
Abstract
This chapter highlights the communication and network technologies that contribute to UAV disaster management systems, surveys the latest development of UAV-assisted disaster management applications, including early warning system, search and rescue, data gathering, emergency communication, and logistics, and presents our preliminary work to demonstrate the benefits and challenges of UAV systems for emergency communication. Finally, we discuss the characteristics and design challenges of UAV disaster management systems.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
Large-scale natural disasters test the most fundamental human instinct of survival by inflicting massive and often unpredictable loss of life and property. Different types of natural disasters, such as climatological (extreme temperature, drought, and wildfire), meteorological (tropical storm, hurricane, sandstorm, and heavy rain-fall), hydrological (flash-floods, debris flow, and floods), and geophysical (earthquake, tsunami, volcano, landslide, and avalanche) have resulted many deaths and huge economic damage [1]. According to a report published by Münchener Rückversicherungs-Gesellschaft (Munich R. n.d.) in 2017, the tsunami which struck in 2004 was the deadliest natural disaster occurring worldwide in the last four decades. The disaster claimed almost 222,000 lives. Similarly, the earthquake that affected Haiti in January 2010, was the second deadliest disaster that cost approximately 159,000 lives. Also, according to another survey conducted by the United States Geological Survey (USGS), nearly 316,000 people died, 30 million were injured, and 1.3 million were displaced [2]. In addition to the fatalities mentioned earlier, billions of U.S. dollars were invested in the rehabilitation process resulting in huge economic damage. According to another statistic, the earthquake and tsunami in Japan in 2011 caused an economic damage of almost 210 billion U.S. dollars [3]. To predict and identify the incidences of natural disasters in order to respond on a timely manner and to reduce the number of fatalities and economic damage, there is therefore a need for an enhanced and efficient network-assisted disaster management system [4].
Unmanned Aerial Vehicles (UAV) have shown their power to tackle some of the most challenging tasks to human beings, such as natural disasters. To develop and deploy UAV-based solutions has attracted great interest from both academia and industry worldwide. Although natural disasters cannot be avoided, their effects could be significantly mitigated through a comprehensive, and highly efficient disaster management system. Time is the most essential factor for the success of disaster management. How to quickly assess the degree of the disaster effects, and design reasonable disaster response to address urgent and most severe scenarios is a challenging issue.
Traditional disaster management systems that rely only on ground emergency responses suffer from the issues of low efficiency in information gathering and disaster assessment, slow identification of victims, and limited communication services including large latency and low bandwidth satellite communication. Further challenging issues that disaster rescuers face are logistics. Following a severe disaster event, streets and roads of the affected area could be blocked by debris or destructed, how to quickly access the disaster area and victims becomes the most critical factor for a successful disaster management. One typical disaster is, for instance, the 7.8 magnitude earthquake in Nepal, which claimed the lives of 9000 and injured 23,000 people [5].
Significant research efforts have been dedicated to reduce the adverse effects of natural disasters towards the human society and environment. UAVs have been introduced to disaster management to enhance the capability of disaster responses, deal with the extreme environmental conditions and conduct timely rescue work [6]. During a disaster event, UAVs could bring rescuers the bird’s-eye view of the disaster environment, which is very important for a comprehensive disaster management system that involves data collection, victim localization and rescue optimization.
UAVs can be embedded into the entire life-cycle of disaster management. Police departments, fire brigades, and disaster response departments will have access to medium and small UAVs and will be able to integrate UAVs into their rescue work. At the pre-disaster stage, UAVs can be used together with the existing early warning systems to accurately predict the outbreak time and scope, and reduce the cost of economy and materials that disaster may cause through disaster prevention plan. During the disaster, UAVs can provide high-resolution real-time images of even the inaccessible locations, which can then be used to quickly produce accurate hazard maps to guide the rescuer to assess the situation, make relief plans and conduct rescue. And after disaster, UAVs can be used to map the affected areas in high resolution within a short time, which, in turn, can aid swift and efficient response.
2 UAV Networking Technologies
Networking technologies are essential to the success of UAV deployment in practical environments. In this section, we focus on the networking technologies of UAV systems for disaster management and response. First, we introduce a universal network architecture that integrates 802.11 Wi-Fi network, 2G/3G/4G cellular network, UAV ad hoc network and satellite network [7]. Key networking components will be discussed and analysed in detail with an emphasis on determining whether the existing technologies could meet the performance of UAV disaster management.
2.1 Network Architecture
A universal network architecture for UAV-based disaster management is illustrated in Fig. 1, which consists of Wi-Fi network, 2G/3G/4G cellular network, UAV ad hoc network and GPS assisted satellite network.

A universal network architecture for UAV-based disaster management
At the top layer, UAVs connect to the GPS satellite network by equipping a GPS receiver on-board, which periodically provides the geolocation and time information. The information is critically important for UAVs to accurately and safely accomplish the disaster response tasks. Examples include the Google Loon project: balloons deployed by Google at the high altitude around 18 km above the ground, proving cellular and internet services for remote and rural areas [8]. For UAV-based disaster management, the high-altitude balloons provide effective means to establish communication among the UAVs, and between the UAVs and ground stations in a large-scale geographic area. Another example is the EU ABSOLUTE project, which creates a hybrid kite-balloon, named Helikite, to rapidly deploy 4G communications for emergencies [9]. Two types of network connectivity exist in the envisioned network architecture, named infrastructure-based connectivity and ad hoc network connectivity.
Infrastructure-based connectivity
For infrastructure-based network connectivity, each ground node, e.g. LTE eNode base station or WI-FI access point, can easily communicate with aerial UAVs, and thus establish a star topology network structure where the UAV is at the center of the star. Under this topology, the ground station can indirectly communicate with others over the UAV. Infrastructure-based network connectivity has the benefits of easy deployment, configuration, and reliable channel conditions, while it suffers from limited coverage and bandwidth limitation when high-definition videos are required to transmit in the large area for disaster analysis and recovery. One solution to this issue is to deploy a sophisticated UAV at high-altitude, covering a large area, collecting valuable data, storing it on-board and discharge it later to the ground station when UAVs return back, or exchanging information with the ground eNode stations in real time.
