
Abstract
This paper presents an experimental approach for crack identification in an overhung rotor system supported on rigid bearings. The existence of coupling phenomena between bending and lateral vibration due to the presence of crack is used for the identification of crack in an overhung rotor system. The natural frequency of the rotor system has been obtained using impact hammer analysis and compared with the finite element analysis. The crack identification procedure involves the application of external axial excitation through a thrust shaker. The overhung rotor system is excited axially through a shaker with frequency equal to its first natural frequency and subharmonic of first natural frequency obtained through impact modal analysis. The response measured in the lateral and radial direction shows that there is a difference in the amplitude of the external excitation frequency and its harmonics measured for crack and healthy rotor system. The lateral response has more amplitude peaks at excitation frequency and its harmonic for cracked rotor when excited with frequency equal to the first natural frequency and its subharmonic. The peaks are more prominent for subharmonic of first natural frequency as external excitation. A considerable difference in the amplitude of X and 2X components can be seen in radial response for cracked rotor and healthy rotor when excited with frequency equal to the first natural frequency and its subharmonic. The application of external harmonic excitation with frequency equal to first natural frequency and its subharmonic can be very well used for crack detection in overhung rotor system without stopping it.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Rotors faults detection has been a hard task for all personals whether through modelling approach or experimental approach. Shaft crack is one of the faults present in the rotor system which has a very negligible effect on the shaft stiffness which makes it very difficult to detect. However, this negligible change in the stiffness can prove to be catastrophic for rotors in running condition. It becomes necessary to detect crack in the rotor system in its running condition so that proper measures can be adopted to avoid any kind of machinery failure. The crack detection took attention in the later 1960s. Many researchers started to analyse the behaviour of the cracked shaft through modelling approach. Through studies, it was found that coupling is present between bending and longitudinal or lateral vibration due to the presence of crack. The presence of coupling in the cracked shaft can be used as phenomena for detection of small open cracks [1,2,3]. Researchers have focused on the model-based approach providing review work and concluding that vibration analysis can be used as a great tool in detection of cracks and other faults in the rotor system [4]. Jeffcott rotor model is utilized by almost all researches to carry out their study. A famous model known as the fault model in which the loads known as equivalent loads are supposed to be acting on the healthy model to study the dynamic behaviour of the faulty rotor system [5]. A brief review on the types of cracks and its detection methods has been presented for the safety of rotating machinery [6].
The experimentation work also gained its importance in analysing the effect of the orientation angle and depth of the crack. It was found that higher harmonics start to appear in the response spectrum due to the presence of crack as the shaft passes through its critical speed. The 2X vibration component can be effectively used for possible detection of cracks in the rotor system [7, 8]. The appearance of 2X vibration component in the vibration spectrum can be due to other reason as well such as misalignment, which makes it difficult to rely only on 2X component for the detection of crack. This lead to requirement of some other method such as application of external forces for crack detection along with studying the orbit plot behaviour of the rotor system [9, 10]. It was proved through modelling and experimental approach that the 2X and 3X vibration components can be utilized to presence of crack as the rotor passes through half and one third of its critical speed [11,12,13]. The natural frequencies play to be of great importance for crack detection as there is change in the stiffness and hence dynamic behaviour of the rotor system [14]. Studies have also been performed on shaft with slant crack showing that along with coupling stiffness, there is bending–torsion coupling also present due to the crack and the appearance of rotating speed and the torsional excitation combination frequencies in the response spectrum can be used to detect the slant crack in the rotor system [15]. Many model-based methods developed by researchers have been compared with the experimental results. The main theory behind these model based methods is modeling of breathing crack function for the crack element. A new methodology presented in [16] modeled breathing function as Fourier series considering weight dominance of the shaft. The coefficients of the breathing crack function in Fourier series are estimated from the amplitude of the harmonic response obtained experimentally, since response amplitude depend on breathing crack function.
Till date almost all the work performed is for the rotor supported at the ends. There is a need to pay attention for overhung rotor system as there are many applications where the rotor acts as an overhung system i.e. the rotor carries a disc/fan beyond the bearing support. One of such kind of the researches is performed on overhung rotor system in which the shaft is carrying the disc beyond the bearing support. The unbalance forces due to rotors weight (gravity effect) and disc skew is considered for analysis purpose [17]. The motive of this paper is to study and suggest new experimental approach for crack detection in overhung rotor system which can be utilized for online crack diagnosis without stopping the machinery.
2 Equations of Motion
The modelling of a cracked overhung rotor system with shaft diameter D and length L carrying disc of mass m can be done with co-ordinate system which is attached to the rotor and rotate with it. Since crack induces asymmetry in the rotor system it is irrelevant whether to model the cracked rotor system with fixed or rotating co-ordinate system. It is always easier to work with the coordinates which are attached to the rotor and rotates with it for a cracked rotor system.
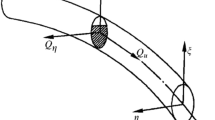
The crack induces asymmetry in the rotor system. The application compressive axial impulses generate transverse forces Qv, Qw and axial force Qx (Fig. 1) which induce high-frequency axial vibrations and stress on the crack edge. The total stress due to these forces is calculated using fracture mechanics theory. The total stress intensity factor Kt is given as [1, 18]:

