
Abstract
The purpose of this research is to control the particles motion by the ultrasonic standing wave in air. In this research, simulation have been compared with experiment for the confirmation of validity and examined the possibility for control of particles motion by ultrasonic standing wave. As the result, simulation corresponded with experiments qualitatively. Also, maximum sound pressure can be increased by converging the acoustic wave with a reflector. Then slow speed particles are more easily affected by acoustic radiation force. But, the motion control of small particle was difficult because acoustic radiation force acting on particle was weak. Additionally, motion of small particle is susceptible to acoustic streaming. Therefore influence of acoustic streaming must be taken into consideration when we want to control the motion of small particle.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
If control of particle behaviour with ultrasound becomes possible, agglutination and collection are capable without scratching the particle structure due to non-contact operation. Kozuka [1] has proved that it is possible to control the micro sized particles with ultrasonic. Authors [2] also have been researching experimentally and calculatedly while particle density, diameter, wind speed, sound pressure, vibration frequency are changed. Then we have concluded particle behaviour in the ultrasonic standing wave field can be controlled and the optimum condition regarding particle properties has been indicated. But it is not sufficient because the number of condition is few in order to conclude the optimum condition.
Then, the purpose of this study is that particle motion is analysed experimentally and calculatedly while the maximum sound pressure, shape of reflection plate and particle diameter are changed. Then calculation is compared with experiment to investigate the validity of calculation result, and the optimum condition for control of particle motion is tried to propose by checking how the standing wave condition affects on motion.
2 System Modeling and Experimental Apparatus
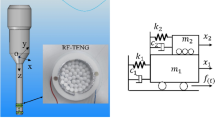
A schematic diagram of calculation and experimental apparatus is shown in Fig. 1. The conditions used in the analysis are shown in Table 1, and the particles properties are shown in Table 2. Vibration and reflection plate in the figure was set to generate a standing wave field as shown in Fig. 1. Flat and cuved plates are used as the reflector. Vibration mode was expressed as following equation.

System modeling and experimental apparatus (units in mm)
where Δy is vibration amplitude, ω is angular velocity, t is time, A m is maximum vibration amplitude of plate, k is the number of vibration wave on the plate and 3 is employed as k. Comsol mutiphysics 5.2a was used in the study.
In this research, flow direction was corresponded with gravity force. Additionally, in this experiment, the particles are dispersed in the air with an aerosol generator and injected between plates with a compressed air. Then particles were shined with PIV laser and this motion was captured with a high speed camera. In this time, air velocity was employed at 0.3 and 0.5 m/s.
3 Results
3.1 Acoustic Pressure Distribution
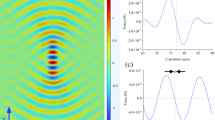
Figure 2 shows the experimental result of the generated sound pressure distribution between plates. In this figure two nodes on acoustic pressure in vertical direction between plates appear. Moreover, the maximum sound pressure at the antinode reaches at 1400 Pa in experiment and calculation, and the shape of the sound pressure distribution is almost the same. Therefore this simulation can catch the acoustic pressure distribution corresponding with experiment.

Acoustic pressure
3.2 Particle Motion
Figures 3 and 4 show particles motion which they pass through a standing wave of sound field. In this experiment, the analysed area for particle motion was divided in flow direction because they could not be captured once with high speed camera. Figure 3 shows the particle motion of polyethylene having a particle size of 500 μm at a flow velocity of 0.5 m/s. As a result, particles move to the node. Their particle density is light and diameter is large. Therefore, they can get large acoustic radiation force and it is easy to move because inertial force is small. On the contrary, in Fig. 4, particle of sodium bicarbonate with a particle size of 80 μm could not have the ultrasonic effect because particles flow straight. This reason is assumed as inertial force and acoustic radiation force. Acoustic radiation force decreases in the case of small sized particle. Additionally it is hard to move the particle which density is heavy because inertial force increases. Also, calcium carbonate with d p = 3 μm is injected into the standing wave field at a velocity of v = 0.3 m/s, and the experimental results and analysis results of the lower part of the field are shown in Fig. 5. As a result of this numerical analysis, the particle behaviour was not affected by the acoustic radiation force and did not move to the node of the standing wave because the particle diameter is small. On the other hand, in the experiment, the particles near the vibration plate tended to move irregularly and did not match the analysis result. Wada et al. [3] said acoustic flow is generated because acoustic pressure reduces in wave transmission direction due to viscosity and inertia of medium. It is thought that the smaller the particle diameter is, the more it is susceptible to the influence of the acoustic flow. Therefore it is easy to move by the flow. Since the influence of flow was not considered in this calculation, particle behaviour like the experimental result could not been observed.

