
Abstract
Micro-satellite ad hoc network has attracted a lot of interest from both the academia and industry, due to its better performance of earth coverage, data access delay and so on. MAC protocol design is one of the key and important problems in the micro-satellite ad hoc network. In this paper, we propose the Multi-Detection based CSMA protocol for the micro-satellite ad hoc network named as MD-CSMA, in which each satellite senses the channel by multiple detections. Compared with the traditional CSMA, the MD-CSMA protocol provides better performance of channel utilization ratio and guarantees the space mission with high-level priority. First, the related works about MAC protocols and micro-satellite ad hoc network are reviewed, and we show that the CSMA protocol better suits the micro-satellite ad hoc network than the TDMA protocol. Then, we propose the MD-CSMA protocol and its analysis. Finally, we construct various simulations to verify that the MD-CSMA protocol has better performance in terms of channel utilization ratio, mission satisfied ratio, and average latency of data access than the CSMA/CA protocol and the TDMA protocol.
This work is supported by the National Natural Science Foundation of China, under Grants 61401278, and CAS Innovation Fund, under Grants CXJJ-15S086.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Compared with one single big satellite, the micro-satellite ad hoc network can not only implement the full function of the single big satellite, but also provide higher efficiency gain by promoting adaptability, scalability, reconfigurability, and affordability [1]. Therefore, micro-satellite network has become an efficient and economical approach to resolve many new space missions, such as navigation, communications, remote sensing, and scientific research [2]. The MAC protocol is an important and key role in the micro-satellite network. In this paper, we design a multi-detection based CSMA protocol, named MD-CSMA, to improve the performance of channel utilization, mission satisfied ratio, and data access latency.
In order to make the best use of micro-satellite ad hoc network and complete various kinds of space missions. The Medium Access Control (MAC) protocol should be designed by considering the network and mission features, such as network topology, micro-satellite number, mission priority [3], and so on.
There has been many MAC protocols proposed for satellite network [4,5,6,7]. In [7], the authors proposed the Time Division Multiple Address (TDMA) protocol for a cluster of micro-satellite, in which time is divided into time slots and each micro-satellite is allowed to transmit or receive in one time slot. The Frequency Division Multiple Access (FDMA) protocol for micro-satellite network is analyzed in [8], in which multiple satellites can communicate at the same time by using different frequencies. However, when the number of micro-satellites is huge, TDMA will cost a high data access delay, and FDMA will waste channel resources. The Carrier Sense Multiple Access with Collision Avoidance (CSMA/CA) protocol is proposed in [9, 10], in which transmitting node detects the channel state by using Request-to-Send (RTS) and Clear-to-Send (CTS) signals. With the increase of the micro-satellite number, the performance of CSMA/CA will deteriorate caused by too many collisions. In this paper, we propose a multi-detection based CSMA protocol to improve the performance of channel utilization ratio and mission satisfied ratio by multiple collision detections.
In MD-CSMA protocol, we divide a time slot into multiple mini-time slots, containing multiple mini-time slots for contention (denoted as contention mini-time slot) and one mini-time slot for data transmission (denoted as data mini-time slot). The length of contention mini-time slot is much shorter than the length of data mini-time slot. In the contention mini-time slot, transmitting micro-satellites contend for the data mini-time slot. If there is a collision happened in this contention mini-time slot, each micro-satellite will stop contending with a retreat probability in order to avoid contention. The retreat probability relates to the mission priority. The MD-CSMA protocol can increase the channel utilization by multiple contentions, and guarantee the high-level priority mission by retreat probability.
The main contributions of the paper are as follows.
-
We are the first to propose the MD-CSMA protocol for micro-satellite network. In this protocol, the micro-satellite contends channel in the multiple contention mini-time slots when it has transmission mission, which increases the channel utilization ratio by multiple detections.
-
We propose the retreat probability, which guarantees the high-level priority mission. The retreat probability relates to the mission priority, i.e., the lower-level space mission owns the higher retreat probability. Therefore, the higher-level space missions are satisfied with higher probability.
