
Abstract
Long-distance transmission presents issues related to transmission losses due to long and multiple transmission cables. High-voltage direct current transmission technology provides key advantages in the bulk transmission of energy as compared to other modes of transmission. Due to the long length of HVDC line, protection and maintenance of the system are a challenge. Various types of faults could potentially occur in an HVDC system, both AC and DC, which are not only dangerous for the system itself but also people and the surroundings .In this paper, detection-isolation-restoration (DIR) algorithm has been developed and proposed based on IEEE 1159 standard, which provides a clear distinction between each fault state and provides a unique response for the same. The proposed protection algorithm has been implemented through simulations for three-phase symmetrical fault on the AC side and line-ground fault on the DC side of the Monopolar HVDC system for different fault durations. The fault current measured through the DC transmission line serves as an indicator.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
High-voltage direct current (HVDC) transmission is regarded as a popular medium for bulk power transmission over long distances. This transmission system involves the conversion of power to high voltage DC at the generating side and is converted back to the desired form of Energy at the consumer side. Advancements in the field of power electronics and improved flexibility of power control have enabled HVDC transmission to become a desirable choice despite the dynamic behavior of the grid. An HVDC link avoids various problems present in HVAC transmission. Comparisons between the two systems are made based on the economics of transmission, reliability and technical performance. Figure 1 shows the cost (relative) between AC and DC transmission lines versus distance. The initial cost of investment is more in the case of HVDC systems. However, this breaks even relative to HVAC systems and is more economically beneficial for distances greater than break-even distance. An HVDC system requires one or two conductors, whereas a three-phase HVAC system requires three conductors. Bipolar DC lines and double circuit AC lines are equally reliable, due to its ability to transfer energy during the event of failure or fault at one of the poles, the other pole can supply at least 50% energy with a ground return. DC links have complete autonomy over the power transmission in both directions, and fast control enables DC lines to limit fault currents. Theoretically, power transmitted by a bipolar line is equal to that transmitted by a three-phase system. This is a technical and economic superiority of HVDC systems over HVAC systems [1]. The drawbacks of HVDC transmission are mainly the generation of harmonics due to the operation of converters, mandatory use of static var compensators, the futility of transformers in a DC system.

Relative cost of AC and DC transmission lines vs distance [3]
HVDC systems are branched into three most common schemes based on the number of conductors in operation, flexibility in load demand, reliability concerns and economic feasibility. Following three are the most common schemes [2]. Monopolar: two converters are linked by a single line where either a negative or positive voltage is used with the ground as the return path for transmission of voltage [2]. Bipolar: usually a combination of two monopolar systems, i.e., two conductors of opposite polarity are used. Homopolar: two conductors or more that are of the same polarity are used with the ground acting as the return path.
Protection schemes for HVDC are designed to isolate the faults quickly and protect the operator
Protection Requirements
-
Fault restoration ought to be fast and accurate.
-
Sensors of high sensitivity are to detect all faults
-
Protection method ought to be robust and eliminate redundancies.
-
Operating conditions should be restored within critical time.
In order to achieve faster response against faults and timely restoration, DIR algorithm has been developed in this paper.
2 System Components of HVDC
Figure 2 shows the basic system components of HVDC which can be categorized into,

Basic components of HVDC system
-
Converters
-
Transformers
-
Filters
-
Transmission Line.
Converters at the sending end side convert AC to DC and at the receiving end side of the HVDC system convert DC to AC. These converters are connected to their respective sides through a transformer that steps up/down voltage levels to desired levels. Filters are of two types, AC side filters and DC side filters. AC side filters limit the harmonic currents produced and compensate the reactive power consumed by HVDC converters. DC side filters are used to suppress the voltage ripples that are caused by the converters. Considering the environmental impacts of HVDC transmission, overhead transmission lines are preferred [4].
3 Faults in HVDC System
Circuit breakers are used to disconnect the line during the occurrence of faults and restored once the fault has been cleared. Deadtime is shorter for DC line as DC fault current is lesser than AC fault current. Commonly, observed faults in HVDC transmission systems are shown in Table 1 [5,6,7].
4 Protection Schemes and Power States for HVDC Systems
4.1 Fault Clearing Strategies
Line Protection: the time of fault clearing is limited to several seconds by using fast DC breakers and can be increased using additional current limiters. Another method is to use fault blocking converters like IGBT, which terminate the faulted line and limit the current to be interrupted hence reducing the time constraint [8].
Open Grid Strategy: along with the strategy used above, the line is put out of order for repair, and the healthy line is immediately reclosed. Since it involves switching between two lines, the stability concern increases and hence the time constraint is more stringent [8].
Low-Speed HVDC Protection - this is ideally useful in smaller DC networks where switching from DC to AC is not an issue. Fault current is limited, which prevents complete shutdown of the HVDC system hence enabling faster recovery [8].
According to [9, 10] IEEE 1159-1995 Power Quality Standards, variations in the power system are classified as depicted in Table 1. For simulation purposes, momentary, temporary, long duration interruptions are simulated. Depending on the severity of the fault causing the interruption circuit breaker operations are performed. Operations of the circuit breaker are performed based on the above-specified power system states. According to [11], power system states can be classified into the following five states as depicted in Fig. 3.

