
Abstract
The load following requirement will be increased greatly while the Small Modular Reactor (SMR) is used for isolated island operation mode. In order to improve the load following ability of the system, the flexible load (FL) is presented in this study to follow the electricity load during load follow. The definition of FL is a type of power consuming system that can change the needed power discretionary. For example, the hydrogen manufacture plant, the desalination facility, the district heating system, and other industrial process heat supply system are all FLs. In order to analyze the dynamic characters of the system, pressurized water reactor (PWR) type SMR (comprised with reactor core and once-through steam generator), balance of plant (BOP), and FL are modeled first. Based on these dynamic models, a SMR-FL dynamic simulation program is built in MATLAB/Simulink environment. According to different system characteristics, two types of FL are considered, and the related load allocation control systems are designed. A typical electricity load is used to verify the designed control systems for the two types of FL. The simulation results show that the designed control systems can achieve load following by adjusting the power consuming of FL and maintaining a constant or moderate changing output of SMR. Obviously, this character can make the SMR-FL system more flexible and efficiency.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
With the lower cost, shorter construction period, and inherent safety, the small modular reactor (SMR) is considered as one of the most promising types of nuclear reactor by the International Atomic Energy Agency (IAEA) [1]. According to Chinese Energy technology innovation “13th Five-Year” plan, the SMR is also the key research and development technical direction in the next develop period. [2].
In the electricity consuming scenarios of micro grid, the load following is in great demand for SMR, such as islands, remote areas, and large-scale ships. But in fact, the load following process leads to the reactor power adjustment frequently. And this will be bad for the nuclear fuel assemblies, the control rods, and the control rod drive mechanism [3]. From an economic point of view, SMR is a low marginal cost investment, so the frequent power changing is inefficient [4, 5].
Based on the above facts, a type of power consuming system named flexible load (FL) is adopted to compensate the variable electricity load during load following. The definition of FL is the flexible industrial process, such as desalination and hydrogen manufacturing, whose products can be stored and/or throughputs can be changed frequently by steam load; for another, the district heating, whose load should be maintained around a stationary value, but could be fluctuated within a certain range. [6].
Because the redundant power generated by SMR can be use in the FL system, the SMR-FL system can improve the load following ability and the system efficiency simultaneously. But the added FL makes the whole system more complexity, and brings some difficulties in the system control. Thereafter, this study focuses on the control system design of the SMR-FL system. Based on the designed control system in this study, the electricity load is allocated by the control system, and is undertaken by the SMR and the FL respectively.
2 Dynamic Model
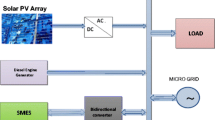
Figure 1 shows the structure diagram of SMR-FL. The SMR-FL contains four main parts: the reactor core, the once-through steam generator (OTSG), the balance of plant (BOP), and the FL. The nuclear steam supply system (NSSS), which is constituted with reactor core, OTSG, and the primary pipes, generate steam for BOP and FL. The generated steam is allocated to BOP to generate electricity, and to FL to produce water or hydrogen or heat respectively. The three valves in Fig. 1 is used to fulfill the load allocation. Valve 1 controls the total steam generated from NSSS, Valve 2 controls the steam output to BOP for electricity production, Valve 3 controls the steam output to FL for power consuming.

The SMR-FL structure diagram
For the control system design, it is necessary to build the dynamic model of SMR-FL, which is derivate as below.
-
(1)
Reactor core dynamic model
The reactor core mode contains the neutron dynamics model and heat transfer model. The neutron dynamics model uses the one-dimension nodal model with feedback [7, 8]. Figure 2 shows the reactor core node partition in the axial direction. According this node partition, Eq. 1 describes the reactor core dynamic model in this study.

The reactor core node partition in the axial direction
where \(N\) is the neutron density, \( C \) is the delayed neutron precursor concentration, \(T\) is the temperature, \( \rho \) is the reactivity, \(\beta\) is the fraction of the delayed fission neutrons, \(w\) is the coupling coefficient, \(\Lambda\) is the average neutron generation time, \(\alpha\) is the reactivity coefficients, \(\lambda\) is the decay constant, \(P\) is the thermal reactor power, \(f\) is the fraction of the core power generated in the fuel, \(\Omega\) is the overall heat transfer coefficient between fuel and coolant, \(M\) is heat capacity of the coolant mass flowrate, \(\mu\) is the total heat capacity. And the subscript \(i, 0, f, c, in, k, r, m\) denote the \(i\) th node, the rated value, the fuel, the coolant, the inlet, the \(k\) th delayed neutron group, and the control rod, respectively.
-
(2)
OTSG dynamic model
The steam generator employed in SMR presented in this study is OTSG. Figure 3 shows the OTSG control volume partition. The OTSG are divided into subcooled section, two-phase section, and superheated section, according the water status in the second side in axial direction, and primary side, tube wall, and secondary side in radial direction.

