
Abstract
Wide area measurement systems (WAMS) based fault detection and protection techniques are gaining more importance with the increase in the number of phasor measurement units (PMUs) installed in the transmission network. PMUs help to attain a more accurate situational awareness of the power system. WAMS-based techniques have made the real-time monitoring and control of the power system possible and thereby help to avoid unnecessary collapse and blackouts of the system. PMUs located at the substations are able to send the time-stamped phasor information of the voltages and currents at a rate of one sample per cycle to a phasor data concentrator (PDC) located at a central control center. Suitable algorithms can be developed to analyze the situation and to make appropriate decisions for the protection of the system by processing the data. This paper presents a comprehensive analysis of transmission line protection schemes using WAMS-based data and compares the fault location techniques developed using WAMS-based data from the purview of series compensated lines.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Wide area measurement system
- Phasor measurement unit
- Phasor data concentrators
- FACTS
- Transmission line protection
- Compensated lines
1 Introduction
Transmission line fault detection and fault identification are major areas of research due to the ever-increasing need for electric power and the remote location of power generating stations from the major consumer centers. It is necessary to have a high speed, reliable, secure and dependable protection scheme of the transmission lines against the possible faults to ensure a reliable power supply. Today, the transmission system uses different compensating devices to improve the flexibility and efficiency of power transmission. Parallel transmission lines are also commonly used to increase the economy. But all these introduce complex problems in the protection of the transmission lines by increasing the difficulty in fault detection and location.
Protection schemes employing electromechanical protective relays working on the conventional relaying principles (over current relay, differential relay, directional relays distance relay, power line carrier protection, etc.) were commonly implemented in the power system. As time progressed, microprocessor-based digital relays have become common as they can integrate a number of different protection functions in one unit and can incorporate communication and intelligent decision-making capabilities in it. With the advent of phasor measurement units, wide area monitoring, protection and control [1,2,3,4] has become possible and protection schemes based on wide-area measurements have been developed and being tested and implemented.
Several transmission line protection algorithms have been developed by various researchers utilizing different techniques for relaying applications. Traveling wave-based [5,6,7,8] and transient-component-based fault detection schemes need higher sampling rates for the capture of details in the signals. Protection algorithms for multiterminal and double circuit lines should be carefully developed to include all the details pertaining to the effects of their configuration which may affect the accuracy of the algorithm [9,10,11]. In differential current-based techniques [12, 13] time synchronization of data plays an important role. Compared to the protection algorithms for uncompensated lines [14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34], algorithms for the compensated line [35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53] requires special care to consider the effect of operating modes of compensating device.
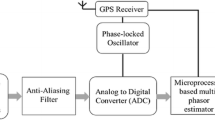
WAMS-based protection algorithms have the advantage of the availability of time synchronized data from other locations of the system and improved reliability. Phasor measurement units (PMU) located at different substations and generating stations (Fig. 1) are the heart of WAMS. These intelligent devices can capture the voltage and current information from the site, convert it to phasor form and time stamp the phasors with the help of a GPS clock. PMUs are able to communicate with phasor data concentrators (PDC) located at a regional control station. PDCs at different regional control stations can communicate with a super PDC located at a higher level control station to realize wide-area monitoring protection and control. Time-stamped phasors obtained at the central control station can be processed to make protective decisions.

Wide-area measurement system [4]
This paper presents a comparative study of WAMS-based transmission line protection techniques available in the literature and is organized in the following manner. The necessity of WAMS-based protection methods is explained in Section II. In Section III, the different classification of fault detection techniques is discussed. In Sections IV and V, WAMS-based protection techniques of uncompensated and compensated transmission lines in the literature are reviewed. Section VI is the comparative study of protection algorithms in [44, 45] developed for series compensated lines and section VII is the conclusion.
2 Necessity of WAMS-Based Protection Schemes
Transmission lines carry the power generated in remote generating stations to the load centers through long distances in the order of several kilometers. As all the high-power transmission lines are overhead lines, they are prone to be faulty due to lightning, storm, and other natural disasters. The faults may also be caused by aging of the lines, overloading for a long time, or human errors in erecting the line. If the faults persist in the line unattended, it may lead to cascaded tripping of the entire generation and transmission systems and may lead to the damage of the power system components. To prevent economic losses and to ensure stable, reliable, and secure operation of the power system, it is essential to have a fast, reliable, and efficient protection system, which has the ability to discriminate different types of faulty and stressed conditions of the transmission lines and initiate correct protective measures as fast as possible.
