
Abstract
Ballastless track is wildly employed in high-speed railways as its high stability, low irregularity and low maintain cost. However, uneven settlement at the roadbed will impact the railway’s stability, passenger’s comfort and service life of the track. Amount of models are established to investigate the vibration under uneven settlement and suggest the control standard. However, their simplification about the interaction in settlement zone are unreasonable in some cases. In this research, a vertical vehicle-track coupled model is introduced, in which the vehicle is modeled as multi-rigid body and the track is modeled as multilayer plane beams. The model is validated by track vibration measured in Beijing-Tianjin Intercity Passenger Line. To simulate the vehicle-track interaction under uneven settlement accurately, the settlement is divided into three patterns. In contact pattern, the displacement of track-subgrade interface is assumed to be continuous in settlement zone, while in contact pattern the displacement is assumed to be discontinuous. And in partial contact model, the track-subgrade interface is consider to be partial contact in settlement zone and a proposed trail-iterate algorithm is adopted to correct the contact area and the contact force in each integral step during the calculation. Based on proposed model, the dynamic response in three patterns are introduced. Result shows that the conventional model will obviously overrate the dynamic responses when the settlement is in the scope of partial contact pattern and gapped pattern.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others

Keywords
Introduction
In recent years, high-speed railway has gained rapid development world widely as a fast and energy-saving mass transportation form. In china, the majority of current and planned lines are ballastless track as its high stability, low irregularity and low maintain cost. However, uneven settlement that inevitably occurred in roadbed will arouse drastic vibration and affect the passenger’s comfort, operation safety and service life of the track.
A number of researches has been done to investigate the vibration under uneven settlement and propose reasonable limitations. Generally, the uneven settlement are assumed to be a cosine curve with two specified parameters wavelength L and the amplitude H. And both the wavelength and the amplitude affect the dynamic interaction of vehicle-track system significantly. Song [1, 2] established a vertical vehicle-track model and indicated that the wheel-rail interaction showed more sensitive to settlement with short wavelength while the vehicle acceleration were more affected by settlement with long wavelength. And based on simulation, a limitation schedule of subgrade settlement was suggested. based on nonlinear coupled model, Cai [3, 4] suggested that the ratio of amplitude and wavelength (H/L) limitation is 1‰ in terms of control standards of passenger comfort, wheel-rail interaction and structural stress. For most of established models, subgrade uneven settlement is usually assumed to occur at the top of subgrade and joint with the track structure tightly [5, 6], thus deformation of subgrade will reflect to the track and affect the vehicle-track interaction directly (as show in Fig. 1a). However, the actual interaction mechanisms in settlement zone are complex. Generally, the gravity caused inflection of track structure fills the settlement zone and makes the track and subgrade contact tightly as show in Fig. 1a. But when wavelength of settlement is short and the gravity caused inflection is small as show in Fig. 1b, the contact between track and subgrade may weaken and even come to be void at the interface, which makes the conventional method unavailable.

Two status of track-subgrade interface under the self-graverty
To investigate the dynamic interaction of train-track system under sorts of uneven settlements, a vehicle-track coupled model is built based on vehicle-track coupled dynamic theory. In this model, the gravity of track structure is considered and a trail-iterate algorithm in each time step is developed so that the dynamic response can be calculated accurately considering the track-the subgrade complex contact relation due to the uneven settlement. Details of the model and its application on evaluating vibrations under the uneven settlements will be introduced in this paper.
The Vehicle-Track Coupled Model
Model Introduction
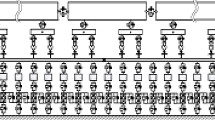
The developed vehicle-track coupled model is modeled according to one of the most common ballastless slab track structure in China, which consisting of rail, CRTS I slab, CA mortar, concrete base and subgrade from top to bottom as show in Fig. 2. The proposed model is supposed to investigate the vehicle-track vertical vibration on constant velocity and several assumptions and simplifications are given accordingly. The rail and the concrete base are modeled as simply supported Euler beams; the track slabs are modeled as free-free Euler beams; the support of fasteners and CA mortar is modeled as spring—damping system; the foundation is assumed as Kelvin foundation with the distribution damping. The vehicle is modeled as plane multi—rigid-body system moving at a constant speed and coupled with the track by assuming the linear Hertz contact between wheels and rails. And also the gravity of structures and vehicles are induced to consider contact relation between track and subgrade. The diagram of the model is presented in Fig. 3.

