
Abstract
The pulsar position parameters error is one of the main factors affecting the accuracy of X-ray pulsar autonomous navigation and pulsar time keeping. There is a nonlinear relationship between pulsar position parameters and pulsar timing residuals. Based on the above issues, this paper established a mathematical model for parameter estimation of pulsars’ right ascension and declination errors, analyzed the pulsar timing residuals caused by different planetary ephemeris, and studied the influence of the errors of right ascension and declination of pulsars on the timing residuals. On this basis, the pulsar position parameters are estimated by the least square method. And the simulation experiment and analysis are carried out. The results show that, based on the proposed method, using DE430 planetary ephemeris, when the timing residual is 0.1 us, the accuracy of pulsar position estimation accuracy is about 0.03 mas, which shows the effectiveness of the proposed method.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
In recent years, with the development of space science and technology, deep space exploration has become a hot topic of concern in all countries. X-ray pulsar based navigation (XPNAV) has been widely studied by scholars all over the world for its superior characteristics, which can provide autonomous navigation information such as position, velocity, attitude and time for near earth, deep space and even interplanetary spacecraft. In 2016, the institute of high energy physics Chinese academy of sciences and technology and engineering center for space utilization Chinese academy of sciences analyzed the data of Crab pulsar for one month observed by using the gamma-ray burst polarization detector on ‘Tiangong2’. The orbit determination of tiangong2 is carried out, and the error is about 20 km (3σ), which verifies the feasibility of autonomous navigation based on X-ray pulsar [1]. In 2017, NASA successfully carried out the project of ‘Space X-ray Timing and Navigation Technology Detector (SEXTANT)’ on the international space station, which confirmed that millisecond pulsar can be used to accurately determine the position of high-speed moving objects in space. The highest positioning accuracy of this experiment is 4.8 km (1σ), which proved the feasibility of XPNAV technology [2]. In 2019, the Chinese Academy of Sciences announced that the X-ray pulsar navigation experiment was carried out by using China’s first astronomical satellite “Insight”, and the positioning accuracy reached 10 km (3σ), which further verified the feasibility of pulsar autonomous navigation [3]. Millisecond pulsars play an important role in pulsar timing and X-ray pulsar based navigation, and have been widely studied in recent years. The long-term stability of 15 years of PSR B1855+09 is better than that of the atomic time maintained by USNO, it is close to the PTB atomic time standard maintained by German Institute of Technical Physics. This result will be improved in the future [4]. The accuracy of TOA measurement of the of millisecond pulsar will also improve the accuracy of pulsar positioning and the large planet calendar.
The accurate establishment of pulsar timing model is the key of XPNAV, which determines the accuracy of XPNAV. The timing model can be divided into single pulsar timing model and binary pulsar timing model. Among them, the parameters of pulsar timing model include pulsar rotation frequency, frequency derivatives, pulsar right ascension/declination, right ascension/declination of pulsar proper motions, etc. On the basis of single pulsar timing model parameters, the binary pulsar timing model includes Kepler parameters, which has more parameters and more complex models. In the aspect of pulsar timing model research, in 1985, Davids studied the timing model and residual model considering gravitational delay [5]. In 1986, Hellings studied the relativistic effect that must be considered when converting the TOA measured by ground station to the natural coordinates of pulsar, and analyzed the influence factors such as proper motion and parallax [6]. In 1990, Fosterhe and Backer studied the model of estimating pulsar parameters by using the information of pulse TOA measurement, which established the parameter support for the establishment of timing model [7]. In the same year, Doroshenko and Kopeikin systematically analyzed the whole process of pulse TOA processing by constructing the coordinate systems of mass center, geocentric and station center [8]. In 2006, Hobbs, Edwards and others studied the pulsar timing software tempo2, and gave the timing model and the fitting method of each parameter [9]. Based on the Hellings model, Sheikh built a time conversion model for pulsar navigation [10]. Zhou Qingyong analyzed the pulsar timing model and rotation stability [11]. Wang Yidi studied the pulsar dynamic signal processing method, and proposed a prediction method of pulsar timing noise based on time series analysis, and compensated the system error which affects the pulsar navigation [12]. Li Liang and Wang Guangli studied the feasibility of pulsar navigation of measurement acquisition, integer ambiguity, scope of application from the perspective of astrometry [13].