The transmission line faults are classified broadly as symmetrical faults and unsymmetrical faults. Symmetrical faults are three-phase faults in which all the three phases are simultaneously short-circuited. This type of fault is very rare (<5%) but, if occurs, it is very severe and critical. It includes L-L-L and L-L-L-G faults.Asymmetrical faults are faults in which all three phases are not involved simultaneously. This type of fault includes L-G, L-L-G, and L-L, the most common being L-G (70–80%). When a fault occurs, high currents flow in lines, causing large voltage drops in lines involved and large voltage dips at fault points. The faults initiate voltage and current transients and surges in the power system. These large currents and transients may cause the failure of power system equipment and affect the stability of the system. Conventional protection schemes use distance relays and over-current relays for the transmission line fault detection.
With the increasing power demand, the number of double circuit lines and FACTS controllers are being increased in the system to enhance the economy and flexibility of power transmission. But the presence of FACTS devices and double circuit lines makes protection a more complex issue with the existing protection schemes. To improve the reliability and accuracy of the fault detection, classification, and location, in the presence of new control devices and transmission schemes, the development of WAMS-based protection schemes is an effective solution.
3 Classification of Fault Detection Techniques
The fault detection techniques available in the literature can be classified as shown in Fig. 2. The classification is based on the requirement of information from line ends, type of information required, tool used for fault detection, and type of transmission line.

Classification of fault detection techniques
3.1 Based on the Requirement of Information from Line Ends
Single-end methods: In single-end method, information from only one end is used for fault detection and classification. The information used may be the change in voltage, current, impedance, frequency components, or maybe traveling wave phenomenon. Using suitable techniques, the occurrence of a fault can be identified and necessary protective actions may be initiated. Over voltage, over current, and distance protection schemes are usually implemented using single end information only.
Double/multi-end methods: In the double end or multi-end method, information from both/all terminals of the line is utilized for fault detection and classification. Usually, the differential relay principle is used in this method. A communication channel is required in this case to compare the information from different locations. But it is critical to ensure that the information being processed is time synchronized and measurement errors are suitably dealt with.
WAMS-based methods: Wide area measurement based protection schemes use time-stamped information measured using phasor measurement units located at different locations in a power system. Usually, the time-stamped information from different PMUs received at a phasor data concentrator located at a central control station, and processed to generate a clear picture of the power system operation and/or to produce control signals accordingly. The development of phasor measurement units has provided an opportunity of getting the time-synchronized view of the operating conditions of the wide-area power system and to develop more reliable and secure protection schemes.
3.2 Based on the Type Information Required
Power frequency component based methods: Fault causes variation in magnitude and/or phase angle of voltage, current, and impedance measured at relay location. This information can be utilized for fault detection, classification, and location.
Most of the works combine both magnitude- and angle-based information for fault analysis.
Transient frequency components based methods: In this method, fault-generated transient frequency components are utilized for fault detection and classification.
Traveling wave based methods: In this method, traveling wave properties of fault generated transients are utilized for fault detection. Fast and accurate fault detection and location are possible by this method. But requires a high sampling frequency.
3.3 Based on the Tool Used for Fault Detection and Classification
Mathematical model based methods: Many of the fault analysis algorithms are based on the mathematical model of the transmission system to be protected. For the protection scheme to be efficient, the system parameters and characteristics are to be accurately modeled.
Frequency transform based methods: Various frequency transforms are available to detect the frequency contents in the fault-generated transients. By analyzing the frequency contents of the voltage and current waves in the transmission line, faults can be detected and identified. The frequency transforms like Discrete Fourier Transform (DFT), Discrete Wavelet Transform (DWT), Fast discrete S Transform (FDST), etc., can be used for the frequency detection.
Intelligent systems based methods: Intelligent systems are used extensively for fault classification and decision-making. ANN, FUZZY, ANFIS, SVM, Genetic algorithms, and data analytics are used for classifying the fault and appropriate decision-making.
3.4 Based on the Type of Transmission Line
Protection methods of single circuit lines: Most of the existing transmission systems are single-circuit lines. Fault detection of single-circuit lines is less complex when compared to parallel or double circuit lines of a similar type as there will not be the issue of coupling effects of fault currents and voltages.
