
Abstract
The purpose of this paper is development of hull form design system which can optimize both propulsive performance and cargo capacity, utilizing automatic design tool of engine room and cargo hold arrangement, and high-fidelity evaluation tool for propulsion performance. The present system is developed based on 3D CAD system, NAPA, coupling with RaNS equation based CFD solver, Neptune. In this system, engine room arrangement is automatically designed considering hull form shape and structural members to keep the clearance for workers and deck space for installation of auxiliary engines. After deciding the position of the bulkhead from the engine room arrangement, the cargo hold is also automatically designed to maximize cargo capacity. Hull form transformation is performed using FFD technique that facilitates maintaining the smoothness of the deformed hull form. Demonstration of the present design system with 62,000-deadweight class bulk carrier, shows very promising results for the holistic design of hull form. Comparing to the convectional manual design study, the proposed system enables to present dozens of optimal design results in wide range like as an optimal surface in design range. Furthermore, this optimal surface helps the designer to understand effective limits of design parameters. As a result, the present system can help designer’s high-level decision making.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Demands for advanced hull from design is growing continuously. In hull form design, computational fluid dynamics (CFD) based hull form optimization, which is called Simulation Based Design (SBD), is widely accepted. In the past decades, SBD has been widely studied in hull form optimization research for propulsive performance. Those works were successfully demonstrated SBD ability and effectiveness for hull form optimization in propulsive performance (for example [1], [2]).
Meanwhile, from January 2013, regulations by Energy Efficiency Design Index (EEDI) began to be implemented. EEDI is one of the indicators to evaluate transportation efficiency. Hence, it is becoming increasingly important that the hull form design focusing on transportation efficiency. Transport efficiency is an index calculated from propulsion performance and cargo capacity (deadweight). Maximizing propulsion performance and maximizing cargo capacity at the same time are generally in a trade-off relationship. Therefore, we need to apply multi-objective optimization technique for hull form design aiming at maximizing EEDI.
Those interdisciplinary multi-objective optimizations are called total (holistic) ship design. The focus of conventional studies is to determine the principal dimension of ships (for example [3]). These studies use simplified formulas in evaluation of hull form. For example, in the propulsion performance evaluation, the propulsive performance is evaluated using the Holtrop’s method [4] or regression formula of original database of towing-tank results (for example [5]), which is defined propulsion performance by principal dimension of hull form such as ship length or block coefficient (CB). In addition, cargo capacity is also evaluated by empirical formula defined by principal dimension. Although these results are effective for determining the principal dimension, it is unsuitable for detailed design of hull from. The hull form optimization that determines the principal dimension is called global concept design and is distinguished from local geometry optimization [6]. In recent years, since 3D CAD (Computer-Aided Design) system has become popular at the design site, local geometry optimization using these CAD data is more important.
In recent years, the HOLISHIP Project [7], which focus on holistic (total optimization) design of ships, has been underway as a European project since 2013. In this project, the 3D CAD system is highly coordinated with various performance evaluation tools. We are aiming for the holistic design of the ship, and the focus of our research is exactly there. In this project, several hull design demonstrations are being conducted, and permissive results are obtained [8,9,10]. These demonstrations focus more on global concept optimization. However, local geometry optimization is also important, such as stern hull form design considering the clearance between the main engine and structural member for workers. In hull form optimization aimed at EEDI, the increase in cargo capacity (deadweight) is important. In bulk carriers and tanker, the shapes of the main machine room, especially the length in the longitudinal direction, has a particularly strong influence on the cargo capacity. Therefore, in stern-shaped local geometry optimization, multi-objective optimization of propulsion performance and Cargo capability for changes in main machine room shape is important. Nevertheless, little studies has been done to local geometry optimization with holistic design.
The purpose of this paper is development of hull form design system which can optimize both propulsive performance and cargo capacity utilizing high fidelity CFD and 3D CAD model to consider cargo hold and main engine arrangement. The present system is developed based on 3D CAD system, NAPA [11], coupling with Reynolds-averaged Navier Stokes (RaNS) equation based CFD solver, Neptune. Utilizing NAPA system, Engine room arrangement is automatically designed considering space for pedestrian passage between main web frame and main engine 3D form imported as iges format in advance. After deciding the position of the bulkhead from the main engine room arrangement, the cargo hold is also automatically designed to maximize cargo capacity. Hull form transformation is performed using Free Form Deformation (FFD) technique that facilitates maintaining the smoothness of the deformed hull form. Furthermore, demonstration with 62,000 deadweight class bulk carrier, called NMRI-N-BC is also performed to discuss the effectiveness of the present system.
2 Overview of the Design System
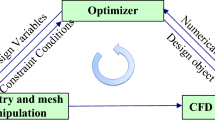
The present system is characterized by automatically designing engine room arrangement and evaluating their propulsion performance and cargo capacity with high accuracy. Figure 1 shows a flow chart of present optimization system. Firstly, hull form is transformed by FFD technique. Based on the deformed hull form, engine room and engine room bulkhead (BHD) is automatically designed with constraints. Finally, propulsive performance and cargo capacity are evaluated and optimized.