Planetary ephemeris error is a major factor affecting the navigation and timing accuracy of pulsars. Accurate pulsar position is the premise of pulsar navigation. When the right ascension or declination error of pulsar reaches 1 milliarcsecond, the maximum positioning error can reach 700 m [14].Thus, it is necessary to estimate the error of the right ascension and declination of the pulsar, so as to realize the high-precision estimation and update of the pulsar position and provide the parameter support for XPNAV. In the aspect of pulsar position estimation, Sun Shouming analyzed the influence of pulsar position error on different navigation algorithms, studied the principle of pulsar position error estimation and established relevant mathematical models [14]. Sun Xiong used grid method to traverse and search the position of pulsars based on the whitened residuals [15], which can improve the accuracy of right ascension and declination of pulsar to a certain extent. However, the grid method needs a lot of points and large calculation, it presents a great challenge to on orbit computing resources. Meanwhile, the determination of initial position parameters and the determination of mesh size need to be further studied.
In order to estimate the error of right ascension and declination of pulsar with high accuracy in a small amount of computation, a pulsar timing parameter estimation model is established in this paper. The nonlinear problem is transformed into a linear problem, the pulsar position parameter estimation model based on least square method is derived. And the influence of different planetary ephemeris on timing residuals is analyzed based on experiments. On this basis, the least square method is used to estimate the position of pulsars under different timing residual accuracy, which verifies the effectiveness of the proposed method.
2 Pulsar Timing Model
Pulsars have the effect of slow rotation. The pulsar timing model describes the transformation of its rotation characteristics with time. In inertial reference frame, the mathematical expression of pulsar signal phase model is as follows [16]
Here the observation time t is the Barycentric Dynamical Time (TDB) or Barycentric Coordinate Time (TCB) at Solar System Barycentric (SSB) or pulsar, \(\Phi (t)\) is the phase of pulsar signal at time t, \(\Phi_{{0}}\) denotes an accumulated initial phase at reference epoch t0.The parameter \(f^{(k - 1)}\) means the k-order frequency derivative, and if k = 0, \(f^{(0)} = f_{0}\) [16].
The pulsar timing model can accurately predict the phase information of pulsar signal at a certain time, and can provide accurate phase prediction information for pulsar navigation. Based on the pulsar phase model which establishes at the center of mass (SSB) of the solar system, we compared the cumulative profile with the standard profile at SSB, and can obtain the phase difference between the center of mass of the solar system and the spacecraft. Then the time difference between the arrival of pulsar signal to SSB and spacecraft can be obtained. Using it as the basic measurement of navigation, we combined with the state model of spacecraft and navigation filtering method, the autonomous navigation of spacecraft based on pulsar can be realized [17].
2.1 Timing Residuals
The position error of pulsar reflected in the timing model is mainly reflected in the timing residual. The relationship between pulsar position error and timing model is nonlinear. Therefore, we transformed the nonlinear problem into a linear problem, solved the timing residual, and calculated the position error of pulsar to obtain more accurate parameters of right ascension, declination and rotation. It is a feasible way to improve the precision of timing model and pulsar navigation.
The expression of pulsar signal converted from spacecraft to SSB can be written as [8]
Where \(t_{SC}\) is time of arrival of pulse to spacecraft, \({\tilde{\varvec{n}}}\) is pulsar position vector which obtains right ascension and declination, \({\varvec{r}}_{SC/E}\) is the position of the earth relative to SSB, \(\delta_{t}\) includes the Shapiro delay effect produced by the planets and celestial bodies in the solar system, the bending of light path caused by the solar gravitational field and the gravitational delay.
