
Abstract
In this paper, a novel fuzzy logic-controlled Vienna rectifier to extract maximum power at variable wind speed is proposed. Vienna rectifier consists of three switches and four diodes with an input inductor and performs both AC/DC and DC/DC conversions in a single stage. A permanent magnet synchronous generator (PMSG) coupled with wind turbine system is used in this paper. The tracking of the maximum power is a real challenge in wind energy systems. In this paper, the variable speed of the wind turbine generator system and the power output of the permanent magnet synchronous generator are chosen as inputs to the fuzzy logic controller to track the maximum power according to the change in wind speed by following 27 set of rules formulated in the fuzzy rule base. The pulse width modulated signals from the fuzzy logic controller initiate the three switches in the Vienna rectifier. The proposed control scheme not only tracks the maximum power from the wind but also enhances the input DC voltage, ensures sinusoidal nature at input mains and balances the voltage across the two capacitors. The Vienna rectifier is interfaced to the grid through space vector pulse width modulated voltage source inverter. The MATLAB/Simulink environment is utilized in order to observe the optimum performance of the system. The proposed control algorithm is experimentally validated using a real-time simulator OPAL RT 4200. The experimental results are in agreement with simulation results and prove the robustness of the control scheme.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Boost-type rectifier
- Fuzzy logic controller
- 6 Maximum power point tracking
- Variable speed wind energy system
- Vienna rectifier
1 Introduction
According to renewable global status report 2018 update REN21 (2018), a noticeable interest in the utilization of wind energy sources has been increased in the renewable markets due to remarkable and administrator changes in policies, which have driven many industries to take up this privilege before the favourable schemes expires, a swift decrease in wind power price in both onshore and offshore, clean and many environmental benefits. According to status report, an increase of 11% from the previous year (2016) has been noticed (an increase of 52 GW), and at present (2017), the total capacity of wind power all around the world is risen to 539 GW. In the early stage of wind power generation, a fixed speed wind turbines was used and the generated wind power is directly integrated to the grid. There arose a lot of issues like less energy conversion efficiency (wind turbine extracts energy at a single speed, and in other speed, it remains inactive), sub-synchronous oscillations between generator and turbine shaft, huge mechanical stress, etc. According to [1], a multi-stage geared squirrel cage induction generator (SCIG) was used as a generator for fixed speed wind turbines. A soft starter which is composed of power electronic switches was implemented in order to mitigate high in-rush currents at the initiation of the system, and the wind energy system requires no power electronic converter under normal operation [2]. At the end of 1990s, the technology has driven towards variable speed wind energy conversion systems due to its dominant merits over fixed speed wind energy systems. The enhanced efficiency of energy conversion, a lower stress on the mechanical parts, lower maintenance and extended life cycle due to less failures in gear box and as well as in bearing, less noise and accepted quality of power made the technological world to pursue after variable speed wind energy systems. The entire history and present trends of variable speed wind energy conversion system have been explained clearly in [3]. At the early stages of variable speed wind energy technology, a wound round induction generator (WRIG) with rotor resistance control has implemented to achieve partial variable speed operation of wind energy system as the manipulations in rotor resistance reflect on torque and speed of the generator. The power electronic switches provided the necessary control to change the value of external rotor resistance. This setup can be implemented for limited speed range (approximately 10% more the synchronous speed), and this system suffers from resistive losses. Later, doubly fed Induction generator (DFIG) with the same above-mentioned configuration except the replacement of external rotor resistance by grid connected power electronic converter with no soft starter was proposed [4]. The power electronic converter which was implemented at the rotor circuit has to undertake only 30% of rated generator power. The enhanced power conversion efficiency, amplified speed range (approximately 30%) and improved dynamic performance are the advantages of the DFIG-based wind energy system. Direct-driven wind turbine generator system (gearless mechanism) has become a new alternative for the designers and manufacturers to overcome the gear mechanism failures and to ensure low maintenance. The drawbacks prevailed in DFIG-based wind energy became auspicious situations for direct-driven wind energy systems. The dissipation of excessive heat in the gear system and wear due to friction, the requirement of oil for free movement of gears, noise pollution, unable to meet the entire reactive power requirement of the grid, disturbances in the generator system during grid fault conditions like transients in stator currents can be considered as drawbacks of DFIG-based wind energy system [5]. During the early days of direct-driven wind energy system technology, electrically excited wound round synchronous generator (WRSG) has extensively used as wind turbine generator [1, 5]. The main stumbling block of the emerging direct-driven technology is the requirement of large torque. Since the size of the machine being determined by the rating of torque required, low-speed large torque direct-driven technologies has a bulky structure which is so many times (approximately 60%) bigger than wind energy system with geared technology. This impediment can be repressed by utilizing permanent magnets for excitation in synchronous generator [4, 5]. The detailed explanation of different types of generator used in fixed and variable speed wind turbines (with gear and direct driven) can be seen in [6, 7]. In this paper, a direct-driven (gear less) wind turbine with permanent magnet synchronous generator is used as a wind turbine generator system. The organization of the paper is as follows: Sect. 2 consists of basic features of wind turbine system which consists of constructional features and mathematical modelling of wind turbine generator system. The operating principle of PMS-based wind energy system is explained in Sect. 2. The basic operation of Vienna rectifier is explained in Sects. 3 and 4. The detailed explanation of maximum power point tracking (MPPT) algorithms is explained in Sect. 5 and proposed, fuzzy logic control algorithm (FLC) is explained in Sect. 6. The results and discussion is explained in Sect. 7. Finally, Sect. 8 consists of conclusion and is followed by acknowledgement and references.
2 Basic Principle of Wind Energy Conversion System
The wind energy conversion system converts the amount of available kinetic energy in the wind to usable electrical energy. The major parts in direct-driven wind turbine-generator system consists of blades mounted on the hub, shaft (for direct-driven gear mechanism is not required) and permanent magnet synchronous generator (PMSG). The kinetic energy per unit time of an undisturbed wind when passing through the area of cross-sectional turbine A, having the velocity \({\text{ V}}_{0}\) (undisturbed wind) and density of the air as \(\rho\) is given as
According to theory of linear momentum and principle of Bernoulli, the amount of power extracted by wind turbine or the mechanical power output can be given as [8]
The pitch angle control had no dominion in controlling the wind turbine during the speeds between cut-in and rated, so it can be zero.
The tip speed ratio (\(\lambda\)) is defined as ratio of speed of the tip of blade to speed of the wind,
According to (2), the mechanical power (PT) is directly proportional to coefficient of power (Cp). So, the maximum power drawn from the turbine (PT, max) depends on maximum value of power coefficient (Cp, max). The coefficient of power Cp depends on angle of pitch blades and tip speed ratio (λ, γ). The maximum value of coefficient of power (Cp, max) occurs at certain value of tip speed ratio (λ), and this corresponding tip speed ratio is constant for a turbine blade. The conventional block diagram representation of grid-connected wind energy conversion system is shown in Fig. 1.