Protection methods of double circuit lines: Double circuit or parallel transmission lines are constructed because of economic reasons and right of way constraints. The mutual coupling effect of the parallel lines complicates the protection and fault detection schemes.
Protection methods of multi-terminal lines: Protection of multi-terminal lines is another area of research. Multi-terminal lines are tapped transmission lines, for the protection of which data from more than two terminals are required.
Protection methods of compensated lines: Fixed Series capacitors (FSC) are used to improve the power transfer capability of the line by reducing the transmission line impedance. They may cause under reach /over reach of the relay during fault conditions, subsynchronous resonance and inversion of voltage and current at the relay location. Flexible AC Transmission System (FACTS) devices are used in power systems to achieve dynamic control of power flow, to improve transient stability of the system, and to improve power transfer capability of the transmission line. These devices cause mal-operation of distance relays and affect transient and steady-state voltage and current response.
Accuracy and efficiency of fault detection and location algorithms depend on the proper selection of the method considering the type of transmission line under protection, type and availability of information acquired, and data analysis and decision-making tools used.
4 WAMS-Based Protection Techniques for Uncompensated Lines
Researches in WAMS-based protection technique are gaining importance as the number of PMUs installed in the system is getting increased. WAMS has made the availability of time-synchronized measurements from various substations and power stations at a central control station using suitable communication channels. This has made the wide-area system monitoring and protection efficient. As a result, the operators at the station can be aware and vigilant of the current system conditions and the digital relays using intelligent algorithms may be efficiently used for the protection to avoid blackouts in the system.
Jiang et al.[14, 15] proposed an algorithm that estimates the line parameters using the Clark transformation of the currents and voltages. Then a fault detection index D is calculated in all modes and utilized for the detection and location of the fault. In [16], the algorithm is improved including two fault detection indices M and D. These indices are calculated for all lines. If the magnitude of fault discrimination index M is greater than zero, the relay identifies a fault in its zone and calculates the fault location index D. For an internal fault, the magnitude of D converges to a value between 0 and 1.
Eissa et al. [18] framed an algorithm to identify the faulty area using the magnitude of the positive sequence component of the voltage. The faulty bus has the minimum value of positive sequence voltage magnitude. The absolute angle differences of positive sequence currents of all the lines in the faulty area are calculated and the faulty line is identified as that with the largest angle difference.
Ma et al. [24] developed a wide-area backup protection scheme in which a fault correlation factor (FCF), calculated using the fault steady-state components of voltage and current, is used for faulty line identification. The buses are first grouped into protection correlation regions (PCR) based on the PMU placement and system topology. The faulty PCR is identified using the values of differential currents and using the values of FCF calculated, the faulty line in the PCR is identified.
He et al. [25] suggested a backup protection algorithm in which the fault element identification is done by the fault component voltage distribution. A ratio termed as fault voltage ratio coefficient (FVRC) is calculated. The value of FVRC is greater than 1 for internal faults. In this algorithm, only the substations satisfying preset pickup criterion are allowed to communicate with the central station to reduce the network communication traffic to enhance the speed of the faulty line identification.
Navalkar et al. [26] worked out a new remote backup protection scheme using a residual vector defined using the outputs of a synchrophasor state estimator. The norm of the residual vector is zero if there is no fault in the line and a fault on the line is identified if the norm of the residual vector exceeds a small pickup value.
Jiang et al. [27] put forward a two-stage fault location algorithm. In the first stage, the fault region is identified using a quantity named as matching degree which is a function of fault distance. The matching degree is zero at the fault point and the buses near the fault point will have smaller values. The lines connected to the suspicious buses are marked as suspected lines. Matching degrees throughout the length of a suspected line are calculated and the least value is selected for further comparison. This process is repeated for all the suspected lines and the line with the least matching degree is identified as the faulty line and the fault location is calculated using the corresponding fault location factor.
Al-Mohammed et al. [28] published an algorithm in which Thevenin equivalent impedance at the line terminals are calculated using three consecutive pre-fault measurements and post-fault superimposed measurement from the corresponding PMUs. These impedance values along with the line parameters and measured post fault terminal voltages are used to estimate the fault point voltage in terms of fault distance from both the terminals. When the two estimates are equal the corresponding distance is identified as the fault distance.