The position error of pulsar can be expressed as \({\tilde{\varvec{n}}} = {\varvec{n}} - \Delta {\varvec{n}}\), by substituting it into formula (2), we can get
Then, the timing residual of the pulse arriving at SSB caused by pulsar position error is as follows:
It can be seen from formula (4) that due to the influence of pulsar position errors, in actual navigation, there have timing residuals as shown in formula (4), which will lead to spacecraft positioning error based on XPNAV.
2.2 Solution of Pulsar Right Ascension and Declination Based on Least Square
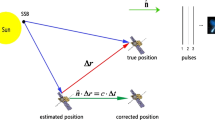
In order to solve the problem of timing residual caused by pulsar position errors, it’s very important to study the calculation method of pulsar position error. The timing residuals are obtained from formula (4), the pulsar position errors are obtained by the least square analysis of timing residuals. The solution principle is shown in Fig. 1

Principle of pulsar position error estimation
The right ascension of pulsars is \(\alpha\), and the declination is \(\delta\), and the unit vector of pulsar direction is \({\varvec{n}}\; = \;\left[ {\begin{array}{*{20}c} {\cos \delta \cos \alpha } & {\cos \delta \cos \alpha } & {\sin \delta } \\ \end{array} } \right]^{T}\). Then the position of the pulsar with errors is \((\tilde{\alpha },\tilde{\delta })\), the position error is \((\Delta \alpha ,\Delta \delta )\) which satisfied
Substituting formula (5) into the expression of pulsar unit vector. By first-order Taylor expansion, the first-order term is obtained and the second-order term is ignored, then it can get the formula as follows [12]
By substituting formula (7) into formula (4), the relationship between pulsar timing residuals and the errors of right ascension and declination of pulsar can be obtained,
Where, \(\Delta t_{i}\) is the timing residual of an observation, \(r_{sc/x}\) is the component of position vector of spacecraft relative to SSB in x direction, \(r_{sc/y}\)、\(r_{sc/z}\) is the component of spacecraft position vector relative to SSB in y and z directions. Through multiple observations, multiple sets of timing residuals can be obtained, and the pulsar position can be solved by the least square method. Its mathematical model can be expressed as
Among them, the above parameters can be expressed as
The position error of pulsar can be deduced based on the least square method [12]
Where \({\varvec{X}}\) is the position error of pulsar to be estimated, \({{\varvec{\delta}}}_{{\varvec{T}}}\) is timing residual, A is the cosine matrix with pulsar position error.
3 Experiment and Analysis
It can be seen from Eq. (8) that the timing residual is related to the position error of pulsar and the position of spacecraft relative to SSB. Based on this, this paper discusses the influence of these factors on the timing residuals from two aspects: the earth position error and the pulsar position error. We select B0531+21 pulsar as the estimation object. Its right ascension is 83.63°, and its declination is 22.01°. On this basis, we combined with timing residuals, based on the least square method proposed in this paper, to solve the right ascension and declination errors of pulsars.
3.1 The Influence of Planetary Ephemeris on Timing Residuals
Planetary ephemeris records the position list information of one or more celestial bodies at a specific time every day, which plays an important role in deep space navigation, interplanetary exploration [18]. A series of planetary ephemeris have developed by NASA’s Jet Propulsion Laboratory (JPL), including DE421, DE430 and others. Based on two different planetary ephemeris, this paper analyzed the position errors of the planets recorded by the two ephemeris.
Firstly, using the two sets of planetary ephemeris DE421 and DE430, this paper analyzes the difference of the earth’s position in the two planetary ephemeris, the results are shown in Fig. 2. Among them, the calculation time range is from January, 2005 to January, 2015, and the step is 1 day.