A flow chart of present optimization system and calculation time.
One of the advantages of the present system is increase of the total value of the ship, such as EEDI. In addition, reducing of design time due to reduction of redesign effort can be also emphasized (Fig. 2). Those advantages of the present system can be achieved by using high-fidelity evaluation method, comparing to the empirical formula.

One of the advantages of total optimization design.
2.1 Hull Form Transformation (Geometry Manipulation)
The hull form transformation (geometry manipulation) is taken by Free Form Deformation (FFD) in the present study. Figure 3 shows an example of a bulbus bow transform by FFD. In the FFD, a box is defined in the deformation space, and then some vertices of the box are moved to realize desired transformation of the hull form. Along with this deformation of the box, the inner hull form is also deformed. The feature of FFD is its high degree of freedom of deformation and smoothness of the deformed hull surface. By proper definitions of the boxes, it is possible to achieve various transformations such as deformation of frame line, cross sectional area curve, position of the buoyancy and so on.

An FFD example for bulbus bow transformation.
2.2 Automatic Main Engine Room Arrangements
The present system can design the main machine room with some constraints automatically. Figure 4 shows an overview of automatic main engine room design. The position of the main engine is optimized considering hull form shape and structural members to keep the clearance for workers and installation space for auxiliary engines and pipes. The main engine shape is handled as 3D CAD data, and basic shapes of web frames which is structural members can be defined by designer. The 2nd and 3rd deck’s area is automatically kept in order to ensure the installation space for auxiliary engines and pipes. To achieve those automatic design, iteration of design is necessary in this step.

Overview of automatic main engine room design.
2.3 CFD Method and Propulsive Performance Evaluation
Propulsion performance of deformed hull form is evaluated by RaNS equation based CFD solver Neptune developed at NMRI [12], for which validation and verification with towing tank test and full-scale measurements [13] has been carried out for many years. Calculation conditions in the present study is design ship speed in full load condition at model scale Reynolds number (Re = 5.0 × 106). The turbulence model used in the present work is modified Spalart-Allmaras (MSA) one-equation model [14] without wall function. An arbitrary constant parameter, Cvor in MSA set as 10 in all cases of the present work. The presence of rotating propeller is represented by simplified body-force model based on an infinitely bladed-propeller theory [15]. The calculation grids of basic hull forms without any appendages at full-load and even-keel were generated with HO topology, 1.8 million cells (\( {\text{i}} \times {\text{j}} \times {\text{k}} = 169 \times 129 \times 81 \): both sides), 1.5 million cells (\( {\text{i}} \times {\text{j}} \times {\text{k}} = 169 \times 113 \times 81 \): both sides) for free surface and double model calculation cases, respectively. A double model assumption is applied only to self-propulsion simulations. The empirical correlations, analyzed from towing tank results, are adopted to CFD result to ensure powering results. Evaluation of propulsion performance in full-scale is based on the normal powering method from the towing tank test results in NMRI.
2.4 Automatic Cargo Holds Design and Capacity Evaluation
The objective of the cargo holds design is maximize the cargo capacity. The present system automatically design cargo hold 3D shapes considering hull form and based on bulk head position defined above mentioned steps. By those 3-dimensional design approach, the accurate evaluation of cargo capacity is achieved in this system.
3 Demonstration Case
The target ship for demonstration of the present system is 62,000 deadweight class bulk carrier, called NMRI-N-BC. The ship has principal dimensions on Table 1, where Lpp: ship length, B: ship breadth, D: ship depth, d: design draft and Vs: design speed. The objectives are propulsion performance and cargo capacity.
3.1 Parametric Hull Form Deformation
The hull form deformation is parametrized by Blending Factor (BF) of FFD. In the present demonstration, the original hull form is deformed by following parametrized FFD.
-
1.
Sectional area curve (CP curve)
-
a.
LCB: position of longitudinal center of buoyancy, Fig. 5.
Fig. 5. 
FFD in LCB (top: LCB to aft, BF −2.0; bottom: LCT to fore, BF 3.0)
-
b.
AFT CP curve: CP curve trend in aft-part (Whether the weight is placed on the midship side or on the aft side), Fig. 6.
Fig. 6. 
FFD in AFT CP curve (top: aft heavy, BF −0.5; bottom: midship heavy, BF 2.0).
-
a.
-
2.
Sectional frame line shape (generally called U-type and V-type), Fig. 7.
Fig. 7. 
FFD in sectional frame line shape (left: U-type, BF 2.0; right: V-type, BF −2.0).