Ad hoc-based network connectivity
Multiple low-cost mini UAVs form an aerial ad hoc network, as shown in Fig. 1. For disaster management, mini UAVs could fly at lower altitudes and accomplish tasks in a distributed manner. They do not require specific launching device, and can take-off and land at various types of terrains, making them very suitable for disaster environment. In addition, during a strong disaster event, a team with mini-UAVs are capable to satisfy on-demand service request at fine-grain level. However, a lot of challenging issues exist when multiple UAVs are practically deployed in disaster events. For instance, mini-UAVs have restricted capabilities such as power, sensing, communication, and computation. They cannot fly for a long time in the air and are hard to maintain stable and reliable communication links. Therefore, more research efforts are needed to achieve reliable and high-performance ad hoc-based UAV network connectivity.
It is worth mentioning that a UAV disaster management system should adaptively choose the most suitable type of connectivity, depending on the disaster scenarios and the network infrastructure available in the affected area. If the 2G/3G/4G cellular networks are working normally, then UAVs can be connected to the base stations. Otherwise, ad hoc connectivity may be formed to transmit the information captured by UAVs to ground control stations in a multi-hop way. In the next section, we will introduce the system components and performance requirements of different UAV applications.
2.2 System Components
The holistic system architecture of UAV networks (shown in Fig. 1) is composed of three main components: a ground control centre or operator, ground and aerial communication networks, and UAV devices.
-
The ground control centre is responsible for the overall control of the whole UAV system, flight task design, data storage and analysis as well as decision making in case of emergency. It provides the interface for human users to interact with the UAVs in the air.
-
Communication networks provide reliable and high-performance communication for a UAV system to transmit and receive the information to/from the ground control centre. As shown in Fig. 1, various wireless communication approaches have been exploited to provide ubiquitous communication access for disaster management. Their characteristics and performance are summarized in Table 1.
Table 1 Characteristics of wireless communication technologies in disaster management -
UAV devices provide the essential platform for sensing and communication, e.g. data gathering, processing, and transmission. In addition, it may also run various algorithms to maintain safety and tackle emergencies such as battery exhaustion and signal loss.
UAVs play a key role in the universal network architecture. Therefore, the capacity, performance, and operation theatre of the UAV system directly relate to its abilities, such as endurance, range, altitude, and payload [10, 11]. To use UAVs in different applications, an emerging requirement of decreasing the personnel needs and increasing the autonomy of UAVs, by which they can fly freely in the sky and carry out the mission without any centralized controller from the ground station, is becoming more and more clear. UAVs used in disaster management should be pilotless aircrafts that do not require direct human intervention for flying and operating. They should navigate autonomously according to the pre-programmed software and can be controlled remotely.
3 UAV for Emergency Communication
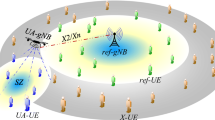
Cooperative wireless networks composed of small unmanned aerial vehicles (UAVs) are easy and fast to deploy, flexible, and inexpensive and can provide on-the-fly communication facilities through self-managed ad hoc Wi-Fi networks to coordinate the rescue teams in case of disastrous events and to help the survivors in a timely manner [12]. Figure 2 shows a complete architecture of a UAV-based cooperative wireless network deployed over a large geographical area in order to provide on-the-fly communication facilities in a disaster affected area. In such situations, UAVs are used as communication relays to bridge communication in those areas where part of the communication infrastructure is destroyed due to natural disasters such as earthquakes, flood or man-made disasters such as bomb-blast, military attacks etc.

UAV-based cooperative wireless network for disaster management
3.1 UAV as a Communication Relay
UAVs as communication relays have got much attention in recent years and a lot of work have been done in this area. In [13], we proposed an optimal UAV deployment algorithm (OUDA) in order to quickly deploy the UAV to an optimal position to bridge communication between nodes on the ground and to provide the best communication facilities to the participating ground stations. The algorithms work in a way that the UAV will start flying toward the disaster area and will begin sending beacon messages at regular intervals. Once the participating nodes get the beacon message, in response the nodes send their ID along with the GPS position back to the UAV. The UAV will also obtain the received signal strength (RSS), and distance between the UAV and participating nodes on the ground. A mathematical model was also developed for our proposed approach and based on that mathematical model the optimal position of the UAV was calculated with respect to transmitted signal and distance between UAV and nodes. An extensive simulation was carried out to verify the applicability of the proposed algorithm for real-time applications in the context of disaster management.
Similarly, in [14], the authors analyzed the deployment of a UAV as a flying base station. They used the idea to provide on-the-fly wireless communication facilities to a specific geographical area for a determined device-to-device communication network. The authors explained their problem considering two different scenarios with a static UAV and a mobile UAV. The authors continue to say that the overall communication rate and coverage could be improved significantly if the UAV is precisely moved over the specified area [14].
Moreover, Jagun and Hales in [15] presented a dynamic positioning algorithm in order to bridge communication between participating nodes using a UAV as a relay. The authors claim that this approach could be used in real-life situations such as an earthquake and collecting data from distributed sensor nodes. The approach works in a way that a direct link can be established between nodes that are in the range of the UAV. The authors also proposed a scheduling framework where they prioritised different nodes based on the frequency of visit and communication range in order to cover the entire set of distributed nodes [15].
Furthermore, in [16], the authors explored a communication system with some ground based terminals along with a network base station with a view to bridging communication between them using a UAV as a relay. The authors developed an algorithm for performance optimisation of the link between ground base terminals and relay. They also investigated the deployment of new UAV relays to the existing network in the situation when the current UAV relay does not meet the minimum link requirements [16]. Moreover Morgenthaler et al. [17] developed UAVNet, a flying wireless mesh network based on unmanned aerial vehicles (UAVs) connected with each other through IEEE 802.11s. The proposed system connects two end systems to communicate with each other through a single or multiple UAVs. The authors explained their work with different scenarios using two different positioning modes. Scenario one was carried out with a single UAV connecting to end systems located on the ground. The UAV starts flying towards the first end system and begins to transmit ping messages on a regular basis. Once the first end system received the message, it sends back its GPS position to the UAV. Based on either manual searching mode, where the first end system will tell the UAV the direction of the second end system, or based on the autonomous searching mode, where the UAV will calculate series of waypoints on a spiral track and will follow this route until it receives the GPS location message from the second end system. Once the UAV obtains a GPS position message from the second end system, the UAV controller will calculates the central position of the two end systems based on the submitted GPS positions or signal strength and will deploy the UAV at that particular position [17].