Schematic section view of ballastless slab track (mm)

Simplified vertical vehicle-track model
Based on the model and vibration theory, the governing differential function of the rails, track slabs and concrete bases were easily obtained as follow:
where \( E_{r} I_{r} ,\;E_{s} I_{s} \) and \( E_{h} I_{h} \) are the bending stiffness of rails, slabs and concrete bases respectively; \( \rho_{r} ,\;\rho_{s} \) and \( \rho_{h} \) are the distributed mass of rails, slabs and concrete bases respectively; \( u_{s} ,\;u_{s} \) and \( u_{s} \) are the displacement responses of rails, slabs and concrete bases respectively and the variate x respects the coordinate along the vehicles’ moving direction. \( f_{sih} (x,t) \) and \( f_{g} (x,t) \) are distributed force between slabs and concrete bases and underneath the concrete bases. \( R_{ij} (t) \) is the wheel-rail contact force; \( A_{ij} (t) \) is the support force of the pad to rail. \( n_{s} \) and \( n_{t} \) is the number of slabs and fasteners on one slab respectively is the Dirac-delta function and is the step function.
As mentioned above, \( R_{ij} (t),A_{ij} (t),f_{sih} (x,t),f_{g} (x,t) \) are the wheel-rail contact force, pad force, vertical pressure in CA mortar and subsoil, respectively. The explicit expressions are given as below:
where \( K_{rs} ,\;k_{sh} ,\;k_{g} \) and \( C_{rs} ,\;c_{sh} ,\;c_{g} \) are the stiffness and damping of pad, CA mortar and embankment soil, respectively. \( K_{wr} \) is the linear stiffness of wheel-rail contact, \( y_{wij} \) is the displacement response of the jth wheel on the ith bogie.
To solve the dynamic differential governing functions above, the mode superposition method are adopted and the modes of simply support beams and free-free beams are employed for rails, concrete bases and slabs. Combining governing functions of vehicle and tracks, the differential governing functions of the coupled system can be:
where nz is the number of DOFs of the whole train-track-ground system. \( \left[ M \right]_{nz \times nz}^{w} ,\left[ C \right]_{nz \times nz}^{w} ,\left[ K \right]_{nz \times nz}^{w} \) are the integral mass, damping and stiffness matrices of the whole system, respectively. \( \left\{ f \right\}_{nz \times 1}^{w} \) is the integral load vector. In this model, the numerical Newmark β method is adopted for solving these equations.
Model Validation
To validate the accuracy of the proposed model, the vibration responses based on coupled model are compared with field test result. Figure 4a shows the comparison of the velocity responses of concrete base measured in Beijing-Tianjin Intercity Passenger Line and simulated based on proposed model, which are both induced by CRH 3 traveling at a constant speed of 292 km/h. And Fig. 4b shows the peak values of the velocity response on concrete base under different train speed. The time-history curve of simulating velocity response shows well agreement with the field test result. And the growth trend of velocity response at increasing train speeds are also coincidental as shown in Fig. 4b. It’s evident that the proposed model can simulate the train induced vibration accurately.