Particle motion (polyethylene, d p = 500 µm, P m = 1810 Pa, v = 0.5 m/s)

Particle motion (sodium bicarbonate, d p = 80 µm, P m = 1810 Pa, v = 0.5 m/s)

Particle motion (Calcium carbonate, d p = 3 µm, P m = 1810 Pa, v = 0.3 m/s)
3.3 Acoustic Streaming
If Rayleigh type acoustic streaming was observed in the ultrasonic standing wave field, and it is presumed that it influences particle behaviour. Therefore, smoke was injected into the standing wave field of Fig. 3, and the acoustic streaming was examined by capturing the flow of smoke with high speed camera and PIV laser. The experimental results when amplitude of antinode A m is 1.47 and 7.61 μm are shown in Fig. 6a, b. We did not consider acoustic streaming in this simulation because it requires the large amount of time. The portion of the orange line on the lower side of Fig. 6a, b is the node of the vibration plate. As shown in Fig. 6a, in the range from the left end to the second node, it can be observed that vortexes are generated above the antinode, and this tendency is similar to the Rayleigh type acoustic flow. It is found that the behaviour of micro-sized particles is easily affected by this acoustic flow. Therefore the difference between simulation and experiment appears in Fig. 5. On the contrary, in the range from the second node to the third node, the smoke vortex does not occur neatly. It is thought that the resonance rod was fixed at the center of the vibration plate and it confuses the flow.

Smoke motion by Experiment (d p = 1 µm, P m = 1310 Pa)
On the other hand, as shown in Fig. 6b, it was observed that smoke does not regularly flow in eddy and flows disorderly. It is thought that the flow velocity is too fast. Acoustic streaming occurs due to viscosity and inertia. If amplitude is large, air was pumped under high velocity and inertia increases. As the Reynolds number increases, the sound flow becomes a turbulent, and it is thought that a conventional vortex does not occur.
It was confirmed that the acoustic flow is easy to influence the behaviour of the micro-sized particles, and it was found that the influence of the acoustic flow must be taken into account for the sake of controlling the micro-sized particles motion.
4 Conclusions
-
1.
Large sized and small density particles are susceptible to the influence of acoustic radiation force, and they are easy to concentrate on nodes.
-
2.
Since the inertial force of large mass particles is large, it is difficult to control behavior.
-
3.
When the particle diameter is small, the influence of the acoustic radiation force is small, and it is difficult to concentrate on the antinode.
-
4.
If the vibration velocity is too fast, the sound flow becomes turbulent and it is difficult to control the small sized particle.
References
Kozuka T, Yasui K, Tsujiuchi T, Towata A, Iida Y (2008) Measurement and calculation of acoustic radiation force acting on a minute object in a standing wave field. J Inst Electron Inf Commun J91-A(12):1156–1160
Liu X, Suzuki H, Kofu K (2015) Control the Particle motion by ultrasonic standing wave. In: Proceedings of the 6th Asian particle technology symposium, PO02–01:272
Wada Y et al (2014) Acoustic streaming in an ultrasonic air pump with three-dimensional finite-difference time-domain analysis and comparison to the measurement. Ultrasonics 54:2119–2125
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Ouchi, K., Kofu, K. (2019). Control of Particle Motion with Ultrasonic Vibration. In: Zhou, Y., Kimura, M., Peng, G., Lucey, A., Huang, L. (eds) Fluid-Structure-Sound Interactions and Control. FSSIC 2017. Lecture Notes in Mechanical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-10-7542-1_47
Download citation
DOI: https://doi.org/10.1007/978-981-10-7542-1_47
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-7541-4
Online ISBN: 978-981-10-7542-1
eBook Packages: EngineeringEngineering (R0)