complete representation of conventional Grid-connected wind energy system
2.1 Mathematical Modelling of Permanent Magnet Synchronous Generator (PMSG)
In this paper, a non-salient or surface pole-mounted permanent magnet generator is used as a wind generator due to its less cost of construction and equal distribution of air gap. In this paper, the synchronous generator is modelled in rotor frame of reference due to its simplicity in framing the equations. Since the PMSG consists of permanent magnets, the rotor field current can be modelled as a current source (Is) with a fixed magnitude. The equations of voltage for permanent magnet synchronous generator according to [2], are given as follow:
The electromagnetic torque (Te) developed by the PMSG is given as
Since the system considered here is non-salient machine, so Lds = Lqs, and hence, the development of electromagnetic torque purely lies on Iqs.
3 Operating Principle of Three-Phase/Three-Level/Three-Switch Vienna Rectifier
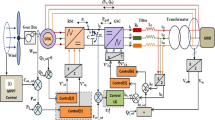
Though the diode bridge rectifier which act as grid side converter in Fig. 1. has the merits like cost-effective and reliable, it undergoes a few drawbacks like introducing harmonics into the mains current, lack of dominant power factor control, torque ripples which reduces the efficiency. In order to address this issues, researchers worked out, and after many transformations in the actual circuit, Vienna rectifier was proposed [9]. The different modes of transformation of circuitry have been clearly explained in [10]. Vienna rectifier is an AC/DC/AC converter device which can convert alternating quantity (AC) to direct quantity (DC) and at the same time which can boost the input DC voltage to the desired DC voltage level. Vienna rectifier consists of three switches, one for each phase, and it generates three voltage levels, namely Vdc, 0 and −Vdc. Simplified control, less cost, less harmonic distortion, reduced voltage blocking stress on power semiconductor switches, unity power factor operation, reliable and efficient are the merits of the Vienna rectifier [9, 10]. The proposed topology of Vienna rectifier along with fuzzy logic-controlled maximum power tracking algorithm is shown in Fig. 2. The operation of Vienna rectifier in all states (000–111) and its operation as boost rectifier are clearly explained in [9,10,11].