Different ephemeris of DE430 and DE421 position of the earth
We use two planetary ephemeris. DE421 includes ranging and VLBI measurements of the Mars probe, new ranging and VLBI measurements of the Venus probe, and the latest estimates of planetary mass, lunar laser ranging, and two-month CCD measurements of Pluto, covering the 1900–2050 time range.DE430 covers the time interval from January 1, 1550 to January 22,2650, and has the most accurate lunar ephemeris. Figure 2 shows the position errors of the earth in DE430 and DE421 ephemeris, which shows a periodic trend in the past decade. Among them, the maximum difference of the two groups of ephemeris is 300 m, and with the increase of time, the difference of the ephemeris increases slightly. As can be seen from Fig. 3, the maximum pulsar timing residual caused by the difference of the earth position of the two ephemeris is 1 μs.

Timing residual difference of DE430 and DE421
3.2 Effect of Pulsar Position Error on Timing Residuals
In pulsar navigation, the influence of the error of right ascension and declination on the navigation accuracy can be reflected from the influence of the error of right ascension and declination on the timing residual. Figure 4 and 5 show the calculated timing residuals when the errors of right ascension and declination of PSR B0531+21 are 20 mas, 2 mas and 0.2 mas.

Timing residuals corresponding to different right ascension errors

Timing residuals corresponding to different declination errors
It can be seen that the errors of right ascension and declination reflected in the timing residuals are annual periodic terms, which are mainly due to the periodic change of the timing residuals introduced by the earth’s revolution. In general, with the increase of the error of the right ascension and declination, the pulsar timing residual becomes larger. Here, due to the influence of the selected pulsar azimuth, the timing residual caused by the declination error is greater than that caused by the error of the right ascension in the same case. Compared with Fig. 3 and Fig. 5, the magnitude of timing residuals caused by 20 mas declination error is equivalent to that of pulsar timing residuals caused by different planetary ephemeris, both of which are in the order of 1 μs.
3.3 Calculation and Analysis of Right Ascension and Declination Errors of Pulsars
In this section, we study the estimation of pulsar position error based on least square method under different timing residuals. The planetary ephemeris used in the calculation is DE430, which starts from January 1, 2005 and lasts for three years. A total of 500 groups of pulse arrival times are calculated. The arrival time of the pulse is the simulation data, the time limit is three years, and the random number between them is taken as the pulse TOA, and the errors of right ascension and declination are all set at 1.8 mas. The mean value is obtained by 500 operations, and the position errors and its mean square deviations of pulsars with different timing residuals accuracy are calculated based on the least square method. The results are shown in Table 1, where RA is error of right ascension, DEC is error of declination. In this paper, the earth position given by different planetary ephemeris of DE421 and DE430 is different, which will lead to the deviations of pulsar position and introduce timing residual errors, which are not considered in this paper and need further research in the future.
It can be seen from Table 1 that the proposed method can accurately estimate the right ascension and declination parameters of pulsars. In general, with the decrease of the accuracy of timing residuals, the position estimation error of pulsars increases significantly, that is, the higher the accuracy of each timing residuals, the smaller the position estimation error of pulsars. When the timing residual is 0.1 μs, the position estimation accuracy of pulsar is about 0.03 mas; when the timing residual is 50 μs, the position estimation accuracy of pulsar is about 53 mas. This shows that the accuracy of the arrival time of the pulsar directly affects the accuracy of the pulsar position estimation. It can be seen from the table that the mean error of right ascension and declination is not 0, which is mainly due to the truncation error introduced in the linearization of the model. In addition, based on the least square pulsar position estimation proposed in this paper, the calculation accuracy of the right ascension error is higher than that of the declination error, which may be related to the azimuth estimation of the target object and the linearization truncation of the model. The right ascension and declination of the PSR B0531+21 used in this paper are 83.63° and 22.01° respectively, and the propagation path of the pulsar signal caused by the declination error of the pulsar is longer than that caused by the right ascension error of the same value, so it will cause large timing residual. Table 1 shows the strong correlation between pulsar position and timing residuals. A large number of simulation studies will be conducted to explore the reasons.