-
We construct various simulations to evaluate the efficiency of the MD-CSMA protocol. Evaluation results show the proposed MD-CSMA protocol outperforms the traditional CSMA protocol and the TDMA protocol in terms of channel utilization ratio, mission satisfied ratio, and data access latency.
The remainder of our paper is organized as follows. In Sect. 2, we briefly review the related work. Then we propose the MD-CSMA protocol in Sect. 3. In Sect. 4, we propose the theoretical analysis about the MD-CSMA protocol. We present the evaluation results in Sect. 5. Section 6 concludes our work and propose our future work.
2 Related Work
With the development of Chinese economy and the advancement of One Belt And One Road policy, the number of space missions experiences a huge explosion. Because of the adaptability, reconfigurability, and affordability, the micro-satellite ad hoc network has become a promising and economical approach to resolve the explosion space mission. In [11], the authors reviewed the Project “F6” of Defense Advanced Research Project Agency (DARPA), which propose the Distributed Satellite System (DSS).
The MAC protocol plays an important role in the inter-satellite communication [4]. There has been lots of research on the MAC protocol design for micro-satellite ad hoc network, which can be generally divided into two categories: conflict-free protocols and contention based protocols. Some basic protocols of the conflict-free protocols are TDMA (Time Division Multiple Access), FDMA (Frequency Division Multiple Access), and CDMA (Code Division Multiple Access). Their common idea is that each satellite use different time slot, or frequency, or code to transmit, which ensures that collision of data transmission never occurs. In [6], the authors analyzed multiple contention based protocols, such as ALOHA, CSMA, BTMA (Busy Tone Multiple Access), ISMA (Idle Signal Multiple Access), and so on. Their common idea is that satellites contend for the channel. Due to the scalability of network and the difficulty of synchronization, the conflict-free protocol might not be the best option for inter-satellite ad hoc network. Therefore, we propose a contention based protocol, which adapts the changes in the network size and network topology.
3 The MD-CSMA Protocol
In this paper, G is used to denote the micro-satellite network. We take micro-satellite i as an example to illustrate the MD-CSMA protocol. We assume that micro-satellite i has N neighboring micro-satellites. And some of the micro-satellite i’s neighboring micro-satellites request to communicate with the micro-satellite i, denoted as the requesting micro-satellites.
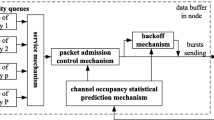
In the MD-CSMA protocol, a time slot is divided into multiple mini-time slots, containing multiple contention mini-time slots and one data mini-time slot, as shown in Fig. 1. The requesting micro-satellites contend in the contention mini-time slots, and complete the communication mission in the data mini-time slot. Figure 2 illustrates the framework of the contention mini-time slot. The contention mini-time slot contains two sub-mini-time slots. In the first sub-mini-time slot, the transmitting micro-satellites transmit the Request To Send (RTS) to the micro-satellite i. In the second sub-mini-time slot, micro-satellite i feedbacks the Clear To Send (CTS) if it receive a RTS successfully.

A motivation example for movement.

The framework of contention mini-time slot.
Figure 3 illustrates the successful reservation and collision. Figure 3(a) illustrates the successful reservation between micro-satellite i and one of its neighboring micro-satellites. More specially, there is only one micro-satellite transmitting RTS to micro-satellite i. Once micro-satellite i receives the RTS, it will feedback the CTS to the transmitting micro-satellite. If the transmitting micro-satellite receives the CTS, they reserve the data transmission successfully and the other micro-satellite i’s neighboring micro-satellites know this reservation by receiving this CTS (since this CTS contains the id of micro-satellite i and the id of the transmitting micro-satellite.). Figure 3(b) illustrates the collision, in which there are more than one micro-satellite i’s neighboring micro-satellites transmitting RTS to micro-satellite i. That causes a collision in micro-satellite i, and none of these neighboring micro-satellites can reserve data transmission.

The illustration of contention.