Proposed fuzzy logic-controlled MPPT Vienna rectifier for a grid-connected wind energy system
4 Maximum Power Point Tracking Techniques in Wind Energy Systems
Since the availability of wind is patchy and random, the expeditious tracking of peak power point is indispensable for wind energy conversion systems. Once the static friction has been overcome by the rotor, it starts to rotate and achieves a possible stable zone. If the load torque increases simultaneously with the speed of the rotor, the rotor operates in the stall region and accelerates to a feasible speed of operation though the possible highest wind speed is achieved. The energy extracted in this condition is significantly low as a result of stalled operation of rotor. In other case, if the increase of load torque is sluggish with the speed of the rotor, then the rotor rotates with speed more than the operating speed and the result is poor extraction of optimum energy from the wind. Hence, the system has to be operated somewhere between these two loading limits so as to obtain an optimum rotational speed to transfer maximum power from the wind. The characteristics of mechanical power against the rotor rotational speed shown in Fig. 3, and Eq. (2) explains that for every speed of the wind the maximum power of a wind turbine depends on maximum coefficient of power (Cp, max), and this maximum coefficient of power occurs only at one value of tip speed ratio (λ = λoptimum) which is optimum. So, if the rotor of the wind turbine is operated at λoptimum, whatever may be the speed of the wind, there is a possibility of extracting peak power [12, 13].