Forces acting crack cross section [3]
where KQv, KQw and KQx are the stress intensity factor due to forces Qv, Qw and Qx, respectively.
The crack causes a reduction in the stiffness of the rotor system, inducing an additional flexibility gi to the rotor system which is added to the flexibility of uncracked shaft to get the total flexibility of the system. The additional flexibility due to the crack is given as [18]:
where J(α) is the strain energy density function given by:
The corresponding stiffness matrix K is obtained by inverting the flexibility matrix obtained using Eq. 2. Thus,
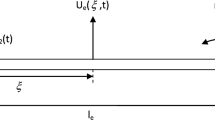
Figure 2 shows the co-ordinate system used for the modelling the overhung rotor. The co-ordinates, x, y and z, represent the stationary axes, while v and w represent the rotating axes. The eccentricity of the centre of disc mass m from disc centre is given by ε with orientation β from v-axis in the direction of shaft rotation. θ represents the instantaneous angle of rotation. The shaft speed is ω with damping coefficient c. \(k_{v} ,k_{w} ,k_{x}\) are the stiffness in v, w and x directions, respectively, and \(k_{vw} ,k_{wv} ,k_{vx} ,k_{xv} ,k_{wx} ,k_{xw}\) are cross-coupled stiffness due to the crack. The shaft stiffness of healthy shaft is ko. The equations of motion for an overhung rotor system with cross-coupling coefficients due to the crack are given as [3]:

Co-ordinate system for crack cross section [3]
The above equations are in non-dimensional form with the following non-dimensional terms:
where
3 Experimental Set-up
The physical dimensions of the rotor system corresponds to the Machinery Fault system–Rotor Dynamics system (MFS-RDS) supplied by Spectra Quest (Table 1). The rotor system consists of two discs as shown in 3-D model Fig. 3. The crack present in the shaft is shown in Fig. 4. The shaft is made of TGP steel and discs are made of Aluminium. A schematic diagram of experimental set-up is shown in Fig. 5. A shaft (S1) carrying two discs (D1) and (D2) are supported by journal bearings (B1) and (B2). The Dytran LIVM accelerometer 3055B4 (A) is placed on bearing (B2) for getting the lateral and radial response of the system. The excitation is provided through stinger (S2) attached to a shaker. The modal analysis is done using dytran impact hammer with hard plastic tip.

3D model of the rotor system

Crack in shaft

Block diagram of the experimental set-up, C—coupling, B1—bearing housing 1, S1—shaft, d1—disc 1, a—accelerometer, B2—bearing housing 2, D2—disc 2, S2—stinger
4 Simulation and Experimental Results
The numerical simulation for free vibration analysis is done through Finite Element Method (FEM) for validation purpose. The overhung rotor system is divided into 24 elements as shown in Fig. 6. Crack is present in element number 17. The stiffness for cracked element is calculated using Eq. 4. Equations of motion for an overhung rotor system are then integrated using MATLAB [19]. Table 2 provides the comparison for simulation and experimental natural frequency. Figure 7 shows the first three mode shapes of the rotor system obtained through simulation. Since the rotor system is lightweight, only the first three natural frequencies are studied.

FEM model of overhung rotor system

Numerical mode shapes
The experimental work consists of studying the free vibration response of the system followed by the application of the external excitation to the running rotor for detection of cracks. The free vibration response is studied through impact hammer analysis. Dytran dynapulse impulse hammer 5800B4 with hard plastic tip is used for impact analysis. The first three natural frequency of the system obtained experimentally is shown in Fig. 8. The first natural frequency ωf is found to be 44 Hz.

Experimental modal analysis result
The rotor is running at a constant speed (ω) of 1200 RPM. The excitation to the rotor is given in axial direction through the Labworks Inc. MT-161 electrodynamic shaker. The external excitation frequency is ωe1 which is equal to the first natural frequency and ωe2 which is equal to the subharmonic of the first natural frequency. The response is measured in lateral and radial direction. The comparison of the response between healthy and crack rotor system are shown in Figs. 9, 10, 11 and 12. The blue graph is for the healthy rotor and the red graph is for the cracked rotor. It is evident from all the figures that the response of cracked shaft has more 2X component peak than that for the healthy shaft; however, 2X component may also appear due to the presence of unbalance in the system. The identification of crack therefore needs a more robust method. The application of external excitation through a shaker induces some additional peaks for the cracked shaft which can be easily distinguished from that of healthy shaft. Figures 9 and 10 show the comparison of response for healthy and crack shaft in lateral and radial directions, respectively, subjected to external excitation frequency ωe1. The lateral response for crack shaft when subjected to external excitation frequency ωe1, has ωe1 component and its harmonics present along with the 3X component (Fig. 9), while the radial response for the crack shaft has 1X, 2X, 3X and 8X components present in the response spectrum in comparison to that of the healthy shaft (Fig. 10).