If a requesting micro-satellite wins in the contention mini-time slot, it will transmit data to micro-satellite i in the data mini-time slot. If there is a collision, in the next contention mini-time slot some transmitting micro-satellites will stop contending with a retreat probability in order to decrease the probability of collision.
Generally, there are many kinds of space missions with different priority in the micro-satellite ad hoc network. In order to satisfy the high-level-priority mission, the high-level priority mission has a lower retreat probability. In our paper, we assume that there are M levels. The lower-level space mission owns the higher retreat probability. We define the retreat probability of the m-th level space mission as
The length of the contention mini-time slot is much shorter than the length of data mini-time slot, which increase the channel utilization ratio.
4 Analysis of the Protocol
In this section, we propose the theoretical analysis of the MD-CSMA protocol. To clarify the presentation, we list the notations used in the analysis here.
-
i: the micro-satellite i,
-
N: the number of micro-satellite i’s neighbors,
-
\(N_0\): the number of micro-satellite i’s neighbors requesting to communicate with micro-satellite i at \(t_0\)-th time slot,
-
M: the number of mission kinds,
-
m: the level of mission priority, \(m=1,2,\ldots ,M\),
-
\(p_m\): the retreat probability of the m-th mission,
-
K: the number of contention mini-time slots.
There are \(N_0\) micro-satellites requesting to communicate with micro-satellite i at \(t_0\)-th time slot, and these \(N_0\) will transmit RTS at the first contention mini-time slot of the \(t_0\)-th time slot. If there are more than one micro-satellites transmitting RTS to micro-satellite i, there is a collision in micro-satellite i. We define \((1-P_1)\) as this probability. In order to avoid the collision, these \(N_0\) micro-satellites will stop contending in the second contention mini-time slot with the corresponding retreat probabilities.
The retreat probability relates to the level of mission priority. Generally, the mission with higher priority has lower retreat probability (as shown in Eq. 1), which satisfies that the higher-level mission can win in the contention mini-time slots with higher probability.
We define \(P_2\) as the probability of successful conservation at the second mini-time slot, as shown in Eq. 2.
\((1-P_1)\) is the probability that these \(N_0>1\) requesting microsatellites lost in the first contention mini-time slot. \((1-p_n)\cdot \prod _{n_{0}\ne n}p_{n_0}\) is the probability that the micro-satellite n wins in the second contention mini-time slot, where \((1-p_n)\) is the probability that micro-satellite n transmitting RTS at the second contention mini-time slot, \((1-p_n)\) is the probability that the other micro-satellites stop transmitting RTS at the second contention mini-time slot. Therefore, there is one micro-satellite winning in the second contention mini-time slot is \(P_2\). Similarly, we define \(P_k\) as the probability that there is a micro-satellite winning at the k-th contention mini-time slot, as shown in Eq. 3.
\(\prod _{1,\cdots ,k-1}(1-P_{k-1})\) is the probability that there is no micro-satellite winning before the k-th contention mini-time slot. \(N_{k-1}\) is the number of micro-satellites transmitting RTS at the \((k-1)\)-th contention mini-time slot, and the micro-satellite n is one of these \(N_{k-1}\) micro-satellites. \(((1-p_n)\cdot \prod _{n_{0}\ne n}p_{n_0})\) is the probability that the micro-satellite n wins at the k-th contention mini-time slot.
We define P as the probability that there is a micro-satellite winning in K contention mini-time slots, as shown in Eq. 4.
\(P_1\) is the probability that there is a micro-satellite winning in the first contention mini-time slot. \(P_k\) is the probability that there is a micro-satellite winning at the k-th contention mini-time slot.
The number of contention mini-time slots has an influence on the performance of the MD-CSMA protocol. On one hand, too many contention mini-time slots will cause waste. On the other hand, if there is not enough contention mini-time slots, there may be no micro-satellite winning in the K contention mini-time slots. In Eq. 5, we analyze how to get the minimum number of contention mini-time slots that guarantees \(P>P_0\) (\(P_0\) is a given probability.).
In Eq. 5, P is an increasing function of K. Therefore, we can easily get the result of Eq. 5.