Mechanical output power versus speed of the turbine
Basically, the MPPT techniques which are wide spread from the past are tip speed ratio control [13], power signal feedback control [12], optimal torque control [14] and hill climbing search control [15], advanced hill climbing search method [16] where a lookup table is implemented for hill climbing search method, and several different kinds of optimal power tracking methods are explained in [17]. Most of the MPPT methods described above has implemented proportional–integral–derivative (PID) controller to extract maximum power out of wind energy. In [18], for controlling the speed, a PID tuner has been implemented. In [19], in order to extract the optimum power, a simple V/Hz control method was proposed. In [20], it was declared that the comparative analysis of PID controller and V/Hz controller was done and it was proven that classic controllers like V/Hz controller can provide better performance over PID controllers. The main drawbacks of conventional PID controllers is a laborious process of tuning the parameters for swift and desired dynamic response, operational amplifiers (op-amps), which are used in the implementation of PID tuners and which have the negative effects, like ageing and temperature dependency and the system performance can be debased [21]. A new control scheme based on sentences in a simple language and simple if–then rules which is different from conventional control schemes and user-friendly was proposed in Zadeh in 1973 [22]. The merits of fuzzy logic controllers are, a rigorous mathematical modelling is not essential, easy to execute, endurable performance of the system as it is independent on ageing and atmospheric conditions. So, in this paper a fuzzy logic based MPPT algorithm has been implemented to acquire the above-mentioned benefits. According to Zadeh [22], fuzzy logic controller schemes is a three-step process: (i) the inputs have to be expressed in linguistic variables based on fuzzy set theory which is called fuzzification, (ii) the conditional statements based relation between linguistic variables, and (iii) conversion of rule-based fuzzy logic linguistic variables with member functions into analogue signal which is called defuzzification. When there is change in wind speed, the rotor of generator has to track it for extraction of the optimum power, and this control scheme is executed by fuzzy logic controller (FLC).
5 Proposed Controller Scheme
In this paper, a FLC controller is considered to track the maximum power. The FLC operates as a fundamental block to generate necessary control signal to balance voltage across the capacitors for Vienna rectifier. The sinusoidal current nature of input current mains also depends on the FLC signal. The inputs considered for the FLC are output power of PMSG and speed of the rotor of generator. As the unknown value of wind speed changes, FLC changes the speed of the rotor of generator and increments the power of the PMSG. If the change in power is positive, the peak power is in the right side and again FLC increases the speed of the rotor of generator. If the change in the power of the PMSG is negative, then maximum power is towards the left side and the FLC decreases the speed. This process continues until the maximum power is reached. The surface viewer of FLC is shown in Fig. 4.

Surface viewer of FLC
The rules for FLC are shown in Table 1. The variable N + + shows negative very big, NB shows negative big, NM shows negative medium, NS shows negative small, ZZ shows zero, PS shows positive small, PM shows positive medium, PB shows positive big, and P + + shows positive very big.
The speed signal generated by FLC at maximum power point is considered as a reference speed signal. The reference speed signal is compared with actual speed of the permanent magnet synchronous generator (PMSG,) and the difference is fed through a well-tuned proportional plus integral) (PI) tuner [23, 24]. The PI tuner generates the required torque reference. The reference torque is compared with the calculated torque according to (6) to generate a reference quadrature current, where reference quadrature current (iq,ref) is given as
By using parks transformation, \({\text{i}}_{{{\text{q}},{\text{ ref}}}}\) and \({\text{i}}_{{{\text{d}},{\text{ ref}}}}\)(=0) are converted into ia, ib, ic. The ia, ib, ic signals are added with capacitor voltage balance signal generated by a voltage balance controller of Vienna rectifier. The voltage balance controller consists of half of the total voltage across the capacitor (Vtotal) and voltage across capacitor C2, as shown in Fig. 2. The difference between these two quantities is tuned by a PI regulator, which generates reference waveforms for pulse generation. The reference waveform is compared with triangular carrier to generate necessary pulse width modulation signal.
6 Experimental Validation
The entire simulation work is validated by a real-time simulator OPAL RT. The real-time simulator used in this paper is OP 4200. The OP 4200 is one of the OPAL-RT real-time simulators. It consists of a system on chip combining an ARM CPU and a KintexTM-7 FPGA. It is also equipped with signal conditioning for 128 input–output lines. This design provides four signal-conditioning cassettes. Op4200 contains PentaLinux version 4.0.0 Xilinx operating system with a CPU speed of 1 GHz. It requires a DC supply of 24 V, and it can generate an output signal of + /−16 V. The real-time setup to validate the simulation result is presented in Fig. 6. The real-time setup consists of a PC with installed RT-LAB software, a real-time simulator OP4200, DSO and power analyzer and connected wires to capture the required results (Fig. 5).