Power system operational states [11]
5 Simulation Using the Proposed Algorithm
5.1 Simulation Model Under Consideration
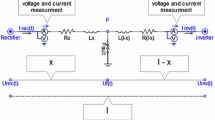
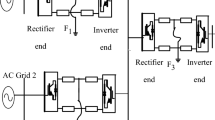
This model consists of two utility grids, 500 kV 5000 MVA at sending end and 345 kV 10,000 MVA at receiving end. A 500 km HVDC line links the two. Twelve pulse converters are used on either side. Base current and voltage are 2000 A and 500 kV, respectively. Figure 4 shows the pu representation of the system. Figure 5 shows the model of the system under consideration for fault analysis and restoration.

pu Representation of the system

Monopolar HVDC system under consideration [12]
The output voltage at the DC end of a HVDC transmission line is calculated as,
where α is the firing delay angle of the rectifier.
The expression gives DC line current,
Power transported to across the end of the line is given by
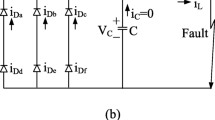
where Rdc is the dc resistance for positive transportation line conductor [13], Fig. 5 shows the model for the DC fault Simulation.
Figure 6 and 7 show the DC & AC fault simulated circuit, respectively.

DC fault simulation

AC fault simulation
Ibase = 2000 A; Vpu = 1 = 500 kV;
Zpu = 0.04 + 0.194j
Ifault pu = 5pu 78.3 deg lag
Iactual = 10 KA
5.2 Proposed DIR Algorithm
DIR algorithm has been implemented on L-G DC fault and L-L-L-G AC fault through simulation. Based on the duration of fault time, as mentioned in Table 2, simulation has been implemented for three different cases.
-
Case 1: Fault time < 3 s (momentary).
-
Case 2: 1 min > Fault time > 3 s (temporary).
-
Case 3: 1 min < Fault time (sustained).
Figure 8 shows the DIR algorithm for the separation of the faulty portion from the healthy portion of the system by isolating the faulty portion. The system is restored to the original state upon clearance of the fault.

Detection—isolation—restoration algorithm
For currents greater than 1.1 pu, the fault is detected, and the state of the system is alert/emergency. Increased scanning time (fault time) results in the changing of the system state. For temporary—emergency and sustained—emergency/extreme (extremis) faults the line is disconnected to prevent the flow of fault current; the line is reinstalled (connected) once the fault has been cleared or isolated manually and cleared as required in the latter.
6 Result and Analysis
For simulation purposes, 1 s simulation time = 5 s real time. During fault, all observations are done on the DC line.
6.1 DC Fault Analysis
Case 1: Fig. 9 shows the result for simulated momentary fault (at t = 3 s). This fault is self-healing hence does not require any operation

Momentary DC fault-DC line current (A)
Case 2: Fig. 10 shows the result for simulated temporary fault (at t = 1 s) without line disconnection. Figure 15 shows the result for simulated temporary fault (at t = 1 s) with line disconnection. Since the scan time exceeds 3 s (0.6 s simulated time) the state of the system moves to emergency state. Once the fault is cleared (region 4) the system state is in restorative state. In Fig. 11 the line has been disconnected in region 3 where the scan time (fault time) exceeds momentary fault condition.

Temporary DC fault-DC line current (A) without line disconnection

Temporary DC fault-DC line current (A) with line disconnection
Fault current of 95 Amps is disconnected.
Residual Fault current is 4 A.
Case 3: Fig. 12 shows the result for simulated sustained fault (at t = 1 s) without line disconnection. Figure 13 shows the result for simulated sustained fault (at t = 1 s) with line disconnection. The fault persists beyond momentary & temporary conditions and becomes sustained fault. Hence manual fault clearance/isolation is necessary. Once the fault has been cleared, the line is connected back to the system. This comprises of the restorative phase as shown in region 5. Region 6 is normal state. Circulating fault current is avoided.

Sustained DC fault-DC line current (A) without line disconnection

Sustained DC fault-DC line current (A) with line disconnection
Fault current = 95A
Residual fault current = 4A
6.2 AC Fault Analysis
Case 1: Fig. 14 shows the result for simulated momentary fault (t = 5–5.4 s). Fault duration is 2 s in real time (0.4 simulated time). This is a self-healing fault and hence no circuit breaker operation is required. The system is put to alert state at the time of fault.