3.2 Bridging Communication Through Multiple UAVs
Complex situations occur when a single UAV is unable to cover a disaster area in a specific mission. Multiple UAVs are used in such cases in order to cover a set of nodes in a bounded region. A cooperative distributed planning algorithm termed as the consensus based bundle algorithm (CBBA) was proposed in [18] in order to ensure network connectivity with limited communication facilities for a group of heterogeneous agents operating in a dynamic environment. The algorithm with UAV as relays improves the mission performance and range of the team without any constraint on the active agents. CBBA used those agents which are free as relays for network connectivity to the base station during task execution. A set of assignments of agent-task pairs is created from the pool of initial tasks so that the process of bidding can be carried out on each task. During this bidding process some of the tasks may not be assigned and that may result in network disconnection. The unassigned tasks that are disconnected from the base are introduced as new relay tasks, and based on their assignments they will create a connected network. The authors validated the algorithm based on simulation results and through indoor and outdoor experimental field tests, and concluded that CBBA is well suited for real time applications [18]. Similarly, swarms of UAVs as communication relays for range and reliability improvement of ground based ad hoc networks were studied in [19]. The authors envisaged the application of distributed multiple-input-multiple-output (MIMO) schemes on multiple UAVs in a cluster, and also noticed the performance of distributed transmit beamforming and distributed orthogonal space-time block codes (OSTBC) techniques for different UAV flights under ideal and non-ideal conditions. Different simulation parameters were used to verify the performance of both the aforementioned techniques. The BER performance along with different Rice K-factors effects for both schemes were examined. The authors concluded that in case of lower carrier frequencies, better performance with distributed beamforming can be achieved. The authors also showed that multi-hop relaying based on a swarm of UAVs could improve the performance of ad hoc networks with respect to range and reliability and could be more useful in tactical scenarios [19].
Complexity increases when a swarm of UAVs are deployed to provide coverage to a group of nodes that are moving in a constrained area. A non-cooperative game technique where each UAV independently decides its future location without the cooperation of any central planning agent was proposed in [20]. The proposed approach used the UAV as a player and the mobile nodes as their payoffs. The UAVs have enough data in order to estimate the locations of other mobile nodes and UAVs and to independently execute their decisions. This kind of approach is more advantageous in the optimization process in a sense that the UAVs have full freedom to come-up with the same solution without the involvement of any central decision-making agent, and also allow the UAVs to complete the mission with full autonomy due to the onboard decision making about the next waypoint. The proposed algorithm also termed as a game comprises of three main elements i.e. set of players, set of strategies for each player, and set of payoffs with respect to selected strategies by each player. In such a game, each player tries to maximize their share of the available resources in order to compete with the co-players. Each player selects different actions from his available set of action also called the strategy, and based on these strategies each player will try to maximize his payoffs. The players need to be restricted to their own strategies because a deviation from the selected strategy will results a reduction in the player’s payoff. The set of strategies where the players cannot deviate from his selected strategy is known as Nash Equilibrium (NE). The author highlighted two states of the NE, one is called the Pure Strategy Nash Equilibrium (PSNE), where a single action is taken against each strategy and against each action the best responses from all players are coincided, while the second one is called the Mixed Strategy Nash Equilibrium (MSNE), where the probability distribution law is followed for the range of strategies. The author devised a method for solving n-player games using the concept of MSNE. Based on the simulation results the author concluded that non-cooperative game techniques are more useful for coordinating the movement of communication of UAVs over the area coverage missions [20].
Furthermore, a heuristic algorithm for dynamically placing UAVs as relay nodes for providing communication facilities to disconnected groups of MANET ground nodes was proposed by Chandrashekar et al. [21]. The authors also addressed the issue of mobility for ground nodes and also to update the location of UAVs with respect to the movement of nodes. The algorithm takes the node connectivity matrix generated from distance and terrain constraints, and current location as an input variable in order to deploy the UAV. Clusters of nodes are also detected using the same connectivity matrix and based on this particular information the number of UAVs along with their optimal position for each time frame are calculated. The authors also evaluated a communication framework for facilitating communication between ground nodes and UAVs using the existing MANET protocols. The proposed algorithm was verified based on simulation results and comparative analysis with an exhaustive search algorithm [21].
3.3 Bridging Communication to Connect Disjoint Group of Segments
Heimfarth and Araujo in [22] addressed the issue of connecting disjoint group of wireless sensor networks using a UAV. The UAV works as a data mule that moves across the network to collect data from different disjoint segments. Each segment has their own cluster head that is responsible for any type of communication with UAV. The authors perceived very little packet loss for reasonable traffic along with substantial latency because of the limited speed of the UAV making the system ideal for delay tolerant applications [22]. Similarly, Zhu et al. [23] investigated the problem of deploying a new UAV to an existing UAV deployed network in order to maintain the connectivity of ground mobile ad hoc networks (MANETs). The authors assumed a scenario where the current UAVs were unable to maintain the connectivity of MANETs due to the movement of ground nodes and restricted communication range. The idea of the Minimum Steiner Tree problem with existing mobile Steiner points under edge length bound constraints was used to articulate the problem. The authors used three existing UAV aware approximate algorithms i.e. Deploy-Before-Movement (DBM), Move-Before-Deployment (MBD), and Deploy-Across-Movement (DAM). The authors concluded that DAM algorithm is much better than the other two algorithms in terms of performance for all scenarios and can reduce the deployment of the number of new UAVs up-to 70% [23].
Furthermore Heimfarth and Araujo extended their previous work by prioritizing and visiting those disjoint segments having more incoming/outgoing traffic compared to other segments with low communication traffic [24]. The authors also addressed the issue of UAV movement which was the main contribution of their current article. Two different operating modes with respect to a UAV were studied i.e. search mode and traffic relay mode. In search mode, the UAV just scans the entire network and stores the position of the cluster head for each new disconnected segment, while in packet relay mode, the UAV visits all the cluster heads sequentially in order to get the statistics of communication traffic for each segment. From the simulation results the authors concluded that by prioritizing the segments, having more communication traffic could increase the packet delivery rate up to 70% and could decrease the average latency from 600 s to 240 s. The authors also assert that without prioritizing the highly demanded segments could lead to the mismanagement of resources and should only be used in the case of evenly distributed traffic [24].