5 Experimental Evaluation
In this section, we construct various simulations to evaluate our proposed MAC protocol. In order to illustrate the outperformance of the MD-CSMA protocol, we compare our proposed MAC protocol with the TDMA protocol and the CSMA/CA protocol. In the TDMA protocol, a time slot is divided into N mini-time slots for the N neighboring nodes. In the CSMA/CA protocol, each satellite contend at a random time slot. When there is a collision, they stop contending for a random period.
The following three metrics are used for evaluating our proposed protocol.
-
Channel utilization ratio: the ratio of channel reserved successfully. It refers to the effective bandwidth utilization
-
Mission satisfied ratio: the ratio of space missions being satisfied. It refers to the efficiency of the MD-CSMA protocol.
-
Average latency of data access: the average delay over all the generated queries, where data access delay is defined as the time elapsed between generation of query and the reservation.
We construct various simulations in two different scenarios. In the first simulation scenario, the number of micro-satellites varies from 48 to 288. There are 12 Low Earth Orbits (LEO), each containing 4 / 5 / / 24 micro-satellites. Micro-satellite uses directional antenna, and its beam width is \(5^o\). The number of each micro-satellite’s neighboring micro-satellites varies from 2 to 10. Due to the mobility of micro-satellites, each micro-satellite cannot meet all of its neighboring nodes at the same time. In the traditional TDMA, we divide a time slot into 10 mini-time slots. There are 10 levels of mission priority. And the distribution of mission priority obeys to the Zipf-distribution, i.e., \(p_m^{mission}=\frac{1}{m^s}/(\sum _{m=1}^{M}\frac{1}{m^s})\), where m is the mission priority level, M is the number of mission priority levels, \(s=1\). Each micro-satellite transmits RTS with probability \(P_m\).

Channel utilization.
Figure 4 shows the performance comparison of channel utilization. With the increase of micro-satellite number, each micro-satellite has more neighboring micro-satellites. The X-axle denotes the number of neighboring nodes. The Y-axle denotes the channel utilization ratio. Figure 4 shows that the proposed MD-CSMA protocol outperforms the CSMA/CA protocol in terms of channel utilization ratio. When \(P_m\) is large, the MD-CSMA protocol outperforms the TDMA protocol. The reason is as follows. The MD-CSMA protocol provides a better channel utilization ratio than the CSMA/CA protocol by using multiple contention. Since the time slot structure of the TDMA protocol is fixed, the MD-CSMA protocol can provide a better performance of channel utilization ratio.

Mission satisfied ratio.
Figure 5 shows the performance comparison of mission satisfied ratio. Generally, the MD-CSMA protocol outperforms the CSMA/CA protocol in term of mission satisfied ratio by multiple contentions. When \(P_m=0.8\), the MD-CSMA protocol outperforms the TDMA protocol in terms of mission satisfied ratio. The reason is as follows. The MD-CSMA protocol provides a better mission satisfied ratio than the CSMA/CA protocol by using multiple contention mini-time slots. Since the time slot structure of the TDMA protocol is fixed, when \(P_m\) is large, the MD-CSMA protocol can provide a better performance of mission satisfied ratio.

Average latency of data access.
Figure 6 shows the performance comparison of data access delay. Generally, the MD-CSMA protocol outperforms the CSMA/CA protocol in term of data access delay by using multiple contention mini-time slots. When \(P_m=0.2\), the MD-CSMA protocol outperforms the TDMA protocol in terms of data access delay. The reason is as follows. The time slot structure of the TDMA protocol is fixed, when \(P_m\) is small the MD-CSMA protocol can satisfied the space mission with less delay than the TDMA protocol.
In the second simulation scenario, there are 12 Low Earth Orbits (LEO), each containing 24 micro-satellites. And each micro-satellite has 10 neighboring micro-satellites. \(P_m\) \((m=1,2,\ldots , 288)\) is the probability that the micro-satellite m is a requesting micro-satellite. We various \(P_m\) from 0.2 to 0.8.

Channel Utilization ratio comparison.