4 Conclusions
In order to solve the problem of large amount of calculation in the existing estimation methods of pulsar position parameters estimation, this paper deduces the relationship model between pulsar position parameters and timing model, and transforms the nonlinear problem into linear problem. On this basis, we give the least square estimation method of pulsar position parameters. Based on the simulation experiment, we analyze the earth position difference of different ephemeris and its influence on timing residuals. Finally, we estimate the position parameters of the pulsar under different timing residuals. The results show that the difference of the earth position calculated by DE430 and DE421 ephemeris results in a timing residual error of 1 μs. The timing residual accuracy has a significant impact on the estimation of pulsar position parameters. When the timing residual is 0.1 μs, the pulsar position estimation accuracy is about 0.03 mas; when the timing residual is 50 μs, the pulsar position estimation accuracy is about 53 mas.
Found by Space Optoelectronic Measurement & Perception Laboratory of BICE No. LabSOMP-2020–06.
References
Wei, Z., Jun, X., Qinglong, H., Xiao, C.: Survey of autonomous celestial navigation technology for deep space. J. Flight Control Detect.
Haiming, W.: NASA completes the world’s first space validation of X-ray pulsar navigation. J. Space Sci. 38(3), 277–278 (2018)
Fangjun, L., Shuangnan, Z.: HXMT--China’s first X-ray astronomical satellite. J. Phys. (06), 341–347 (2017)
Tinggao, Y., Chongxia, Z.: Progress in timing observation of millisecond pulsars. Prog. Astron. (01), 1–9 (2005)
Davis, M.M., Taylor, J.H., Weisberg, J.M., Backer, D.C.: High-precision timing observations of the millisecond pulsar psr1937+21. Nature 315, 547–550 (1985)
Hellings, R.: Relativistic effects in astronomical timing measurements. Astron. J. 91, 650–665 (1986)
Foster, R., Backer, D.: Constructing a pulsar timing array. Astron. J. 361, 300–308 (1990)
Doroshenko, Q., Kopeikin, S.M.: High-precision pulse timing for single pulsars. Sov. Astron. 34(5), 496–501 (1990)
Edwards, R.T., Hobbs, G.B., Manchester, R.N.: TEMPO2, a new pulsar timing package. I: The timing model and precision estimates. arXiv: astro-ph/0607664v1
Sheikh, S.I., Hellings, R.W., Matzner, R.A.: High-order pulsar timing for navigation. In: Proceedings of the 63rd Annual Meeting of the Institute of Navigation, Cambridge (2007)
Qingyong, Z.: Research of Timing model and rotation stability of Pulsars. Information Engineering University, Zhengzhou (2011)
Yidi, W.: X-ray pulsar-based navigation: signal processing and positioning algorithms. National University of Defense Technology.
Liang, L., Guangli, W., Li, G.: Astrometric considerations for pulsar navigation. J. Deep Space Explor. 5(03), 235–240 (2018)
Shouming, S.: Study on autonomous navigation method of spacecraft based on X-ray pulsars. National University of Defense Technology (2011)
Xiong, S.: Research on frequency search and timing model of X-ray Pulsars. Xidian University (2018)
Sun, H.F., Sun, X., Fang, H.Y., et al.: Building X-ray pulsar timing model without the use of radio parameters. Acta Astronautica. 143 (2017)
Sheikh, S.I.: The use of variable celestial X-ray sources for spacecraft navigation (2005)
Min, F., Guangliang, D., Xuemei, D.: J. Aircr. TT & C. 31, 11 (2012)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Chen, S., Shen, Lr., Shi, Yq., Li, Xp., Su, Z., Sun, Hf. (2021). Parameter Estimation of Pulsar Position Based on Least Square. In: Yang, C., Xie, J. (eds) China Satellite Navigation Conference (CSNC 2021) Proceedings. Lecture Notes in Electrical Engineering, vol 773. Springer, Singapore. https://doi.org/10.1007/978-981-16-3142-9_62
Download citation
DOI: https://doi.org/10.1007/978-981-16-3142-9_62
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-3141-2
Online ISBN: 978-981-16-3142-9
eBook Packages: EngineeringEngineering (R0)