The division scheme of the OTSG heat transfer sections
In every control volume, \(T\) is the temperature, \(P\) is the pressure, \(L\) is the axial position, \(W\) is the mass flowrate, \({\bar{{\text{Q}}}}\) is the average heat quantity, \({{\bar{\rho}}}\) is the average density, \( {\bar{\text{T}}} \) is the average temperature. The subscript \(x= p, s, w\) denotes the primary side, the secondary side, and the wall respectively. The subscript \(i=0, 1, 2\) denotes the subcooled section, the two-phase section, and the superheated section. The subscript \( j = 0, \cdots {\text{N}} \) denotes the node number in every heat transfer section.
The movable boundary theory is used here. According the control volume division, the mass conservation, energy conservation and momentum conservation equations of every control volume are shown as Eq. 2–4 [9].
-
(3)
BOP dynamic model
The BOP is simplified to a steam turbine to generate electricity power from steam. Therefore, BOP is modeled by a simplified single cylinder model, which can indicate the energy transfer process from steam to electricity power as Eq. 5–8 [6].
where \(S_{0}\) is the steam specific entropy, \(p_{{in}}\) is the inlet pressure, \(p_{{out}}\) is the outlet pressure, \(h_{{in}}\) is the inlet specific enthalpy, \(h_{{out}}\) is the real outlet specific enthalpy, \(h_{{out}}^{'}\) is the ideal outlet specific enthalpy, \(P\) is the generated electricity power, \(W_{{in}}\) is the mass flowrate.
-
(4)
FL dynamic model
The cold trap condition is assumed as saturated water at 0.1 MPa. According this assumption, the FL dynamic model is built as the energy transfer relationship in the FL as Eq. 9 [6].
where \(Q_{{fl}}\) is the output thermal energy from NSSS to the FL, \(W_{{fl}}\) is the steam mass flowrate to the FL, \(h_{{fl}}\) is the steam specific enthalpy at the inlet of the FL, \(h_{{ct}}\) is the saturated water specific enthalpy at the outlet of the FL.
According the different usage of FL, two types of FL are abstracted in this study. (a) Wide range FL, whose steam consuming can be changed in a wide range. Desalination facility and hydrogen manufacturing system are wide range FL. (b) Small range FL, whose steam consuming only can be varied in a small range, but the variation can be fluctuated. The district heating. is small range FL.
3 The Control System Design
The ideal operation program (IOP) is used in SMR [10]. The IOP operation schema means that the reactor core average temperature and the steam pressure are all maintained constant during reactor power variation. The deviation of the measured reactor core average temperature and its setpoint is used to control the reactor powe. The deviation of the measured steam pressure and its setpoint is used to control the feedwater flowrate.
When the wide range FL uses in SMR-FL, the electricity load can be compensated completely and during load following. As a result, the reactor power is maintained constant at the same time. In this condition, the steam flowrate from Valve 1 (\(W_{{NSSS}}\)) should maintain unchanged because of the constant reactor power, the steam flowrate to Valve 2 (\(W_{{tur}}\)) should follow the electricity load. And \(W_{{tur}}\) is controlled by a PID controller according the deviation of the BOP admission pressure and its setpoint. The steam flowrate to Valve 3 (\(W_{{fl}}\)) should be adjusted by Valve3 to fulfill the former two goals. The control logic schema is shown as Fig. 4.

The control logic schema of wide range FL
When the small range FL uses, the electricity load can be compensated partly by fluctuating FL in a certain small range during load following. As a result, the rector power changed moderately at the same time. In this condition, \(W_{{tur}}\), which is controlled by a PID controller according the deviation of the BOP admission pressure and its setpoint, should follow the electricity load. \(W_{{fl}}\) should maintain in a small range. As a result, \(W_{{NSSS}}\) should be changed only when the steam flowrate to Valve 3 exceed its limits. The control logic schema is shown as Fig. 5.

The control logic schema of small range FL
4 Results and Discussion
A SMR-FL simulation program is built according the presented dynamic model in Sect. 2 in MATLAB/Simulink environment. To verify the control systems for wide range and small range FL designed in Sect. 3, a typical electricity load is used as the load following target as shown in Fig. 6.

The typical electricity load
The SMR-FL simulation results with wide range FL is shown in Fig. 7–9.