Neyestanaki et al. [29] developed a scheme for backup protection in which first the faulted zone is identified from among the predefined backup protection zones (BPZ). When a fault occurs in a BPZ, the sum of positive sequence or zero-sequence currents entering the zone will be relatively very high compared to the no-fault condition. This property is used for faulted zone identification. Faulted line in the BPZ is the line with estimated fault distance that is within the acceptable range. If there is more than one line satisfying the condition, then a relative residual error is calculated for such lines and the line with the least error is identified as the faulty line.
Gopakumar et al. [30] suggest a method to detect and classify a fault occurring anywhere in the system using the data from only one PMU placed at any one of the generator buses in the system. The equivalent voltage and current phase angles at the generator buses with respect to a rotating reference frame are calculated using the Park's transformation of the three-phase voltages and currents measured. The variations over a time period are analyzed using FFT. The features extracted through FFT are utilized for fault detection and SVM is used for fault classification.
Mallikarjuna et al. [31] put forward an algorithm for fault location in which the magnitude of second and third harmonic contents of currents are used to detect and classify a fault in a line. First, the faulty bus is identified using the equivalent harmonic content in terms of second and third harmonics. Then the equivalent harmonic contents of all the lines connected to the faulty bus are calculated. The faulty line is that with the highest equivalent harmonic content. It can also detect the stressed and transient conditions of the system using the magnitude of fundamental phasors.
Leng et al. [6] have developed an algorithm based on the directional traveling wave energy. The ratio of positive direction traveling wave energy and the negative direction traveling wave energy is used to identify the direction of the fault and the protection device association matrix is used to identify the faulty line.
5 WAMS-Based Protection Techniques for Compensated Lines
Compensating devices are used to enhance the power transfer capacity of the line and power system stability and to reduce line losses. This scheme helps the better utilization of existing transmission lines. But compensating devices like fixed series capacitors (FSC) and FACTS devices introduce complexities in the existing distance protection schemes as they affect the impedance seen by the relay.
FACTs compensated transmission lines have FACTS controllers like TCSC, SVC, and UPFC, which control the voltage at a point or active and reactive power flows through the line with the help of power electronic controllers. The fast control actions of these controllers introduce problems in the operation of the relays due to the change in effective impedance, voltage, and current injection from the control devices and due to the transients generated by the operating mode changes. The location and type of FACTS device also affect the apparent impedance of the transmission line and trip boundary of the relay.
Yu et al. [36] framed an algorithm for fault location of TCSC compensated line which consists of two steps—pre-location and correction. In prelocation step, the fault location from two ends DR and DL are calculated using the voltages and currents measured at two ends of a line. A correction step to identify the correct location is proposed by repeatedly calculating the voltage at the other side of the TCSC and the fault location with respect to both sides of the line section after TCSC and selecting the fault location which converges fast. Selected fault location is correct only if the calculated value of resistance RSE is positive. The algorithm is independent of the model of the device and can be applied to any lines with series FACTs compensated line.
Ahsaee et al. [38] proposed an algorithm for the protection of lines with a series FACTS device, which treats the fault location problem as an optimization problem in which the fault resistance and locations are considered as the decision variables. A function J of the variables is defined using the circuit theory approach and its two expressions JS and JR are formulated on the two sides of the FACT device and minimized individually to get two minimum values from which the least value is selected. The fault location and fault resistance are solved corresponding to this selected minimum value of the function.
Nayak et al. [41] published a wide-area backup protection algorithm for a network including a series compensated line. This algorithm utilizes the magnitudes of sequence voltages to identify the faulty bus and fault type. An unbalanced fault in a line is detected using the sign of the cosine of the angle between negative sequence voltage and current at three different locations of the line—sending end, receiving end, and after the series compensation device. A balanced fault in a line is detected similarly using angle between positive sequence voltage and current.
Kang et al. [43] introduced an algorithm to find the fault location in a double circuit series compensated line considering the zero-sequence coupling and shunt capacitance effect based on the distributed parameter model. Two possible solutions on either side of the devices are estimated and the solution is accepted only if the estimated value of fault resistance is positive, the fault location estimate is in accepted range and the series compensation device impedance calculated has a positive real part and negative imaginary part.
Al-Mohammed et al. [44] present a fault loop calculation based algorithm for series-compensated lines in which the line parameters are estimated using PMU data. Bains et al. [45] worked on a supplementary fault location algorithm in the case when the MOVs located in faulted phases are bypassed before fault clearance. This algorithm estimates the voltage drop across the series compensation unit. Sequence voltage and current phasors at the non-faulted end of compensating device are estimated using the sequence components of the measured voltage and current at the line end at the same side. The positive sequence voltage drop, across the compensating device, when the MOVs get bypassed, is estimated in terms of the line current in the section. The fault distance can be estimated utilizing this estimated value of voltage drop.