Figure 7 shows the performance comparison of channel utilization ratio. The MD-CSMA protocol outperforms the CSMA/CA protocol and the TDMA protocol in term of channel utilization. And the performance improvement is more significant with a larger requesting probability. The reason is as follows. The time slot structure of the TDMA protocol is fixed, the requesting micro-satellite cannot use the time slot of the other micro-satellites (even these micro-satellites are not requesting micro-satellites). The MD-CSMA protocol makes the best use of the channel resource by using the multiple contention mini-time slots. Therefore, the MD-CSMA protocol achieves a better performance of mission satisfied ratio. We have got the similar comparison results in terms of mission satisfied ratio and average data access latency.
6 Conclusion and Future Work
In this paper, we propose a new MAC protocol for the micro-satellite ad hoc network, named Multi-Detection Carrier Sense Multiple Access (MD-CSMA), where the micro-satellites reserve the mission mini-time slot by multiple contention. When there is a collision, the transmitting micro-satellite stop contending by a retreat probability. The retreat probability relates to the mission priority, which guarantees the space mission of high-level priority. Compared with the TDMA protocol and the CSMA/CA protocol, our proposed MD-CSMA protocol provides better performance in terms of channel utilization ratio, mission satisfied ratio, and data access delay.
In the future, we will research how to set the retreat probability by considering the game theory, in order to improve the efficiency of contention mini-time slot.
References
Zhan, Y., Ma, Z., Cao, Z.: Technology of modern micro satellite and its development direction. Chin. J. Electron. 7, 102–106 (2000)
Dai, Y., Seng, Y.: Development and Inspiration of Space Technology, vol. 3, pp. 7–14 (2014)
Wertz, J.R., Larson, W.J.: Space Mission Analysis and Design. Space Technology Library, New York (2008)
Radhakrishnan, R.R., Edmonson, W.W., Afghah, F., Rodriguez-Osorio, R.M., Pinto Jr., F., Burleigh, S.C.: Survey of inter-satellite communication for small satellite systems: physical layer to network layer view. IEEE Commun. Surv. Tutor., 1 (2016)
Tang, Z.: Research on MAC Protocols of Self-Organizing Networks in Small Satellite Constellation. A thesis of Master from National University of Defense Technology
Goldsmith, A.: Wireless Communications. Cambridge University Press, New York (2005)
Kang, H., Jiang, X., Xiong, W.: STDMA for inter-satellite communication in low earth orbit. In: Liang, Q., Mu, J., Wang, W., Zhang, B. (eds.) Proceedings of the 2015 International Conference on Communications, Signal Processing, and Systems. LNEE, vol. 386, pp. 391–398. Springer, Heidelberg (2016). https://doi.org/10.1007/978-3-662-49831-6_39
Heidari, G., Truong, H.: Efficient, flexible, scalable inter-satellite networking. In: IEEE Wireless for Space and Extreme Environments (WiSEE) 11, pp. 1–6 (2013)
Sidibeh, K., Vladimirova, T.: Communication in LEO satellite formations, adaptive hardware and systems. In: NASA/ESA Conference (2008)
Radhakishnan, R., Zeng, Q.A., Edmonson, W.W.: Inter-satellite communications for small satellite systems. Int. J. Interdiscip. Telecommun. Netw. 5, 11–24 (2013)
Liu, H., Liang, W.: Development of DARPAs F6 program. Chin. J. Spacecr. Eng. 2, 92–98 (2013)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Tian, F., Gui, L., Jiang, X., Sun, S., Liang, G., Cao, Y. (2018). Multi-detection Based CSMA Protocol for Micro-satellite Ad Hoc Network. In: Yu, Q. (eds) Space Information Networks. SINC 2017. Communications in Computer and Information Science, vol 803. Springer, Singapore. https://doi.org/10.1007/978-981-10-7877-4_10
Download citation
DOI: https://doi.org/10.1007/978-981-10-7877-4_10
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-7876-7
Online ISBN: 978-981-10-7877-4
eBook Packages: Computer ScienceComputer Science (R0)