Moreover, a cooperative multiple input multiple output (MIMO) technique was used to extend the lifetime of a sensor network and to support communication among the static sensors in a sparse network using a UAV as a relay in order to keep the WSN connected [25]. Two main concepts were combined to sort out the problem of disconnections in the case of scattered WSN: the first one was the use of UAV as a relay to bridge isolated sensor nodes, and secondly the use of MIMO techniques to prolong the communication range of these static sensor nodes. To keep the connectivity alive, the base station periodically sends beacon messages to its neighbour UAVs. Upon receipt, the UAVs forwards the same beacon message to their neighbour UAVs having the identification information of the sender UAV along with its distance from the base station in terms of hops. An algorithm was proposed based on RSSI to stop the UAV movement in a situation when the UAV is on the edge of the communication range. The algorithm identifies that if a UAV has only one neighbour and the RSSI received from the last neighbour indicates that the communication link is near to break-point, the algorithm forces the UAV to move back to its previous position in order to keep the connection alive. Similarly, instead of conventional MIMO arrangement, the authors used the concept of MISO (multiple input single output) where a cluster of nodes sends data to the UAV. In the case of MISO, the transmitting sensors first share the information with each other and then forward it to the receiver at the same time. The authors concluded that introducing MIMO based communication could considerably extend their group range and could ease the UAVs movement constraints [25].
3.4 Real-Time UAV-Assisted Disaster Management
In this section, we will highlight some of the work that is carried out in real-time environments to check the applicability and applications of the UAV-based wireless networks for disaster management. Guillen-Perez et al. in [26] proposed a UAV-based aerial wireless network in order to extend the coverage of wireless systems. The experiments were carried out by using the IEEE 802.11 standard versions such as a/b/g/n/ac. Five dBi omnidirectional antennas were used to extend the coverage. The performance of a Galileo board used as an intermediate node was investigated in both indoor (controlled lab) and outdoor environment. A maximum throughput of 10.5 and 11 Mbps with a packet-size of 512 and 1024 bytes respectively was claimed at infrastructure mode, while a throughput of 4.5 and 7.5 Mbps with the same 512 and 1024 bytes was claimed at ad hoc mode using the IEEE 802.11n at both 2.4 and 5 GHz band. Similarly, the radio coverage for both downlink and uplink frequencies at 2.4 and 5 GHz band using the 802.11a/b/g/n/ac was also calculated in the presence of both Friis and Winner D1 propagation models. The authors pointed that the radio-coverage attained during the real experiments is quite different from the one observed during the theoretical study. The authors concluded that the systems perform better in terms of coverage, throughput, and energy efficiency in infrastructure mode, while in terms of current consumption, the system performs better in ad hoc operational mode [26]. Similarly, in [27] the authors investigated the challenges of wireless communication between UAVs in search and rescue missions where the UAVs equipped with cameras need to deliver high resolution images to rescuers through high speed communication. Real-time testbed experiments were conducted based on IEEE 802.11n protocol to check the quality of UAV-to-UAV links under varying context parameters. The experiments were conducted in an outdoor environment to investigate the effects of distance, speed, and rate adaptation over link quality and network performance. The authors concluded that the throughput achieved during the experiments using the IEEE 802.11n is not only far from the maximum throughput observed during the theoretical setup, but also varies drastically even in the case of constant distance between UAVs [27].
Furthermore, Yanmaz et al. [28] proposed a high-level architecture for the design of a collaborative aerial system consisting of quadcopters in order to demonstrate its potentials in disaster assistance, search and rescue operations, and aerial monitoring. In addition to the UAV platform, the authors also identified some other main building blocks such as sensing, coordination, and communication modules of a multi-UAV system. The main purpose of this research was to provide support to firefighters during disaster, to extend the coverage capabilities with no mission time constraints, and real-time video support for search and rescue operations. The application areas mentioned earlier were explored with respect to different coordination, sensing, and communication constraints such as: for time-critical missions (search and rescue operations) with varying objectives, the authors proposed that distributed coordination, reliable sensing and networking capabilities are required. Real-world tests and experiments were performed to observe the applicability of the proposed multi-UAV systems for dynamic applications [28].
3.5 Results and Discussion from Real-time Testbed Experiments
In this section, we will discuss some of the results based on the experiments performed in an outdoor environment through a communication link facilitated by an Access Point (AP) mounted on a UAV between the two participating ground stations and a UAV. The results presented in Fig. 3 are based on the work carried out in [29], while the results presented in Fig. 4 are based on the experiments carried out in [30]. In [29], we proposed a UAV-based wireless network to bridge communication between two ground stations and a UAV having an access point mounted on it using IEEE 802.11n. We investigated the performance of 802.11n at both 2.4 and 5 GHz band in terms of data rate, link quality, received signal strength (RSS), and signal-to-noise ratio (SNR) in order to check the applicability of the proposed network for rescue operations and disaster management scenarios. Figure 3 shows the link quality and signal to noise ratio of 802.11n at 2.4 and 5 GHz band for both the client and server machines. As evident from Fig. 3a, b the link quality is quite good for both client and server machines during the experiment (above 70%); it is worth noting that 802.11n at 2.4 GHz has better link quality as compared to 802.11n at 5 GHz. Similarly, Fig. 3c, d shows the SNR of 802.11n at both 2.4 and 5 GHz for both client and server machines respectively. Again, the SNR is lower in the case of 802.11n at 2.4 GHz, while higher in the case of 802.11n at 5 GHz. Low SNR values represent better signal quality, while high SNR values represent poor signal quality. Interference because of wind in an outdoor environment was basically the reason behind such a high SNR.

Link quality and signal-to-noise ratio of IEEE 802.11n at 2.4 & 5 GHz band

Data rate of IEEE 802.11 a/b/g/n-2.4 GHz/n-5 GHz band
Similarly, in [30], we extended the work of [29] and performed some outdoor experiments in order to check the performance of IEEE 802.11a/b/g/n. We analysed the performance of 802.11a/b/g at 2.4 GHz and 802.11n at both 2.4 and 5 GHz band in terms of data rate, signal-to-noise ratio, and received signal strength. Three different scenarios were envisioned in terms of UAV altitude in order to check the applicability of the proposed systems in disaster management situations. In scenario 1, we calculated the data rate, signal strength, and signal to noise ratio of between UAV and ground stations at 10-meter height, while in scenario 2, and 3, we repeated the same experiments for the same metrics at a height of 15-meter and 20-meter respectively. The ground stations were used as a client and server, where the client send a data of 10 MB to the server through a communication link facilitated by 802.11 protocol stack. Figure 4 shows the data rate of IEEE 802.11a/b/g/n at 2.4 GHz and 802.11n at 5 GHz band using a 20 MHz channel at 10 m (Fig. 4a), 15 m (Fig. 4b), and 20 m (Fig. 4c) respectively. As evident from the figure, the data rate captured by using 802.11a/b/g at 2.4 GHz is very low in all three cases and is not practicable in real-time disaster management events. Instead, the data rate captured by using 802.11n at both 2.4 and 5 GHz band is quite impressive and can be practiced in real-time catastrophic events.