Ghorbani et al. [47] propose a backup distance protection scheme for lines in the presence of SSSC compensation. Fault resistance is calculated based on active power at the two ends of the protected line. Here, the measured value of voltage across the compensating device is used for modifying the impedance calculated by the relay and to eliminate the effect of the series compensating device.
Mishra et al. [48] researched out a differential protection scheme for SVC compensated lines based on the DWT Technique. It calculates the spectral energy of the phase currents from both ends of the line and the differential spectral energy is used to detect the fault.
Seethalekshmi et al. [49] proposed an adaptive scheme for distance relay of UPFC compensated line which adapts to the trip boundary variations due to the UPFC control parameter changes, fault impedance value, and system operating conditions. UPFC control setting variations are calculated from the UPFC status data communicated using PMU to the relay. The trip decision is taken by comparing the measured impedance and the trip boundary settings.
Mojtaba Khederzadeh [50] proposed an adaptive protection algorithm for the protection of UPFC compensated transmission lines. A fault detection index and a fault location index are calculated using the sequence components of voltage and current at the two ends of the line. The algorithm gives accurate discrimination of internal and external faults.
Mallikarjuna et al. [51] developed an algorithm to avoid the malfunction of distance relay in the presence of FACTS controllers. The impedance trajectory seen by the primary and backup relays, corresponding to earth faults and line to line faults are calculated using the WAMS-based data. If the calculated impedance falls in the range of primary or backup relay impedance trajectory appropriate protection signals are issued.
Biswas et al. [52] used superimposed current components for fault detection, classification, and section identification of UPFC compensated lines. Kumar et al. [53] proposed an algorithm for fault detection in UPFC compensated lines that is able to detect high impedance faults and discriminate between internal and external faults. It uses the differential apparent power to identify the faulty lines.
Dhenuvakonda et al. [54] put forward an adaptive distance relaying algorithm for SSC-based double circuit line. It suggests a modification in impedance calculation to adapt with the operating modes of the SSSC so as to avoid the mal-operation of distance relay for the first zone faults.
Khadke et al. [55] suggest a differential admittance-based algorithm for the protection of FSC compensated lines. The algorithm computes the differential admittance value at both ends of the line and checks whether it is higher than a set value over the period of continuous five cycles to detect a fault.
Fault detection and fault location algorithms for compensated lines should take special care of the protection issues introduced by the compensating device, to avoid malfunctioning of the relays, and to get accurate results. Series compensated lines are the most common among the compensated transmission lines and fixed series capacitor compensation is found to be the simplest and most economic. [41,42,43,44,45] present fault detection and location techniques for series compensated lines. In this study, the fault loop calculation based fault location method in [44] and supplementary impedance based fault location method in [45] for series compensated lines are selected for comparison.
6 Comparative Study of Fault Loop Calculation Based Method and Supplementary Impedance Method for Fault Location in Series Compensated Lines
This section presents a comparative study of the fault loop calculation based algorithm proposed by Al-Mohammed et al. [44] and supplementary impedance based algorithm proposed by Bains et al. [45]. The study is carried on a two-machine system with a series capacitor compensated line which is presented in [45]. Both methods determine fault locations dA and dB (Fig. 3) using information from both terminals of the series compensated line. But the second method considers the effect of bypass gap operation. The simulation study is carried out using MATLAB/Simulink environment (Fig. 4). The change in voltage across the series compensation unit during fault with and without gap operation is illustrated in Fig. 5.

Single-line diagram of series compensated line with possible fault positions

MATLAB Simulation model for the two-machine system with series capacitor compensated transmission line

Voltage waveform across Series Compensation Unit (a) with gap operation (b) without gap operation
In the fault loop calculation based algorithm [44], the line parameters and Thevenin equivalent of the system at a line terminal are continuously calculated using the WAMS data. The line parameters are estimated online using the WAMS data to avoid the errors caused by the change in parameters from time to time due to the variation in environmental conditions and operating conditions. This method uses three different sets of voltage and current measurements from both ends of the series compensated lines. From the three sets of measurements, the Thevenin equivalent voltage and impedance of the system at the line terminals are calculated. The line parameters and voltage across the compensating device are estimated using the least square method. A fault location algorithm estimates the fault distance from either end of the line terminals with two different subroutines using the positive sequence components of measured and estimated information applying the fault loop method. From the two estimated values, the actual value of fault distance is selected using a selection subroutine.