Constrains of the present demonstrational optimization is displacement, clearance between main engine and web frame and area of 2nd and 3rd deck.
3.2 Result and Discussion
Response surfaces of the objectives of cargo capacity and propulsive performance (Delivered horse power at design speed: DHP) are shown in Fig. 8 and Fig. 9, respectively. The represented design parameters are LCB and AFT CP curve. From the results, to increase hold volume of the target ship, the LCB is placed to more aft side, and the trends of CP curve is weight more on stern side. This is because the main engine can be arranged more aft side by placing the displacement on the stern side. Thus, by moving the engine bulk head to stern side, the cargo space increased. On the other hand, to improve the propulsion performance, the LCB must be arranged to the forward, which is opposite to the direction mentioned above. Hence, there is a trade-off relationship between propulsive performance and hold volume in this demonstration case of design.

Response surface of cargo capacity.

Response surface of propulsive performance.
Multi-objective optimization results are shown in Fig. 10. A Pareto solution maximizing propulsion performance and cargo capacity is found with the present system. The multi-objective optimization in the present demonstration has succeeded because a hull form better than original is found in terms of the cargo capacity and propulsive performance.

Multi-objective optimization results
In this research, we discuss the ship type of red and blue ▽ hull form among Pareto solutions in Fig. 10. Figure 11 shows the lines of red and blue hull forms compared with the original hull form. The blue hull form is superior in propulsive performance. And this blue hull form has displacement on the bow side, and V-type frame lines. On the other hand, the red hull form has both better propulsive performance and larger hold volume. This hull form has U-shaped frame lines.in this respect, the present system enables multi-objective optimization of hull form interdisciplinary.