3.6 Summary
Starting with the calamities that hit different parts of the world in the last two decades resulting in millions of fatalities and economic damage in terms of billions of dollars, we highlighted some key areas that could provide help in different catastrophic events and could facilitate timely rescue services to reduce the casualties and economic damage. UAVs as communication relays can provide on-the-fly communication facilities in situations where part of the communication infrastructure is destroyed and there is a need for help on emergency basis to coordinate the rescue teams and help the survivors in a timely manner. Similarly, we investigated some of the key algorithms developed for bridging communication through multiple UAVs in order to extend the coverage area and connect disjoint group of segments. Moreover, we also covered real-time UAV deployment scenarios that could help by providing communication facilities in disaster management situations. Finally, we discussed some of the experimental results from our own work in terms of bridging communication between ground stations and UAV in the context of rescue operations and disastrous events.
4 UAV Based Disaster Management
The capabilities of UAVs offer to revolutionize the efficiency and accuracy of disaster management. This section discusses several applications assisted by UAV systems and demonstrates the potentials of UAVs to in the prediction, management and recovery of disaster events, including early warning system, emergency communication, search and rescue, information gathering and logistics.
4.1 Early Warning Systems
With the development of the sensor and telecommunications, early warning systems appear as a promising solution for disaster management to prevent the loss of life and reduce the economic impacts of disaster event. Early warning systems are usually composed by a series of sensors to detect the changes of environment monitored and a chain of information communication systems to transmit the data to decision-makers. An effective early warning system supports the functions of monitoring, dissemination, risk analysis and corresponding responses.
Currently, most of the early warning systems are deployed based on the wireless sensor network technology, which distributes sensors to a wide monitoring geographic area and interconnects them through wireless links. These sensors are used to monitor physical metrics, such as temperature, moisture, vibration, pressure and so on. Although a huge amount of research work has been dedicated to the performance of sensor-based early warning system, some practical challenges make these early warning systems unsuitable for extreme environment. For instance, the sensor nodes are connected through multiple wireless communication links and the monitoring data need to be sent to sink node through multiple intermediate nodes. In this case, any node failure or broken link would degrade the data delivery. A simple example is that sensor nodes for water monitoring may be washed away in a flood event, compromising the whole warning system. Although, 3G/LTE/LTE-A cellular networks become popular in sensor-based early warning systems to enable data communication, they are not supported by all sensors due to high power consumption.
UAVs are exploited in early warning systems coupled with WSN to provide a comprehensive and high-efficient warning for disaster prediction. There are several ways that UAVs could be used to work together with WSNs in disaster warning.
-
1.
UAVs can be regarded as mobile base stations or data mules in the sky to provide the communication between WSN nodes and decision-making centre. In this case, the data could be uploaded to the aerial UAVs and downloaded by decision-making centre, avoiding the transmission of multiple intermediate nodes, greatly enhancing the reliability and stability of data transmission [31].
-
2.
The second scenario that UAV can be integrated to WSN-based early warning systems is when a certain node or part of network architecture is failing. UAVs could be deployed as relay nodes in the network to deliver data among remote WSN nodes, which is very important for building delay-tolerant networks.
-
3.
The node of WSN network is driven by battery, which makes the energy as a critical important issue in the design, deploy and management of early warning system. Once the power is run out, the node will stop working. In this case, UAV could be exploited as an aerial charger to fly to the exhausted node to refill the battery. There are research publications [32] to investigate the transmitting the power and data simultaneously by exploiting the mobility of UAVs in disaster management. Therefore, UAV have become an important part for designing, deploying and managing early warning system.
4.2 Emergency Communication
Emergency communication is an important part of disaster response and recovery. The aim of emergency communication is to provide the communication for the disaster rescuers, affected people, and plan makers. Reliable and easy access communication system is the key to the success of disaster management work, such as information gathering, search and rescue and disaster assessment. As shown in Sect. 3, various communication and information technologies have been exploited in disaster management. The interoperability of the existing wireless communication technologies, such as WiFi, cellular, ad hoc networks as well as aerial base station should be enhanced to improve the capability of wireless communication. Although traditional telecommunication infrastructure could provide high-speed internet and wireless cellular service, they may be disrupted by large-scale nature disasters, for instance the damage to the cable and base station tower due to earthquake, or the shutdown of power supply in a flood event. As a result, the usual mode of communication like mobile devices might not work or might be lost in the calamity.
To address the urgent need of infrastructure independent communication, UAV based solutions have been proposed. The team in [33] designed a UAV-based WiFi system, which largely extends the working distance of the traditional signal from 100 m to 25 km through deploying WiFi module in UAV devices. In addition, directional antenna is used in this system to focus the transmission energy in a certain angle. This work is conducted based on a single UAV device. Multiple UAVs become popular to form an ad hoc network to provide the wireless signal to a wide area. The authors in [34] proposed a multi-UAV enabled wireless communication system, where each UAV carries an aerial base station and provides wireless communication to ground users. To achieve the fairness among the ground users, a maximization-minimization problem is formed by taking UAV’s trajectory and power consumption into account and solved by successive convex optimization techniques. To demonstrate the effectiveness of UAVs for post disaster communication, authors of [35] proposed a UAV based emergency communication system, being deployable in large-scale disaster events.
4.3 Search and Rescue
Disaster response is always a race against time, to identify and approach the disaster victims as fast as possible. The primary goal is to save lives. UAVs could assist disaster responders to achieve this goal through quickly scanning large disaster area in the sky and identify potential victims with the help of on-board cameras and navigation sensors. Some interesting research results have been reported in literature. To design an efficient UAV-based search and rescue system, several fundamental factors need to be taken into account, including the energy constricts of UAV systems, quality of the data collected, various hazards of the environment UAV is operating, as well as the QoS of data transmission among UAVs.