The supplementary impedance based algorithm [45] generates accurate fault location even when MOV in any of the phases of the compensating device gets bypassed by the operation of the bypass gap before the fault clearance. The sequence components of current and voltage at one terminal of the compensating device are estimated using the measured values of currents and voltages at the line terminal on the same side of the compensating device. The voltage at the other terminal of the compensating device can be estimated using these estimated values and impedances of the compensating device. Under no-fault condition, the impedance of the compensating device is equal to the reactance of the series capacitor. When any of the phases gets bypassed by the gap operation, the impedance of that phase becomes zero. Fault location is calculated using this value of terminal voltage. This algorithm is less sensitive to the error in zero-sequence parameter estimation values and requires only one subroutine to estimate the fault location from either side of the compensating device.
Table 1 highlights the differences between fault loop calculation based algorithm [44] and supplementary impedance based algorithm [45]. The performance of both the algorithms is analyzed using MATLAB simulation studies. The values of system parameters are taken the same as those in [45]. The comparative study is limited to the effect of variation of fault location and fault resistance only. Tables 2 and 3 give the comparison of maximum error obtained for different fault types without and with gap operation, respectively.
7 Conclusion
This paper presents a comparative study of the transmission line protection algorithms. Different algorithms for the protection of compensated and uncompensated lines are reviewed for comparison. In the compensated category, FSC compensated lines are the most economical and common solution for improving the transmission capacity of the system, and hence the fault detection and location in FSC compensated lines may be given due importance. A comparative study of the fault loop calculation based algorithm and the supplementary impedance based algorithm for series compensated lines is carried out and the results are presented in this paper. The supplementary impedance based algorithm is found to be giving better results with and without bypass gap operation of series compensation device.
References
Phadke AG (1993) Synchronized phasor measurements in power systems. IEEE Comput Appl Power 6:10–15
Phadke AG, Thorp JS (1988) Computer relaying for power systems. Research Studies Press, Taunton, U.K.
Naduvathuparambil B, Valenti MC, Feliachi A (2002) Communication delays in wide area measurement systems. In: Proceedings 34th Southeast Symposium System Theory, Huntsville, AL, USA, pp 118–122
Phadke AG, Thorp JS (2008) Synchronized phasor measurements and their applications. New York: Springer, pp 197–221
Korkali M, Lev-Ari H, Abur A (2011) Traveling-wave-based fault-location technique for transmission grids via wide-area synchronized voltage measurements., IEEE Transactions on Power Systems 27(2): 1003–1011
Leng Y, Zeng X, Fan J, Gu Y (2017) A wide-area protection method based on directional traveling wave energy, China. Int Electr Energy Conf, pp 621–626
Johns AT, Agrawal P (1990) New approach to power line protection based upon the detection of fault induced high frequency signals. In: IEE Proceedings C (Generation, Transmission and Distribution), 137(4), pp 307–314. IET Digital Library
Bo ZQ, Redfern MA, Weller GC (2000) Positional protection of transmission line using fault generated high frequency transient signals. IEEE Trans Power Delivery 15(3):888–894
Girgis AA, Hart DG, Peterson WL (1992) A new fault location technique for two- and three-terminal lines. IEEE Trans Power Delivery 7(1):98–107
Nagasawa T, Abe M, Otsuzuki, Emura N, Jikihara Y, Takeuchi M (1992) Development of a new fault location algorithm for multi-terminal two parallel transmission lines. IEEE Trans Power Delivery 7(3): 1516–153
Esmaeilian A, Mohseninezhad M, Doostizadeh M, Khanabadi M (2011) A precise PMU based fault location method for multi terminal transmission line using voltage and current measurement. In: 10th international conference on environment and electrical engineering. IEEE, 2011, pp 1–4. https://doi.org/10.1109/EEEIC.2011.5874675
