
Abstract
A complex issue in handling systems with continually changing processing demands is an intractable task. A more current example of these systems can be observed in wireless sensor networks and traffic-intensive IoT networks. Thus, an adaptive framework is desired which can handle the load and can also assist in enhancing the performance of the system. In this paper, our objective is to provide the non-stationary solution of Erlang loss queueing model where s servers can serve at most s jobs at a time. We have employed time-dependent perturbation theory to obtain the probability distribution of M/M/s/s queueing model. The time-dependent arrival and service rates are assumed to be in sinusoidal form. The opted theory gives approximation for probability distribution correct up to first and second order. The result shows that first- and second-order approximations provide better approximation than the existing ones.
Amit Kumar Singh was a Ph.D. student at JNU, New Delhi.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Erlang loss queueing model
- Non-stationary queues
- Blocking probability
- Time-dependent perturbation theory
1 Introduction
Queueing system is an important tool for designing and analyzing the systems ranging from IOT, blockchain technology to telecommunication systems [1,2,3]. Suitable queueing models have been designed for different systems. Erlang loss queueing model is applicable in many domains like telecommunication networks, transportation systems, etc. [5, 6]. Such systems are designed better and analyzed on the basis of their performance measures. In order to evaluate performance measures, the systems are assumed to be in a steady state. Based on this assumption, the systems are analyzed. The reason for this assumption is that stationary solutions are easy to obtain. However, in reality, the systems are not in steady state and steady-state solutions are far from reality. The arrival and service rates are not constant; rather, they are a function of time. For instance, the pattern of calls or vehicles on road is different in morning and in evening [7, 8]. The non-stationary solutions of the queueing models are difficult to obtain. So, the researchers are trying to obtain approximations [6, 7]. Several approximations have been found in the literature to approximate and analyze the non-stationary queueing systems. Some of these are simple stationary approximation (SSA), pointwise stationary approximation (PSA), modified offer load (MOL), etc [9,10,11,12,13]. The arrival and service rates are assumed to be in sinusoidal form to test these approximations. In this paper, we have opted time-dependent perturbation (TDP) theory, extensively used to solve numerous problems of quantum mechanics [13,14,15]. TDP is applied on the non-stationary Erlang loss model with time-varying arrival and service rates. The sinusoidal rates are generally used so that we can accurately estimate the performance of the approximation scheme, although this method can also be applied for general perturbed rates.
The rest of the chapter is as follows: After the introduction section, Sect. 2 presents a literature review of non-stationary queues. Section 3 provides Erlang loss model and its CR equations. Time-dependent perturbation theory is briefly discussed in Sect. 4. Section 5 presents numerical results. The last section is the conclusion.
2 Literature Review
Non-stationary queueing models developed for analyzing the systems are complex in nature [13]. Simulation techniques can predict the behavior of the queueing models but these techniques, for example, Monte Carlo simulation, take more computational power as well as time. People choose approximation methods based on steady-state results to predict the behavior of systems. These approximations are much easier and require less computation. Simple stationary approximation (SSA) is one of the techniques based on steady-state solution. The average rate is calculated over a time interval and inserted in steady-state formula. Mathematically, the average arrival rate (similarly average service rate) over a time of length T is given by:
All Markovian queues can be evaluated by using these average arrival rates. However, SSA method ignores non-stationarity behavior and provides stationary solution for the number of jobs in the system. Green et al. [10] found that SSA gives a reasonable approximation if the arrival rate function varies by only 10% about its average arrival rate. Green et al. [10] proposed pointwise stationary approximation (PSA) method used to compute non-stationary behavior. PSA provides time-dependent behavior based on steady-state behavior of a stationary model. It uses arrival and/or service rate that prevails at the time at which we want to describe the performance. For example, the blocking probability \(P_B(t)\) which is the probability that no server is available is calculated approximately for M(t)/M(t)/s/s queue as:
where \(\rho (t) = \uplambda (t)/\mu (t)\)
The expected number of busy servers E[S(t)] can be given approximately as
Massey and Whitt [12] showed that PSA is asymptotically correct as arrival rate changes less rapidly. Modified offered load (MOL) model was introduced to approximate telephone traffic [12]. MOL is applicable to only Erlang loss models and works effectively if the blocking probability is small.