The authors in [36] analysed the effects of these factors on the performance of UAV-based search and rescue systems, and studied the optimisation criterions of different search algorithms. Mario et al. [37] proposed a multipurpose UAV for mountain rescue operations. Different environment requirements for mountain search and rescue have been considered in the design of this multipurpose UAV, for instance, the low temperature, high altitude, various payloads and weather conditions. The proposed UAV is equipped with high-performance camera to provide the visual and thermal information. The UAV could be deployed in various search and rescue missions such as identifying victims in heavy snow and woods during night or day. In addition, this multipurpose UAV is designed to be able to carry up to 5 kg payload on-board. Emergency kits or life-support device could be dropped to the victim. The researchers in [38] investigated the effectiveness of UAVs in the search and rescue mission of a hurricane disaster. An emergency response simulation was built to conduct UAV-based search mission in a hypothetical country affected by a hurricane with subsequent flooding and landslides. The test demonstrated that a UAV could only provide limited support for search and rescue, and the authors also pointed out that UAVs have the potential to become part of the emergency response toolkit for very specific tasks. Zheng et al. proposed an integrated search and rescue system by combining aerial and ground unmanned robots [39]. The ground vehicles are responsible for delivering aerial devices in the disaster area and serving as the launching platform for UAVs. Once the UAVs take off from the ground vehicle, they will quickly scan the disaster area and acquire global visual information, which will be used by the ground vehicle to find the optimal path. Therefore, ground and aerial vehicles work cooperatively to accomplish the search and rescue work.
4.4 Information Gathering
Disaster damage assessment becomes essential for rapid relief actions. For decision making, various information is collected and transmitted; therefore, information gathering, or fusion is important for disaster management. For instance, satellite imagery has the advantages to offer visual data of a large-scale geographic disaster area, but these images are usually taken from the space in a vertical perspective, with limited spatial resolution. On the other hand, UAV devices could be deployed to observe the disaster areas in detail, but with limited coverage. Therefore, how to combine the images or video obtained from different platforms and form a unified model of the disaster scenario is a critical and challenging issue for disaster responses.
To address this issue, a novel framework was proposed in literature [40]. Image processing techniques were exploited to combine the advantages of different aerial platforms. The small scale images obtained from UAV devices are used to detect a facade by integrating the geometrical transformation and environment information. Then the large-scale vertical information such as roof and facade features obtained by satellites is used to assess the disaster range. Finally, the overall damage is estimated by information fusion. The authors claimed that their approach could enhance the accuracy of damage estimation in comparison with the roof-only damage estimation approaches. Corrado et al. in [41] investigated how to enhance the performance of an existing UAV device for disasters assessments. The information of radiation detection, camera vision, as well as GPS information is jointly considered. The authors pointed out that the primary challenges for information gathering for low-cost commercial UAVs in disaster assessment is dynamicity of the operation environment, including data transmission range, endurance, payload, and control range. To achieve the integration of multi-sensor data, data fusion models and methods should be developed for a single UAV platform and multiple UAVs [42, 43].
4.5 Logistics
As discussed in the first part of this chapter, one of the most challenging issues in disaster management is logistics. The streets and roads may be blocked or damaged during or after a severe disaster, and it is difficult for the rescue personnel to approach the victims and provide necessary treatments. UAV could be used to drop emergency supplies to victims of disaster areas, such as telecommunication devices, food, and medicine. Current civilian UAVs could only carry up to several kilograms of payload and may not be efficient solutions in logistics for frequent request of emergency drops.
Significant progresses have been achieved to maximize the capability of UAVs in logistics, for instance, fix-wing UAVs are used to transport medicines into remote or inaccessible regions [44]. Compared with the traditional helicopter approaches, UAV-based logistics significantly reduce the cost of delivery and could be affordable for poverty communities. Similar efforts were made by DHL and Amazon to deliver a small quantity of medicine to remote areas. In addition, Google revealed that they also tested UAVs for logistics in the Google X program. John et al. in [45] proposed a coordinated logistics consisted of a truck and a fleet of UAVs. The truck carries the parcels and is automatically operated. The UAVs are launched from the truck with a parcel. Once it is delivered successfully, the UAV will come back to the truck to pick up another one, until all parcels have been delivered. This work investigated how the coordinated system enhances the quality of service for logistics.
5 Design Challenges and Consideration
This section discusses the design challenges and consideration of UAV based ad hoc network for disaster management. Comparing with existing ad hoc based networks, e.g. vehicular ad hoc network (VANET) and mobile ad hoc network (MANET), UAV ad hoc network exhibits different characteristics. The unique features of transmission come from the very specific mission requirements of various aerial applications, e.g. fine-grained oil-pipe or avalanche patrols or flooding disaster response. The specific requirements of the aerial applications pose new challenges for system design, network performance requirement, and communication optimization, considering the factors of delay tolerance, transmission range, topology changes, mobility issue, performance scalability, energy constraints as well as heterogeneous devices.
For example, tight timing synchronization must be met among multiple UAVs when they cooperatively work on the disaster rescue, while large communication delay could be tolerated in the applications such as disaster area scanning. High data rate is expected for sending visual data to identify trapped people, while other applications such as air quality monitoring of the disaster area require low transmission rate. Therefore, different applications have different requirements on the design of the aerial network.
In this section, we first analyse the characteristics of UAV networks in the following three aspects: bandwidth consumption, transmission latency and disruption prone networks. We then discuss the design consideration and challenges with the aim to obtain a complete understanding of UAV system design.
5.1 Characteristics of UAV Networks
Bandwidth consumption
For visual data related UAV applications, e.g. search and rescue, videos are captured by on-board cameras and required to be transmitted to the ground control centre timely. They have strict bandwidth requirements, especially for online applications such as real-time monitoring. In addition, the quality of the video captured largely determines the amount of the information that could be used in decision making, therefore, 4K and even 8K videos become increasingly popular in aerial monitoring applications, and push the bandwidth consumption much higher. On the other hand, there are many constraints on the available bandwidth, such as, capacity of the communication channel, speed of UAVs, error-prone structure of the wireless links, lack of security with broadcast communication. The protocols and algorithms designed for the UAV system must satisfy the bandwidth requirement for transmitting high resolution real-time image or video under these constraints.
Transmission latency
For UAV systems, transmission latency is of importance in the design of system components and network protocols. Different aerial applications have different requirements of transmission latency. 3GPP began to specify the latency requirements for aerial applications. For sensed traffic that requires real-time visual or audio data transfer (e.g. research and rescue), the delay should be no more than 50–100 ms. For surveillance, such as border or highway surveillance, the delay can be up to 3 s. Low latency is defined to achieve the online perspective of the aerial commissions, and more important to ensure safe flight, e.g. collision avoidance. The work in [33] investigated the behaviour of packet delay of UAV networks, and concluded that UAV networks exhibit different behaviours than MANETs, and require new aerial transmission protocols and algorithms.