Momentary AC fault-DC line current (p.u.)
Case 2: Fig. 15 shows the result for simulated temporary fault (at t = 3 s) without line disconnection. Figure 16 shows the result for simulated temporary fault (at t = 3 s) with line disconnection. The scanned time in Figs. 15 and 16 is greater than 3 s real time (0.6 s simulated time) this region is classified as Emergency state. At T = 8 s the fault is cleared and the restorative state begins. In region 2 of Fig. 16, fault current is not observed (close to 0 pu) because the protection scheme disconnects the line.

Temporary AC fault-DC line current (p.u.) without line disconnection

Temporary AC fault-DC line current (p.u.) with line disconnection
Case 3: Fig. 17 shows the result for simulated sustained fault (at t = 1 s) without line disconnection. Figure 18 shows the result for simulated sustained fault (at t = 1 s) with line disconnection. Since the fault lasts more than 1 min (12 s simulated time) the fault is now regarded as sustained AC fault and the power system enters emergency/extremis state (regions 3). This requires manual intervention to isolate and clear the fault. Figure 18 shows At T = 14 s the fault is cleared and restoration state beings. In Fig. 18, the circuit breakers are used to cut the line and protect the system from fault current in regions 2 and 3 hence we do not observe any current.

Sustained AC fault-DC line current (p.u.) without line disconnection

Sustained AC fault-DC line current (p.u.) with line disconnection
Table 3 summarizes the results obtained for the various cases. These results have been verified mathematically
7 Conclusion
In this paper, symmetrical faults on the AC and Pole-Ground fault-DC side of the Monopolar HVDC system has been analyzed through simulation. Detection-isolation-restoration (DIR) algorithm has been presented and successfully implemented employing pole controllers and circuit breakers. Thus, eliminating the fault current in the system. This method takes into account the different fault states-like momentary interruptions, temporary fault and the sustained fault which have been identified by IEEE 1159-1995 Standards. The system states have been classified as Normal, Alert & Emergency, Extreme and Restorative states depending on the duration of the fault. Each of them demands a different response and the same is taken care. This work can be used further in the process of protection gear selection. The results and graphs obtained from the simulations were verified with expected manual results and have been presented in this paper.
References
S. Kamakshaiah. V. Kamaraju, HVDC transmission, (TATA McGraw-Hill, 2011), pp. 22–28
K.S. Lakshmi, G. Sravanthi, L. Ramadevi, A review paper on technical data of present HVDC links in India. Int. J. Recent Innov. Trends Comput. Commun. (IJRITCC)
S. Kamakshaiah, V. Kamaraju, HVDC Transmission, (TATA McGraw-Hill, 2011). Fig 1.8(a)
B. Taormina, J. BaldJuan, A. Want, T. Gerard, L. Morgane, D. Nicolas, C. Antoine, A review of potential impacts of submarine power cables on the marine environment: knowledge gaps, recommendations and future directions, Renew. Sustain. Energy Rev. 96, 380–391 (2018)
K. Khaimar, P.J. Shah, Study of various types of faults in HVDC transmission system, in 2016 International Conference on Global Trends in Signal Processing, Information Computing and Communication (ICGTSPICC), Jalgaon, 2016, pp. 480–484. https://doi.org/10.1109/icgtspicc.2016.7955349
A.K. Khairnar, P.J. Shah, Study of Various Types of Faults in HVDC Transmission System, in International Conference on Global Trends in Signal Processing, Information Computing and Communication ICSPICC (Technically Sponsored by IEEE Bombay Section), Proceeding, (2016)
H. Batra, R. Khanna, Study of various types of converters station faults, Int. J. Eng. Res. Technol. (IJERT) 2(6), 3288–3293, (2013)
W. Leterme, D. Hertem, Classification of fault clearing strategies for HVDC grids (Lund, Cigre, 2015)
IEEE standard 141-1993: Recommended practice for power distribution in industrial plants
IEEE Standard 1159-1995: Power quality monitoring standards
P. Kundur, Power system stability and control (McGraw-Hill, New York, 1994)
Silvano Casoria, “Discrete HVDC Controller”, Power Systems Simulation Laboratory, IREQ, Hydro-Quebec
A. Usman, M. Kutay, E. Tuncay, MATLAB/SIMULINK model for HVDC fault calculations, (2019). https://doi.org/10.1109/acemp-optim44294.2019.9007154
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Durgaprasad, S., Nagaraja, S., Modi, S. (2022). HVDC Fault Analysis and Protection Scheme. In: P., S., Prabhu, N., K., S. (eds) Advances in Renewable Energy and Electric Vehicles. Lecture Notes in Electrical Engineering, vol 767. Springer, Singapore. https://doi.org/10.1007/978-981-16-1642-6_18
Download citation
DOI: https://doi.org/10.1007/978-981-16-1642-6_18
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-1641-9
Online ISBN: 978-981-16-1642-6
eBook Packages: EnergyEnergy (R0)