3 Erlang Loss Model
Consider a queueing system with s number of servers and with zero buffer size. That is, there can be at most s jobs in the system that are under service. The arrival pattern follows Poisson process with a non-negative time-varying rate \(\uplambda (t)\). The service of each job follows exponential distribution with rate \(\mu (t)\). Let p(n, t) be the probability of n jobs in the system at time t. The Chapmann–Kolmogorov (CR) equations for M(t)/M(t)/s/s queueing system [5] are given:
The non-autonomous linear differential equation in matrix form of above set of CR equations can be written as:
where
and M(t) be a matrix obtained from the set of differential equations. The solution of Eq. (2), if M(t) is constant (\(M(t)=M_0\)), can easily be obtained by matrix differential equation with constant coefficients. If the initial condition p(n, 0) is known, then the solution is given by
where \(b_i\) is the eigenvalue and \(m_i\) is the corresponding eigenvector of \(M_0\) and coefficients \(a_i\) can be easily obtained by the initial probability values. However, if the entries of matrix M(t) in Eq. (2) are time-dependent, then it is complex to obtain the exact solution. For solving the differential Eq. (2), researchers proposed a different method. For the support of their method, researchers assumed that the time-varying rates are periodic in sinusoidal form [12]. But, these methods can also be applied on general rates. In the light of this assumption [13], we assume that the time-varying rates can be split into two parts: a constant and some perturbed part. The perturbation part of the rates is in sinusoidal form. Formally, the rates can be written as
The matrix M(t) thus can be seen as a sum of two matrices \(M_0\) and X(t) where \(M_0\) is constant and X(t) is sinusoidal form.
4 Time-Dependent Perturbation (TDP) Theory
The matrix differential equations with time-dependent coefficients are generally found in quantum mechanics, for instance, the Schrodingers wave equation with time-dependent Hamiltonian [14,15,16]. TDP theory has been very successful in computing the solution of such problems. Equation (2) can be rewritten where the coefficient matrix is the sum of constant and perturbed part, i.e.,
In case of M(t) as constant, the solution of Eq. (4) as discussed in the previous section is given by
In a similar fashion, if the coefficient matrix as given in Eq. (4) is time-dependent, the unknown coefficients \(a_n\) must be a(n, t). The general solution of Eq. (4) can be written as
Substituting the value of P(t) given in Eq. (6) into (4) and simplifying it, we have
If \({m_j}'\) is left eigenvector corresponding to eigenvalue \(b_j\) and \(m_i\) is right eigenvector corresponding to \(b_i\), then \({m_j}'m_i\ne 0\), if \(i=j\), otherwise 0 [17]. So, we multiply reduced Eq. (7) by \({m_j}'\) from left-hand side
where \(X_{ij}={m_j}'X(t){m_i}\).
The term a(i, t) can be expanded in the power of c as a perturbation approximation
Using this expression into Eq. (8) and on equating the coefficients of equal power of c, one can obtain
The first-order coefficients are evaluated by
Similarly, higher-order coefficients can be calculated using
The zeroth-order coefficients a(n, 0) are obtained from initial condition
which is given in the problem. The first-order coefficients can be obtained by using zeroth-order coefficients. The higher-order coefficients can be obtained in the same manner [17,18,19].

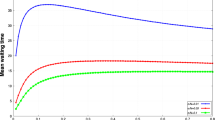
Average number of customers in M(t)/M/5/5. (\(\uplambda =10+7{\text {sin}}(2t),\mu =2\))
5 Numerical Results
In this section, we implemented TDP method on Erlang loss model. The results obtained from TDP(correct up to first and second order), MOL and PSA are compared with the solution obtained by the ode45 function available in MATLAB ODE suit. The relative error RE of the existing and TDP methods is computed to get insights by
We take M(t)/M(t)/5/5 queue as an instance to gain insight on how the solution based on TDP correct up to first and second order performs. We take arrival rate
and service rate \(\mu (t)=4\). In Fig. 1, we can easily see that TDP (second-order approx.) performs better than the other approximations (PSA, MOL, TDP (first-order approx.)). Figure 2 shows the relative error of PSA, MOL, TDP (first-order and second-order approx). For better clarity, Fig. 3 shows only the relative error of only MOL and TDP (second-order approx). From Figs. 2 and 3, it can be easily seen that the TDP method outperforms the other existing methods.