Disruption prone networks
UAV networks are prone to link disruption. The protocols and algorithms should be designed with precautions of dealing with link failure in short or long periods. The disruption level of a link depends on a few factors, including the mobility of UAVs, the distances among them as well as the communication environments such as interference and noise. For the applications that UAVs are hovering over the air, the probability of link disruption will be low. While if the UAVs are operated in high mobility, there exists a high probability of link disruption. Another factor that may impact the quality of the transmission link is the failure of UAV devices. Due to malfunctions or cyber attacks, a UAV may not function properly and fail to communicate with other UAVs. New designs should take disruption into consideration, particularly upper level routing algorithms.
5.2 Design Considerations and Challenges
Channel Modelling:
The 3D nature of a UAV network demands the support of various types of channels. The links in an aerial network can be either air-to-air (A2A), air-to-ground (A2G) or ground-to-air (G2A). These links have been analysed against each other as well as against ground-ground (G2G) links [46, 47]. They should be modelled differently according to their distinctive channel characteristics, which affect the supportable network related QoS, and hence the sustainable traffic.
Antenna Structure Design:
Antenna structure design in UAV networks should be considered specifically, because link quality fluctuates with antenna orientation. How to efficiently design the structure of UAV antennas to support reliable communication between UAVs and the infrastructure is a timely challenge, with few efforts being demonstrated [48].
UAV Cooperation:
Mini-UAVs are small in size and can only carry limited payloads. Facing the rich options such as radars, infrared cameras, thermal cameras, and image sensors, they need to work cooperatively among the team, and with the ground network such as a cloud to effectively complete the tasks in disaster management [49].
Advanced data analytics:
One of the advantages of solution-focused algorithms is the ability to apply them across industries, e.g. emergency response, agriculture, energy, even identifying toxic waster in the air in real-time. Advanced algorithms such deep neural networks may provide the much needed functions.
Path Planning:
Cooperation and coordination among UAVs are crucial to increase efficiency. In the operation theatre, there can be some dynamic changes like joining/removal of UAVs, physical static obstacles, dynamic threats, etc. In these cases, each UAV has to change its previous path, and new ones should be re-calculated dynamically. High performance algorithms/methods in dynamic path planning are required [50].
Energy efficiency:
As UAVs are usually limited by energy, protocols should take special attention on energy efficiency and aim to greener designs. Energy could become a vital factor in disaster management, for example, good design could enable UAVs reach further areas and stay longer for disaster response.
Regulations:
While UAVs are gaining their share of the country’s national airspace, their deployment has to be regulated in order to maximise the benefits and minimise the potential harms. Regulation may be the biggest barrier for deployment of UAVs in some civilian applications. Properly designed rules and regulations are of practical importance.
References
Ruckversicherungs-Gesellschaft M (2015) Loss events worldwide 1980–2014. Geo Risks Research, NatCatSERVICE
nd MR (2018) The 10 most significant natural disasters worldwide by death toll from 1980 to 2016. Statista. Available at https://www.statista.com/statistics/268029/natural-disasters-by-death-toll-since-1980/. Accessed 5 Feb 2018
nd MR (2018) The 10 biggest natural disasters worldwide by economic damage from 1980 to 2016 (in billion U.S. dollars). Statista. Available at https://www.statista.com/statistics/268126/biggest-natural-disasters-by-economic-damage-since-1980/. Accessed 5 Feb 2018
Erdelj M, Natalizio E, Chowdhury KR, Akyildiz IF (2017) Help from the sky: leveraging uavs for disaster management. IEEE Pervasive Comput 16(1):24–32
Government of Nepal Ministry of Home Affairs (2015) Nepal disaster report
Hein D et al (2017) An integrated rapid mapping systems for disaster management. Int Arch Photogram Remote Sens Spatial Inf Sci vol XLII-1/W1
Gupta L et al (2016) Survey of important issues in UAV communication networks. IEEE Commun Surv Tutorials 18(2)
Rakesh MT (2016) Study on Google‘s loon project. Int J Adv Res Comput Eng Technol (IJARCET) 5(5)
Sathyanarayanan Chandrasekharan et al (2016) Designing and implementing future aerial communication networks. IEEE Commun Mag 54(5)
Wang Y et al (2014) Three-dimensional wireless sensor networks: geo-metric approaches for topology and routing design. In: The art of wireless sensor networks, signals and communication technology. Springer, Berlin, p 367–409
Luo C, Parr G, McClean SI, Peoples C, Wang X (2015) Hybrid demodulate-forward relay protocol for two-way relay channels. IEEE Trans Wireless Commun 14(8):4328–4341
Rosati S, Krużelecki K, Heitz G, Floreano D, Rimoldi B (2016) Dynamic routing for flying ad hoc networks. IEEE Trans Veh Technol 65(3):1690–1700
Ullah H, McClean S, Nixon P, Parr G, Luo C (2017) An optimal UAV deployment algorithm for bridging communication. In: 15th international conference on ITS telecommunications (ITST), pp 1–7
Mozaffari M, Saad W, Bennis M, Debbah M (2016) Unmanned aerial vehicle with underlaid device-to-device communications: performance and tradeoffs. IEEE Trans Wireless Commun 15(6):3949–3963
Jagun K, Hailes S (2014) Scheduling UAVs to bridge communications in delay-tolerant networks using real-time scheduling analysis techniques. In: System integration (SII), 2014 IEEE/SICE international symposium on 2014, pp 363–369
Luo C, McClean SI, Parr G, Wang Q, Wang X, Grecos C (2014) A communication model to decouple the path planning and connectivity optimization and support cooperative sensing. IEEE Trans Veh Technol 63(8):3985–3997
Morgenthaler S, Braun T, Zhongliang Z, Staub T, Anwander M (2012) UAVNet: A mobile wireless mesh network using unmanned aerial vehicles. In: Globecom Workshops (GC Wkshps), 2012 IEEE, pp 1603–1608