Comparison of velocity response between measured result and computed result
Subgrade Uneven Settlement in Calculation Model
Three Patterns of Uneven Settlement
Different from established model, in this research uneven settlement will be divided into three patterns and modelized respectively according to the contact statues in settlement zone. In the contact pattern, the gravity caused structure deflection fills the settlement zone and the track keeps entire contact with subgrade as shown in Fig. 5a. In the gapped pattern as shown in Fig. 5b, train load induced deflection is smaller than the settlement and the support of subgrade at the settlement zone will be ignored. And in partial contact pattern, the track keeps separation from subgrade at settlement zone in the initial state, and partly contact with the subgrade while the moving trains act on the settlement zone and impact drastic inflection of the track as shown in Fig. 5c.

Contact status of three patterns of settlement in track-subgrade interface
As the different contact status and action mechanisms, relative simplifications and algorithms are adopt for three settlement patterns respectively. For the contact pattern, deformations at track-subgrade interface are assumed to be continuous so that the conventional algorithms is available and applicable, which is wildly adopted in conventional models. For the gapped pattern, all the reaction force of subgrade are regarded to be zero in calculation. And for partial contact pattern, less study and models are put forward so that a new trail-iterate algorithm is proposed and used in this research. More details will be presented in next section.
Trail-Iterate Algorithm in Partial Contact Pattern
In the partial contact pattern, the dynamic vibration response is hard to calculate as both the contact area and contact force are indeterminate in every integral steps. A trail-iterate algorithm is proposed to solve this problem and it works as shown in Fig. 6. In this algorithm, firstly the trial calculation will be done with assuming no contact occurs at settlement zone. With result of this trial computation, the approximate contact area and trail contact force can be determined by comparing the calculated track inflection with settlement curve. Adding the trial contact force into the equation, the related displacement \( {\text{u}}_{\text{i}} \) is solve out. According to the \( {\text{u}}_{\text{i}} \), a new trail contact force is given. And by correct the equation, the displacement \( {\text{u}}_{{{\text{i}} + 1}} \) is solve out. Only when the difference between \( {\text{u}}_{\text{i}} \) and \( {\text{u}}_{{{\text{i}} + 1}} \) is less than the control error e, the calculated displacement u is regarded as the final solution and put into next integral step. By the trail-iterate algorithm, the proposed model can simulate the dynamic vibration in partial contact pattern.

Flow diagram of trail-iterate algorithm
Compared with algorithms in the contact pattern and the gapped pattern, in partial contact pattern the trail-iterate algorithm is new-established and lake of verification. The algorithm which correct contact area and contact force in each integral step is also effective in the scope of other two patterns. Thus to verify the effectiveness of trail-iterate algorithm, two extreme cases are provided: settlement with 5 m wavelength and 3 mm amplitude and settlement with 5 m wavelength and 30 mm amplitude respectively (here the wavelength 5 m is selected corresponding to the length of slab). In the former case which is tend to be the contact pattern, both the algorithm of contact pattern and partial contact pattern are both employed. Comparison of calculated wheel-rail contact forces are illustrated in Fig. 7a. In the later case which is tend to be the gapped pattern, both the algorithm of gapped pattern and partial contact pattern are employed. Their contact forces are in comparison as show in Fig. 7b. For both Fig. 7a, b, the contact force based on partial contact pattern shows commendable agreement with the result based on other two contact patterns. It’s indicated that the new trail-iterate algorithm is effective in calculation of vehicle-track interaction.