Relative error of TDP(second approx.) (\(\uplambda =10+7{\text {sin}}(2t),\mu =2\))

Relative error of TDP(second approx.)(\(\uplambda =10+7sin(2t),\mu =2\))
6 Conclusion
In this chapter a time-dependent perturbation theory is used for computing probability distribution and blocking probability for non-stationary Erlang loss model. The scope of this study covers a plethora of systems with dynamic organization. The numerical results show that the opted theory outperforms the existing approximations. The theory can be applied extensively to obtain approximations for various non-stationary queueing models.
References
Rivera D, Cruz-Piris L, Lopez-Civera G, de la Hoz E, Marsa-Maestre I (2015) Applying an unified access control for IoT-based intelligent agent systems. In: 2015 IEEE 8th international conference on service-oriented computing and applications (SOCA), pp 247–251
Said D, Cherkaoui S, Khoukhi L (2015) Multi-priority queuing for electric vehicles charging at public supply stations with price variation. Wirel Commun Mobile Comput 15(6):1049–1065
Yan H, Zhang Y, Pang Z, Da Xu L (2014) Superframe planning and access latency of slotted MAC for industrial WSN in IoT environment. IEEE Trans Ind Inform 10(2):1242–1251; Strielkina A, Uzun D, Kharchenko V (2017) Modelling of healthcare IoT using the queueing theory. In: 2017 9th IEEE international conference on intelligent data acquisition and advanced computing systems: technology and applications (IDAACS), vol 2
Ozmen M, Gursoy MC (2015) Wireless throughput and energy efficiency with random arrivals and statistical queuing constraints. IEEE Trans Inf Theory 62(3):1375–1395
Shortle JF, Thompson JM, Gross D, Harris (2008) Fundamentals of queueing theory. Wiley, C. M
Abdalla N, Boucherie RJ (2002) Blocking probabilities in mobile communications networks with time-varying rates and redialing subscribers. Ann Oper Res 112:15–34
Worthington DJ, Wall AD (2007) Time-dependent analysis of virtual waiting time behaviour in discrete time queues. Euro J Oper Res 178(2):482–499
Pender J (2015) Nonstationary loss queues via cumulant moment approximations. Prob Eng Inform Sci 29(1):27–49
Alnowibet KA, Perros HG (2006) The nonstationary queue: a survey. In: Barria J (ed) Communications and computer systems: a tribute to Professor Erol Gelenbe, World Scientific
Green L, Kolesar P (1991) The pointwise stationary approximation for queues with nonstationary arrivals. Manage Sci 37(1):84–97
Alnowibet, Perros (2009) Nonstationary analysis of the loss queue and of queueing networks of loss queues. Euro J Oper Res 196:1015–1030
Massey WA, Whitt W (1997) An analysis of the modified offered-load approximation for the nonstationary loss model. Ann Appl Prob 4:1145–1160
Massey WA (2002) The analysis of queues with time-varying rates for telecommunication models. Telecommun Syst 21:173–204
Gottfried K, Yan TM (2013) Quantum mechanics: fundamentals. Springer Science & Business Media
Griffiths DJ (2016) Introduction to quantum mechanics. Cambridge University Press
Bransden BH, Joachain (2006) Quantum mechanics. Pearson Education Ltd., C. J
Singh AK(2015) Performance modeling of communication networks: power law behavior in stationary and non-stationary environments, thesis. Thesis submitted to JNU, New Delhi
Dilip S, Karmeshu (2016) Generation of cubic power-law for high frequency intra-day returns: maximum Tsallis entropy framework. Digital Signal Process 48:276–284
Tanmay M, Singh AK, Senapati D (2019) Performance evaluation of wireless communication systems over weibull/\(q\)-lognormal shadowed fading using Tsallis’ entropy framework. Wirel Pers Commun 106(2):789–803
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Singh, A.K., Senapati, D., Bebortta, S., Rajput, N.K. (2021). A Non-stationary Analysis of Erlang Loss Model. In: Panigrahi, C.R., Pati, B., Mohapatra, P., Buyya, R., Li, KC. (eds) Progress in Advanced Computing and Intelligent Engineering. Advances in Intelligent Systems and Computing, vol 1198. Springer, Singapore. https://doi.org/10.1007/978-981-15-6584-7_28
Download citation
DOI: https://doi.org/10.1007/978-981-15-6584-7_28
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-6583-0
Online ISBN: 978-981-15-6584-7
eBook Packages: EngineeringEngineering (R0)