Ponda SS, Johnson LB, Kopeikin AN, Han-Lim C, How JP (2012) Distributed planning strategies to ensure network connectivity for dynamic heterogeneous teams. IEEE J Sel Areas Commun 30(5):861–869
Palat RC, Annamalau A, Reed JR (2005) Cooperative relaying for ad hoc ground networks using swarm UAVs. IEEE Military communications conference (MILCOM), pp 1588–1594, 17–20 Oct 2005
Charlesworth PB (2014) Using non-cooperative games to coordinate communications UAVs. In: Globecom Workshops (GC Wkshps), pp 1463–1468
Chandrashekar K, Dekhordi MR, Baras JS (2004) Providing full connectivity in large ad hoc networks by dynamic placement of aerial platforms. IEEE Military communications conference (MILCOM), pp 1429–1436, 31 Oct–3 Nov 2004
Heimfarth T, de Araujo JP (2014) Using unmanned aerial vehicle to connect disjoint segments of wireless sensor network. In: IEEE 28th international conference on advanced information networking and applications, pp 907–914
Zhu M, Liu F, Cai Z, Xu M (2015) Maintaining connectivity of MANETs through multiple unmanned aerial vehicles. Mathematical Problems in Engineering, vol 2015, p 14
Heimfarth T, de Araujo JP, Giacomin JC (2014) Unmanned aerial vehicle as data mule for connecting disjoint segments of wireless sensor network with unbalanced traffic. In: IEEE 17th international symposium on object/component/service-oriented real-time distributed computing, pp 246–252
Marinho MAM, de Freitas EP, de Costa JPCL, de Almeida ALF, de Sousa RT (2013) Using cooperative MIMO techniques and UAV relay networks to support connectivity in sparse wireless sensor networks. In: International conference on computing, management and telecommunications (ComManTel), pp 49–54, 21–24 Jan 2013
Guillen-Perez A, Sanchez-Iborra R, Cano MD, Sanchez-Aarnoutse JC, Garcia-Haro J (2016) WiFi networks on drones. In: 2016 ITU kaleidoscope: ICTs for a sustainable world (ITU WT), pp 1–8
Asadpour M, Giustiniano D, Hummel KA, Heimlicher S (2013) Characterizing 802.11n aerial communication. Presented at the proceedings of the second ACM MobiHoc workshop on airborne networks and communications, Bangalore, India
Yanmaz E, Yahyanejad S, Rinner B, Hellwagner H, Bettstetter C (2018) Drone networks: communications, coordination, and sensing. Ad Hoc Netw vol 68, pp 1–15
Ullah H, Abu-Tair M, McClean S, Nixon P, Parr G, Luo C (2017) An unmanned aerial vehicle based wireless network for bridging communication. In: The 14th international symposium on pervasive systems, algorithms and networks, pp 179–184
Ullah H, Abu-Tair M, McClean S, Nixon P, Parr G, Luo C (2018) UAV-based wireless network for bridging communication using IEEE 802.11 protocols. Submitted to IEEE journal on selected areas in communications (JSAC), Special issue on airborne communication networks
Andre T et al (2015) Application-driven design of aerial communication networks. IEEE Commun Mag 52(5):129–137
George SM et al (2010) DistressNet: a wireless ad hoc and sensor network architecture for situation management in disaster response. IEEE Commun Mag 48(3):128–136
Shengli Fu et al (2015) Spotlight: UAVs for disaster area communication. HDIAC Spotlight
Wu Q et al (2018) Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Trans Wireless Commun 17(3):2109–2121
Gurkan Tuna et al (2012) Design strategies of unmanned aerial vehicle-aided communication for disaster recovery. In: 9th IEEE international conference on high capacity optical networks and enabling technologies (HONET)
Sonia Waharte et al (2010) Supporting search and rescue operations with UAVs. In: 2010 international conference on emerging security technologies (EST)
Silvagni Mario et al (2016) Multipurpose UAV for search and rescue operations in mountain avalanche events. Geomatics Nat Hazards Risk 8(1):18–33
Swiss foundation for mine action (2016) Simulation—drones for search and rescue in emergency response simulation
Zhang J et al (2016) Flooding disaster oriented USV & UAV system development & demonstration. In: IEEE-Oceans
Kakooei M et al (2017) Fusion of satellite, aircraft, and UAV data for automatic disaster damage assessment. J Remote Sens 38(8)
Corrado C et al (2017) Data fusion and unmanned aerial vehicles (UAVs) for first responders. In: 2017 IEEE international symposium on technologies for homeland security (HST)
Jiang X, Ren P, Luo C (2016) A sensor self-aware distributed consensus filter for simultaneous localization and tracking. Cognitive Comput 8(5):828–838
Gong Y, Luo C, Chen Z (2012) Two-path succussive relaying with hybrid demodulate and forward. IEEE Trans Veh Technol 61(5):2044–2053
Raptopoulos A (2013) No Roads? There is a Drone for That. TED Conference
Carlsson JG et al (2017) Coordinated logistics with a truck and a drone, Inform
Luo C, Casaseca-de-la-Higuera P, McClean S, Parr G, Ren P (2018) Characterisation of received signal strength perturbations using allan variance. IEEE Trans Aerosp Electron Syst 54(2):873–889
Morgenthaler S, Braun T, Zhao Z, Staub T, Anwander M (2012) UAVNet: A mobile wireless mesh network using unmanned aerial vehicles. In: Proc IEEE GLOBECOM Workshop-WiUAV, pp 1603–1608
Luo C, Wang Q, Wang X, Grecos C, Yang R, Ren P (2013) Exploiting selection diversity and recovering spectrum loss in wireless sensor networks with directional antennas. Globecom, 2013 IEEE, Atlanta, Georgia, 9–13 Dec 2013
Luo C, Nightingale J, Asemota E, Grecos C (2015) A UAV-cloud system for disaster sensing applications. In: IEEE 81st vehicular technology conference (VTC Spring), Glasgow, 11–14 May 2015
Luo C, McClean SI, Parr G, Teacy L, De Nardi R (2013) UAV position estimation and collision avoidance using the extended kalman filter. IEEE Trans Veh Technol 62(6):2749–2762
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this chapter

Cite this chapter
Luo, C., Miao, W., Ullah, H., McClean, S., Parr, G., Min, G. (2019). Unmanned Aerial Vehicles for Disaster Management. In: Durrani, T., Wang, W., Forbes, S. (eds) Geological Disaster Monitoring Based on Sensor Networks. Springer Natural Hazards. Springer, Singapore. https://doi.org/10.1007/978-981-13-0992-2_7
Download citation
DOI: https://doi.org/10.1007/978-981-13-0992-2_7
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-0991-5
Online ISBN: 978-981-13-0992-2
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)