Serizawa Y, Myoujin M, Kitamura K, Sugaya N, Hori M, Takeuchi A, Shuto I, Inukai M (1998) Wide-area current differential backup protection employing broadband communications and time transfer systems. IEEE Trans Power Del 13:1046–1052
Hall I, Beaumont PG, Baber PG, Shuto I, Saga M, Okuno K, Uo H (2003) New line current differential relay using GPS synchronization. In: IEEE power tech conference proceedings, Bologna, Vol 3, pp 23–26
Jiang JA, Yang JZ, Lin YH, Liu CW, Ma JC (2000) An adaptive PMU based fault detection/location technique for transmission lines—Part I: Theory and algorithms. IEEE Trans Power Delivery 15(2):486–493
Jiang JA, Lin YH, Yang JZ, Too TM, Liu CW (2000) An adaptive PMU based fault detection/location technique for transmission lines—Part II: PMU implementation and performance evaluation. IEEE Trans Power Delivery 15(4):1136–1146 October
Jiang JA, Chih-Wen L, Ching-Shan C (2002) A novel adaptive PMU based transmission-line relay-design and EMTP simulation results. IEEE Trans Power Del 17(4):930–937 October
Bo ZQ, Weller G, Lomas T, Redfern MA (2000) Positional protection of transmission systems using global positioning system. IEEE Trans Power Delivery 15(4):1163–1168
Eissa MM, Masoud M (2001) A novel digital distance relaying technique for transmission line protection. IEEE Trans Power Delivery 16(3):380–385
Izykowski J, Molag R, Rosolowski E, Saha MM (2006) Accurate location of faults on power transmission lines with use of two-end unsynchronized measurements. IEEE Trans Power Delivery 21(2): 627–633
Lin X, Gao Y, Liu P (2007) A novel scheme to identify symmetrical faults occurring during power swings. IEEE Trans Power Del 23(1):73–78
Mohanty SR, Pradhan AK, Routray A (2008) A cumulative sum-based fault detector for power system relaying application. IEEE Trans Power Del 23(1):79–86
Liao Y (2008) Fault location for single-circuit line based on bus-impedance matrix utilizing voltage measurements”. IEEE Trans Power Del 23(2):609–617
Eissa MM, Masoud ME, Elanwar MMM (2010) A novel back up wide area protection technique for power transmission grids using phasor measurement unit. IEEE Trans Power Del 25(1):270–278
Ma J, Li J, Thorp JS, Arana AJ, Yang Q, Phadke AG (2011) A fault steady state component-based wide area backup protection algorithm. IEEE Trans Smart Grid 2(3):468–475
He Z, Zhang W, Chen O, Malik P, Yin X (2011) Wide-area backup protection algorithm based on fault component voltage distribution. IEEE Trans Power Delivery 26(4):2752–2760
Navalkar PV, Soman SA (2011) Secure remote backup protection of transmission lines using synchrophasors. IEEE Trans Power Delivery 2(1):87–96
Jiang Q, Li X, Wang B, Wang H (2012) PMU-based fault location using voltage measurements in large transmission networks. IEEE Trans Power Deliv 27(3):1644–1652
Al-Mohammed AH, Abido MA (2014) An adaptive fault location algorithm for power system networks based on synchrophasor measurements. Electric Power Syst Res 108:153–163
Neyestanaki MK, Ranjbar AM (2015) An Adaptive PMU-based wide area backup protection scheme for power transmission lines. IEEE Trans Smart Grid 6(3):1550–1559
Gopakumar P, Reddy MJB, Mohanta DK (2015) Adaptive fault identification and classification methodology for smart power grids using synchronous phasor angle measurements. IET Gener Transm Distrib 9(2):133–145
Mallikarjuna B, Meyur R, Pal D, Reddy MJB (2016) An adaptive secure-dependable wide-area backup protection scheme for transmission lines using multi-phasor measurement units. In: IEEE international conference on power electronics, drives and energy systems
Kumar J, Jena P (2017) Detection of fault during power swing using superimposed negative sequence apparent power based scheme. In: 6th International Conference on Computer Application Electrical Engineering Advances, pp 57–62
Reddy MJB, Venkata Rajesh D, Mohanta DK (2013) Robust transmission line fault classification using wavelet multi-resolution analysis. Comput Electric Eng 39(4), 1219–1247
Dash PK, Pradhan AK, Panda G (2001) Application of minimal radial basis function neural network to distance protection. IEEE Trans Power Delivery 6(1):68–74