Real-time simulator OP4200

Rreal-time setup with host PC and OP4200
7 Results and Discussion
The system is simulated using MATLAB/Simulink software. The rotor speed of PMSG at variable wind speeds is shown in Fig. 7. According to change in wind speed, the rotor speed also changes. As per change in the rotor speed, the output power of PMSG also changes and is represented in Fig. 8. The FLC tracks the peak power and varies the rotor speed at each wind speed. The Vienna rectifier increases the sine nature of the input AC current. The change in wind speed is reflected on the Vienna rectifier input current and is represented in Fig. 9. The voltage balance control balances the voltage across the capacitors. As a result, the voltage stress across each switch is decreased by a factor of 2. The voltage across each capacitor is shown in Figs. 10 and 11. The total DC link voltage which is an input to inverter is represented in Fig. 12. The Vienna rectifier generates a three-level voltage and is shown in Fig. 13. In order to validate the simulation results, the entire system is operated using OP4200. The change in rotor speed according to change in wind speed in real-time environment is presented in Fig. 14. The actual wind speed is scaled to + /−16 V in OP4200 while configuring the input and outputs. The PMSG output power result using OP4200 is shown in Fig. 15. The mains current waveform should be in sinusoidal when Vienna rectifier is used. The sinusoidal nature of input current mains is shown in Fig. 16. The comparative analysis of input current waveform with and without Vienna rectifier is shown in Fig. 17. The current waveform without Vienna rectifier consists of dominant harmonics and is evident from Fig. 17. Vienna rectifier consists three-level line-line voltages. The representation of DC link voltage and three-level voltage is shown in Fig. 18. The inverter voltage and currents using OP4200 are shown in Figs. 19 and 20. Figure 21 represents the power flow from the source to grid. The capacitor voltages, DC link voltage and Vienna rectifier current are shown in Fig. 22.