Comparison of hull forms on the pareto front comparing to original hull form.
In addition, in Fig. 10, we found interesting findings that could not be obtained by conventional methods. That means that the practical upper design value of hold volume of the target ship type is about 625,000 m3. As shown in Fig. 11, when trying to obtain the hold volume at 625,000 m3 or more, DHP becomes unacceptably large. Comparing to conventional and manual design approach, the present method has the advantage that many studies enables designer to obtain new findings or knowledge.
4 Concluding Remarks
In this paper, a hull form design system which can optimize both propulsion performance and cargo capacity has been developed. The system utilizes high fidelity CFD and 3D CAD model, considering cargo hold and main engine placement. In hull shape optimization aimed at EEDI, it is important to increase the cargo capacity (deadweight). For bulk carriers and tankers, the shape of the main machine room, especially the length in the longitudinal direction, has a particularly strong influence on the load capacity. Therefore, in the optimization of the local shape of the stern shape, the multi-objective optimization of the propulsive performance and the cargo capacity to the change of the shape of the main machine room are important.
Demonstration of this design system has been carried out in this paper. The target ship is a 62,000-deadweight class bulk carrier called NMRI-N-BC. Multi-objective optimization of propulsion performance and load capacity has been performed by deforming hull forms based on rear frame lines and sectional area curve. The present system can provide a Pareto solution, maximizing propulsion performance and cargo capacity. Compared to conventional manual case study, the proposed system can present dozens of optimized design results in a wide range like the optimum design surface. In addition, this new design knowledge can be obtained from the results, that is the upper limit value of the cargo capacity of the target class ship. From these discussions, the effectiveness of the proposed multi-objective ship design system has been confirmed.
References
Campana, E., Peri, D., Tahara, Y., Stern, F.: Shape optimization in ship hydrodynamics using computational fluid dynamics. Comput. Methods Appl. Mech. Eng. 196, 634–651 (2006)
Tahara, Y., Peri, D., Campana, E.F., Stern, F.: Single- and multi-objective design optimization of a fast multihull ship: numerical and experimental results. J. Mar. Sci. Technol. 16(4), 412–433 (2011)
Nowacki, H., Brusis, F., Swift, P.M.: Tanker preliminary design—an optimization problem with constraints. Trans. SNAME, 78 (1970)
Holtrop, J., Mennen, G.G.J.: An approximate power prediction method. International Shipbuilding Progress (1982)
Ichinose, Y., Kume, K.: A Program named “HOPE Light” for optimizing hull-form dimensions. Papers of National Maritime Research Institute, vol. 15, no. 4, pp. 407–419 (2015). https://www.nmri.go.jp/en/_src/26755/PNM23150403-00.pdf. Accessed 6 Mar 2019
Tahara, Y., Ichinose, Y., Takami, T., Kaneko, A.: Simulation based global concept and local geometry optimization for ship design considering propulsive performance in actual seas and fatigue damage evaluation by using global oceanographic model and onboard monitored data. In: 32nd Symposium on Naval Hydrodynamics (2018)
EU HOISHIP Project. http://www.holiship.eu. Accessed 6 Mar 2019
Papanikolaou, A.: Holistic ship design optimisation. In: Papanikolaou, A. (ed.) A Holistic Approach to Ship Design, pp. 9–42. Springer, Cham (2019)
Marzi, J., Papanikolaou, A., Brunswig, J., Corrignan, P., Lecointre, L., Aubert, A., Zaraphonitis, G., Harries, S.: HOLISTIC ship design optimization. In: Kujala, P., Lu, L. (eds.) IMDC 2018, Marine Design XIII. Taylor and Francis group, Routledge (2018)
De Jongh, M., Olsen, K.E., Berg, B., Jansen, J.E., Torben, S., Abt, C., Dimopoulos, G., Zymaris, A., Hassani, V.: High-level demonstration of holistic design and optimization process of offshore support vessel. In: Kujala, P., Lu, L. (eds.) IMDC 2018,Marine Design XIII. Taylor and Francis group, Routledge (2018)
NAPA. https://www.napa.fi. Accessed 6 Mar 2019
Hirata, N., Hino, T.: An efficient algorithm for simulating free-surface turbulent flows around an advancing ship. J. Soc. Naval Architect. Japan 185, 1–8 (2000)
Hirata, N., Hino, T.: Numerical computations of ship flows in full-scale. In: Computational Methods in marine Engineering, Barcelona, Spain (2007)
Hirata, N., Hino, T.: A comparative study of zero- and one-equation turbulence models for ship flows. J. Kansai Soc. Naval Architects 234, 17–24 (2000)
Ohashi, K., Hirata, N., Hino, T.: A comparative study of body force models representing effects of contrarotating propellers. Trans. West-Japan Soc. Naval Archit. 105, 55–64 (2003)
Acknowledgments
This work was partially supported by JSPS KAKENHI Grant Number 17K06975. The authors would like to express their appreciation to those who concern for the support and encouragement.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Ichinose, Y., Tahara, Y., Takami, T., Kaneko, A., Masui, T., Arai, D. (2021). A Study of Multi-Objective Optimization for Propulsion Performance and Cargo Capacity. In: Okada, T., Suzuki, K., Kawamura, Y. (eds) Practical Design of Ships and Other Floating Structures. PRADS 2019. Lecture Notes in Civil Engineering, vol 65. Springer, Singapore. https://doi.org/10.1007/978-981-15-4680-8_15
Download citation
DOI: https://doi.org/10.1007/978-981-15-4680-8_15
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-4679-2
Online ISBN: 978-981-15-4680-8
eBook Packages: EngineeringEngineering (R0)