Saha MM, Izykowski J, Rosolowski E, Kasztenny B (1999) A new accurate fault locating algorithm for series-compensated lines. IEEE Trans Power Delivery 14(3):789–797
Yu CS, Liu CW, Yu SL, Jiang JA (2002) A new PMU-based fault location algorithm for series compensated lines. IEEE Trans Power Delivery 17(1):33–46
Dash PK, Samantaray SR, Panda G (2006) Fault classification and section identification of an advanced series-compensated transmission line using support vector machine. IEEE Trans Power Delivery 22(1):67–73
Ahsaee MG, Sadeh J (2011) A novel fault-location algorithm for long transmission lines compensated by series FACTS devices. IEEE Trans Power Delivery 26(4):2299–2308
Khederzadeh M, Ghorbani A (2012) Impact of VSC-based multiline facts controllers on distance protection of transmission lines. IEEE Trans Power Deliv 27(1):32–39
Nayak PK, Pradhan AK, Bajpai P (2013) A fault detection technique for the series-compensated line during power swing. IEEE Trans Power Del 28(2):714–722
Nayak PK, Pradhan AK, Bajpai P (2014) Wide-area measurement-based backup protection for power network with series compensation”. IEEE Trans Power Delivery 29(4):1970–1977
Rubeena R, Zadeh MRD, Bains TPS (2014) An accurate online phasor estimation for fault location in series compensated lines. IEEE Trans Power Del 29(2):876–883
Kang N, Chen J, Liao Y (2014) A fault-location algorithm for series-compensated double-circuit transmission lines using the distributed parameter line model. IEEE Trans Power Delivery 30(1):360–367
Al-mohammed AH, Abido MA (2014) A fully adaptive PMU-based fault location algorithm for series-compensated lines. IEEE Trans Power Syst 29(5):2129–2137
Bains TPS, Zadeh MRD (2015) Supplementary impedance-based fault-location algorithm for series-compensated lines. IEEE Trans Power Delivery 31(1):334–342
Kumar J, Khaddar N, Jena P (2017) Protection of double-circuit line with thyristor-controlled series capacitor using principal component analysis. Electric Power Components Syst 45(1):63–74
Ghorbani A, Ebrahimi SY, Ghorbani M (2017) Active power-based distance protection scheme in the presence of series compensators. In: Protection and control of modern power systems
Mishra SK, Tripathy LN, Swain SC (2017) A DWT based differential relaying scheme of SVC compensated line. In: 2017 international conference on innovative mechanisms for industry applications (ICIMIA), pp 295–301
Seethalekshmi K, Singh SN, Member S, Srivastava SC, Member S (2009) Adaptive distance relaying scheme in presence of UPFC using WAMS. In: IEEE/PES Power Systems Conference and Exposition, pp 1–6
Khederzadeh M (2010) Application of synchro phasors to adaptive protection of transmission lines compensated by UPFC, pp 112–112
Mallikarjuna B, Saggurthi A, Reddy MJB, Mohanta DK (2018) December. PMU based distance protection methodology to avert malfunction due to FACTS controllers. In: 20th national power systems conference (NPSC), pp. 1–6
Biswas S, Nayak PK (2018) Superimposed component-based protection scheme for UPFC compensated transmission lines. In: 20th National Power Systems Conference (NPSC), pp. 1–6
Kumar B, Yadav A (2017) Backup protection scheme for transmission line compensated with UPFC during high impedance faults and dynamic situations. IET Sci Meas Technol 11(6):703–712
Dhenuvakonda KR, Singh A, Thakre MP, Karasani RR, Naidoo R (2019) Adaptive digital distance relay for SSSC‐based double‐circuit transmission line using phasor measurement unit. Int Trans Electrical Energy Syst 29(4): e2787
Khadke P, Patne N, Singh A, Shinde G (2020) Pilot relaying scheme based on differential admittance concept for FSC-compensated EHV transmission line. Iranian J Sci Technol Trans Electr Eng 44(2):949–961
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this chapter

Cite this chapter
Sreelekha, V., Prince, A. (2022). Comparative Study of WAMS-Based Transmission Line Fault Detection and Protection Techniques. In: Gupta, O.H., Sood, V.K., Malik, O.P. (eds) Recent Advances in Power Systems. Lecture Notes in Electrical Engineering, vol 812. Springer, Singapore. https://doi.org/10.1007/978-981-16-6970-5_35
Download citation
DOI: https://doi.org/10.1007/978-981-16-6970-5_35
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-6969-9
Online ISBN: 978-981-16-6970-5
eBook Packages: EnergyEnergy (R0)