PMSG rotor speed versus time

PMSG voltage versus time

Input current of Vienna versus time

Voltage across the capacitor C1 versus time

Voltage across the capacitor C2 versus time

Voltage across the capacitors (DC link voltage) versus time

Three-level voltage of Vienna rectifier versus time

Input current of Vienna versus time

PMSG output power versus time

Input current of Vienna versus time

Input current with and without Vienna versus time

Dc link voltage and three-level voltage versus time

Inverter output voltage versus time

Inverter output current versus time

Voltage and current of Vienna versus time

Vc1, Vc2, Vdc link, Vienna input current versus time
8 Conclusion
In this work, a new controller for wind energy system to ensure power quality and to track peak power is proposed. The controller consists of an adaptive fuzzy logic controller to track maximum power and a DC voltage regulator to assure balance voltage across the DC link terminals. The controller is proved to be robust enough to track the maximum power at variable wind speeds. A balanced voltage control which reduces the voltage stress across the power electronic switches is proposed, and the real-time simulator results prove its optimum performance at variable wind speeds. An improved power quality at the input mains can be seen from the real-time results which are an evident of optimum performance of the proposed control scheme.
References
Polinder H, Van der Pijl FF, De Vilder GJ, Tavner PJ (2006) Comparison of direct-drive and geared generator concepts for wind turbines. IEEE Trans Energ Conver 21:725–732
Wu B, Lang Y, Zargari N, Kouro S (2011) Power conversion and control of wind energy systems, John Wiley & Sons, Inc., Hoboken, New Jersey
Carlin PW, Laxson AS, Muljadi EB (2001) The history and state of the art of variable-speed wind turbine technology, Technical report. National Renewable Energy Laboratory (NREL), Colorado
Pena R, Clare JC, Asher GM (1996) Doubly fed induction generator uising back-to-back PWM converters and its application to variablespeed wind-energy generation. IEE Proc Electr Power Appl 143:231–241
Dubois MR (2004) Optimized permanent magnet topologies for direct driven wind turbines, Ph.D. dissertation, The Netherlands
Hansen LH, Madsen PH, Blaabjerg F, Christensen HC, Lindhard U, Eskildsen KA (2001) Generators and power electronics technology for wind turbines. In: 2001 27th annual conference of the IEEE industrial electronics society, 2000–2005.
Blaabjerg F, Ma K (2017) Wind energy systems. Proc IEEE 105:2116–2131
Twidell J (2006) Tony weir renewable energy sources, 2nd edn. Taylor & Francis group
Kolar JW, Zach FC (1997) A novel three-phase utility interface minimizing line current harmonics of high power telecommunication rectifier modules. IEEE Trans Ind Electron 44:456–467
Nannam HC, Banerjee A (2018) A detailed modeling and comparative analysis of hysteresis current controlled vienna rectifier and space vector pulse width modulated Vienna rectifier in mitigating the harmonic distortion on the input mains. IEEE Int Conf Industr Eng Eng Manage (IEEM) 2018:371–375
Nannam HC, Misra P, Banerjee A (2018) Harmonic analysis of state vector pulse width modulated Vienna rectifier. In: 2018 2nd international conference on power, energy and environment: towards smart technology (ICEPE), pp 1–6
Buehring IK, Freris LL (1981) Control policies for wind energy conversion systems, 128:253–261
Koutroulis E, Kalaitzakis K (2006) Design of a maximum power tracking system for wind energy conversion applications. IEEE Trans Ind Electron 53:486–494
Morimoto S, Nakayama H, Sanada M, Takeda Y (2005) Sensorless output maximization control for variable speed wind generation system using IPMSG. IEEE Trans Industr Appl 41:60–67
Datta R, Ranganathan VT (2003) A method of tracking the peak power points for a variable speed wind energy conversion system 18: 163-168
Wang Q, Chang L (2004) An intelligent maximum power extraction algorithm for inverter based variable speed wind turbine system. IEEE Trans Power Electron 19:1242–1249
Kazmi SM, Goto H, Guo HJ, Ichinokura O (2010) Review and critical anlysis of the research papers published till date on maximum power point tracking in wind energy conversion systems. IEEE Energ Convers Congr Exposition, 4075–4082
McIver A, Holmes DG, Freere P (1996) Optimal control of a variable speed wind energy turbine under dynamic wind conditions. In: 1996 IEEE industry applications conference thirty first IAS annual meeting, 1692–1698
Zinger DS, Muljadi E, Miller A (1996) A simple control scheme for variable speed wind turbine. In: 1996 IEEE industry applications conference thirty first IAS annual meeting, 1613–1618
Chedid R, Mrad F, Basma M (1999) Intelligent control of a class of wind energy conversion systems. IEEE Trans Energy Convers 14:1597–1604
Hilloowala RM, Sharaf AM (1996) A rule based fuzzy logic controller for a PWM inverter in a standalone wind energy conversion scheme. IEEE Trans Ind Appl 32:57–65
Zadeh LA (1973) Outline of a new approach to the analysis of complex system and decision process. IEEE Trans Syst Man Cybern 3:28–44
Nannam HC, Banerjee A, Guerrero JM (2021) Analysis of an interleaved control scheme employed in split source inverter based grid-tied photovoltaic systems. IET Renew Power Gener 15:1301–1314
Nannam HC, Banerjee A (2021) A novel control technique for a single-phase grid-tied inverter to extract peak power from PV-Based home energy systems. AIMS Energy 9:414–445
Acknowledgements
The author’s want to thank DST-SERB, statutory body established through an act of parliament: SERB Act 2008, the Government of India, for their financial assistance for the undergoing project under project reference no. SERB—SB/S3/EECE/090/2016 and also the management of NIT Meghalaya (An Institute of National Importance) for their constant support to carry out the work.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this chapter

Cite this chapter
Nannam, H.C., Banerjee, A. (2023). A Novel Fuzzy Logic-Controlled Vienna Rectifier to Extract Maximum Power in the Grid-Connected Wind Energy System Applications. In: Edwin Geo, V., Aloui, F. (eds) Energy and Exergy for Sustainable and Clean Environment, Volume 2. Green Energy and Technology. Springer, Singapore. https://doi.org/10.1007/978-981-16-8274-2_1
Download citation
DOI: https://doi.org/10.1007/978-981-16-8274-2_1
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-8273-5
Online ISBN: 978-981-16-8274-2
eBook Packages: EnergyEnergy (R0)