computer Science. Trivandrum, India (2012)
Jagadeesh, P., Veerraju, M.S.: Particle swarm optimization based power system stabilizer for SMIB system. In: International Conference on Emerging Trends in Engineering Technology and Science (2016)
Ramirez-Gonzalez, M., Malik, O.P.: Power system stabilizer design using an online adaptive neurofuzzy controller with adaptive input link weights. EEE Trans. Energy Conver. 23, 914–922 (2008)
Sil, A., Gangopadhyay, T.K., Paul, S., Maitra, A.K.: Design of robust power system stabilizer using h mixed sensitivity technique. In: 2009 International Conference on Power Systems (2009)
Belkhier, Y., Achour, A., Shaw, R.N., Sahraoui, W., Ghosh, A.: Adaptive linear feedback energy-based backstepping and PID control strategy for PMSG driven by a grid-connected wind turbine. In: Mekhilef, S., Favorskaya, M., Pandey, R.K., Shaw, R.N. (eds.) Innovations in Electrical and Electronic Engineering. LNEE, vol. 756, pp. 177–189. Springer, Singapore (2021). https://doi.org/10.1007/978-981-16-0749-3_13
Pillay, N., Govender, P.: A particle swarm optimization approach for model independent tuning of PID control loops. In: AFRICON 2007 (2007)
Gaing, Z.L.: A particle swarm optimization approach for optimum design of PID controller in AVR system. IEEE Trans. Energy Convers. 19, 384–391 (2004)
Kim, K., Rao, P., Burnworth, J.: Application of swarm intelligence to a digital excitation control system. In: IEEE Swarm Intelligence Symposium, pp. 1–8 (2008)
Kennedy, J., Eberhart, R.: Particle swarm optimization. In: Proceedings of the IEEE International Conference on Neural Networks, vol. 4, 1942–1948 (1995). http://dx.doi.org/10.1109/ICNN.1995.488968
Mir, A.S., Senroy, N.: Self-tuning neural predictive control scheme for ultrabattery to emulate a virtual synchronous machine in autonomous power systems. IEEE Trans. Neural Networks Learn. Syst. 31(1), 136–147 (2019)
Kanojia, S.P., Chandrakar, V.K.: Damping of Power System Oscillations by using coordinated tuning of POD and PSS with STATCOM. In: International Conference on power system Engineering. (ICPSE), Organized by World Congress on Science, Engineering and Technology, WCSET. Penang, Malaysia, 25–27 Feb 2009
Rajyaguru, S., Kanojia, S.S.: Reactive power compensation for LV distribution network. Int. J. Innov. Technol. Explor. Eng. (ISSN: 2278-3075) 8(6), 1734–1741 (2019)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Solanki, S.K., Kanojia, S.S., Godwal, S., Nimje, A., Patel, V. (2022). Particle Swarm Optimization Based Self-tuned PID Controller for Digital Excitation Control System. In: Mekhilef, S., Shaw, R.N., Siano, P. (eds) Innovations in Electrical and Electronic Engineering. ICEEE 2022. Lecture Notes in Electrical Engineering, vol 893. Springer, Singapore. https://doi.org/10.1007/978-981-19-1742-4_21
Download citation
DOI: https://doi.org/10.1007/978-981-19-1742-4_21
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-1741-7
Online ISBN: 978-981-19-1742-4
eBook Packages: EnergyEnergy (R0)