Comparison of contactforce in partial contact pattern and another two patterns
As declared above, calculation results in different patterns will tend to be consistent when the settlement is at the junction of two adjacent pattern scopes. Accordingly, the scope boundary of three patterns can be found out by comparing calculation results of a range of cases in three patterns. For example, based on calculation, the scopes will be 0~7 mm amplitude for contact pattern, 7~30 mm amplitude for partial contact pattern and over 30 mm amplitude for gapped pattern when the wavelength of settlement is 5 m it’s indicated that amount of uneven settlements are divided into partial contact pattern and gapped pattern especially when the settlement wavelength is short, which used to be considered to be contact pattern in conventional models.
Vibration Responses at the Settlement Zone
In this section, the responses of wheel-rail contact force and vehicle vertical acceleration in three patterns are introduced in the cases of uneven settlement with wavelength 5 m, amplitude 15 mm and wavelength 5 m, amplitude 35 mm respectively. For the former case, the settlement is in the scope of partial contact pattern and for the later case, the settlement is in the scope of gapped pattern. In two cases, the dynamic responses are calculated based on appropriate pattern. The dynamic responses based on contact pattern are also adopted as comparison in these two cases as the contact pattern shares the same assumption and simplification with conventional model.
It’s obvious that dynamic responses based on contact pattern are greatly exceed the dynamic responses based on their appropriate pattern as shown in Fig. 8, which means that in the scope of partial contact pattern and gapped pattern, the use of conventional models will markedly overrate the dynamic responses aroused by the uneven settlement. The proposed model which divides settlement into three patterns and calculate the response accordingly is indispensable.

Dynamic responses in two cases based on three patterns
Conclusion
High speed moving train load will arouse drastic dynamic response under the affect of uneven settlement. To investigate the dynamic interaction of vehicle-track system, a vertical couple model based on ballastless track is introduced and validated by the field test. In the proposed model, uneven settlements are divided into three pattern and relative algorithms and assumptions are adopted for each pattern. The results of this paper can be summarized as follows:
-
1.
The vertical vehicle-track coupled model is introduced and well validated by the field test in Beijing-Tianjin Intercity Passenger Line.
-
2.
According to the track-subgrade contact status at the interface, settlement are divided into three patterns. In partial contact pattern, a new-established trail-iterate algorithm is used to correct the contact status in each integral step.
-
3.
In the scope of gapped pattern and partial contact pattern, the dynamic response based on conventional assumption and algorithm will be greatly overrated. The proposed model which divides settlement into three patterns and calculate the response accordingly is indispensable.
References
Huanping Song. (2011). Theoretical and field test analysis of high-speed train and slab track coupling interaction [D]. Zhejiang University, Master.
Huanping Song, Xuecheng Bian, Jianqun Jiang, Yunmin Chen. (2012). Correlation between subgrade settlement of high-speed railroad and train operation speed [J]. Journal of Vibration and Shock, 31(10):134–140.
Chenbiao Cai, Peng Xu. (2010). Dynamic analysis of key design parameters for ballastless track of high-speed railway [J]. Journal of Southwest Jiaotong University, 45(4):493–497.
Chenbiao Cai, Wanming Zhai, Yunkai Wang. (2006). Calculation and assessment analysis of the dynamic performance for slab track on Sui-Yu Railway [J]. China Railway Science, 27(4):17–21.
Zhang, X., Burrow, M., & Zhou, S. (2016). An investigation of subgrade differential settlement on the dynamic response of the vehicle–track system. Proceedings of the Institution of Mechanical Engineers Part F Journal of Rail & Rapid Transit, 230.
Wang, P., Chen, R., Chen, X. P., Wang, P., Chen, R., & Chen, X. P. (2010). Dynamic Assessment of Ballastless Track Stiffness and Settlement in High-Speed Railway. Joint Rail Conference (pp. 203–207).
Acknowledgements
The research works involved in this paper are supported by the Natural Science Foundation of China (No. 51678524 and No. 51561130159).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Singapore Pte. Ltd. and Zhejiang University Press
About this chapter
Cite this chapter
Duan, X., Hu, J., Bian, X., Jiang, J. (2018). Dynamic Interaction of Vehicle-Track Coupled System Under Different Patterns of Uneven Settlement. In: Bian, X., Chen, Y., Ye, X. (eds) Environmental Vibrations and Transportation Geodynamics. ISEV 2016. Springer, Singapore. https://doi.org/10.1007/978-981-10-4508-0_52
Download citation
DOI: https://doi.org/10.1007/978-981-10-4508-0_52
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-4507-3
Online ISBN: 978-981-10-4508-0
eBook Packages: EngineeringEngineering (R0)