Blue graph—healthy shaft, red graph—crack shaft, response direction—lateral, ω = 20 Hz, ωe1 = 44 Hz (data 3)

Blue graph—healthy shaft, red graph—crack shaft, response direction—radial, ω = 20 Hz, ωe1 = 44 Hz (data 3)

Blue graph—healthy shaft, red graph—crack shaft, response direction—lateral, ω = 20 Hz, ωe2 = 22 Hz (data 4)

Blue graph—healthy shaft, red graph—crack shaft, response direction—radial, ω = 20 Hz, ωe2 = 22 Hz (data 4)
Figures 11 and 12 show the comparison of response for healthy and crack shaft in lateral and radial directions, respectively, subjected to external excitation frequency ωe2. The lateral response for the crack shaft when subjected to external excitation frequency ωe2 has peaks at various harmonics of ωe2 (Fig. 11), while the radial response for the crack shaft has 1X and 2X components present in the response spectrum in comparison to that of the healthy shaft (Fig. 12).
5 Conclusions
This paper presents an experimental approach to detect crack in an overhung rotor system using external excitation through a shaker. Responses are measured in lateral and radial direction. The lateral response has more amplitude peaks at excitation frequency and its harmonic for cracked rotor when excited with frequency equal to the first natural frequency and its subharmonic. The peaks are more prominent for subharmonic of first natural frequency as external excitation. A considerable difference in the amplitude of X and 2X components can be seen in radial response for cracked rotor and healthy rotor when excited with frequency equal to the first natural frequency and its subharmonic. The application of external harmonic excitation with frequency equal to first natural frequency and its subharmonic can be very well used for crack detection in overhung rotor system without stopping it.
References
Papadopoulos CA, Dimarogonas AD (1987) Coupled longitudinal and bending vibrations of a rotating shaft with an open crack. J Sound Vib 117(1):81–93
Papadopoulos CA, Dimarogonas AD (1992) Coupled vibration of cracked shafts. J Vib Acoust 114(4):461–467
Darpe AK, Chawla A, Gupta K (2002) Analysis of the response of a cracked Jeffcott rotor to axial excitation. J Sound Vib 249(3):429–445
Edwards S, Lees AW, Friswell MI (1998) Fault diagnosis of rotating machinery. Shock Vib Dig 30(1):4–13
Sabnavis G et al (2004) Cracked shaft detection and diagnostics: a literature review. Shock Vib Dig 36(4):287
Jain JR, Kundra TK (2004) Model based online diagnosis of unbalance and transverse fatigue crack in rotor systems. Mech Res Commun 31(5):557–568
Tong Z et al (2005) Experimental analysis of cracked rotor. J Dyn Syst Meas Contr 127(3):313–320
Itzhak G, Casey C (2003) Crack detection in a rotor dynamic system by vibration monitoring: Part I—Analysis. In: ASME Turbo Expo 2003, collocated with the 2003 international joint power generation conference, ASME
Yukio I, Inoue T (2006) Detection of a rotor crack using a harmonic excitation and nonlinear vibration analysis. J Vib Acoust 128(6):741–749
Gasch R (2008) Dynamic behaviour of the Laval rotor with a transverse crack. Mech Syst Signal Process 22(4):790–804
Sinou J (2008) Detection of cracks in rotor based on the 2× and 3× super-harmonic frequency components and the crack–unbalance interactions. Commun Nonlinear Sci Numer Simul 13(9):2024–2040
Sinou J (2009) Experimental response and vibrational characteristics of a slotted rotor. Commun Nonlinear Sci Numer Simul 14(7):3179–3194
Guo C, Jihong Y, Weicheng Y (2017) Crack detection for a Jeffcott rotor with a transverse crack: an experimental investigation. Mech Syst Signal Process 83:260–271
Grzadziela A (2009) Rotors fault detection using vibration methods. Transp Probl 4(3), cz. 2:35–44
Lin Y, Fulei C (2010) The dynamic behavior of a rotor system with a slant crack on the shaft. Mech Syst Signal Process 24(2):522–545
Friswell MI et al (2016) Identification of breathing cracked shaft models from measurements. In: Rotating machinery, hybrid test methods, vibro-acoustics & laser vibrometry, vol 8. Conference proceedings of the society for experimental mechanics series. Springer, Cham pp 537–543
Tiaki MM, Hosseini SAA, Zamanian M (2016) Nonlinear forced vibrations analysis of overhung rotors with unbalanced disk. Arch Appl Mech 86(5):797–817
Tada H, Paris PC, Irwin GR (1973) The stress analysis of cracks. Del Research Corp, Hellertown PA
Friswell MI, Penny JET, Garvey SD, Lees AW (2010) Dynamics of rotating machine. Cambridge University Press
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Tamrakar, R., Mittal, N.D. (2020). Crack Detection in an Overhung Rotor System Using External Harmonic Excitation. In: Dutta, S., Inan, E., Dwivedy, S. (eds) Advances in Rotor Dynamics, Control, and Structural Health Monitoring . Lecture Notes in Mechanical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-15-5693-7_12
Download citation
DOI: https://doi.org/10.1007/978-981-15-5693-7_12
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-5692-0
Online ISBN: 978-981-15-5693-7
eBook Packages: EngineeringEngineering (R0)