The output power, (a) electricity power, (b) reactor power, (c) wide range FL power

The steam mass flowrate, (a) to BOP, (b) from NSSS, (c) to the wide range FL

The steam pressure, (a) at the outlet of NSSS, (b) at the inlet of the BOP
Comparing Fig. 6 and Fig. 7(a), it shows the BOP power can follow the electricity load completely. The reactor core power fluctuates around 100% during the transient as Fig. 7(b). The wide range FL power load can compensate the variation of the electricity power to maintain a small fluctuation of reactor core power. Figure 8 shows the steam mass flowrate in the system. The steam from NSSS is separated into two parts, one flows to BOP to generate electricity, and the other flows to the wide range FL. It can be seen that the second part steam compensate the variation of the first part to maintain the total steam mass flowrate around a constant value. In Fig. 9, the steam pressures at the outlet of NSSS and at the inlet of the BOP all fluctuate around its reference value, which means the control system works well.
The SMR-FL simulation results with wide range FL indicated that the wide range FL can compensate the variation of the electricity power completely by adjusting the steam mass flowrate to the FL. And the reactor power is maintained almost constant.
The SMR-FL simulation results with small range FL is shown in Fig. 10–12.

The output power, (a) electricity power, (b) reactor power, (c) small range FL power

The steam mass flowrate, (a) to BOP, (b) from NSSS, (c) to small range FL

The steam pressure, (a) at the outlet of NSSS, (b) at the inlet of the BOP
Comparing Fig. 6 and Fig. 10(a), It shows the BOP power can follow the electricity load completely. The reactor power has a similar trend with the BOP power but has a higher power level in Fig. 10(b), which is because the BOP has a lower efficiency at the non-rated power. The small range FL power fluctuates around its rated value to maintain the reactor core power changing moderately, and maintain an almost stable heat supply. Figure 11 shows the steam mass flowrate in the system. The steam from NSSS is separated into two parts, one flows to the BOP to generate electricity, and the other flows to the FL. It can be seen that the second part steam fluctuates around its rated value to maintain the steam mass flowrate from NSSS changing moderately. In Fig. 12, the steam pressure at the outlet of NSSS and at the inlet of the BOP all fluctuate around its reference value, which means the control system works well.
The SMR-FL simulation results with small range FL indicated that the small range FL can compensate the electricity load variation partly by adjusting the steam mass flowrate to the FL. As a result, the reactor power can be maintained as a moderate variation during the transient, which alleviates the drastic change of reactor thermal parameters.
5 Conclusion
The load following control system design of SMR-FL is studied. Two types of FL named wide range FL and small range FL are presented, modeled and simulated. The related control systems are designed respectively. Based on the established the simulation program of SMR-FL, a typical electricity load is used as load following target to verify the designed control systems. The wide range FL simulation results show that the electricity load variation can be compensated completely by the wide range FL, and the reactor power is almost maintained constant during load following. As for the small range FL, the simulated results show that the electricity load variation needs be compensated by the small range FL and the reactor power simultaneously. During load following, the small range FL power fluctuates around a certain range, while the reactor power variation is moderate. The designed control systems are verified by these results, and the load following method for SMR-FL by the wide rage and small range FL is also verified.
References
IAEA: Advances in Small Modular Reactor Technology Developments. IAEA, Vienna (2016)
National Development and Reform Commission, National Energy Administration: Chinese Energy technology innovation “13th Five-Year” plan (2016)
IAEA: Instrumentation and Control Systems for Advanced Small Modular Reactors. IAEA, Vienna (2017)
Bragg-Sitton, S.M., et al.: Nuclear-Renewable Hybrid Energy Systems (2016)
Technology Development Program Plan, INL/EXT-16–38165, Idaho National Laboratory (2016)
Ma, Q., et al.: Load following of SMR based on a flexible load. Energy 183, 733–746 (2019)
Wei, X., et al.: A master-slave control strategy of the multi-modular SMR. Ann. Nucl. Energy 126, 269–280 (2019)
Wang, P., et al.: Nodal dynamics modeling of AP1000 reactor for control system design and simulation. Ann. Nucl. Energy 62, 208–223 (2013)
Wan, J., et al.: Conventional controller design for the reactor power control system of advanced small pressurized water reactor. Nucl. Technol. 198(1), 26–42 (2017)
Peng, M., Du, Z.: Research on ideal steady-state programming of marine PWR nuclear power plant. Chin. J. Nucl. Sci. Eng. 21(4), 304–310 (2001)
Acknowledgement
This work is supported by the National Natural Science Foundation of China (11875218) and Fundamental Research Funds for the Central Universities (xjh012020032).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Liu, MM., Sun, AD., Qiu, LL., Zhang, R., Wei, XY. (2021). Study on the Load Following Control of SMR with Flexible Load. In: Xu, Y., Sun, Y., Liu, Y., Gao, F., Gu, P., Liu, Z. (eds) Nuclear Power Plants: Innovative Technologies for Instrumentation and Control Systems. SICPNPP 2020. Lecture Notes in Electrical Engineering, vol 779. Springer, Singapore. https://doi.org/10.1007/978-981-16-3456-7_73
Download citation
DOI: https://doi.org/10.1007/978-981-16-3456-7_73
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-3455-0
Online ISBN: 978-981-16-3456-7
eBook Packages: EnergyEnergy (R0)